柔輪凸齒廓半徑對雙圓弧諧波齒輪傳動摩擦學性能的影響
2018-11-13 04:01:50裴欣周廣武王家序楊勇張振華胡如康
中南大學學報(自然科學版) 2018年10期
裴欣,周廣武,王家序, 2,楊勇,張振華,胡如康
?
柔輪凸齒廓半徑對雙圓弧諧波齒輪傳動摩擦學性能的影響
裴欣1,周廣武1,王家序1, 2,楊勇1,張振華1,胡如康1
(1. 四川大學 空天科學與工程學院,四川 成都,610065; 2. 重慶大學 機械傳動國家重點實驗室,重慶,400044)
基于改進的運動學法,利用嚙合不變矩陣建立公切線雙圓弧柔輪齒廓弧長參數方程和理論嚙合方程,可求得理論共軛嚙合區以及剛輪齒廓參數。綜合考慮真實表面粗糙度、載荷、輪齒幾何接觸、卷吸速度等,建立雙圓弧齒廓諧波減速器柔輪與剛輪在共軛嚙合區域的混合潤滑數學模型。分析嚙合區域不同齒廓參數對于諧波傳動裝置潤滑性能的影響。研究結果表明:在設計柔輪齒廓的時候,合理增加凸圓弧齒廓的半徑有利于改善接觸區域潤滑狀態。在工況不變的情況下特別是在中高速的工況下,加大柔輪凸圓弧齒廓半徑可以增加接觸區油膜厚度,增大膜厚比,且改善的效果隨著轉速的增加而增大,但當凸齒廓半徑增大到很接近凹齒廓半徑時,繼續增加幾乎不改善潤滑條件。
雙圓弧齒廓;齒廓參數;潤滑;優化分析
諧波齒輪傳動裝置具有傳動比大、傳動精度高、可以通過密封壁傳遞運動、真空條件下工作性能好、回差小等特點,使得其在航空航天、機器人、原子反應堆等領域得到了廣泛的應用。然而,在諧波齒輪傳動裝置的失效中,大部分為潤滑不良引起的輪齒接觸失效,如磨損、裂紋、點蝕、發熱等,因此,對雙圓弧諧波齒輪傳動裝置輪齒接觸區域的潤滑特性進行研究,對于提高諧波減速器性能具有十分重要的工程價值。現在廣泛應用的雙圓弧齒形是由ISHIKAWA[1]提出并獲得專利,后來ISHIKAWA[2]又在已有的柔輪齒形上進行了改進。辛洪兵等[3]引入了改進的運動學法簡化了共軛齒廓的求解過程,并給出了雙圓弧諧波齒輪傳動柔輪和剛輪基本齒廓的設計過程。張有枕等[4]指出工程實際中雙圓弧齒輪的油膜形成能力比漸開線型齒輪好,并且用多元線回歸的方法整理出了某一型號雙圓弧齒輪最小膜厚及中心膜厚的經驗計算公式。ZHU等[5]考慮了真實表面接觸情況,發表了滾子真實幾何形狀與表面粗糙度接觸的有限長線接觸混合潤滑模型建立方法。為幾何體的復雜接觸潤滑分析提供了手段。楊勇等[6]基于改進的運動學法,從縮小共軛齒廓差異增大嚙合區間的角度,提出了一種“雙共軛”的齒廓優化方法,但是由于決定諧波齒廓的參數較多,在滿足“雙共軛”的情況下,齒廓參數依然有足夠的優化空間。吳繼強等[7]對比分析了漸開線型與雙圓弧齒形諧波齒輪傳動共軛嚙合區的潤滑性能,指出雙圓弧齒廓對于油膜厚度,壓力峰等有明顯改善,但沒有對雙圓弧齒廓具體參數對潤滑效果的影響進行深入分析。目前關于雙圓弧齒輪傳動裝置混合潤滑分析的研究較少,因此,本文作者針對公切線雙圓弧齒廓諧波齒輪傳動裝置,基于改進的運動學原理,利用嚙合不變矩陣建立公切線雙圓弧柔輪齒廓弧長參數方程和理論嚙合方程,求得理論共軛嚙合區以及剛輪齒廓參數,并用擬合的方法得到剛輪齒廓的近似曲率;在這些基礎上,建立綜合考慮真實表面粗糙度、載荷、輪齒幾何接觸、卷吸速度等因素的諧波齒輪柔輪?剛輪輪齒嚙合區域混合潤滑模型;探討不同參數下柔輪與修形后的剛輪對潤滑性能的影響,對于提高諧波減速器性能具有十分重要的工程意義。
1 雙圓弧諧波齒輪傳動原理
1.1 柔輪齒廓模型
本文中的諧波齒輪使用公切線式雙圓弧齒廓基本齒形主要由圓弧與直線段構成;如圖1所示。其中:a為齒頂高;f為齒根高;為全齒高;a為凸圓弧齒廓半徑;f為凹圓弧齒廓半徑;l為公切線縱向長度;為公切線傾角;為齒根圓與中性層距離;a為凸齒圓心移距量;a為凸齒圓心偏移量;f為凹齒圓心移距量;f為凹齒圓心偏移量。
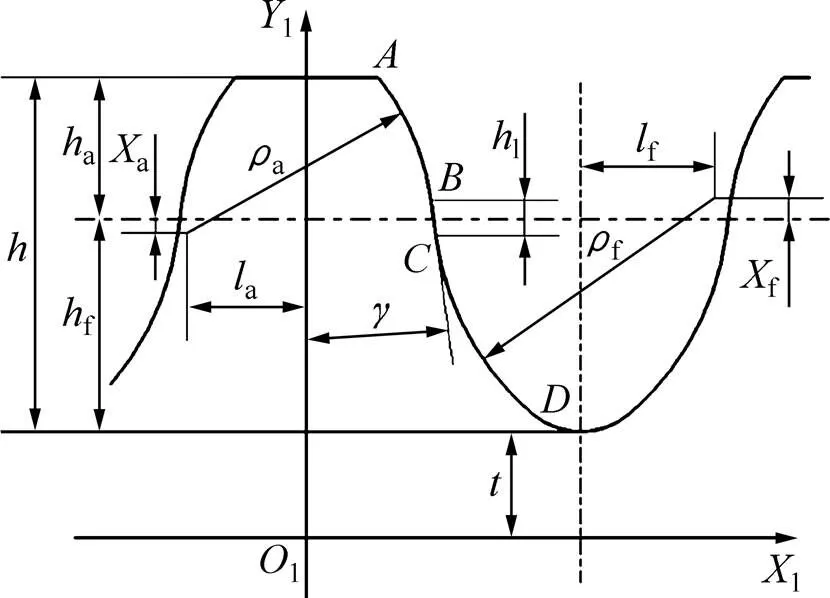
圖1 雙圓弧齒的齒形結構
根據圖1中齒廓的分段特征,其曲線方程的坐標形式如下。
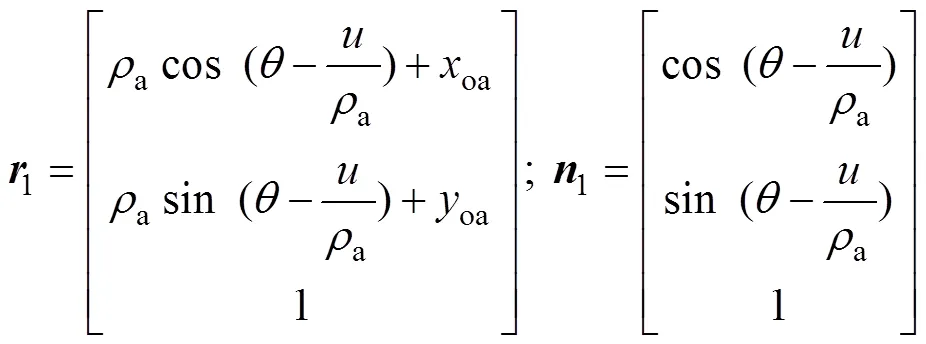
段為凸圓弧齒廓:
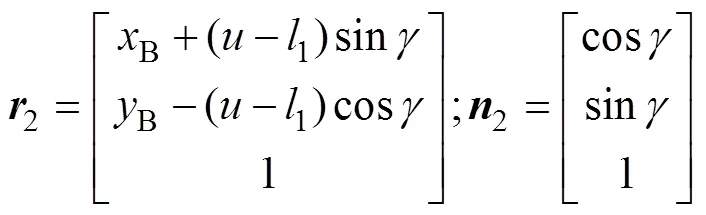
段為一條直線:
段為凹圓弧齒廓:
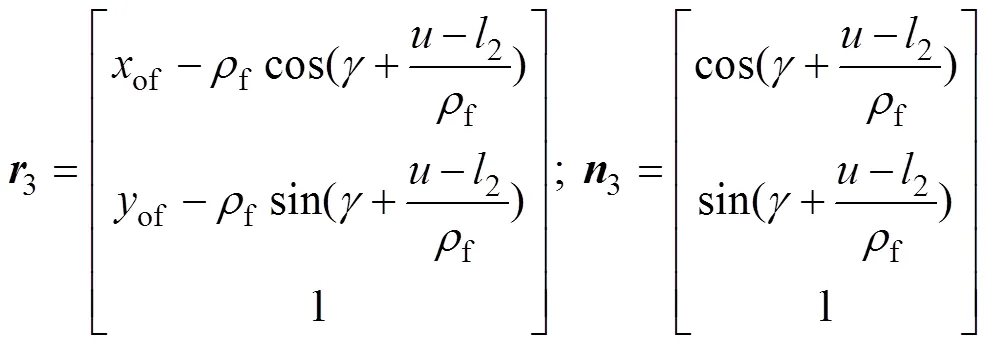
式(1)為齒頂圓弧段的曲線方程,式(2)為連接齒頂和齒根圓弧的直線段的曲線方程,式(3)為齒根圓弧段的曲線方程。本文中雙圓弧齒廓的基本參數是根據公切線雙圓弧標準ГОСТ15023-69確定的。本文中諧波柔輪模數為0.396 mm,根據齒廓齒形結構圖可以看出,諧波的齒形參數可以由以下6個參數確定:凸圓弧圓心坐標、凹圓弧圓心坐標、凸圓弧半徑a、凹圓弧半徑f、公切線縱向長度和公切線 傾角。
1.2 共軛坐標系及r矩陣的建立
柔輪與剛輪的相對運動可以由圖2所示的坐標系求出。
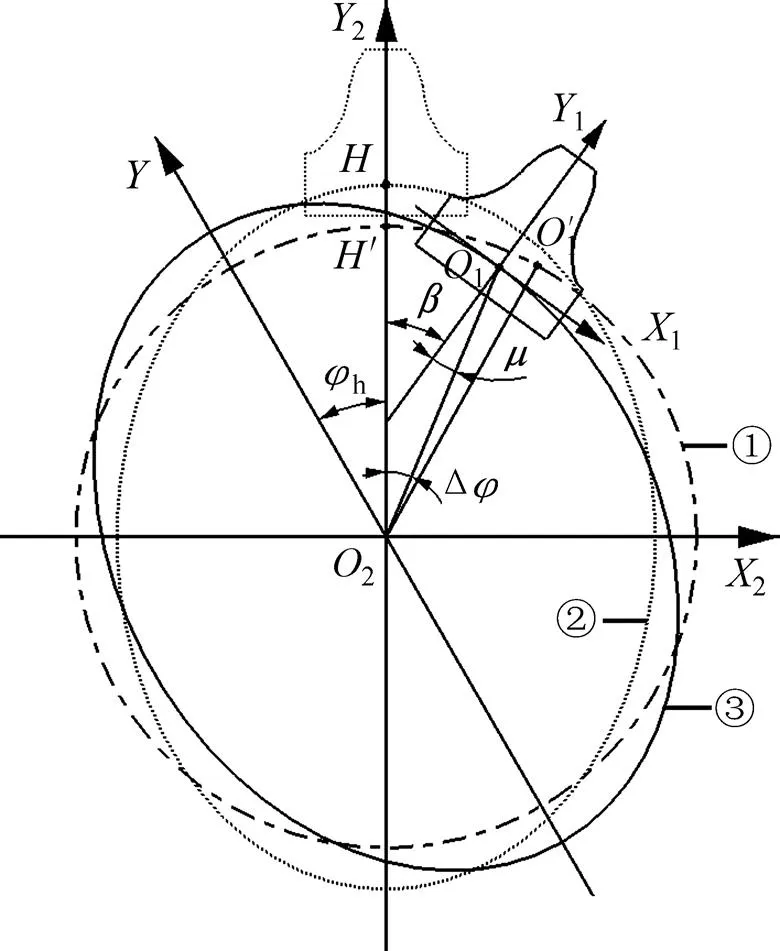
圖2 諧波齒輪傳動坐標系[6]
根據相對運動可以假定剛輪不動,波發生器旋轉從而帶動柔輪轉動。該坐標系分為1個全局坐標系與1個局部坐標系,其中坐標系2為與剛輪固連,靜止不動,1與柔輪輪齒固連,隨波發生器轉動。根據諧波齒輪傳動的運動關系[8]有
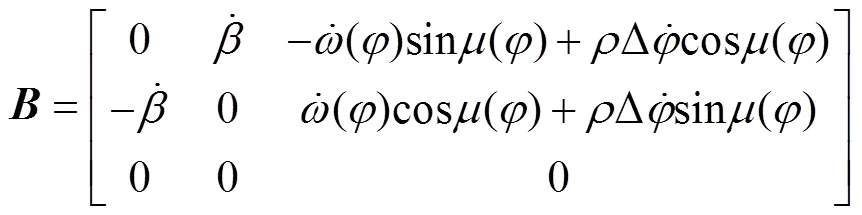
基于改進的運動學法[9]可以建立嚙合不變矩陣:
利用矩陣的嚙合不變特性,對諧波柔輪齒廓的3段齒廓建立統一的嚙合基本方程組[10]。
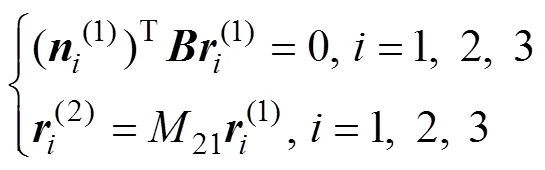
以柔輪齒廓參數作為已知變量可以求出共軛齒廓參數,選用橢圓凸輪波發生器,表1所示為初始柔輪齒廓參數。

表1 柔輪齒廓參數
圖3和圖4所示分別為柔輪齒廓共軛區域共軛嚙合角度,柔輪齒廓各段的理論共軛齒廓。
圖4和圖5中,線段和為柔輪段理論共軛曲線,和為柔輪段理論共軛曲線,和為段理論共軛曲線。可以看出若剛輪的齒形中包含共軛齒廓,和,當波發生器帶動柔輪轉動時,柔輪理論上會與齒廓嚙合,從而發生干涉。因此,實際發生共軛的區域為,和3處。根據楊勇等[6]提出的齒廓控制優化算法,調整柔輪參數,使得和2處共軛齒廓差異最小化,使柔輪與剛輪的1次嚙合中,柔輪的凸齒廓與剛輪的凹齒廓、柔輪的凹齒廓與剛輪的凸齒廓同時發生共軛(雙共軛)。
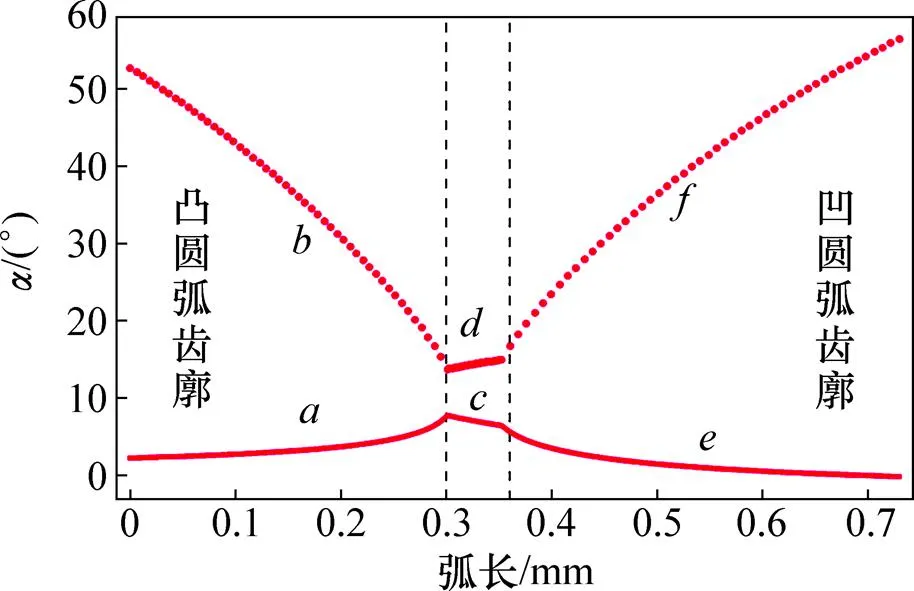
圖3 柔輪共軛嚙合角度
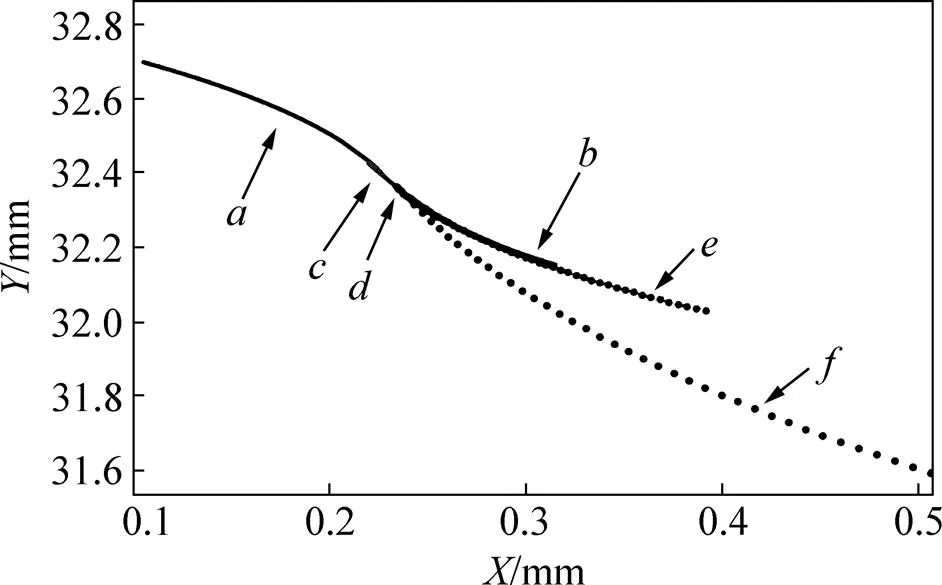
圖4 柔輪齒廓理論共軛齒廓
2 混合潤滑模型
諧波齒輪傳動裝置中柔輪與剛輪為有限長線接觸[11?12]。由于柔輪與剛輪的嚙合具有周期性,雖然同一時刻不同嚙合點的相對速度與潤滑情況不同,但是在整個齒圈上,所有齒對的運動性質是不斷重復的。因此,對柔輪的潤滑分析可以簡化為對其中某一齒對的嚙合情況進行分析。柔輪弧長與剛輪共軛齒廓嚙合可以簡化為2個圓弧面接觸。簡化模型如圖5所示。圖中:1為柔輪嚙合點曲率半徑;2為剛輪嚙合點曲率半徑;為赫茲接觸半寬;為接觸長度。
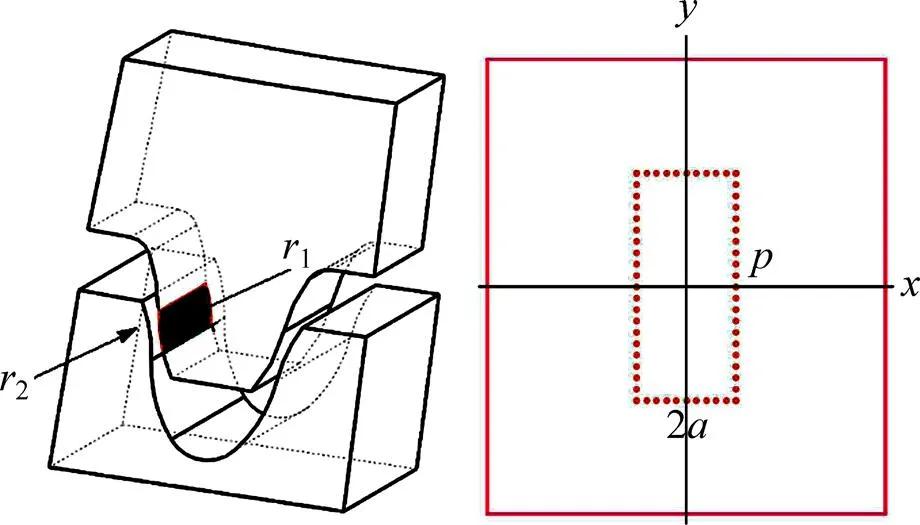
圖5 柔輪?剛輪接觸幾何模型
赫茲接觸區域的載荷根據文獻[13?14]建立參與齒數嚙合滿足的變形協調方程及傳遞力矩平衡方程計算得出。齒面上切向力與徑向力的計算公式如下:
式中:為輸出扭矩;g為分度圓直徑;2為40°;1為嚙合點相對于波發生器長軸的角度位置。
2.1 基本方程組
假設柔輪相對剛輪切線運動方向為方向,切線所在平面為{,,}坐標系,建立混合潤滑方程組[15]。
Reynolds方程為

考慮真實表面粗糙度的油膜厚度方程為

式中:1和2分別為兩接觸體赫茲接觸區域真實表面粗糙度;e(,,)為表面彈性變形。

潤滑油的黏度為
潤滑油的密度方程為
系統平衡方程為
2.2 接觸區域運動學關系
圖6所示為柔輪?剛輪接觸區域嚙合點的速度示意圖。圖6中,為輸入端角速度;ek為柔輪嚙合點牽引速度;rk為柔輪嚙合點徑向變形速度;tk為柔輪嚙合點切向變形速度。
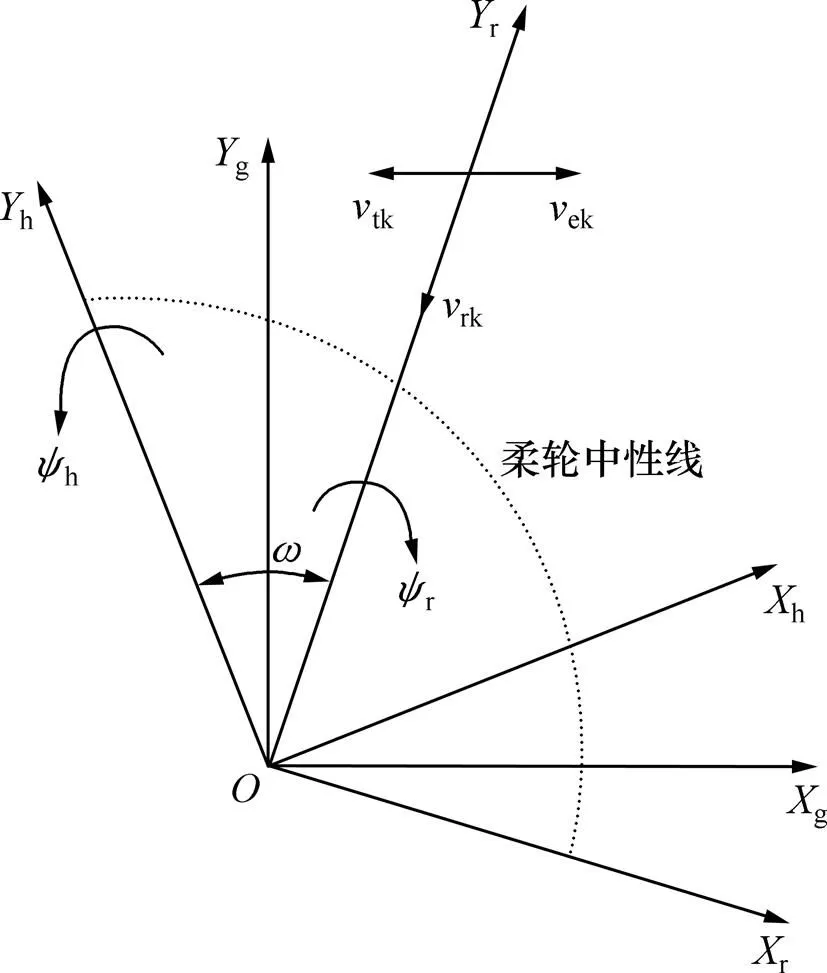
圖6 柔輪?剛輪嚙合示意圖
在輸入轉速一定的情況下,赫茲接觸區域的相對運動速度為ekrk+tk。計算潤滑時,使用的相對滑滾速度即為該相對運動速度沿著齒廓方向的切向 分量。
通過柔輪齒廓參數計算得到剛輪的齒廓的離散點。通過擬合的方法[16]求出剛輪凸齒廓近似半徑1與凹齒廓近似半徑2。
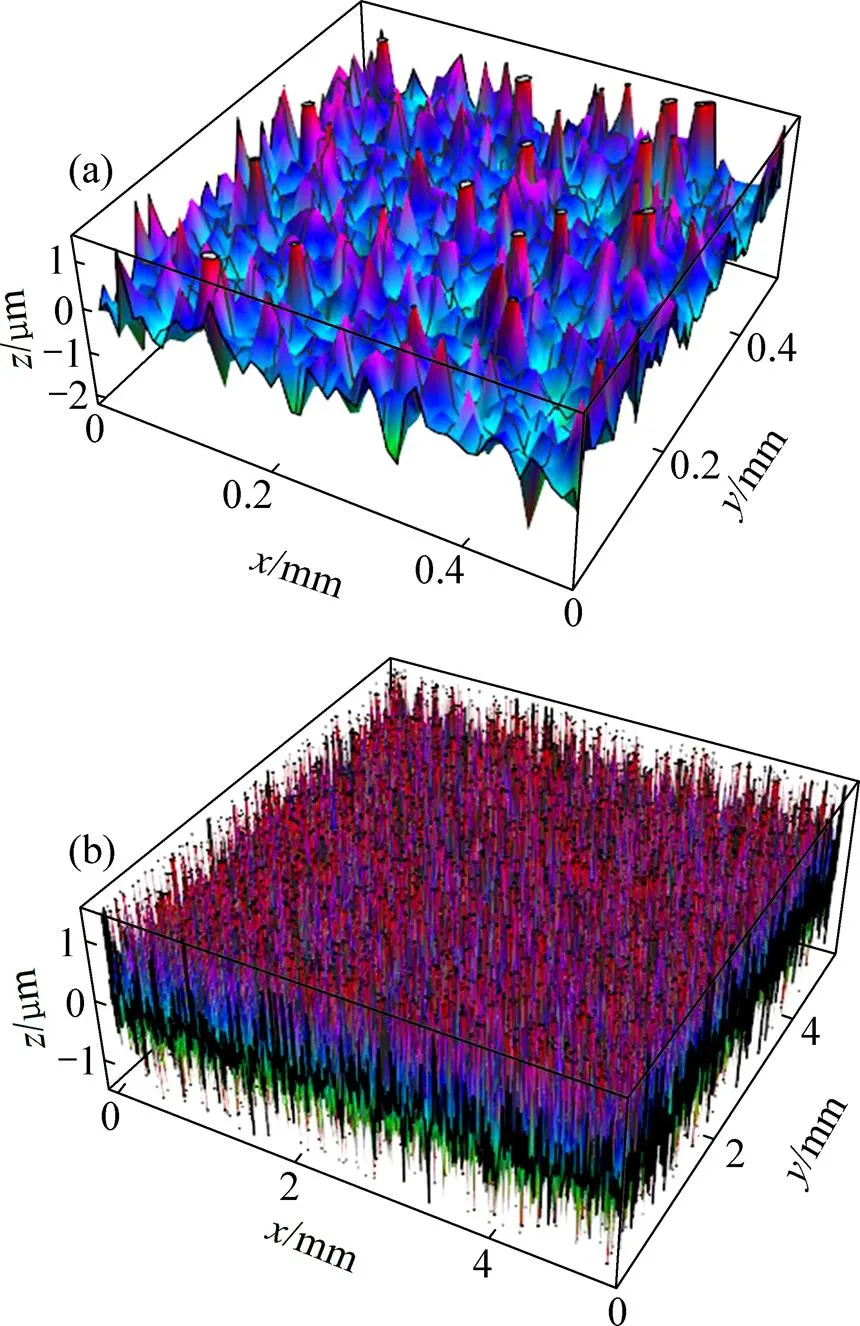
(a) 局部形貌;(b) 接觸區形貌
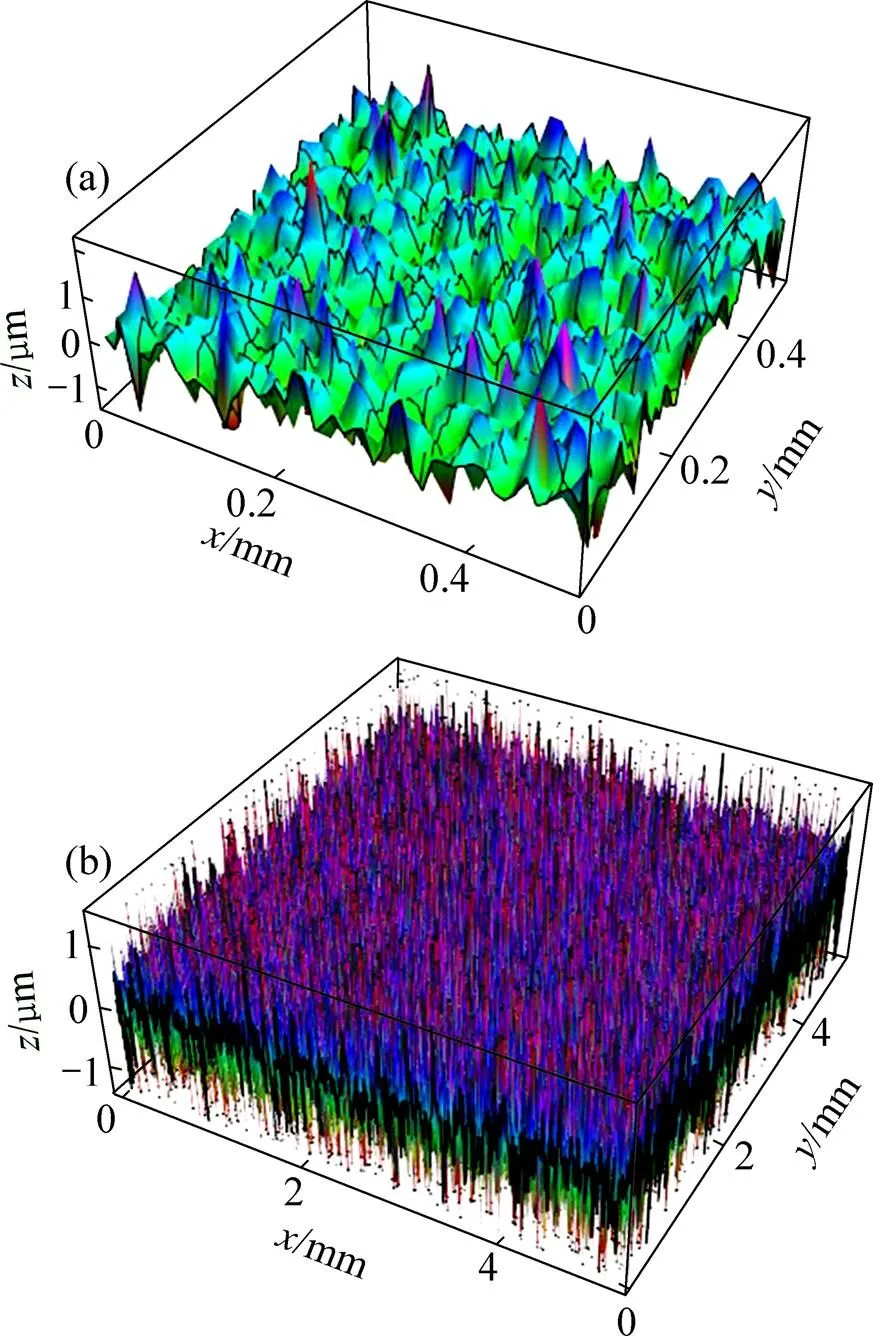
(a) 局部形貌;(b) 接觸區形貌
柔輪傳動過程中存在2次共軛現象。
第1次共軛:柔輪齒頂與剛輪凸齒廓接觸。
1a,21
第2次共軛:柔輪齒頂與剛輪凹齒廓接觸。
1a,22
2.3 接觸區域真實形貌模型
為了建立考慮表面粗糙度的油膜厚度方程需要先建立真實表面粗糙度模型。
傳統的粗糙度模型通常使用計算機仿真的方式建模。如張生光等[17]基于快速傅里葉變換模擬生成三維非高斯粗糙表面。本文利用光學輪廓儀測得同種型號諧波減速器柔輪與剛輪表面真實形貌,獲取離散的坐標點。光學輪廓儀視野區域為5.12 mm×5.12 mm。其中柔輪表面均方根粗糙度為0.353 5 μm,剛輪表面均方根粗糙度為0.362 7 μm。
2.4 數值計算
根據式(1)~(5)計算并選取合適的剛輪齒廓,在Mathematica中擬合出剛輪近似齒廓的曲率半徑1和2。將彈性變形方程、潤滑油的黏度壓力方程、潤滑油的密度壓力方程與Reynold方程合并為1個方程組,并且使用復合迭代法求解[18],為了求解的效率[19?20],使用快速傅里葉算法計算接觸區域表面的彈性變形,采用Gauss?Siedel迭代方法重復計算壓力分布,膜厚和彈性變形直至滿足壓力與載荷的收斂精度。為保證結果的準確性,采用收斂精度為1×10?5。

3 結果分析與討論
3.1 基本輸入參數
根據建立的混合潤滑模型,對不同齒廓參數的齒廓嚙合進行仿真分析。減速器基本參數如下:額定輸入轉速為3 000 r/min,額定輸出轉矩=90 N?m,齒寬為9 mm。材料屬性如表2所示。
潤滑劑的基本參數如下:初始黏度為0.093 Pa?s,黏壓系數為1.82 GPa?1。
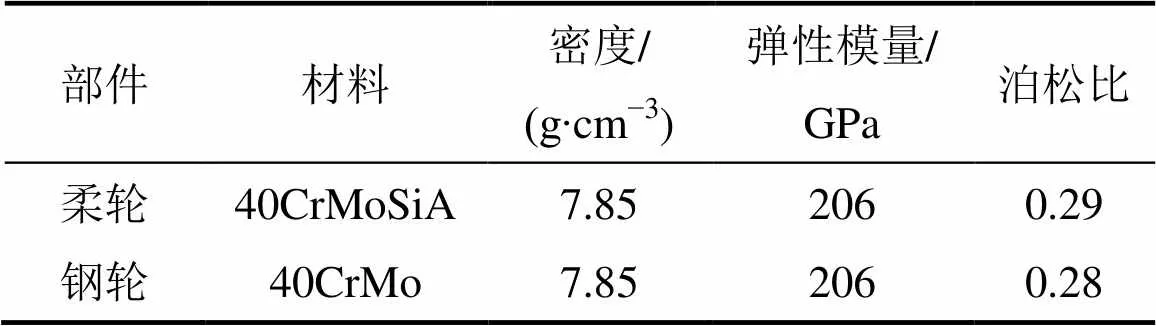
表2 接觸模型材料參數
由于制造加工等問題,柔輪齒廓的凸圓弧齒廓半徑通常小于凹齒廓圓弧半徑。表3所示為保持柔輪凹圓弧齒廓半徑不變,調整凸圓弧齒廓參數,公切線角度和長度參數使共軛齒廓與重合,得到的共軛齒廓曲率半徑。表3中1為剛輪凸齒廓擬合半徑,2為凹齒廓擬合半徑。

表3 接觸區域曲率半徑
3.2 不同曲率齒廓對潤滑的分析
由于在實際的工程應用中,減速器的工作轉速通常與額定轉速不同,對不同輸入轉速下的齒廓接觸區膜厚比、接觸載荷比以及摩擦因數進行分析具有十分重要的意義。
3.2.1 不同轉速下曲率半徑對膜厚比的影響
定義柔輪凸齒廓?剛輪凸齒廓第1次共軛接觸區為a、柔輪凸齒廓?剛輪凹齒廓第2次共軛接觸區為b。圖9和圖10所示分別為a和b接觸區膜厚比隨著波發生器輸入轉速變化的曲線。由圖9和圖10可以看出膜厚比均隨著波發生器輸入轉速的增加不斷增大。
從圖9和圖10還可以看出:在低速區,潤滑效果較差,齒廓參數對潤滑的效果影響較小,增大凸齒廓半徑能輕微改善接觸區潤滑情況。波發生器輸入轉速為200 r/min時,凸齒廓半徑由0.5 mm增加到0.7 mm,接觸區a的膜厚比由0.011增加到0.025,雖然有明顯增加,但是數值依然偏低,此時主要以干接觸為主,轉速對于潤滑效果的影響最大。在高轉速下,大尺寸的柔輪凸齒廓能有效增大接觸區域膜厚比。在額定 3 000 r/min的轉速下,柔輪凸齒廓設計半徑為0.7 mm比0.5 mm時能提高“凸?凸”接觸時的膜厚比0.06,提高“凸?凹”接觸的膜厚比0.052。但是隨著a增大,潤滑改善的效果也會隨之降低,雖然0.7 mm相對于0.5 mm時能有效增加接觸區域的膜厚比,但增加的趨勢在變緩。轉速為1 200 r/min時,a由0.7 mm增加到0.8 mm,“凸?凸”接觸時的膜厚比有較小增加(約0.03),但是當轉速增加到2 000 r/min以上時3號與4號的膜厚比幾乎相同。
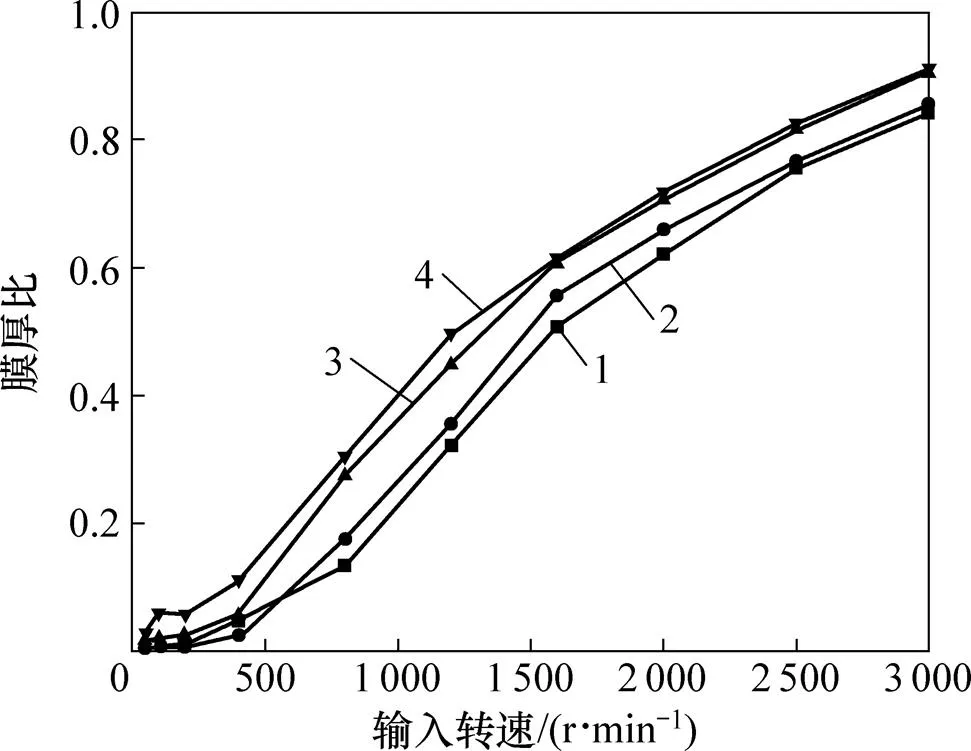
1—1號;2—2號;3—3號;4—4號。
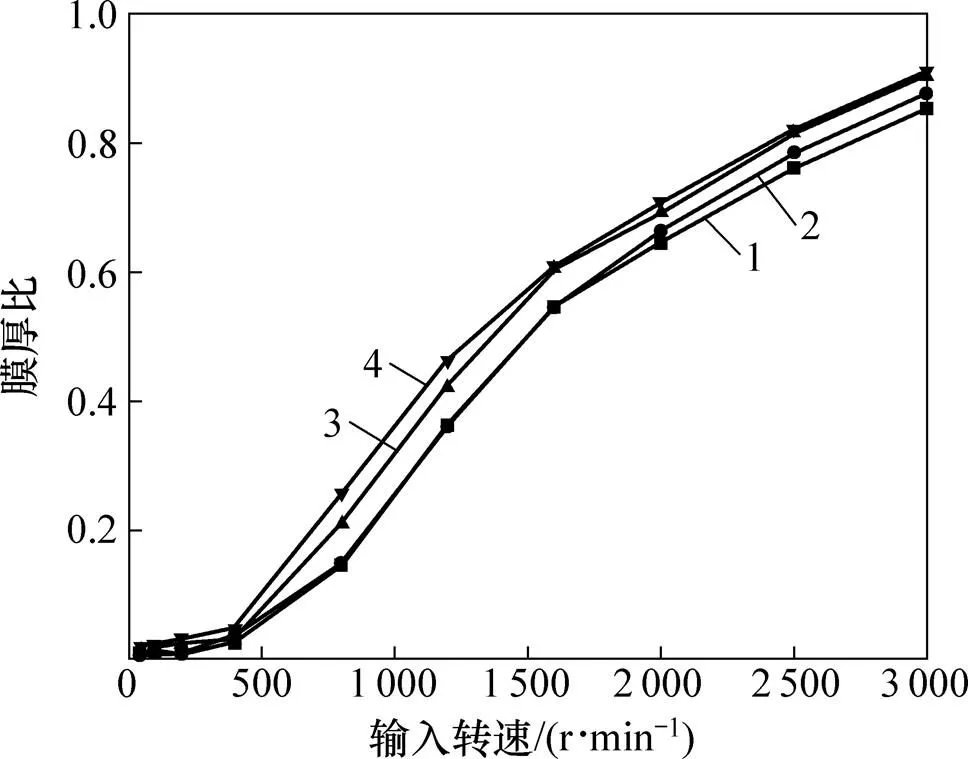
1—1號;2—2號;3—3號;4—4號。
3.2.2 不同轉速下曲率半徑對接觸載荷比的影響
圖11和圖12所示分別為柔輪凸齒廓?剛輪凸齒廓、柔輪凸齒廓?剛輪凹齒廓接觸區域接觸載荷比隨著波發生器輸入轉速變化的曲線。由圖11和圖12可以看出:2個接觸區域均具有相似的曲線:接觸載荷比均隨著轉速的增加而減小。在接觸區a中,增大柔輪凸齒廓半徑可以有效減少同轉速下接觸區的接觸載荷比:接觸區域a中,在1 600 r/min轉速下,凸圓弧齒廓半徑由0.5 mm增加到0.7 mm,接觸載荷比由10.94%減少到6.68%;由0.7 mm增加到0.8 mm時,接觸載荷比由6.68%降低到6.03%。在3 000 r/min時,凸齒廓半徑為0.7 mm與0.5 mm時的接觸載荷比相差較小(0.8%)。說明隨著凸齒廓曲率半徑的增加,接觸區的接觸載荷比在降低但降低趨勢在變緩。在轉速為200~2 000 r/min之間,增大凸齒廓半徑對于改善接觸載荷比有明顯的效果。
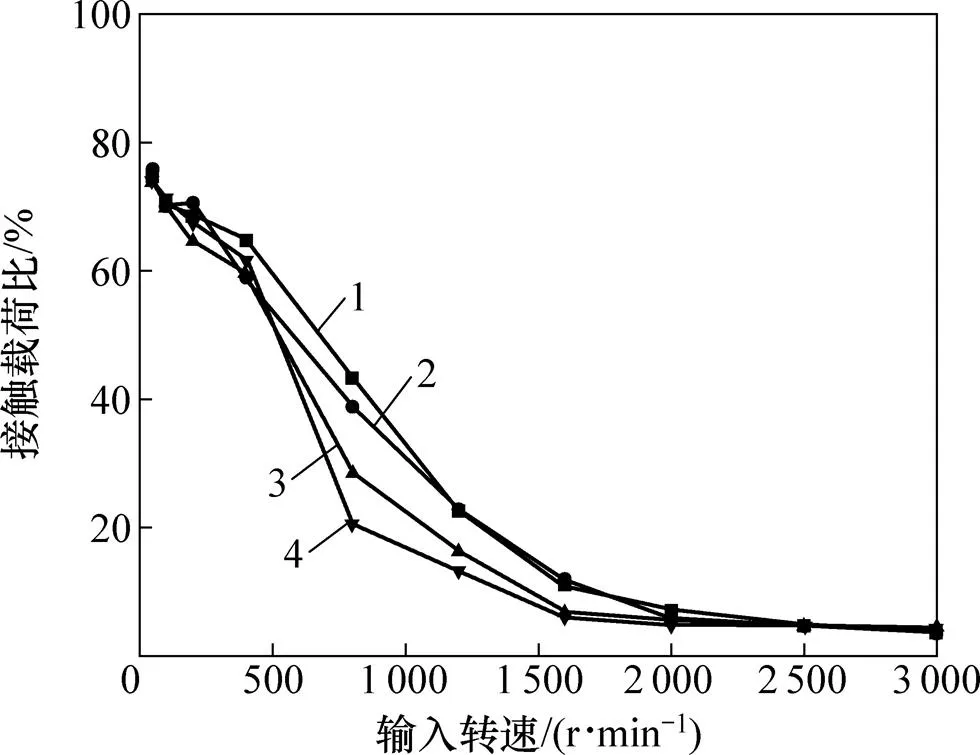
1—1號;2—2號;3—3號;4—4號。
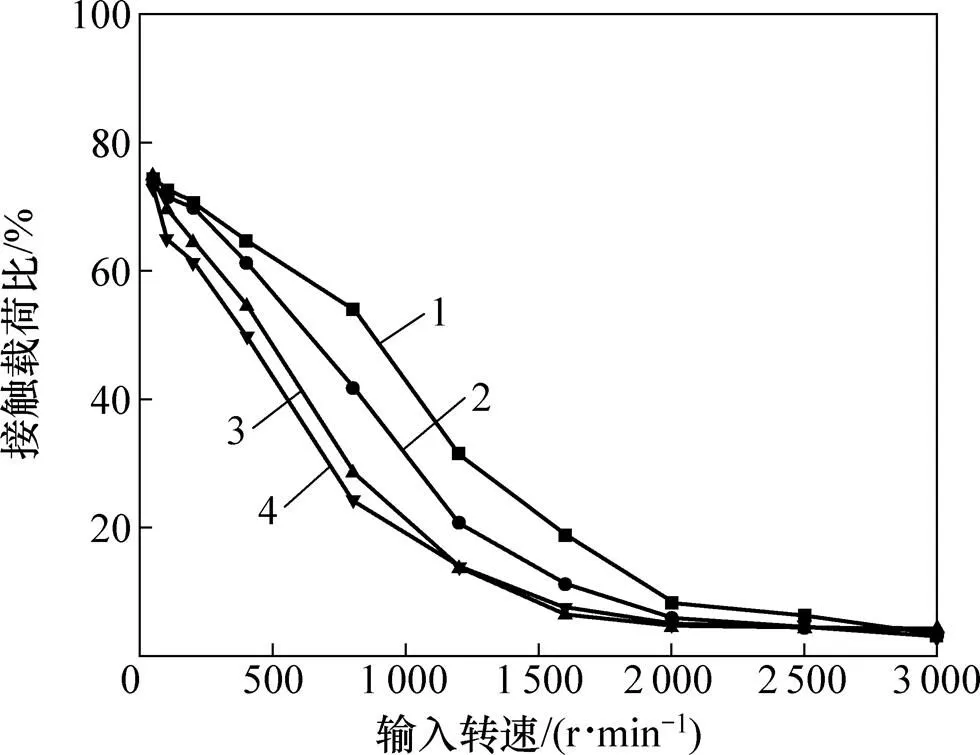
1—1號;2—2號;3—3號;4—4號。
3.2.3 不同轉速下曲率半徑對摩擦系數的影響
圖13和圖14所示分別為柔輪凸齒廓?剛輪凸齒廓、柔輪凸齒廓?剛輪凹齒廓接觸區域摩擦因數隨著波發生器輸入轉速變化的曲線。從圖13和圖14可以看出:摩擦因數隨著轉速的增加呈現出減小的趨勢,其中在500 r/min以內,隨著轉速的增加,摩擦因數迅速減小。當轉速增加到1 000 r/min以上時,隨著轉速增加,摩擦因數減小的趨勢變緩。4組數據在2 500 r/min以上轉速的摩擦因數幾乎相同。在波發生器輸入轉速為800~2 000 r/min時,兩圖中的4組數據在空間上幾乎呈現出由上到下1—2—3—4號排列,說明在此轉速區間,提高柔輪凸齒廓半徑可以有效減少接觸區a和b的摩擦因數。
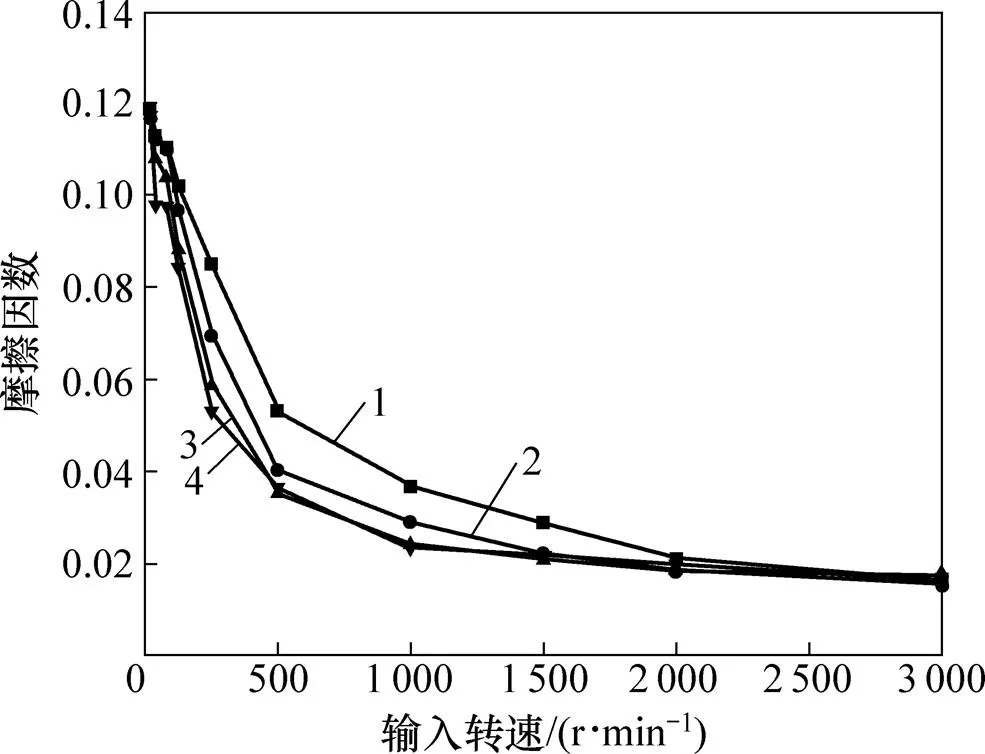
1—1號;2—2號;3—3號;4—4號。
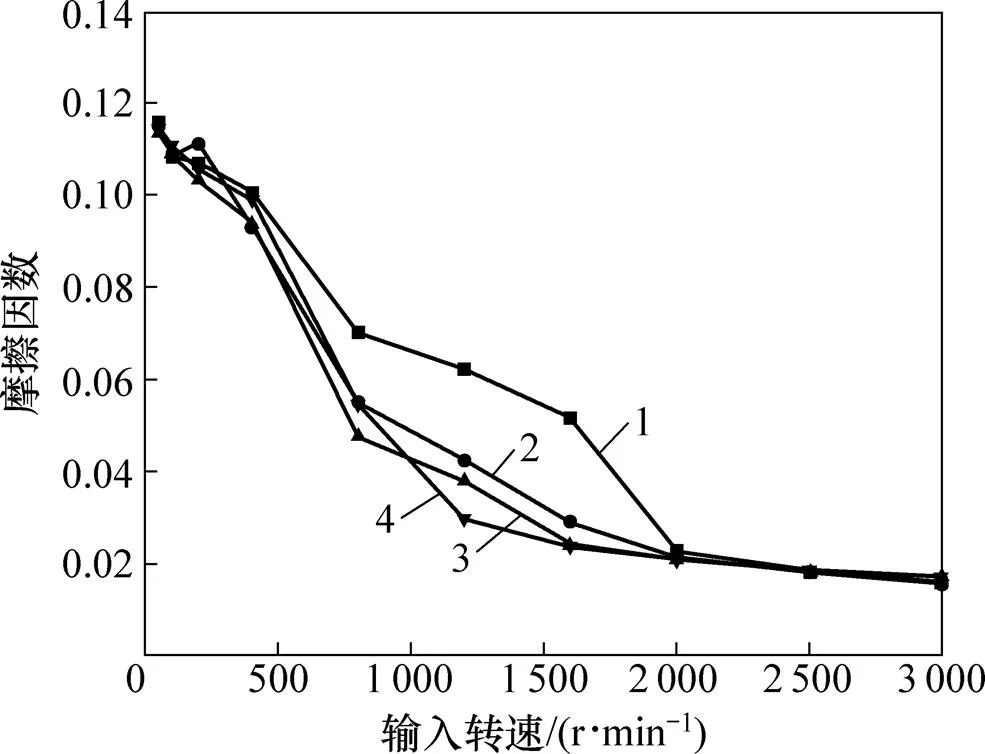
1—1號;2—2號;3—3號;4—4號。
4 結論
1) 把柔輪與剛輪的嚙合主要分為2個區域,“凸?凸”接觸與“凸?凹”接觸。隨著波發生器輸入轉速的增加,各個嚙合點的平均油膜厚度不斷增加,改變齒廓參數對中高速下的潤滑狀態有較大的影響。
2) 在中高速同一工況下,保持柔輪凹齒廓參數不變,增大凸齒廓半徑,2個接觸區域潤滑效果可以得到明顯提高。隨著柔輪凸齒廓半徑與柔輪凹齒廓半徑的接近,改善效果逐漸降低。且改善的效果在中轉速下最明顯。
3) 在低速同一工況下,潤滑條件較差,此時速度對潤滑效果的影響較大。增加波發生器輸入轉速,齒廓間潤滑效果可以得到明顯提升;保持柔輪凹齒廓參數不變,增大凸齒廓半徑可以輕微改善潤滑狀態。
[1] ISHIKAWA S. Tooth profile of spline of strain wave gearing: US, US 4823638 A[P]. 1989?04?25.
[2] ISHIKAWA S. Tertiary negative-deviation flexing contact type gear drive of non-profile-shifted tooth profile: US, US5485766[P]. 1996?10?17.
[3] 辛洪兵.雙圓弧諧波齒輪傳動基本齒廓設計[J]. 中國機械工程, 2011, 22(6): 656?662. XIN Hongbing. The design of the basic tooth profile of double arc harmonic gear drive[J]. Chinese Mechanical Engineering, 2011, 22(6): 656?662.
[4] 張有忱, 溫詩鑄. 雙圓弧齒輪彈流潤滑研究[J]. 機械設計, 1992, 9(6): 39?43. ZHANG Youchen, WEN Shizhu. Double circular arc gear elastohydrodynamic lubrication of double arc gears[J]. Mechanical Design, 1992, 9(6): 39?43.
[5] ZHU Dong, WANG Jiaxu, REN Ning, et al. Mixed elastohydrodynamic lubrication in finite roller contacts involving realistic geometry and surface roughness[J]. Journal of Tribology, 2012, 134(1): 011504.
[6] 楊勇, 王家序, 周青華, 等. 雙圓弧諧波齒輪傳動柔輪齒廓參數的優化設計[J]. 四川大學學報(工程科學版), 2016, 48(1): 186?193. YANG Yong, WANG Jiaxu, ZHOU Qinghua, et al. Optimum design of flexible gear profile parameters of double arc harmonic drive[J]. Journal of Sichuan University (Engineering Science), 2016, 48(1): 186?193.
[7] 吳繼強, 王家序, 蒲偉, 等. 齒廓形狀對諧波齒輪共軛嚙合區潤滑性的影響[J]. 華中科技大學學報(自然科學版), 2017, 45(4): 29?33. WU Jiqiang, WANG Jiaxu, PU Wei, et al. Influence of profile shape on Lubricity of harmonic gear meshing[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2017, 45(4): 29?33.
[8] FOL?GA P, GRZEGORZ WOJNAR, RAFAL BURDZIK, et al. 1401. Dynamic model of a harmonic drive in a toothed gear transmission system[J]. Journal of Vibroengineering, 2014, 16(6): 3096?3104.
[9] 沈允文.諧波齒輪傳動的理論和設計[M]. 北京: 機械工業出版社, 1985: 51?56. SHEN Yunwen. Theory and design of harmonic gear drive[M]. Beijing: Mechanical Industry Press, 1985: 51?56.
[10] 曾世強, 楊家軍, 王宣福. 雙圓弧齒形諧波齒輪傳動的運動特性分析[J]. 華中科技大學學報(自然科學版), 2000, 28(1): 12?14. ZENG Shiqiang, YANG Jiajun, WANG Xuanfu. Analysis of kinematic characteristics of double arc gear harmonic drive[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2000, 28(1): 12?14.
[11] 蒲偉, 王家序, 李俊陽, 等. 齒向修形對濾波減速器潤滑性能的影響分析[J]. 摩擦學學報, 2014, 34(4): 393?399. PU Wei, WANG Jiaxu, LI Junyang, et al. Analysis of the influence of tooth alignment on the lubrication performance of a filter reducer[J]. Journal of Tribology, 2014, 34(4): 393?399.
[12] HARRIS T A, KOTZALAS M N. Essential concepts of bearing technology[M]. 5th ed. Boca Raton: Crc Press, 2006: 55?59.
[13] 鄒創, 陶濤, 梅雪松, 等. 機器人關節短筒諧波減速器接觸計算與分析[J]. 西安交通大學學報, 2013, 47(5): 82?87. ZOU Chuang, TAO Tao, MEI Xuesong, et al. Contact calculation and analysis of harmonic reducer for robot joint[J]. Journal of Xi’an Jiaotong University, 2013, 47(5): 82?87.
[14] 胡贇, 劉少軍, 丁晟. 彈流潤滑效應下直齒輪的接觸疲勞壽命[J]. 中南大學學報(自然科學版), 2014, 45(12): 4187?4193. HU Jie, LIU Shaojun, DING Sheng. Contact fatigue life of spur gear under elastohydrodynamic lubrication[J]. Journal of Central South University(Science and Technology), 2014, 45(12): 4187?4193.
[15] HU Yuanzhong, ZHU Dong. A full numerical solution to the mixed lubrication in point contacts[J]. Journal of Tribology, 2000, 122(1): 1?9.
[16] 陳明晶, 方源敏, 陳杰. 最小二乘法和迭代法圓曲線擬合[J]. 測繪科學, 2016, 41(1): 194?197. CHEN Mingjing, FANG Yuanmin, CHEN Jie. The least squares method and iterative method of circular curve fitting[J]. science of Surveying and mapping, 2016, 41(1): 194?197.
[17] 張生光, 王文中. 基于快速傅里葉變換的三維非高斯粗糙表面數值仿真[J]. 中國科技論文, 2014, 9(8): 908?910. ZHANG Shengguang, WANG Wenzhong. Numerical simulation of 3D non Gauss rough surface based on fast Fourier transform[J]. Chinese Science and Technology Paper, 2014, 9(8): 908?910.
[18] AI Xiaolan. Numerical analyses of elastohydrodynamically lubricated line and point contacts with rough surfaces by using semi-system and multigrid methods (volumes 1 and 2)[M]. Evanston: Northwestern University, 1993: 22?47.
[19] LIU Shuangbiao, WANG Qian. Studying contact stress fields caused by surface tractions with a discrete convolution and fast Fourier transform algorithm[J]. Journal of Tribology, 2002, 124(1): 36?45.
[20] WANG W Z, WANG H, LIU Y C, et al. A comparative study of the methods for calculation of surface elastic deformation[J]. Journal of Engineering Tribology, 2003, 217(2): 145?154.
(編輯 楊幼平)
Influence of convex tooth radius of flexspline on tribology of double circular arc harmonic gear transmission
PEI Xin1, ZHOU Guangwu1, WANG Jiaxu1, 2, YANG Yong1, ZHANG Zhenhua1, HU Rukang1
(1. School of Aeronautics and Astronautics, Sichuan University, Chengdu 610065, China; 2. State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400044, China)
By using the meshing invariant matrix to establish the parameter equation and theoretical meshing equation, the theoretical conjugate meshing region and the circular-spine-tooth profile parameters could be worked out based on improved kinematics. Taking into account the real surface roughness, load, geometric contact teeth, the suction speed, a mixed lubrication mathematical model of flex-spline and soft-spline in meshing area of double circular arc tooth profile harmonic reducer was established. The influence of different tooth profile parameters on the lubrication performance of the harmonic transmission was analyzed. The results show that in the design of soft-spline tooth profile, reasonable increase of the radius of convex arc tooth profile is conducive to the improvement of the contact area lubrication state. Under constant conditions, especially high-speed conditions, increasing the radius of the convex circular arc tooth profile can the film thickness of the contact zone and increase the film thickness ratio, and the improvement effect increases with the increase of the rotational speed. However, when the radius of the convex tooth is increased to be very close to the radius of the crown, the continued increase does not improve the lubrication conditions.
double arc tooth profile; tooth profile parameters; lubrication; optimization
10.11817/j.issn.1672?7207.2018.10.012
TH132.43
A
1672?7207(2018)10?2454?08
2017?10?08;
2017?12?02
國家高技術研究發展計劃(863計劃)項目(2015AA043001)(Project(2015AA043001) supported by the National High-tech Research and Development Program (863 Program) of China)
周廣武,博士,副教授,從事機械傳動研究;E-mail:gwzhou@scu.edu.cn
