基于CATIA的施肥深松機的設計與有限元分析
2018-11-20 08:17:16姚鵬華郭永川姚智華
裝備制造技術 2018年9期
姚鵬華 ,郭永川 ,姚智華
(1.湖北文理學院汽車與交通工程學院,湖北 襄陽441053;2.純電動汽車動力系統設計與測試湖北省重點實驗室,湖北 襄陽441053;3.湖北文理學院后勤保障與資產管理部,湖北 襄陽441053;4.安徽科技學院機械工程學院,安徽 鳳陽233100)
土壤深松作業是指對正常犁耕深度的犁底層土壤進行松土作業。通過深松作業,可以增加土壤的透氣性和透水性,防止土壤板結,有利于作物生長[1]。常規的深松機一般只具有深松功能。本文設計了一種新型的深松施肥機,在深松土壤的同時,還可以對深層土壤進行施肥作業,保證作物在生長后期的肥料供應,這是一般的施肥作業難以實現的。本文首先進行了施肥深松機的整機結構設計,并對關鍵部件進行了分析,并利用CATIA軟件的數字化建模功能輔助三維設計。深松機在工作工作中,鏟頭與土壤的受力狀況較為復雜。為此采用CATIA軟件自身的有限元分析模塊,對深松作業關鍵部件深松鏟鏟頭進行靜力學分析,得到了鏟頭內部的應力分布和受力特性[2-6]。分析結果對改進深松鏟鏟頭結構,優化整機結構提供了理論依據。
1 整機結構及工作原理
本次設計的深松施肥機如圖1所示。該機采用三點懸掛機構與拖拉機掛接。其主要工作部件為裝在機架上的鑿形深松鏟。施肥箱布置在機架的后側,排肥器采用外槽輪式排肥器。工作時,拖拉機通過懸掛裝置牽引施肥深松機在田間工作,由于深松鏟有一定的入土角,在深松機自重作用下,鏟頭可深入土壤底層進行深松作業。地輪一方面起限深作用,另一方面地輪的轉動通過鏈傳動帶動排肥軸轉動,肥箱中的肥料通過排肥器、輸肥管和肥料管落至深松鏟底部土壤中,一次性完成深松和深層土壤施肥作業。
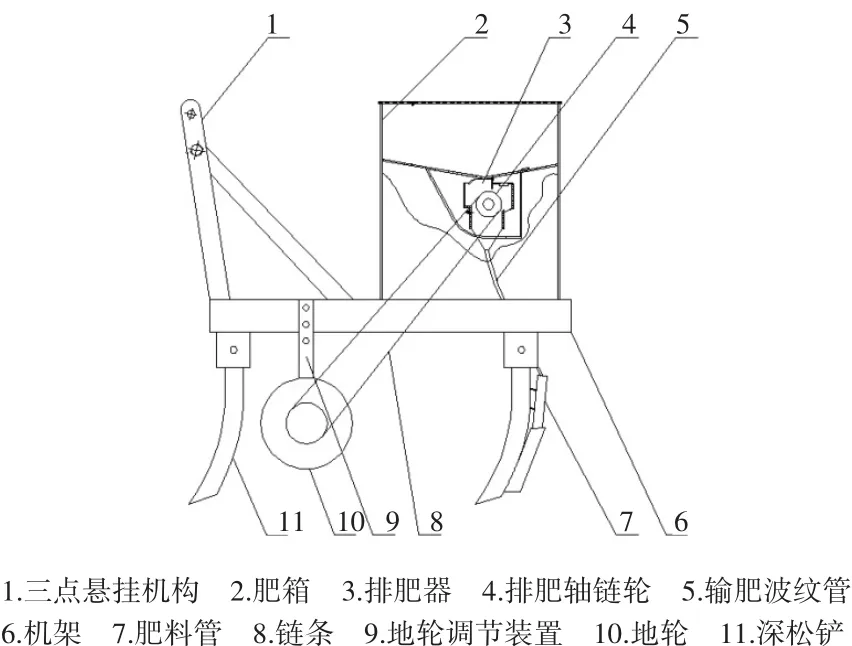
圖1 施肥深松機的整體結構
2 關鍵部件設計
2.1 機架的設計
機架采用框架結構,主要采用80 mm×80 mm的方鋼焊接而成。機架分為前后兩部分,中間有一橫梁,如圖2所示。機架前部分用于三點懸掛裝置,并與拖拉機掛接,橫梁為下拉桿作用梁。施肥箱布置在機架的后部分。深松鏟通過螺栓與機架相連。該機架剛度較好,結構簡單,容易制造。
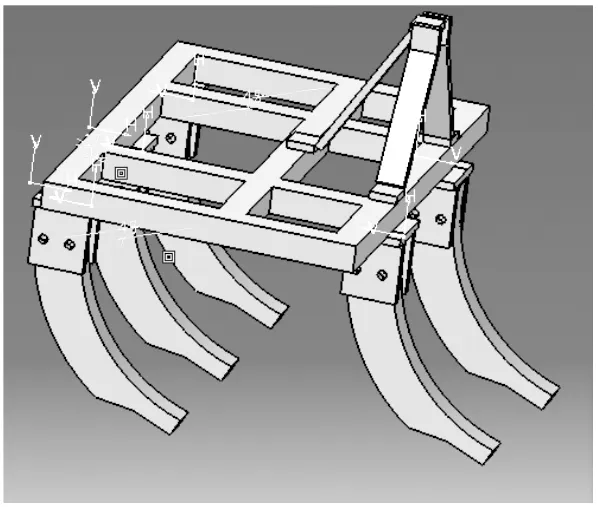
圖2 機架結構示意圖
2.2 深松鏟的設計
深松鏟是深松機的關鍵工作部件。該深松施肥機一共設置了五個深松鏟,分前后兩排并相互錯開,保證深松行間距為400 mm.深松鏟的工作深度為250-350 mm,其工作深度由地輪調節裝置控制。深松鏟分為鏟頭和鏟柄兩部分。鏟頭應具有較強的松土能力,同時應具有一定的強度、剛度和耐磨性。深松鏟的鏟頭形式有鑿型、翼型和三角型等多種形式。根據工作要求,本深松施肥機選擇鑿型鏟頭。該鏟頭強度較高,松碎土壤性能好。鏟頭的材料選擇65Mn,硬度為HRC50.鏟柄上設置有螺栓孔,通過螺栓與機架連接。鏟尖結構參數及鏟柄其他結構參數參照JB/T 9788—1999[7].
2.3 施肥部件的設計
施肥箱固定在機架的后方。排肥器采用外槽輪式排肥器,排肥軸上安裝有小鏈輪,地輪上安裝有大鏈輪。當拖拉機帶動深松施肥機前進時,地輪旋轉并通過鏈傳動帶動排肥軸轉動,使肥料通過排肥器落入塑料波紋輸肥管。
常規的施肥機需要開溝器,本次設計巧妙利用了深松鏟的開溝功能,無需施肥開溝器,使整機結構上進一步簡化。從圖1可以看出,在深松鏟背后焊接方管和圓管作為肥料管,塑料波紋肥料管套入到肥料管中。這樣肥料就可以沿著肥料管,落至深松鏟開好的溝底,實現了深層土壤施肥。
利用CATIA軟件的機械設計功能進行三維設計。首先根據設計尺寸對深松機的各零件進行三維建模,再利用配合命令,定義相合、偏置、角度、固定等約束,將其零部件結合到一起,最終完成施肥深松機各零件的裝配。設計好的三維裝配圖如圖3所示。
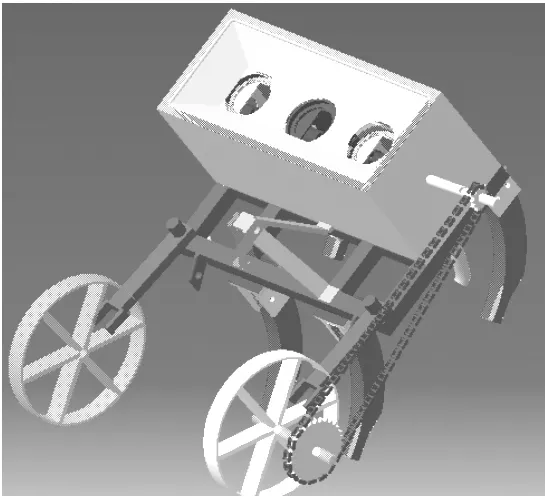
圖3 施肥深松機的三維建模
3 施肥深松機鏟頭的有限元分析
深松鏟是深松機的主要工作部件,鏟頭是深松鏟的關鍵部件,用于深松土壤。鏟頭受力較大且受力復雜,常規的力學理論解析分析難以進行。有限元方法適合于分析復雜工程受力問題。為此本文利用CATIA的有限元分析功能進行鏟頭的靜力學分析。
3.1 材料屬性
鏟頭材料為65Mn,為此選擇metal材料中的steel選項。設置材料密度ρ=7 850 kg/m3,彈性模量E=2.0×105MPa,泊松比μ=0.3.
3.2 定義約束和施加載荷
約束是用來約束模型的相對的運動。每一個節點都存在6個自由度,分別為x,y,z三個豎直方向和三個轉動。根據深松鏟的結構,在深松鏟鏟頭與機架的螺栓連接處設置固定約束。
鏟頭在深松作業時,其所受到的載荷很難計算,這是因為鏟頭的受力與作業工況、結構參數、鏟頭入土角度和土壤物理性質等有關[8]。為了簡化計算,本文采用文獻[9]的相關結論,當深松鏟鏟頭入土深度為350 mm,拖拉機速度為0.5 m/s時,鏟頭阻力F可用公式表示為:
F=1.1473lnA-6.1471
式中:F為鏟頭受力,A為鏟頭在底平面的投影面積。
根據本深松施肥機鏟頭的結構尺寸,代入數據,可近似得到鏟頭的受力F=3.8 kN.
為了簡化分析,將該載荷F添加在鏟頭的中間高度位置上。添加好約束與載荷的鏟頭如圖4所示。

圖4 深松鏟的約束和載荷圖
3.3 網格劃分
網格劃分能夠對三維實體模型劃分成各個參數,是有限元分析的重要環節。進入網格劃分模塊,在size文本域中輸入數值為3 mm,在Element type區域中選擇Parabolic選項,完成最終網格劃分,如圖5所示。

圖5 深松鏟的網格劃分
3.4 深松鏟頭的靜應力分析
對位移量圖和主應力圖進行分析,分析結果如圖6所示。
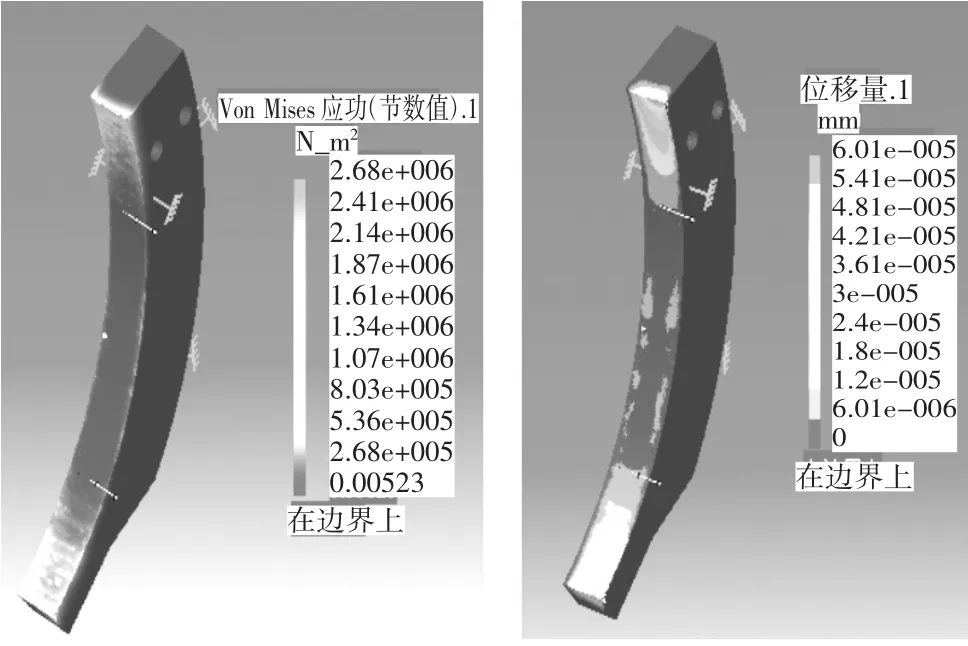
圖6 深松鏟的應力與位移圖
從圖6可以看出,當深松施肥機的行走速度為0.5 m/s,鏟頭入土深度為350 mm時,鏟頭內部的最大應力為268 MPa,本次設計的深松鏟鏟頭材料采用65 Mn,其屈服強度[σs]=784 MPa,可見最大應力小于鏟頭材料的屈服強度。最大位移為6.01×10-5mm,變形量較小。鏟頭內部應力和位移量變形較為合理,鏟頭強度可以滿足作業要求。設計的樣機在某農場試驗,深松施肥效果良好,工作部件可靠性較好。
4 結論
本文設計的施肥深松機,能一次性完成深松和施肥復式作業,效率較高。設計中采用CATIA軟件進行三維設計與有限元靜力學分析,提高了設計效率,在設計階段就避免了農業作業過程中的失效問題。本文分析結果對優化施肥深松機結構提供了理論參考。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
故事大王(2016年7期)2016-09-22 17:30:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
兒童故事畫報(2013年3期)2013-06-24 05:40:30
船海工程(2013年6期)2013-03-11 18:57:27
