對轉(zhuǎn)永磁同步電機無差拍預(yù)測控制
2018-11-09 01:59:08黃守道馬河濤張其松王家堡
大電機技術(shù) 2018年5期
黃守道,馬河濤,張其松,王家堡
?
對轉(zhuǎn)永磁同步電機無差拍預(yù)測控制
黃守道,馬河濤,張其松,王家堡
(湖南大學(xué)電氣與信息工程學(xué)院,長沙 410082)
在建立對轉(zhuǎn)永磁同步電機(Anti-rotary permanent synchronous motor,Anti-rotary PMSM )在d-q坐標系下數(shù)學(xué)模型的基礎(chǔ)上,針對負載突變,兩側(cè)轉(zhuǎn)子轉(zhuǎn)速發(fā)生變化,由于PI調(diào)節(jié)速度較慢,兩側(cè)轉(zhuǎn)子易發(fā)生失步,導(dǎo)致系統(tǒng)不可控的現(xiàn)象,提出電流環(huán)采用無差拍預(yù)測控制,速度環(huán)采用PI調(diào)節(jié)器的雙閉環(huán)控制策略。在Matlab/Simulink中搭建仿真模型,仿真結(jié)果表明,該控制方法在穩(wěn)定運行和突加負載的情況下,具有轉(zhuǎn)速變化小,穩(wěn)定性好的優(yōu)點,無差拍預(yù)測控制比傳統(tǒng)的PI調(diào)節(jié)器動態(tài)響應(yīng)快,可以有效解決對轉(zhuǎn)電機的失步問題。
對轉(zhuǎn)永磁同步電機;無差拍預(yù)測控制;矢量控制
0 前言
21世紀是海洋的世紀,在海洋探索過程中自主水下航行器正發(fā)揮著越來越重要的作用,世界上諸多國家已在開展水下自主航行器的研究工作[1-2]。對轉(zhuǎn)螺旋槳技術(shù)是現(xiàn)代海洋裝備驅(qū)動的主流技術(shù),后槳葉能夠有效利用前槳葉未利用的渦動能,節(jié)能10%~20%。傳統(tǒng)的對轉(zhuǎn)螺旋槳由2臺獨立的電機或者1臺電機加行星齒輪驅(qū)動,體積龐大,可控性較差。文獻[3]設(shè)計了一種可直接驅(qū)動對轉(zhuǎn)螺旋槳的盤式單定子雙轉(zhuǎn)子永磁同步電機,其結(jié)構(gòu)由一個定子和兩個永磁轉(zhuǎn)子組成,兩個永磁轉(zhuǎn)子分別處于定子的兩側(cè),只需用一套三相變頻器驅(qū)動。該電機具有體積小,結(jié)構(gòu)簡單,效率高,低振動的特點,非常適合于如魚雷等水下航行器的對轉(zhuǎn)螺旋槳的驅(qū)動。文獻[4]根據(jù)永磁電機原理,用電機電壓電流表達式在Matlab/Simulink中搭建了對轉(zhuǎn)電機的模型,通過仿真驗證了本體設(shè)計可行性,并且將矢量控制應(yīng)用于對轉(zhuǎn)電機控制,對兩轉(zhuǎn)速調(diào)節(jié)器的輸出量取均值再進行q軸電流的調(diào)節(jié),在負載轉(zhuǎn)矩相同且恒定時,兩轉(zhuǎn)子轉(zhuǎn)速能保持一致,但當負載不對稱突變時,轉(zhuǎn)子容易失步。文獻[5]~[6]對永磁無刷直流電機速度環(huán)分別采用模糊PI控制和分離積分項的雙輸入模糊控制,實現(xiàn)了轉(zhuǎn)速快速調(diào)節(jié)和穩(wěn)定運行,但是對兩轉(zhuǎn)子不對稱運行中存在對失步問題沒有提及。文獻[7]~[8]將直接轉(zhuǎn)矩控制應(yīng)用于對轉(zhuǎn)電機,采用外轉(zhuǎn)子轉(zhuǎn)速計算參考轉(zhuǎn)矩,并使用參考磁鏈來調(diào)節(jié)外轉(zhuǎn)子磁鏈,可以讓內(nèi)轉(zhuǎn)子轉(zhuǎn)速跟隨外轉(zhuǎn)子轉(zhuǎn)速,但是仍然會出現(xiàn)兩轉(zhuǎn)子失步現(xiàn)象。
近年來對轉(zhuǎn)電機控制方法的研究取得一定的成果,但大多局限于平衡負載下的研究,當負載突變不對稱時,控制性能還達不到要求。對轉(zhuǎn)永磁同步電機是一個非線性,多變量,強耦合的復(fù)雜系統(tǒng),控制非常復(fù)雜。早在1985年,Gokhale 最先提出了無差拍控制策略,并將其應(yīng)用在電力電子變流器中[9],該控制方法可以大幅度地提升系統(tǒng)響應(yīng)速度,并能實現(xiàn)精確控制,因此,無差拍控制技術(shù)近年來得到了廣泛的應(yīng)用。
本文首先研究對轉(zhuǎn)永磁同步電機數(shù)學(xué)模型,其次介紹無差拍預(yù)測控制等原理,在此基礎(chǔ)上將無差拍預(yù)測控制應(yīng)用于對轉(zhuǎn)電機,仿真結(jié)果表明本文提出的控制策略有效解決了對轉(zhuǎn)電機不對稱負載下的失步問題,同時保證控制系統(tǒng)較快的動態(tài)響應(yīng)和較小的靜態(tài)誤差。
1 對轉(zhuǎn)永磁同步電機原理及其數(shù)學(xué)模型
由于對轉(zhuǎn)永磁同步電機的特殊繞線方式,給定子通入對稱三相電流時,會在兩側(cè)氣隙中產(chǎn)生一對方向相反,轉(zhuǎn)速相同的旋轉(zhuǎn)磁場,據(jù)此對轉(zhuǎn)永磁同步電機可等效為串聯(lián)的兩個參數(shù)相同的永磁同步電機。為模型推導(dǎo)和數(shù)學(xué)分析,需做如下假設(shè):(1)假設(shè)轉(zhuǎn)子永磁磁場在氣隙空間呈正弦分布,定子繞組中的感應(yīng)電動勢也是正弦波;(2)假設(shè)磁路線性且不飽和,電感參數(shù)恒定;(3)忽略電機渦流損耗與磁滯損耗;(4)轉(zhuǎn)子上無阻尼繞組。
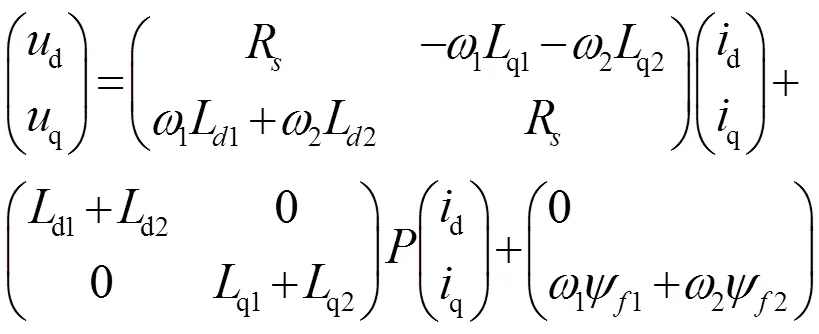
參考普通永磁同步電機的數(shù)學(xué)模型,建立對轉(zhuǎn)電機數(shù)學(xué)模型。在d-q坐標系下的定子電壓方程如下:

對轉(zhuǎn)電機電磁轉(zhuǎn)矩方程:
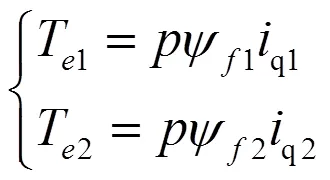
式中,為極對數(shù);T1,T2分別為兩轉(zhuǎn)子的電磁轉(zhuǎn)矩。
為構(gòu)建對轉(zhuǎn)電機的預(yù)測模型,首先選擇d-q軸電流作為狀態(tài)變量,選擇d-q軸電壓矢量作為輸入信號矢量。
由式(1)可得系統(tǒng)的狀態(tài)空間函數(shù)

在預(yù)測控制算法中,每一步預(yù)測都是以一個周期內(nèi)電流和轉(zhuǎn)速保持不變?yōu)榍疤帷K孕枰脷W拉算法將對轉(zhuǎn)永磁同步電機模型做離散化處理。其原理為
式中,為采樣周期。
對轉(zhuǎn)永磁同步電機的離散化數(shù)學(xué)模型為
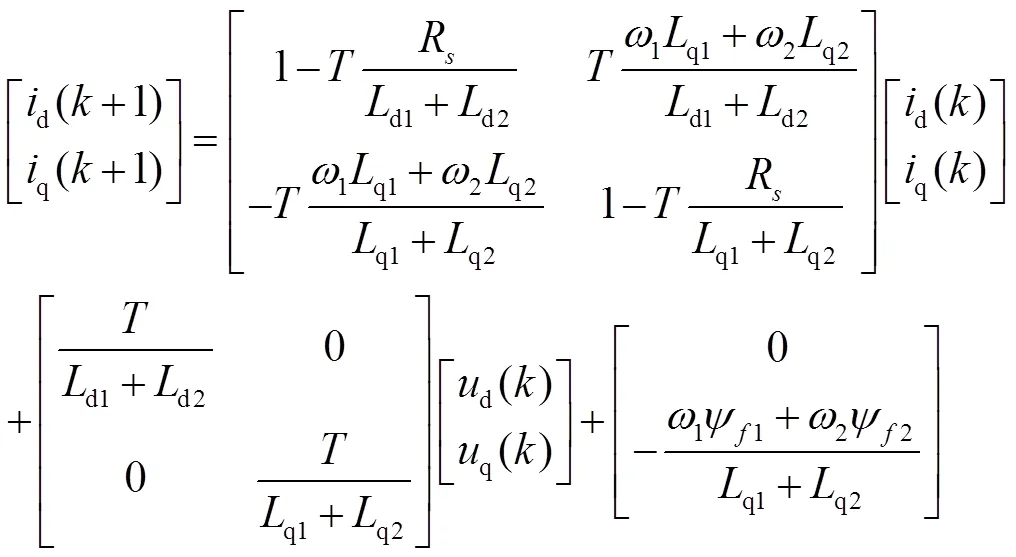
圖1所示為Matlab/simulink仿真對轉(zhuǎn)電機本體模型和電機實物圖。
2 對轉(zhuǎn)電機無差拍預(yù)測控制器的設(shè)計
無差拍預(yù)測控制的基本原理是:將+1時刻的電流預(yù)測值作為時刻的電流給定值,然后將該電流送入電壓計算表達式求得電壓指令值,再將該值送入 PWM模塊,獲得最終需要的開關(guān)信號。
因為盤式對轉(zhuǎn)永磁同步電機沒有凸極效應(yīng),所以可假設(shè)d1d2q1q2= L。
整理公式(5)得在+1時刻d,q的預(yù)測值
根據(jù)無差拍控制技術(shù)的基本原理,令
式中,id(),iq() 為第時刻的電流給定值。將式(7)帶入式(6)并整理可以得到第時刻的電壓給定值:

式中,U*d(k), U*q(k)為k時刻施加在PWM 模塊上的電壓值。無差拍預(yù)測控制器實現(xiàn)框圖如圖2所示。
對轉(zhuǎn)永磁同步電機整體控制框圖如圖3所示。

圖3 對轉(zhuǎn)電機整體控制框圖
3 仿真研究
為了驗證文中所提出無差拍預(yù)測控制策略的優(yōu)良性能,在Matlab/Simulink環(huán)境下與傳統(tǒng)的PI控制進行了仿真結(jié)果對比。
設(shè)置對轉(zhuǎn)永磁同步電機的參數(shù)為:額定電壓560V,電樞電阻為2.875Ω,極對數(shù)為4,雙邊轉(zhuǎn)子的dq軸電感均為4.25mH,轉(zhuǎn)動慣量為0.08 kg·m2兩轉(zhuǎn)子的永磁磁鏈均為0.175Wb。
3.1 平衡負載下的對比仿真
仿真時長0.5s,對轉(zhuǎn)永磁同步電機兩側(cè)轉(zhuǎn)子帶10N·m的平衡負載啟動,在0.15s時使兩側(cè)平衡負載變?yōu)?N·m,在0.2s時兩側(cè)轉(zhuǎn)子平衡負載恢復(fù)為10N·m。圖4、5分別為平衡負載下傳統(tǒng)矢量控制和無差拍預(yù)測控制的仿真結(jié)果圖。
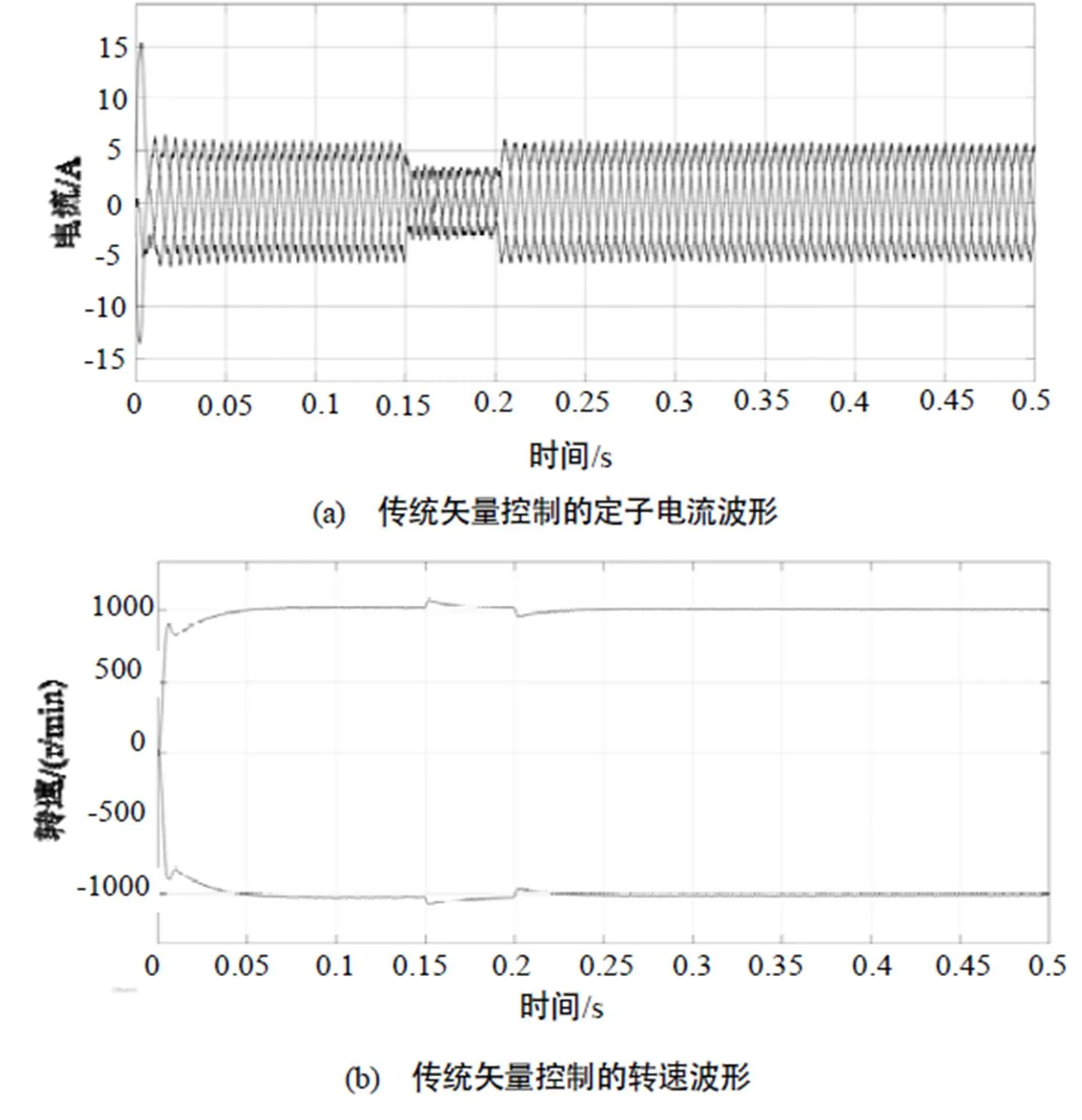
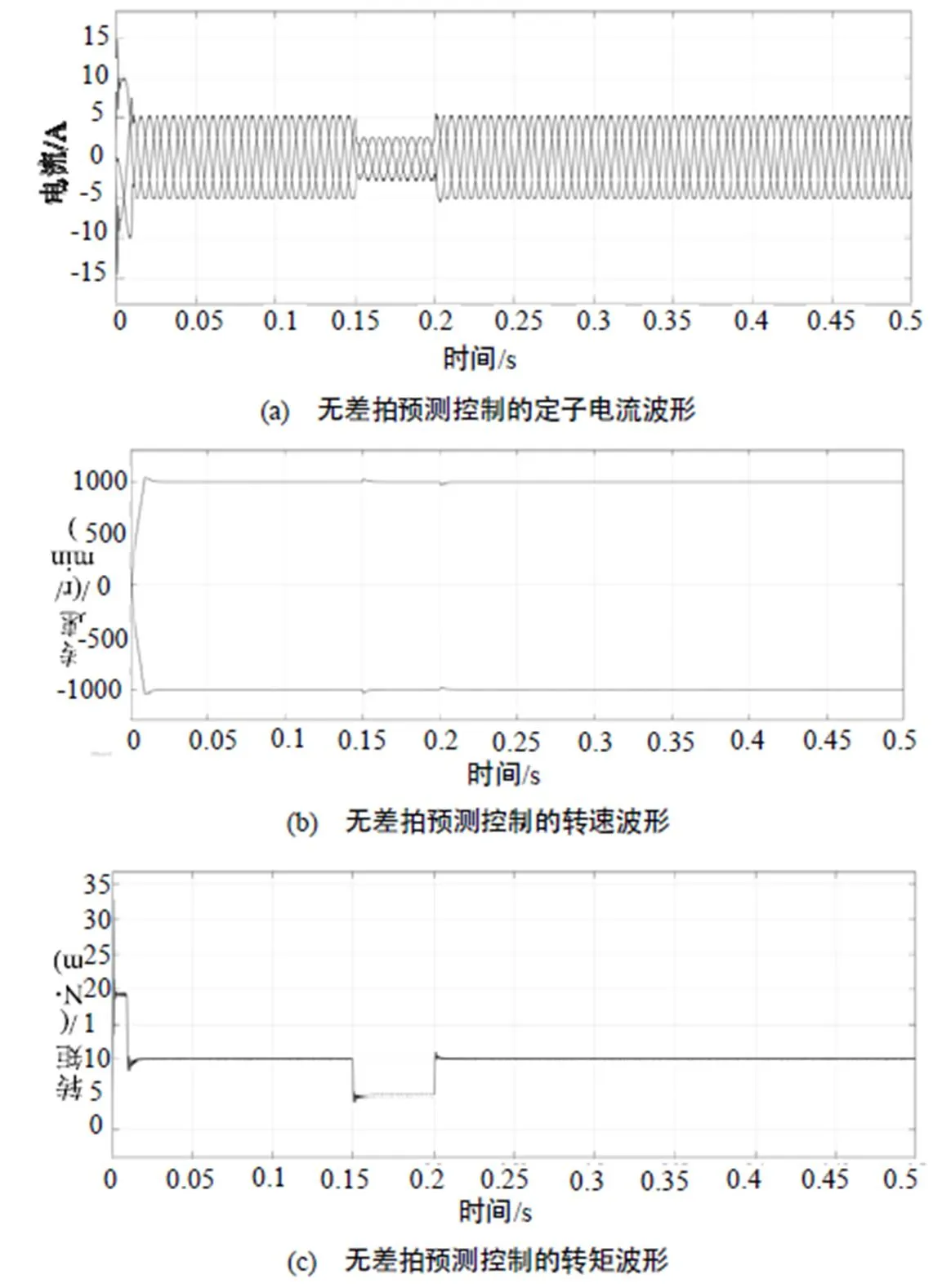
圖5 平衡負載下無差拍預(yù)測控制的仿真結(jié)果圖
由圖4、5可知,在傳統(tǒng)矢量控制模式下,對轉(zhuǎn)電機諧波電流較大,達到給定速度需要0.05s,動態(tài)響應(yīng)速度較慢;當電機運行趨于穩(wěn)定后,轉(zhuǎn)矩波動幅度很大,不利于對轉(zhuǎn)電機的運行,也表明傳統(tǒng)矢量控制性能有待改進。在無差拍預(yù)測控制方式下,對轉(zhuǎn)電機電流波形平滑對稱,達到給定速度僅需要0.01s,具有更快的動態(tài)響應(yīng)速度,電機穩(wěn)定運行時,轉(zhuǎn)矩基本保持恒定,表明無差拍預(yù)測控制具有較好的控制性能。
3.2 不平衡負載下的對比仿真
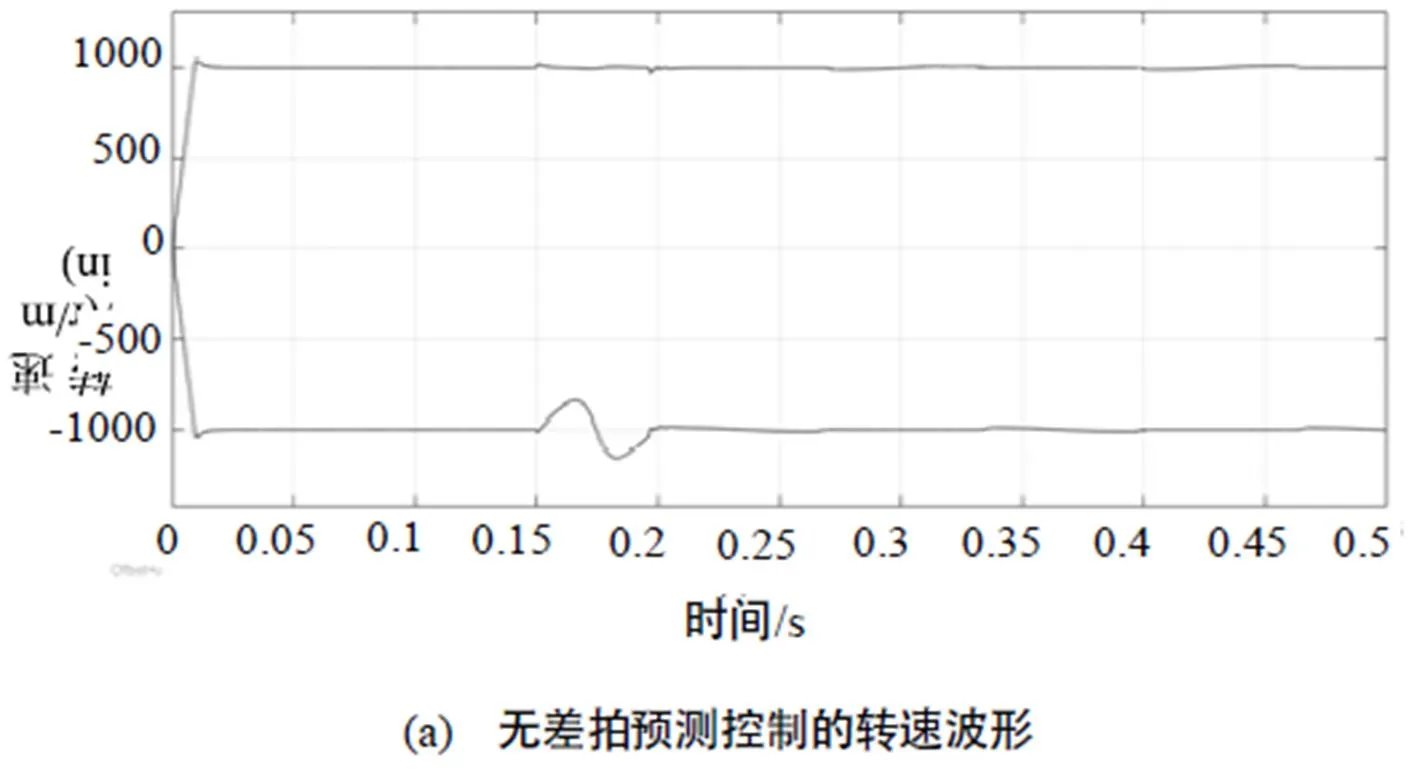
仿真時長為0.5s,對轉(zhuǎn)永磁同步電機兩側(cè)轉(zhuǎn)子帶10N/m的平衡負載啟動,在0.15s時兩側(cè)變?yōu)椴黄胶庳撦d5N·m和6N·m,在0.2s時兩邊轉(zhuǎn)子負載恢復(fù)為平衡負載10N·m。圖6、7分別為不平衡負載下傳統(tǒng)矢量控制和無差拍預(yù)測控制的仿真結(jié)果圖。
由圖6、7可知,當對轉(zhuǎn)永磁同步電機處于傳統(tǒng)矢量控制模式下,兩側(cè)負載發(fā)生不對稱突變時,兩側(cè)轉(zhuǎn)子發(fā)生失步現(xiàn)象,電機處于不可控狀態(tài),由此可知傳統(tǒng)矢量控制不能夠滿足對轉(zhuǎn)電機的控制要求。當電機處于無差拍預(yù)測控制方式下,電機負載發(fā)生不對稱突變時,兩側(cè)轉(zhuǎn)子速度雖出現(xiàn)波動,但是當電機恢復(fù)至對稱負載時,電機可以逐步恢復(fù)至同步狀態(tài)并穩(wěn)定于給定速度,同時從轉(zhuǎn)矩波形和電流波形也能夠看出,對轉(zhuǎn)永磁同步電機在不對稱負載消除后能夠逐步恢復(fù)穩(wěn)定狀態(tài)。

圖6 不平衡負載下傳統(tǒng)矢量控制的仿真結(jié)果圖
4 結(jié)論
本文在建立對轉(zhuǎn)永磁同步電機模型,介紹無差拍控制原理的基礎(chǔ)上提出電流環(huán)采用無差拍預(yù)測控制,速度環(huán)采用PI調(diào)節(jié)器的雙閉環(huán)控制策略,通過在對稱負載和不對稱負載下仿真研究,表明本文提出的控制策略能夠有效降低諧波電流,克服傳統(tǒng)矢量控制調(diào)節(jié)速度慢和負載不對稱突變時雙邊轉(zhuǎn)子易失步的缺點,滿足對轉(zhuǎn)永磁同步電機的使用要求。
[1] METIN A, HUANG S, LIPO T A. Design, analysis, and control of a hybridfield-controlled axial-flux permanent-magnet motor [J]. IEEETransactions on Industrial Electronics, 2010, 57(1): 78 – 87.
[2] 張式勤, 邱建琪, 儲俊杰, 等. 雙轉(zhuǎn)式永磁無刷直流電動機的建模與仿真 [J]. 中國電機工程學(xué)報, 2004, 24(12): 180 -185.
[3] Caricchi F, Crescimbini F, Santini E. Basic principle and design criteria of axial-flux PM machines having counter rotating rotors[J]. IEEE Transactions on Industry Applications, 1995, 31(5): 1062-1068.
[4] 徐海珠,謝順依,張林森等.對轉(zhuǎn)永磁同步推進電機的矢量控制[J].微電機,2011,10:10-13.
[5] 鄭勇,李宏,張群等.基于模糊PI 混合控制的自主水下航行器推進系統(tǒng)[J].測控技術(shù),2011.30(10):65-67.
[6] 鄭勇,李宏,張群等.基于模糊控制的對轉(zhuǎn)永磁無刷直流電動機調(diào)速系統(tǒng)[J].微電機,2011,4:40-42
[7] 張恒.盤式對轉(zhuǎn)永磁同步電機控制方法研究[D].湖南大學(xué),2014.
[8] 姜燕,黃鐘,成雙銀等.對轉(zhuǎn)永磁同步電機直接轉(zhuǎn)矩控制[J].電工技術(shù)學(xué)報,2015,30(10):101-107.
[9] Oikonomou N,Gutscher C,Karamanakos P,et al. Model Predictive Pulse Pattern Control for the Five-level Active NeutralPoint Clamped Inverter[J].IEEE Transactions on Industry Applications,2013,49(6):2583-2592.
Control of Anti-rotary PMSM based on Deadbeat Predictive Control
HUANG Shoudao, MA Hetao, ZHANG Qisong, WANG Jiabao
(College of Electrical and Information Engineering, Hunan University, Changsha 410082, China)
Based on the mathematical model of the anti-rotary permanent synchronous motor in the d-q coordinate system, the rotor speed on both sides is changed due to the sudden load change. Because the PI adjustment speed is slow, both sides of the rotor are prone to out-of-step, resulting in uncontrollable system. It is proposed that the current loop adopts deadbeat predictive control, and the speed loop adopts a PI controller dual closed-loop control strategy.The simulation model is built in Matlab/Simulink. The simulation results show that the control method has the advantages of small speed change and good stability under the conditions of stable operation and sudden load. The performance of the dead-beat predictive control is better than that of traditional PI regulators in fast response, can effectively solve the problem of out-of-step motor.
anti-rotary PMSM; dead-beat predictive control; vector control
TM351
A
1000-3983(2018)05-0025-06
2018-06-10
黃守道(1962-),2005年畢業(yè)于湖南大學(xué),博士,博士生導(dǎo)師,主要研究方向為電力推進與伺服傳動技術(shù),教授。