基于多路電機同步控制的ADB控制器設計
2018-11-09 05:23:36王金磊劉正全徐健薛蔚平豐建芬
汽車零部件 2018年10期
王金磊,劉正全,徐健,薛蔚平,豐建芬
(常州星宇車燈股份有限公司,江蘇常州 213000)
0 引言
隨著當今汽車保有量越來越多,不少司機不會合理操作遠近光。據統計,每年超過30%的夜間交通事故都是因為濫用遠光造成,解決夜間遠光問題已經成了大眾迫切的需要,因此迫切需要智能化的自適應遠光系統,這將對降低夜間重大交通事故的財產損失和人員傷亡具有重要意義。
ADB(Adaptive Driving Beam)是自適應遠光輔助的簡稱,通過安裝在后視鏡上的相機,獲取前車圖像信息,經處理后使大燈光型產生多種光型的自由切換,實現可變化的照明暗區,有效避免會車和跟車產生的遠光眩光,從而提升夜間行車安全性,降低夜間駕車疲勞感,提高駕駛舒適度。
文中提出一種基于多路電機同步控制的ADB控制器設計,實現同步控制多路電機進行多種光型自由切換的功能。
1 基于多路電機同步控制的ADB控制器電路設計要求
1.1 ADB控制器電路的設計要求
ADB控制器電路設計中,分為兩大控制模塊:ADB-Master主控制器模塊和ADB-Slave從控制器模塊。每輛車配備有一塊ADB-Master主控制器模塊,放置于駕駛室中間位置,兩塊ADB-Slave從控制器模塊分別與左右大燈PES集成在一起。
ADB-Master主控制模塊的設計目標為實現CAN報文和LIN報文的信號互轉。其主控制模塊由3個主要子模塊構成:CAN通信模塊、MCU處理器模塊、LIN通信模塊。首先ADB-Master主控制模塊通過CAN總線和整車BCM實現通信,實時獲取前車圖像信息及相關車身指令。然后經CAN收發器對所獲取的CAN報文進行處理后,發送給單片機處理,單片機處理后的信息將發送給LIN收發器,從而ADB-Master主控制模塊最終以LIN報文的形式將控制信息發送給左右ADB-Slave從控制模塊。
ADB-Slave從控制模塊的設計目標為控制多路電機的同步運轉。其從控制模塊由3個主要子模塊構成:LIN通信模塊、MCU處理器模塊、電機驅動模塊。LIN通信模塊將接收來自ADB-Master的LIN報文信息,處理后發送給處理器模塊,由處理器將動作執行命令發送到電機驅動模塊,從而由電機驅動模塊同步控制三路步進電機(分別為水平電機、垂直電機和多光型遮光板電機)進行遠光、近光及ADB光型的切換,實現可變化的照明暗區。
基于多路電機同步控制的ADB控制器電路組成如圖1所示。
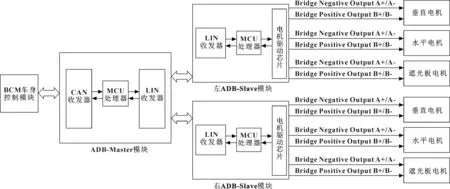
圖1 基于多路電機同步控制的ADB控制器電路組成
1.2 MCU、CAN/LIN總線收發器及電機驅動芯片的選擇
ADB-Master主控制模塊的CAN收發器采用NXP的TJA1041[1]。
ADB-Master主控制模塊和ADB-Slave從控制模塊的MCU采用同一型號,即飛思卡爾的16位單片機MC9S12G192[2]。該MCU 擁有3路SCI接口,1路MSCAN接口,3路SPI接口,8路獨立的PWM通道以及16路ADC采樣口。
ADB-Master主控制模塊和ADB-Slave從控制模塊的LIN收發器采用NXP的TJA1021[3]。
ADB-Slave從控制模塊的電機驅動芯片采用ST的L9942[4],該芯片與MCU通過SPI進行通信,MCU通過PWM來控制L9942對電機進行步進模式調整。
1.3 電機驅動芯片及驅動電路介紹
ST的L9942是一款集成的雙極步進電機驅動器,具有細分模式和可編程電流配置表,能靈活適應步進電機的特性和預期的工作情況。可編程堵轉檢測在前燈水平調整和彎道調整應用中非常有用,可以防止堵轉時電機為了轉到位置而長時間地運行。如果檢測到堵轉,對準過程被關閉,并且噪聲被最小化。
該芯片最大輸出電流可達到1.3 A;待機模式下功耗很低,小于3 μA;擁有多項輸出檢測:過壓與欠壓檢測,負載電流控制和過流檢測,堵轉檢測,溫度預警和熱關斷。
L9942驅動芯片通過SPI獲取MCU的指令信息;通過STEP信號來調整步進模式: 全步、半步、細步、微步;通過PWM向MCU反饋電機運轉狀態。L9942通過輸出四路控制信號對電機進行全橋控制。L9942驅動電路如圖2D所示。
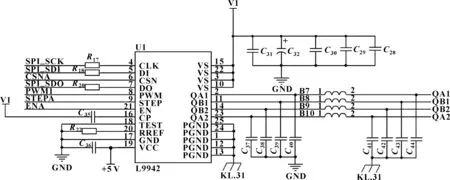
圖2 L9942驅動電路
2 實驗驗證
2.1 示波器抓取的CAN模塊和LIN模塊通信報文
CAN總線具有實時性強、連線簡單、傳輸距離遠、抗電磁干擾能力強、傳輸速率高(通信速率最高可達1 Mb/s)、成本低的優勢。由于CAN總線的高可靠性及獨特的設計,使其越來越受到汽車領域的重視。LIN總線是面向汽車低端分布式應用的低成本、低速率(20 kb/s)、串行通信總線,不需要仲裁和沖突管理機制,節省資源,適合用于診斷和驅動多路電機。LIN總線的驅動/接收器規范遵從ISO 9141-1989標準,且EMI性能較好。
通過示波器,捕捉了ADB-Master主控制模塊獲取的車身CAN總線報文,以及ADB-Master主控制模塊和ADB-Slave從控制模塊之間的LIN總線報文。通過CAN/LIN報文的轉化實現了ADB-Master主控制模塊對ADB-Slave從控制模塊的控制。
CAN總線報文如圖3所示,LIN總線報文如圖4所示。

圖3 CAN接收報文
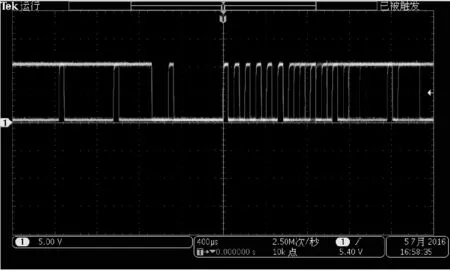
圖4 LIN接收報文
2.2 通過獨立PWM通道實現多路電機的同步控制
PWM(Pulse Width Modulation,脈沖寬度調制)是一種對脈沖寬度調制的模擬控制方式,利用MCU的數字輸出對模擬電路進行控制的一種技術手段,優點是控制簡單、靈活和動態響應快。選取的MCU擁有8個獨立的8-Bit PWM通道,每一路PWM波獨立控制,互不干擾,通過SPI總線與MCU通信,報文之間的信息間隔只有33 ms,解決了多路步進電機的同步控制問題,即在大燈高度調節和水平角度調節的同時,完成遠近光光型的切換,其控制信號波形如圖5所示。

圖5 3路電機PWM同步控制信號波形
2.3 全步、半步、1/4細步、1/8微步等不同模式的電流輸出波形
電機驅動芯片L9942支持4種步進模式: 全步、半步、細步、微步。通過示波器抓取電流輸出波形,證明4種模式的實現。4種電流輸出波形如圖6—圖9所示。
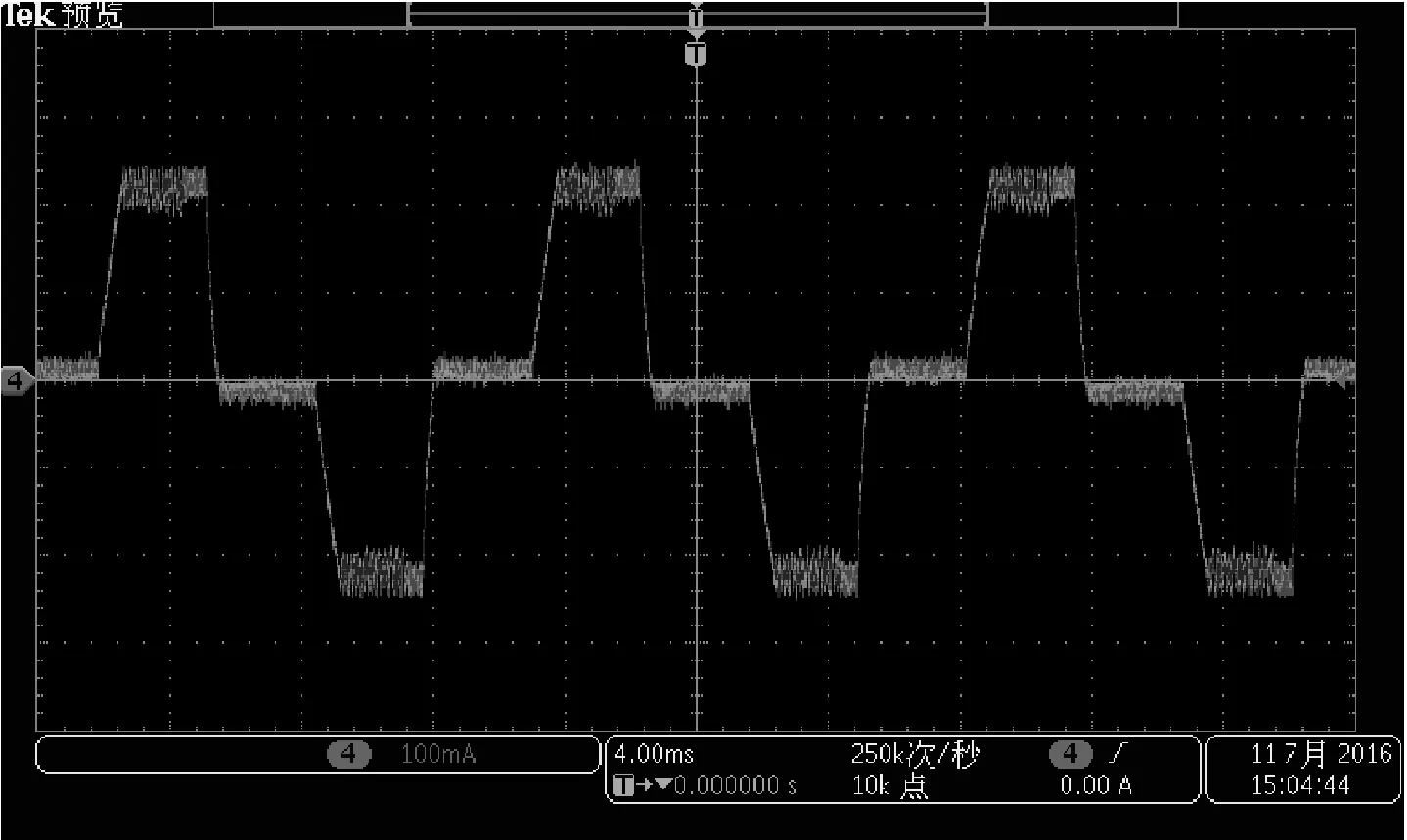
圖6 全步模式電流輸出波形

圖7 半步模式電流輸出波形

圖8 1/4細步模式電流輸出波形
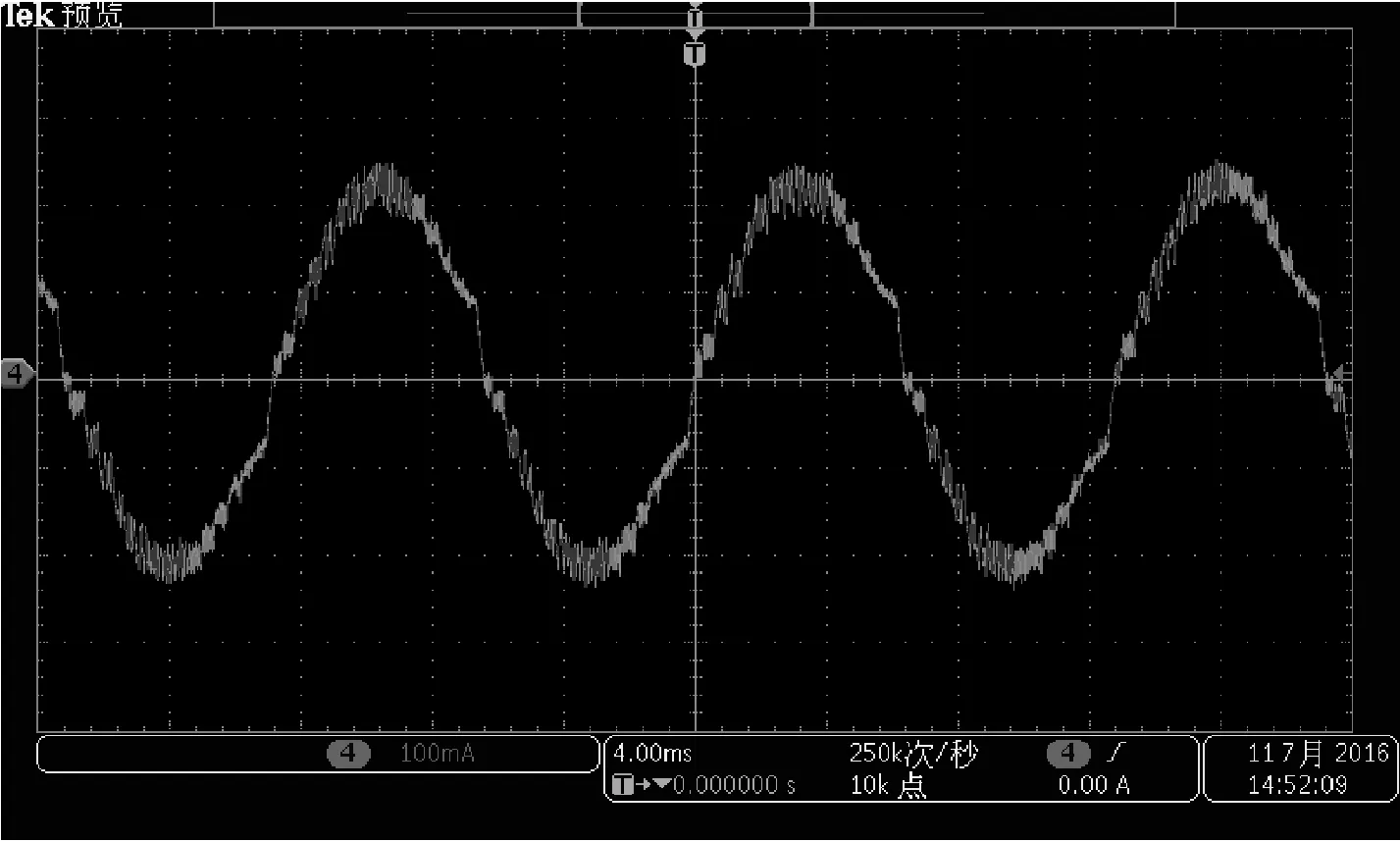
圖9 1/8微步模式電流輸出波形
2.4 電機堵轉發生判斷
當電機發送堵轉時,可以通過讀取堵轉引腳的值來判斷,當芯片的堵轉引腳從0置1,則證明電機發生了堵轉。此時MCU會對電機狀態進行復位,使電機回到初始位置。
圖10為示波器捕捉的堵轉引腳跳轉波形。

圖10 芯片的堵轉引腳輸出為1時,堵轉發生
3 結論
提出了一種基于多路電機同步控制的ADB控制器設計。通過多項試驗以及實際道路實驗證實該設計滿足設計要求,可以在復雜路況下根據前方圖像識別自由切換光形(遠光、近光、ADB暗區光形),實現可變化的照明暗區,有效地避免在跟車與會車時發生遠光炫目。這款設計不僅能提高駕駛者的行車舒適度,更提高了道路行車的安全性,擁有非常好的市場前景。
