基于電機繞組能量自消耗的泵升電壓抑制研究
2018-11-16 07:53:18黃天太
新型工業化 2018年9期
黃天太
(南京康尼電子科技有限公司,江蘇 南京 210009)
0 引言
電機廣泛應用于各種機電設備中,尤其是無刷直流電機、永磁同步電機、三相異步電機等,目前普遍采用脈寬調制(PWM)技術,通過功率開關管組成的逆變電路實現控制[1-4]。電機在實際工作中往往處于不同的工作狀態,如加速、減速、快速制動、恒速度或恒力矩運行,甚至處于釋放狀態下被外力帶動高速旋轉,其中快速制動或被外力拖動的工況會導致電機處于發電狀態,此時,其繞組產生再生能量,該能量通過逆變器中的功率開關管內部的體二極管(或外部并聯的二極管)傳輸至直流母線,流經直流母線的儲能電容后返回繞組,形成回路,此過程會導致直流母線電壓升高,即形成泵升電壓[5-8]。由于電機驅動器逆變電路直流母線上一般都有其他電路或器件,泵升電壓過高而得不到有效的釋放,則會導致這些電路中的器件因過壓而擊穿失效,甚至最終引起母線對地短路,因此,應該根據系統特點采取有效措施抑制泵升電壓。本文首先簡要介紹了常規的幾種泵升電壓的抑制方法及其主要特征,然后提出了一種基于電機繞組能量自消耗的泵升電壓抑制方法,并分別給出了單獨軟件和硬件實現的方案,最后對兩種實現方案進行了對比分析。
1 常規的泵升電壓抑制方法
泵升電壓的抑制過程就是系統再生能量的處理過程,對于大功率傳動系統來說,泵升電壓對應的能量較大,一般把這些電能通過整流回饋電網,即回饋制動[9-13]。而對于中小功率的傳動系統,一般有兩種方式:其一,設計泄放電路,當泵升電壓高于設定值時,將能量通過功率電阻泄放以熱量的形式消耗,即能耗制動。如果頻繁制動會產生較大的熱量,需要考慮系統的散熱設計;其二,增加母線電容容量,將泵升電壓產生的電能存儲在電容中,主要目的不是為了利用這個能量,而是通過增大電容的容量吸收再生能量,從而抑制泵升電壓上升的幅度和速度,但電容量的增加,會增加系統的體積和成本,在電容充電過程中也會增加系統的涌流[14-15]。回饋制動需要將再生能量通過整流電路和軟件控制實現,電阻消耗的方式需要大功率泄放電阻,母線電容吸收方式需要大容量的電容器,這些方式均需要額外的硬件,甚至軟件的輔助,系統復雜度和成本均有不同程度增加。
2 基于電機繞組能量自消耗的泵升電壓抑制
2.1 基于電機繞組能量自消耗的泵升電壓抑制的基本原理
針對中小功率的電機驅動系統,可以通過電機繞組能量自消耗的方式對泵升電壓進行抑制,其基本原理是:在電機產生泵升電壓時,通過恰當的控制電機驅動器逆變電路中功率開關管的狀態,使電機繞組兩端直接形成閉合回路,再生能量在電機繞組上消耗,從而避免了泵升電壓的產生,同時,繞組中的電流切割磁力線形成阻力,也達到了制動的效果。可以分別單獨從軟件和純硬件電路上實現,不需要額外的整流回饋電路、電阻泄放電路或增加母線儲能電容,特別適用于因快速制動或外力拖動電機轉動產生的泵升電壓的抑制。為簡化模型,本文以有刷直流電機為例進行分析介紹,對于無刷直流電機、永磁同步電機和異步電機等,原理和方法相同。
2.2 軟件抑制方法
直流有刷電機的控制驅動系統如圖1所示,軟件控制信號H1、H2、L1、L2經過MOSFET Driver(如IR公司的IR2136)后驅動由MOSFET Q1~Q4組成的H橋,軟件采集電機的電流和速度即可構成電流環和速度環雙閉環控制系統。正常情況下,假設電機正轉時,Q2載波,Q3持續導通,此時通過控制Q2載波的占空比即可實現對電機速度和轉矩的控制。
如果在電機正常運行過程中需要快速制動,或電機處于釋放狀態(電機處于自由狀態,Q1~Q4均處于關閉狀態)有外力拖動,此時電機會變為發電機,電機繞組產生的電流經由D2->C1->Rs->D3返回,此過程中產生的電能會通過H橋逆變電路對直流母線電容C1充電,形成泵升電壓。
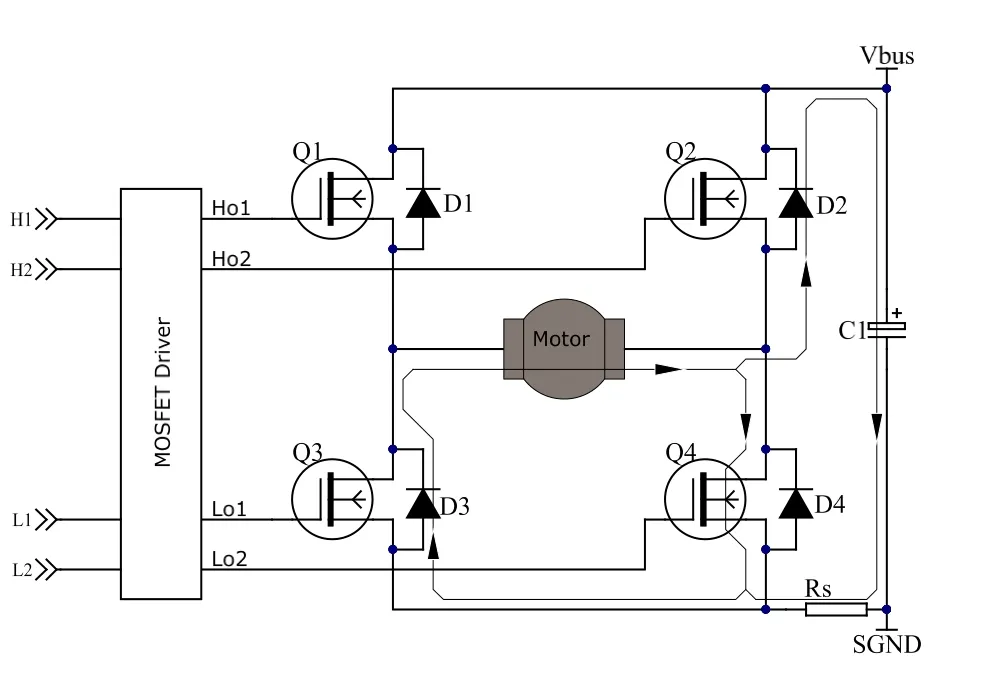
圖1 軟件控制方式抑制泵升電壓的電流回路Fig.1 Circuit loop of bumping voltage suppression by software
此種情況下,如圖2所示,可以將逆變電路H橋上管Q1、Q2配置為關閉模式,下管Q4設置載波工作模式,在Q4載波周期的導通期間,電機產生的發電電流經繞組至Q4->D3返回電機繞組,電流在繞組上消耗;在Q4載波周期的截止期間,電機繞組產生的電流經由 D2->C1->Rs->D3 返回電機繞組,向直流母線電容C1充電,因此,可將部分電機發電產生的能量消耗在電機繞上,從而達到抑制泵升電壓的目的。實際應用中,通過調節Q4的占空比,使逆變電路直線母線電壓限制在設定的上下限范圍內(上限V_upper,下限V_lower),達到良好的泵升電壓抑制效果,同時保持合適的電機制動力。
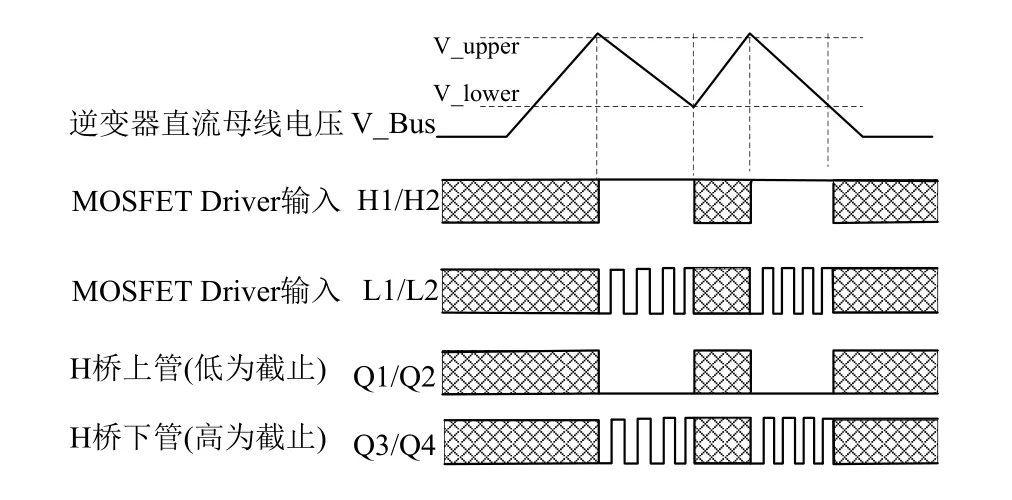
圖2 軟件控制方式抑制泵升電壓的工作時序圖Fig.2 Sequence chart of bumping voltage suppression by software
2.3 純硬件抑制方法
如圖3所示,采用純硬件的方式,利用電機繞組自身消耗電機發電產生的能量。在逆變電路H橋開關管驅動器(MOSFET Driver,如IR公司的IR2136,輸入低有效)前增加一個數據收發器(Bus Transceiver,如TI公司的SN74ACT245,由5 V電源供電,通過控制其使能信號En為低電平或高電平,可使其工作在導通狀態和高阻狀態),設置為數據從A至B,En為使能端,En為低時,數據從A->B,En為高時,輸出為高阻態。逆變電路H橋的直流母線電壓經采樣分壓后輸入滯環電壓比較器(Hysteresis Comparator),設定滯緩電壓比較器參考輸入端電壓上限為V_upper,下限為V_lower,即允許的泵升電壓上限為V_upper。
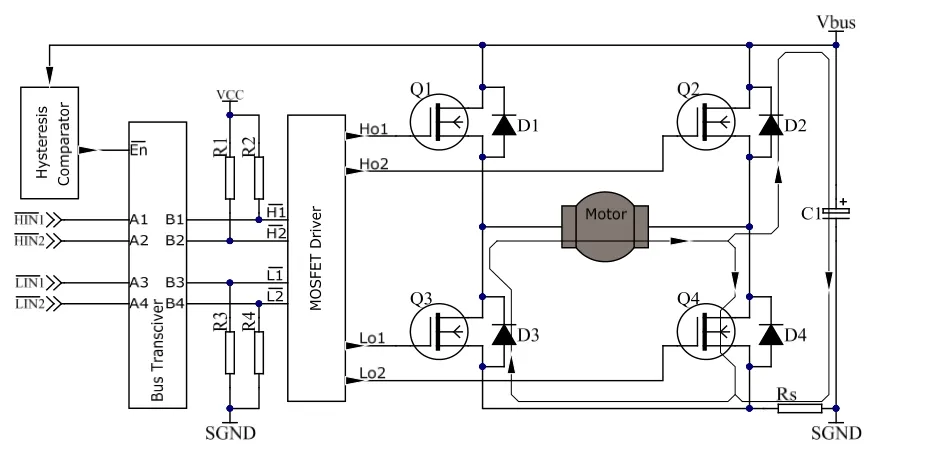
圖3 純硬件方式抑制泵升電壓的電流回路Fig.3 Circuit loop of bumping voltage suppression by hardware
工作過程如圖4所示:當有外力拖動電機發電時,電機繞組產生的電流經由D2->C1->Rs->D3返回電機繞組形成閉合回路,此過程中產生的電能會通過H橋逆變電路對直流母線電容C1充電,形成泵升電壓,直流母線V_Bus電壓上升,當其電壓上升至V_upper時,比較器反轉,輸出高電平給數據收發器的En端,數據收發器將 H1、H2、L1、L2與軟件信號 HIN1、HIN2、LIN1、LIN2斷開,H1、H2狀態由上拉電阻確定,為高電平,L1、L2狀態由下拉電阻確定,為低電平,此時,H橋逆變電路的下管Q3、Q4處于導通狀態,上管Q1、Q2處于截止狀態,電機繞組發電產生的電流將經由Q4->D3返回電機繞組形成閉合回路,再生能量消耗在電機繞組上,不再為直流母線的電容充電,因此不會產生泵升電壓,直流母線電壓隨著其他電路的緩慢消耗下降,當其下降至設定值V_lower下時,滯環電壓比較器再次發生翻轉,輸出低電平給En,恢復軟件信號HIN1、HIN2、LIN1、LIN2對H橋的控制。系統可反復在兩種模式下切換,使直流母線的電壓始終不超過設定允許值V_upper,從而達到抑制泵升電壓的效果。
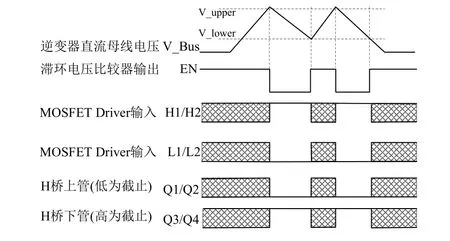
圖4 純硬件方式抑制泵升電壓的工作時序圖Fig.4 Sequence chart of bumping voltage suppression by hardware
2.4 兩種實現方式的對比分析
利用電機繞組能量自消耗的方式抑制泵升電壓的兩種方案在電路硬件上都較為簡單,軟件控制實現方案中將下管(Q4) 的工作模式調整為完全導通,則與純硬件的方案等效。硬件實現方案具備更高的可靠性,而軟件實現方案具備更高的靈活性。
系統初始化啟動軟件尚未完成配置的階段,或者運行異常甚至死機無法控制逆變電路的開關管,此時若產生泵升電壓,軟件實現方式將無法抑制,純硬件的方案通過硬件電路的檢測和控制,一旦泵升電壓超出設定值,則強行切換至繞組的能量自消耗模式,抑制泵升過高導致系統其它器件或電路失效,這種場合適合采用硬件實現方案。
在某些機電系統中,電機處于釋放狀態需要外力拖動的場合,如設備故障需要外力復位電機驅動的終端機械裝置,此時,在外力復位時會產生泵升電壓,采用純硬件的方式可能會出現阻力很大,需緩慢拖動才可復位甚至無法復位,此時如果采用軟件抑制方式,則可控性較好,可以在外力拖動電機的阻力與泵升電壓大小之間形成良好的平衡,這種場合適合采用軟件實現方案。
3 結論
基于電機繞組能量自消耗的泵升電壓抑制,可分別單獨通過軟件對逆變電路開關管的控制以及純硬件兩種方案實現,硬件電路簡單,便于實施,相較于常規的泵升電壓抑制方法在某些應用中具有良好的實用價值。