一種仿生軟體驅(qū)動器的設(shè)計與彎曲建模研究*
2018-11-27 05:08:10許宗貴陳凌峰潘魯鋒鮑官軍
機(jī)電工程 2018年11期
許宗貴,方 醒,陳凌峰,潘魯鋒,鮑官軍
(浙江工業(yè)大學(xué) 機(jī)械工程學(xué)院,浙江 杭州 310014)
0 引 言
目前,機(jī)器人在越來越多的領(lǐng)域中得到應(yīng)用,對機(jī)器人的要求也隨之提高:靈活性、柔性等。使用剛性的機(jī)械結(jié)構(gòu)難以設(shè)計出滿足要求的機(jī)器人。相比之下,由柔性部件組成的軟體機(jī)器人具有任意改變自身形狀、抓取脆弱物體等的能力。
日本的SUZUMORI開發(fā)研制了三自由度氣動人工肌肉FMA[1],其表面有約束膨脹的纖維線,可在3個并聯(lián)氣室驅(qū)動下完成任意方向、角度的彎曲[2];后來研究者用FMA做成了四指靈巧手和仿蛇形軟體機(jī)器人[3]。
在歐洲STIFF-FLOP(可變剛度軟體手術(shù)操作驅(qū)動器)項目中,研究者大體上沿用了日本的FMA結(jié)構(gòu),但在驅(qū)動器的中間增加了剛度主動調(diào)節(jié)氣腔[4],通過給剛度調(diào)節(jié)腔抽負(fù)壓導(dǎo)致顆粒物擠壓的方式來調(diào)節(jié)驅(qū)動器的剛度[5]。
意大利、瑞士等5國研究機(jī)構(gòu)進(jìn)行了仿生章魚的研究[6]。項目組試驗分析了章魚肌肉幾何和生物力學(xué)特性[7-9],提出了基于EAP人工肌肉的章魚觸手結(jié)構(gòu),當(dāng)施加2 000 V電壓時,EAP仿生章魚觸手可達(dá)到約20%的收縮量[10];后來,項目組采用SMA骨架、硅橡膠外套和電機(jī)繩索驅(qū)動結(jié)構(gòu)研制出了章魚腕足機(jī)器人[11];此外,TSUKAGOSHI等[12]開發(fā)了地震災(zāi)后救援的氣動仿生象鼻連續(xù)體機(jī)器人ActiveHose;加拿大Kinetic Sciences公司研制了KSI仿生觸角機(jī)器人[13];天津大學(xué)王華等[14]設(shè)計了一種軟體彎曲驅(qū)動器,實(shí)現(xiàn)了驅(qū)動器單自由度的彎曲。
現(xiàn)階段對于軟體機(jī)器人的研究多集中在新型驅(qū)動器以及創(chuàng)新結(jié)構(gòu)的設(shè)計上,氣動軟體驅(qū)動器中少有文獻(xiàn)提出輸入氣壓與彎曲幾何參數(shù)之間的關(guān)系。
基于章魚腕足的生物構(gòu)造,本文提出一種新型的多腔耦合氣動結(jié)構(gòu)—仿生軟體驅(qū)動器。
1 仿生軟體驅(qū)動器結(jié)構(gòu)
象鼻、章魚腕足可以通過內(nèi)腔流體介質(zhì)壓力調(diào)控自身的剛度。據(jù)此,本文提出了一種仿生軟體驅(qū)動器,其結(jié)構(gòu)模型如圖1所示。

圖1 驅(qū)動器的結(jié)構(gòu)
仿生軟體驅(qū)動器的形狀為等截面圓柱體,內(nèi)部設(shè)置了兩類驅(qū)動氣腔,彎曲驅(qū)動腔和剛度調(diào)節(jié)腔。剛度調(diào)節(jié)腔設(shè)置在中心位置,2個彎曲驅(qū)動腔對稱均布在剛度調(diào)節(jié)氣腔周圍,各運(yùn)動驅(qū)動氣腔之間形成相互并聯(lián)關(guān)系,調(diào)節(jié)各運(yùn)動氣腔的氣壓可實(shí)現(xiàn)軟體驅(qū)動器的不同運(yùn)動形式,如伸長、不同方向和角度的彎曲等。剛度調(diào)節(jié)氣腔的結(jié)構(gòu)為圓柱形通孔,其中充入高壓氣體可增加軟體驅(qū)動器的承載彎矩,即增加軟體驅(qū)動器的剛度,從而實(shí)現(xiàn)其剛度的動態(tài)調(diào)整。
由于橡膠材料具有非常好伸縮性,斷裂伸縮率可以達(dá)到1 000%,如果以純橡膠作為驅(qū)動器制造材料,那么驅(qū)動器充入高壓氣體時氣腔會急劇膨脹,膨脹大小甚至可以超過其本身大小,對于軟體驅(qū)動器抓持目標(biāo)物體并無益處。因此,很多研究者采取外包纖維膜、外包絡(luò)纖維線等方法。在外部添加加固材料在制作工藝上可以簡便很多,但是柔性材料與外部加固材料耦合度和平整度無法媲美內(nèi)部嵌入式加固方式。本文選擇在柔性材料壁內(nèi)嵌入細(xì)彈簧,以抑制驅(qū)動器的徑向膨脹,同時由于彈簧本身線徑很細(xì)對于軟體驅(qū)動器的軸向伸長幾乎沒有影響,而且徑向膨脹得到限制也有益于軸向的伸長。
2 彎曲理論分析
2.1 靜態(tài)模型
本研究對軟體驅(qū)動器進(jìn)行靜力分析,驅(qū)動器受力分析圖如圖2所示。

圖2 驅(qū)動器受力分析圖
軟體驅(qū)動器的受力主要包括大氣壓力、氣腔內(nèi)部高壓氣體的壓力、硅膠材料的彈性力以及軟體手指的輸出力,即:
F=Fp1+Fp2+Fp3-Fa-FPatm
(1)
式中:F—驅(qū)動器輸出力;FP1,F(xiàn)P2,F(xiàn)P3—驅(qū)動器彎曲腔高壓氣體形成壓力;Fa—軟體驅(qū)動器硅橡膠材料的彈性力;FPatm—大氣對驅(qū)動腔壓力。
軟體驅(qū)動器中包含2個彎曲驅(qū)動氣腔和1個剛度調(diào)節(jié)氣腔,在充入高壓氣體時會引起氣腔壁的橡膠材料發(fā)生局部拉伸變形。如果兩個氣腔同時充入等壓的高壓氣體,則各氣腔壁拉伸變形可達(dá)到一致,并由于端蓋的限制作用,那么軟體驅(qū)動器將發(fā)生均勻的軸向伸長運(yùn)動;當(dāng)彎曲驅(qū)動腔充入的高壓氣體氣壓大小不一致時,各氣腔壁的拉伸變形程度各不相同而發(fā)生耦合,導(dǎo)致軟體驅(qū)動器內(nèi)部存在應(yīng)力分布,由假設(shè)形成曲率半徑均勻變化的彎曲變形,拉伸程度較大的氣腔壁曲率半徑較大;反之,拉伸程度較小的氣腔壁曲率半徑較小。
軟體驅(qū)動器的截面如圖3所示。
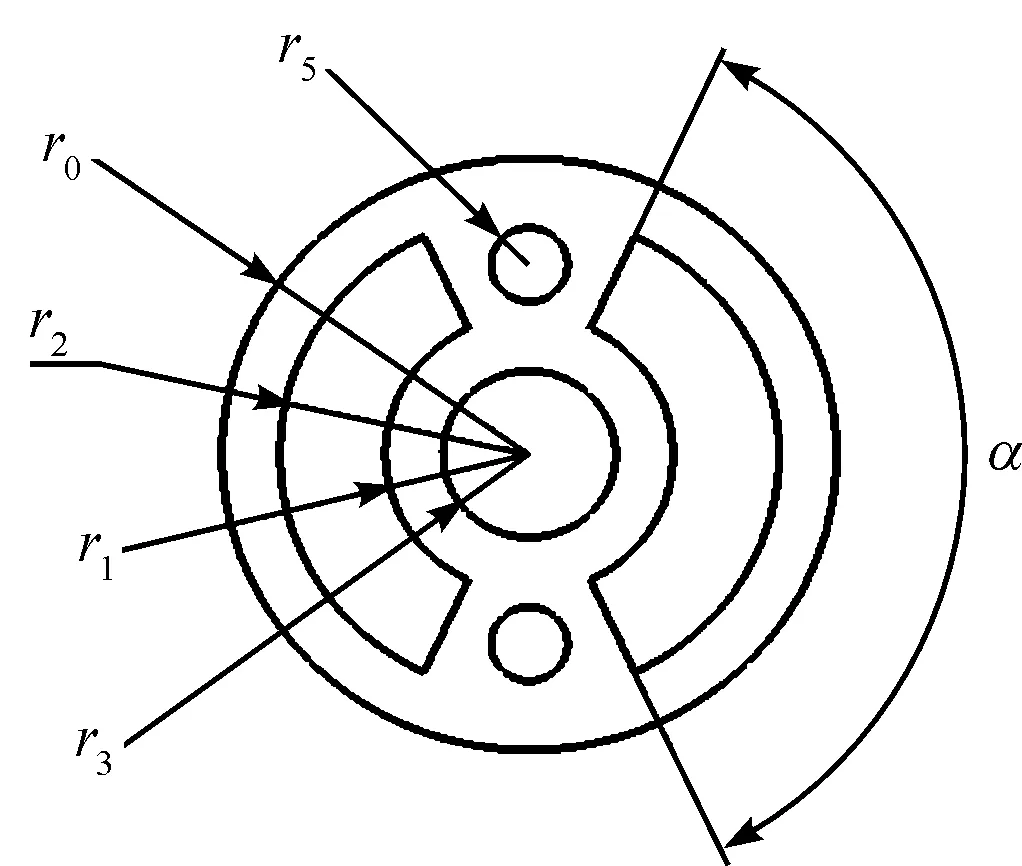
圖3 兩腔手指的截面r0—軟體驅(qū)動器外壁半徑;r1,r2—彎曲驅(qū)動腔外壁外、內(nèi)徑;r3—剛度調(diào)節(jié)腔外壁;α—彎曲驅(qū)動氣腔的扇形圓心角
圖3中,軟體驅(qū)動器的基節(jié)截面,中心軸向通孔為剛度調(diào)節(jié)氣腔,周邊軸向2類通孔中,面積較大的為彎曲驅(qū)動氣腔,面積較小的是圓形通孔的為傳感器通道,通道里面放置不可拉長的尼龍線,當(dāng)驅(qū)動器發(fā)生彎曲時尼龍線和驅(qū)動器底端會發(fā)生相對位移,以該位移來反饋軟體驅(qū)動器的變形。
Fp1+Fp2+Fp3=P1·S1+P2·S2+P3·S3
(2)
式中:P1,P2—軟驅(qū)動器氣腔壓力,在充入等壓的高壓氣體的情況下P1=P2;Si—?dú)馇粴鈮鹤饔妹娣e,i=1,2,3。
(3)
同理,對于大氣壓力FPatm,有:
(4)
硅橡膠主體彈性力為:
Fa=EεAr
(5)
式中:E—硅橡膠材料的彈性模量,可由拉伸實(shí)驗得出;Ar—硅橡膠材料的有效截面積。
由截面幾何關(guān)系可得:
(6)
硅橡膠膠材料的應(yīng)變?yōu)椋?/p>
(7)
式中:ΔL—驅(qū)動器變形的伸長量。
將式(6,7)代入式(5),可得:
(8)
聯(lián)立式(1,3,4,6)可得軟體驅(qū)動器的靜態(tài)模型關(guān)系式:
(9)
當(dāng)外力F=0時,可以得到P-Patm與ΔL關(guān)系:
(10)
2.2 彎曲變形的幾何分析
軟體驅(qū)動器由液態(tài)硅橡膠經(jīng)澆鑄后固化而成,在拉伸與彎曲變形時硅膠材料發(fā)生均勻變形。軟體驅(qū)動器上下兩端均粘結(jié)有端蓋,在拉伸與彎曲變形時軸向兩端面始終保持平齊。在發(fā)生非等壓拉伸變形時,單腔氣壓驅(qū)動或者兩腔耦合驅(qū)動作用會使軟體驅(qū)動器的中心軸發(fā)生彎曲變形。
兩腔手指在彎曲狀態(tài)下的示意圖如圖4所示。
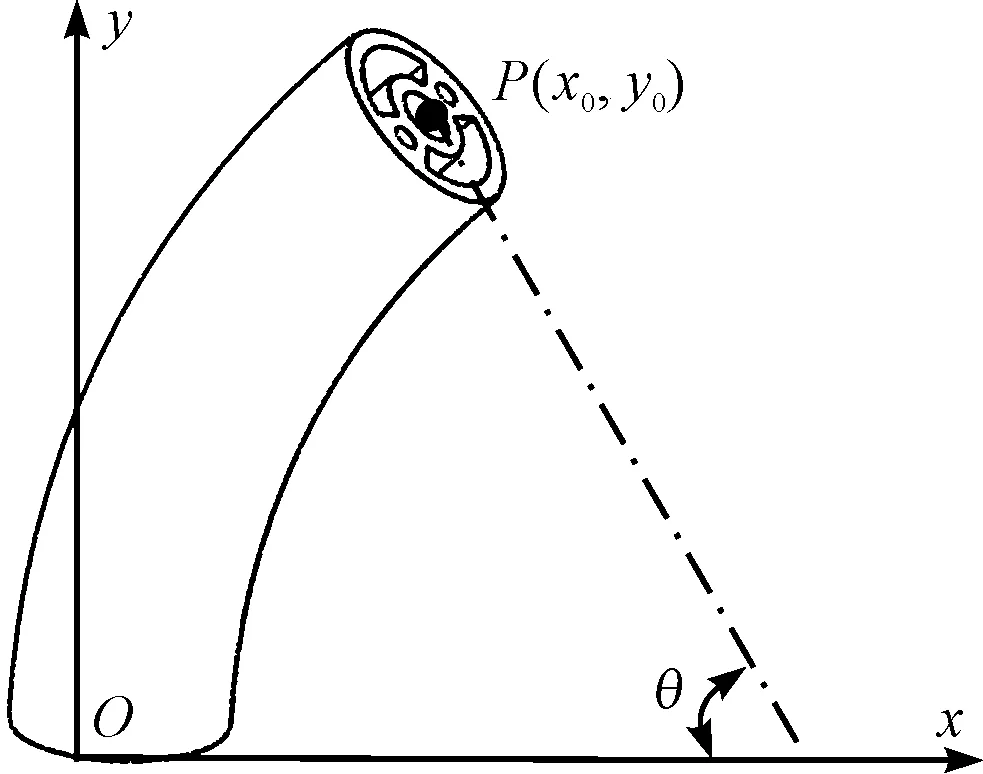
圖4 兩腔手指在彎曲狀態(tài)下的示意圖θ—驅(qū)動器的彎曲角度
在控制層面放緩高壓氣體的變化速率,因此橡膠材料的阻尼效應(yīng)幾乎可以忽略,而2個氣腔可以簡化為彈簧模型。驅(qū)動器截面示意圖如圖5所示。

圖5 驅(qū)動器截面示意圖
本研究將兩個氣腔簡化為2個彈簧,并且彈簧處在氣腔形心的位置。因為彎曲驅(qū)動腔分布為對稱分布,彎曲驅(qū)動氣腔的彈簧位置在同一圓周半徑r上。簡化等效彎曲驅(qū)動腔為彈簧,彈簧所在位置為彎曲驅(qū)動腔的形心上,該形心距離圓心的距離為r:
(11)
定義等效彈簧的長度以l1、l2表示,橡膠管的彎曲為均勻連續(xù)變形,定義等效彈簧長度不是氣腔壁的拉伸長度,而是氣腔形心位置的拉伸長度。對l1和l2作如下定義:
(12)
式中:Δli—基節(jié)簡化彈簧的伸長量,i=1,2。
根據(jù)幾何關(guān)系,可得:
(13)
求解式(13),可以得到θ,R0與l1、l2的關(guān)系:
(14)
(15)
2.3 彎曲變形的力學(xué)分析
軟體驅(qū)動器采用一端夾持固定的方式,另一端無結(jié)構(gòu)限制,固定、自由端示意圖如圖6所示。

圖6 固定、自由端示意圖
對軟體驅(qū)動器建立彎曲模型的關(guān)鍵在與求解自由端的力/力矩平衡,自由端的主要受力同樣如圖6所示,建立力平衡方程:
(15)
同樣,根據(jù)力矩平衡公式可得:
(16)
式中:MPi—平衡氣壓力(高壓氣體與外部大氣壓合力)對彎曲軸的力矩,i=1,2。
(17)
將式(13,14)代入(17),可化簡得:
(18)
通過式(18),可推斷出彎曲驅(qū)動腔壓力差與彎曲驅(qū)動腔等效長度伸長量即ΔPi與Δli存在線性關(guān)系:Δli=ΔPi×k,,且其比例系數(shù)k為:
(19)
2.4 彎曲理論模型
將k代入式(14,15),即可得到氣壓與曲率半徑R、彎曲角度θ的關(guān)系:
(20)
(21)
3 實(shí)驗與結(jié)果分析
3.1 實(shí)驗平臺
軟體驅(qū)動器實(shí)驗系統(tǒng)原理如圖7所示。
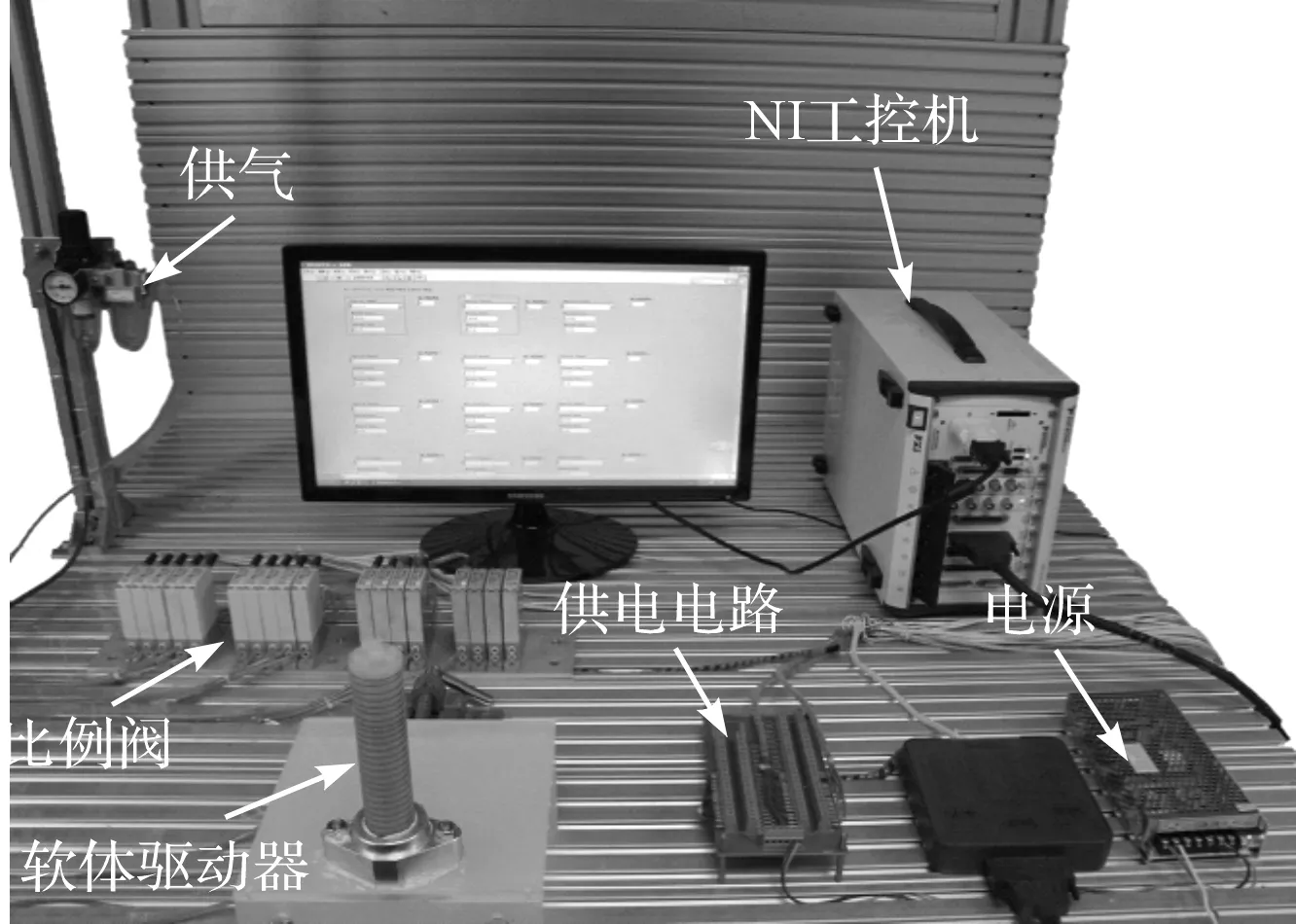
圖7 實(shí)驗平臺
電回路。NI工控機(jī)上編寫Labview程序,驅(qū)動靜態(tài)模擬輸出板卡,輸出電壓信號,該信號的輸出同時需要通過屏蔽式接線端子轉(zhuǎn)接從而控制電氣比例閥氣壓輸出。由于電氣比例閥供電需要用到24 V以及信號電壓需要接地的基準(zhǔn)電壓,在此加入24路供電電路。工控機(jī)采用美國國家儀器(NI)PXI-1042Q。屏蔽盒接線端子選用NI SCB-68A配有68針連接端口的插入式DAQ設(shè)備。
氣回路。選用空氣壓縮機(jī)作為氣壓源,通過油霧分離器、減壓閥得到適合實(shí)驗作業(yè)的氣體接入電氣比例閥作為調(diào)壓起源,電氣比例閥根據(jù)電回路接入的電壓信號控制輸出氣體的壓力,并輸入驅(qū)動器的各個驅(qū)動腔。
在無外載荷作用的情況下,筆者對軟體驅(qū)動器進(jìn)行了充氣實(shí)驗與排氣實(shí)驗。在驅(qū)動器的主動彎曲實(shí)驗中,軟體驅(qū)動器兩個驅(qū)動腔中充入不同大小的氣壓,氣壓由信號電壓控制。
3.2 實(shí)驗與結(jié)果分析
本文采用單腔驅(qū)動的方式驗證彎曲驅(qū)動模型。在0~0.18 MPa的氣壓范圍內(nèi),每隔0.03 MPa記錄一次氣壓與彎曲角度。
實(shí)際實(shí)驗的情況如圖8所示。
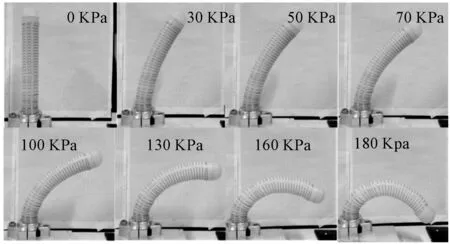
圖8 驅(qū)動器彎曲實(shí)驗
實(shí)際數(shù)據(jù)如圖9所示。

圖9 驅(qū)動器彎曲實(shí)驗與仿真對比分析
圖9中,在開始階段軟體驅(qū)動器理論數(shù)據(jù)曲線略高于實(shí)驗數(shù)據(jù)曲線,在氣壓漸漸增大之后理論數(shù)據(jù)小于實(shí)驗數(shù)據(jù)。綜合分析靜態(tài)驅(qū)動實(shí)驗數(shù)據(jù)與彎曲驅(qū)動實(shí)驗數(shù)據(jù)可知,導(dǎo)致誤差的原因有:軟體驅(qū)動器的硅膠材料主體具有粘滯性,充氣開始階段,由于硅膠主體的遲滯性,使得軟體驅(qū)動器彎曲角度相比于理論值較小,但是隨著驅(qū)動腔氣壓的增大,硅橡膠膨脹加速,導(dǎo)致彎曲角度慢慢大于理論角度。
另外,軟體驅(qū)動器在彎曲的時候,其實(shí)際壁厚在每個位置是不一樣的,造成其自身的彈性模量會發(fā)生變化,導(dǎo)致實(shí)際角度與理論存在差距。實(shí)際實(shí)驗中,軟體驅(qū)動器在彎曲的時候,其內(nèi)腔的彈簧也發(fā)生彎曲,對軟體驅(qū)動器的彎曲造成一定的摩擦阻力,而理論建模時忽略了軟體驅(qū)動器內(nèi)彈簧和硅膠主體之間的摩擦阻力。軟體驅(qū)動器在內(nèi)腔氣體壓力的驅(qū)動下會發(fā)生一定程度的徑向變形,而理論建模時忽略了這一點(diǎn),使得實(shí)驗中測得的彎曲角度會出現(xiàn)偏小的情況。
4 結(jié)束語
本文提出了一種新型的仿生軟體驅(qū)動器,該軟體驅(qū)動器采用固態(tài)硅膠澆注而成,并且在柔性材料壁內(nèi)嵌入細(xì)彈簧以限制其徑向膨脹;建立了其靜態(tài)模型和主動彎曲模型,對軟體驅(qū)動器進(jìn)行了彎曲驅(qū)動實(shí)驗。
根據(jù)實(shí)驗和理論數(shù)據(jù)的對比發(fā)現(xiàn):在相同的氣壓下,實(shí)際的彎曲角度在剛開始通入氣壓時略小于理論值,進(jìn)一步優(yōu)化軟體驅(qū)動器軟體的材料和減小彈簧的線徑可以減弱這種影響;彎曲實(shí)驗也表明了該理論的正確性。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中華詩詞(2020年1期)2020-09-21 09:24:52
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55