一種機載LiDAR點云條帶重疊度自動檢查算法
2018-11-23 07:35:42劉潤東宋袁龍彭桂輝
地理空間信息 2018年11期
關鍵詞:方法
劉潤東,宋袁龍,彭桂輝
(1.廣西壯族自治區遙感信息測繪院,廣西 南寧 530000;2.西安煤航技術發展研究院,陜西 西安 710054)
機載激光雷達(LiDAR)測量技術的出現和發展,為地理空間三維信息的獲取提供了全新的技術手段,是遙感測繪領域繼GPS以來的又一場技術革命[1]。機載LiDAR以其精確、快速、高效的優勢正在逐漸取代傳統攝影測量,作為獲取DEM的主要手段。在機載LiDAR生產過程中,激光航攝數據采集是整個項目生產的數據源頭,控制好激光航攝數據的采集質量才能保證數據后處理生產出合格的測繪產品。在這種形勢下,快速、精確的LiDAR數據質量檢查方法就顯得尤為重要。而目前有關機載LiDAR數據處理的研究基本集中于數據后處理階段,對前期機載LiDAR數據質量檢查方法的研究少之又少。
機載LiDAR在數據采集時,受掃描視場角和航高的限制,一個測區數據的采集必須進行多條航線飛行。這些航線之間需要設置一定的旁向重疊度,以保證數據采集能覆蓋整個測區[2]。CH/T 8024-2011《機載激光雷達數據獲取技術規范》[3](下文簡稱“規范”)在點云數據質量控制內容中明確規定:點云的重疊度應滿足13%~20%,無絕對漏洞。目前,對點云旁向重疊度的檢查主要采用人工目視和抽采樣量測檢查,存在效率低、易漏檢等問題。
通過調研點云旁向重疊度檢查工作的實際需求,在對點云條帶數據邊緣點分析的基礎上,本文提出了一種點云條帶重疊度自動檢查算法。該方法僅需條帶邊緣數據參與計算,減少了海量點云數據對計算機內存帶來的壓力,適合進行多條點云自動化批處理。
1 基于點云邊緣的條帶重疊度自動檢查
1.1 點云條帶重疊度檢查內容
點云條帶的邊界受地形、飛行條件的影響,呈不規則曲線形態,相鄰條帶兩個邊界的不同位置均有各自的重疊度。重疊度的計算公式為:

式中,K為條帶間某位置的重疊度;L為該位置沿掃描線方向的條帶寬度;d為該位置重疊區域的寬度。
規范中所提到的點云重疊度應理解為最小重疊度,即點云條帶間重疊度的最小值,該值若滿足要求,重疊度則為合格。因此,條帶重疊度檢查就是要計算相鄰條帶間的最小重疊度,并檢測該值是否滿足要求。
1.2 條帶邊界獲取
LiDAR點云數據包括多種格式,為了實現不同系統之間的數據共享,美國攝影測量與遙感協會下屬的LiDAR委員會發布了主要面向機載LiDAR數據的標準格式LAS[4]。該格式是目前點云處理的通用格式,絕大多數機載LiDAR作業后獲取的點云成果均以LAS數據提交。LAS格式中定義了條帶邊界點位置標記和激光掃描方向標記,利用這兩種信息均可獲得條帶的邊界點(本文采用推掃式“Z”形激光掃描儀):
1)條帶邊界點位置標記值為1,則表示該點位于掃描線的末尾,即為條帶邊界點。
2)激光掃描方向記錄了該脈沖發射時擺鏡的位置,正向為1,反向為0,記錄掃描方向發生變化的激光腳點即為條帶邊界點。
本文采用第一種方法,遍歷條帶點云數據,提取邊界數據點,將海量的點云數據簡化為兩條邊界點集,再將這些邊界點按照排列順序連接,即可獲得條帶點云的邊界線。
1.3 區域劃分引導的條帶重疊度計算
獲取相鄰條帶的邊界數據后,需對重疊區進行區域劃分。本文根據航飛所獲得的航線數據對重疊區進行帶狀劃分,首先將航線數據等間隔劃分為多段,再計算線上每個頂點位置的重疊度。根據微積分原理,當上述間隔足夠小時,可認為重疊度計算覆蓋了整個重疊區域,這樣就有效避免了漏檢。
根據上述內插的頂點位置,沿航線作垂線,獲取該垂線的直線方程;利用直線方程計算垂線與當前點云條帶邊界多邊形的交點,記為P1、P2,與相鄰條帶重疊邊界線產生的交點記為P3,如圖1所示。線段P1P2即為該位置條帶的寬度d,線段P2P3為該位置重疊區的寬度L。根據式(1)能直接計算得到該位置的旁向重疊度。遍歷航線上的內插頂點,采用上述方法可獲得重疊區域每個位置的重疊度。算法流程見圖2。
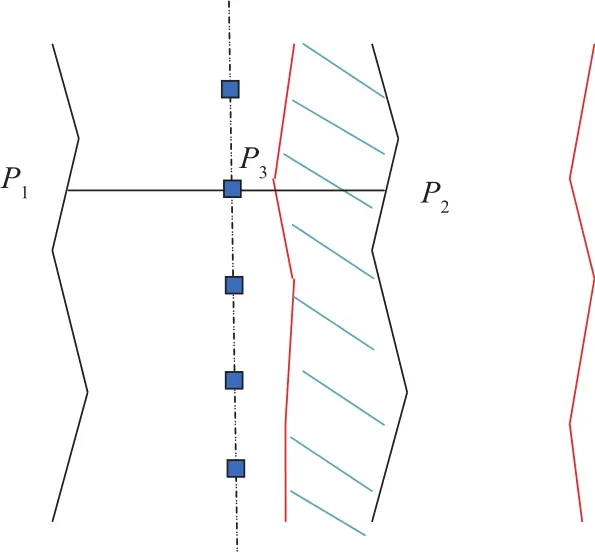
圖1 重疊度計算示意圖
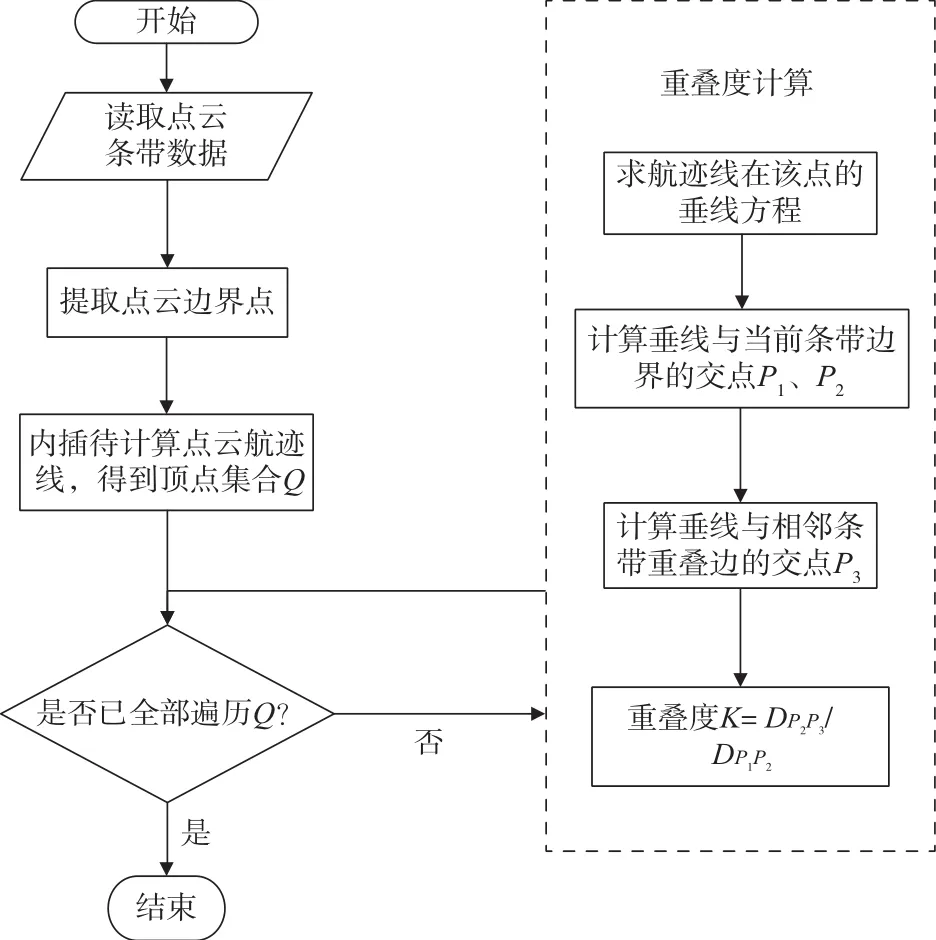
圖2 算法流程圖
2 實驗與結果分析
為了驗證本文所述方法的正確性,在VS2010編程環境下,使用C++語言對該算法進行了編程實現,并選取廣州某地LiDAR航飛工程采集的實際數據進行實驗。
實驗數據由Leica ALS 60激光掃描儀采集,預處理后的點云條帶長度約為10 km,點云密度約為6個/m2,單個條帶激光腳點數量約為50 000 000個。首先對條帶數據進行邊界點提取,結果如圖3所示;然后選取不同的區域劃分間隔對相鄰兩條數據的重疊度進行計算,結果如圖4所示;最后根據預設重疊度的合格值判斷該條帶重疊度是否合格。本文對該組2個條帶實驗數據的計算時間進行統計,如表1所示。
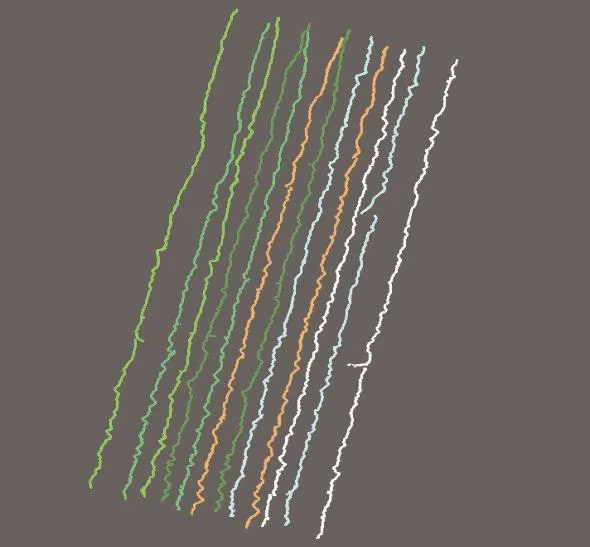
圖3 點云邊界提取結果
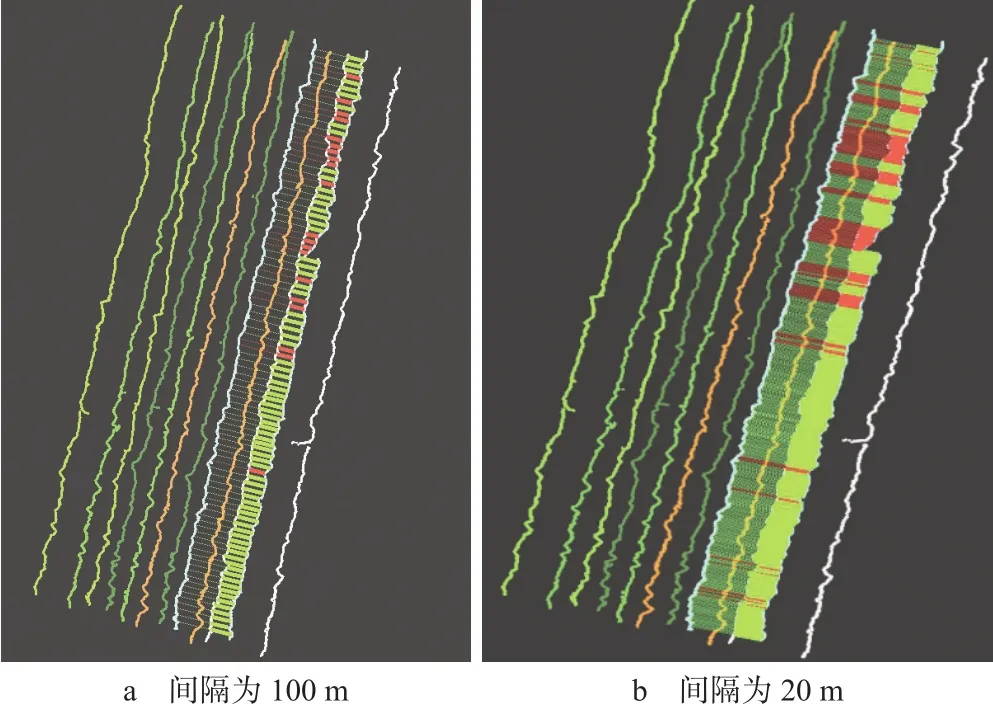
圖4 重疊度計算結果

表1 不同參數的計算時間
實驗結果表明,本文所述方法能正確計算條帶間的重疊度,計算時間與劃分區域間隔成反比,但均有較高的計算速度,根據實際應用經驗,一般選取100 m的采樣間隔即可滿足實際質檢需求。
3 結 語
本文提出了一種點云重疊度自動檢查方法,原理簡單,能快速計算并檢查海量點云的重疊度指標,替代了人工目視交互、逐條帶采樣抽查工作,極大地提高了LiDAR航飛數據質量控制和驗收工作的效率。同時,該方法也存在一些不足:①檢查對象為擺鏡式激光掃描儀采集的線狀分布激光點,對于其他方式,如旋轉棱鏡(圓形掃描)還未涉及;②對于特殊的航飛作業,如帶狀曲線式飛行路線所采集的條帶數據還需進一步改進,這些將是下一步的研究目標。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56