基于故障樹理論的CAN網絡系統故障診斷分析與研究(上)
2018-11-29 02:04:56馬明芳
汽車與駕駛維修(維修版) 2018年10期
文:馬明芳
CAN網絡系統技術目前是汽車電子技術發展中的普遍成果,而且還在不斷地發展中。不同的廠家、不同的車型上配備的CAN網絡系統不盡相同。CAN網絡系統的出現對于汽車發展來說有諸多優點,汽車上的各種電子裝置與設備通過總線技術連接成一個網絡環境,彼此之間進行數據交換和信息資源共享,減少和優化了汽車電子控制傳感器和執行器的數量和配置,大大減少和優化了全車線束的數量和布局等等,使汽車的動力性、經濟性和環保性等達到最佳。但是,對于汽車后市場服務的維修診斷技術提出了更高的要求,增加了難度系數和工作量。本文研究CAN網絡系統的故障診斷,目的是建立起來關于汽車CAN網絡系統的故障診斷模型,對其進行可靠性分析,分析CAN總線技術的典型故障的故障原因和故障部位,梳理其故障現象和故障原因之間的因果關系,使其復雜性和難度有所降低,對汽車維修后市場從業人員給予技術支持。
1.CAN網絡系統故障診斷研究的國內外現狀
對于國外CAN網絡系統的故障診斷技術而言,大致采取2種方式:一種是通過故障診斷儀讀取故障波形進行故障分析,另一種是通過檢測電阻值進行故障分析。在很多專用的診斷設備里,已經存儲了CAN總線的典型故障波形,只需技術人員能夠分析對比,即可分析故障類型。但是,對于國外CAN網絡故障診斷技術而言,它們還沒有建立起來CAN總線技術的故障樹,還缺少系統的綜合研究和對比研究,只是處于個例和案例研究階段,還有很大的研究空間。
在國內,對于CAN網絡系統故障診斷技術的研究,相對于CAN網絡系統的開發而言得到了足夠的重視,很多一線技術人員和培訓人員已經開始逐漸研究CAN網絡系統的故障類別,力求把CAN總線的典型故障整理出來。本文也正是在這樣的背景下產生的。
2.CAN網絡系統故障診斷存在的問題
CAN網絡系統無論是在國外還是在國內都處于快速發展的新興技術領域,很多專家集中精力致力于其故障診斷技術的研究,雖然總結了一定的規律,也取得了一定的成績,但是由于其系統的復雜性和技術難度大,對于CAN網絡系統故障診斷在故障樹理論研究方面一直處于空白階段。CAN網絡系統故障診斷研究方面還存在一定的困難和問題。
(1)CAN網絡系統總線的結構組成和原理特性增大了進行故障診斷研究的難度系數。CAN網絡系統涉及電子技術、計算機技術、自動化控制技術和機械技術等等,在一個網絡結構中往往涉及多個電子控制單元,一個故障現象也往往涉及多個系統的故障原因,錯綜復雜的網絡關系增大了CAN網絡系統故障診斷研究的難度系數。
(2)CAN網絡系統總線拓撲結構的復雜性決定了故障診斷與分析的艱巨性。現有車型的CAN網絡系統多種總線聯合運用,互相之間的彼此控制或者協調關系,使得故障分析相比較沒有網絡的車型而言難度加大,任務艱巨。
(3)CAN網絡系統的故障診斷研究目前還處于起步階段,沒有大量的實際案例或者是數據的支撐,難以形成系統性和規范性。研究結論的準確性和可靠性取決于大量數據的分析和支撐,而CAN網絡系統的故障診斷案例還比較少,還是處于發展階段,缺乏系統的數據事實,給研究工作帶來很大的困難,需要進行大量的實驗積累。
(4)對于CAN網絡系統故障診斷而言,到底采用什么樣的研究方法才可以系統、真實、科學的形成研究結論,換句話說,采用什么樣的分析方法更適合CAN網絡系統故障診斷的研究,還有待于進一步分析確認。
盡管CAN網絡系統故障診斷的研究存在一定的困難和問題,但是鑒于在汽車其他系統的故障診斷方面已經有了成熟的經驗和積累,采用合適的研究方法也一定適用于CAN網絡系統的故障診斷。
3.CAN網絡系統故障診斷的研究方法
對于CAN網絡系統故障診斷研究,針對故障現象分析最重要的就是對故障原因進行分析。而對于故障分析目前比較常見的分析方法有:故障樹分析(FTA)、故障模式和影響分析(FMEA)、共同原因故障分析(CCFA) 方法等。
綜合對比這幾種常用的分析方法,故障樹分析法—FTA(Fault Tree Analysis)是一種對復雜系統可靠性和安全性分析的有效方法。故障樹分析法不僅可以分析單一故障原因所引起的系統故障,而且還可以分析由2個或多個部件同時損壞時才發生的系統故障,因此在復雜系統中被廣泛應用。考慮到CAN網絡系統的復雜性,采用故障樹分析法比較合適。CAN網絡系統故障比較典型,其相互之間的邏輯層次關系根據網絡拓撲結構圖分析,脈路分明,非常適合用故障樹分析法進行層層分析演繹展開。故障樹分析法是利用邏輯樹狀圖形,把每一層事件相互之間的邏輯因果關系逐漸推理出來。樹尖是頂事件,即所謂的故障現象,最底層是每一個具體不能再細分的故障原因,中間是承上啟下的過渡原因。通過一層層的展開梳理,故障樹分析法把導致頂事件的所有影響因素按照一定的工藝順序、發生順序或重要程度繪制出因果邏輯圖,一目了然的分析出所有的故障原因,并且能夠進行定性分析和定量分析,知道哪些原因或部件損壞會導致哪些故障出現,哪些故障的發生概率是多少。通過故障樹分析,根據分析結果采取相應的措施,從而提高CAN網絡系統的使用可靠性,減少故障率。
4.CAN網絡系統的故障采集與分析
對CAN網絡系統故障的數據采集是進行故障分析的前提,是建立故障樹分析法研究故障率的第一步工作任務,也是確定故障原因的重要基礎。只有對CAN網絡系統進行準確、翔實、大量、深入和系統地故障分析,才能找出產生故障的所有原因,通過修理或者更換等后期補救措施,恢復CAN網絡系統的正常性能。
(1)CAN網絡系統故障分類
CAN網絡系統的故障發生情況比較復雜,故障分類對于故障樹的建立是必不可少的環節。CAN網絡系統的故障發生情況不太固定,但是基本的故障類型是比較固定的。即使是混合故障發生時,只要遵循CAN總線基本故障的分析方法,依然能夠準確分析混合網絡故障類型。依照CAN總線網絡故障的實際發生概率情況,CAN總線系統的典型故障分類如下。
CAN 總線網絡系統故障分類為:CAN總線(CAN-H或CAN-L)對正極短路故障、CAN總線(CAN-H或CAN-L)對地短路故障、CAN總線CAN-H與CAN-L彼此之間短路故障、CAN總線(CAN-H或CAN-L)對某一控制單元斷路故障、CAN總線CAN-H和CAN-L在某一段信號反向傳輸故障。
(2)CAN網絡系統故障數據采集途徑與記錄
對CAN網絡系統故障進行數據采集,把最為基礎的、最為典型的、最為常見的故障信息采集出來,為故障樹的建立采集第一手基礎資料。因為CAN網絡系統的故障追蹤只能是來自企業一線實踐積累,因此在采集信息時參照汽車維修企業和行業標準,制定CAN網絡系統的故障記錄表格,故障記錄表格的主要內容詳見圖1。利用制定的故障記錄表格,對CAN網絡系統的實際故障進行跟蹤記錄。
本文中具體的CAN網絡系統故障數據采集途徑,主要來源于筆者本人親自調研和實踐采集和北京市的20家包括奔馳、寶馬、奧迪在內的多個品牌連鎖4S店。筆者對上述20家4S店關于CAN網絡系統故障進行追蹤,根據典型故障的歸納總結進行分析處理,填寫圖1所示的CAN網絡系統故障記錄表。通過3年時間的采集,筆者獲取了110個關于CAN網絡系統的典型真實故障,經過和企業專家的分類整理,歸納出17種故障事件。分總線類型對故障進行采集和分析。每種總線系統的故障均可以通過示波器調取信號波形,跟正常波形進行信號波形對比分析后得出典型故障的故障波形。在下文中涉及的所有用博世740調取的故障波形部分,均為本人在德國進修學習時獲得的真實故障實驗波形。
5.CAN總線系統診斷故障樹模型
依據數據采集原則和途徑,建立CAN總線系統診斷故障樹模型如圖2和表1所示。
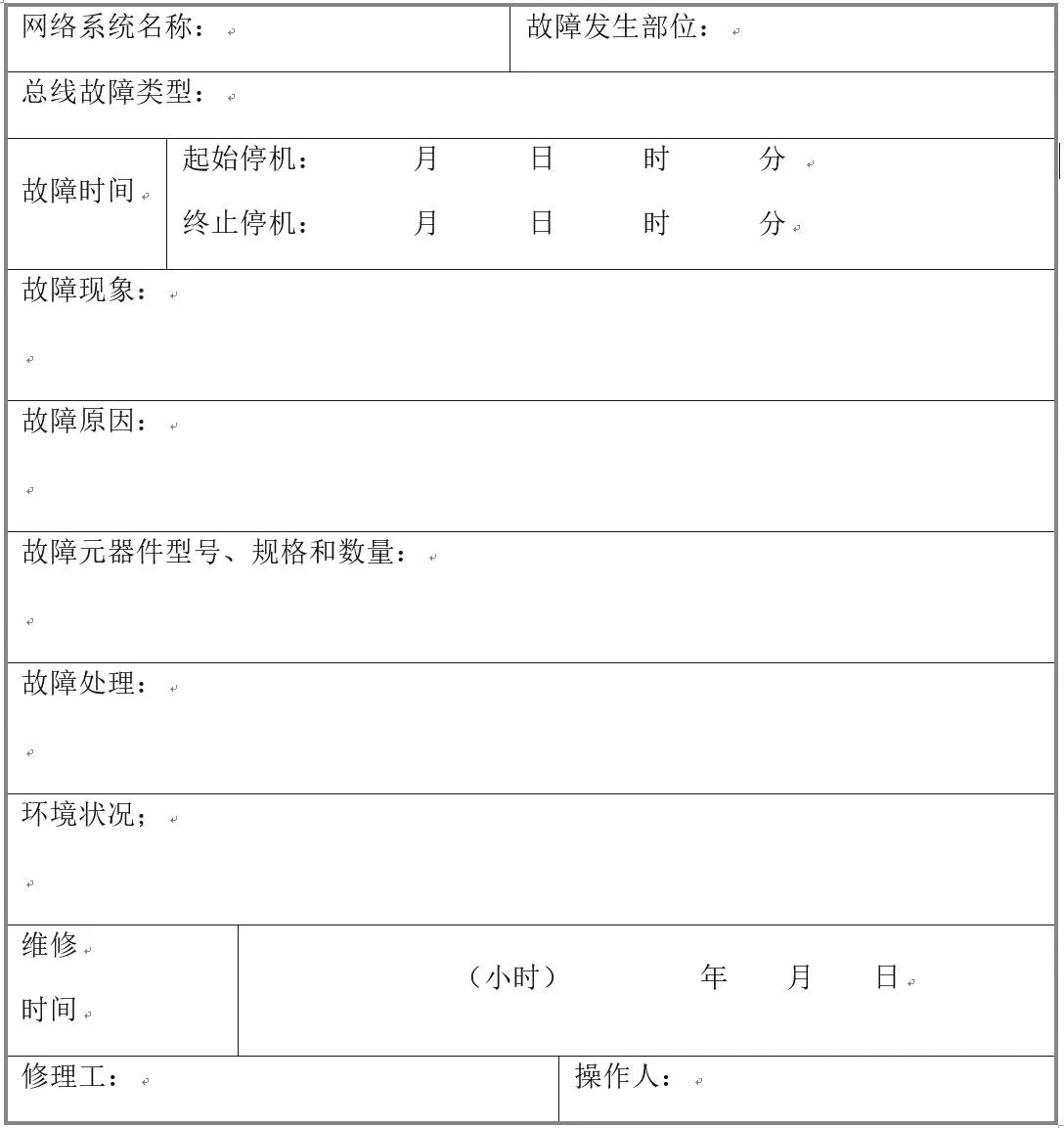
圖1 CAN網絡系統故障記錄表示例
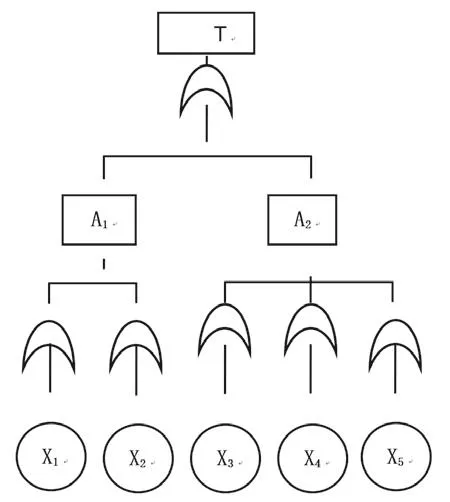
圖2 CAN總線系統診斷故障樹模型
6.建立CAN網絡系統故障樹模型
通過前期對故障數據采集和分析,深入分析CAN總線系統的典型故障事件與故障原因之間的因果邏輯關系,建立CAN網絡系統故障診斷的故障樹模型,重點以CAN系統最為典型的故障“發動機不起動且儀表多項警告燈報警”的故障樹為例進行分析和推理。
(1)CAN系統故障樹各級事件的選取
CAN系統故障樹頂事件就是系統分析最不希望發生的事件,也是顯著影響CAN總線網絡系統可靠性水平的重大故障事件。本文選取CAN網絡系統癱瘓故障——發動機不起動且儀表多項警告燈報警(T)作為整體故障樹的頂事件。依據CAN系統的網絡拓撲結構原理圖和故障原因分析結果,把此CAN網絡系統中與本故障征兆相關的系統或電壓分配器進一步逐層細分,依次選取為中間事件:N10/1帶熔絲和繼電器的前側信號采集及促動控制SAM控制單元(A1)、X30/34車內控制器區域網絡(CAN)/駕駛室電壓分配器插座(A2)、X30/31底盤控制器區域網絡(CAN)/駕駛室電壓分配器插座(A3)、X30/30底盤控制器區域網絡(CAN)/車架地板總成電壓分配器插座(A4)、A13電動駐車制動器控制單元(A5)。底事件是導致發動機不起動且儀表多項報警的各系統發生的直接和不可再分的原因。本文所建立的CAN系統故障樹分為5層:頂事件(T)、第2層(A1-A5)、第3層(B1-10)、第4層(C1-C4)、底層(X1-X45)。故障樹中涉及的所有事件詳見表4、表5。

表1 CAN總線系統故障事件代碼及名稱
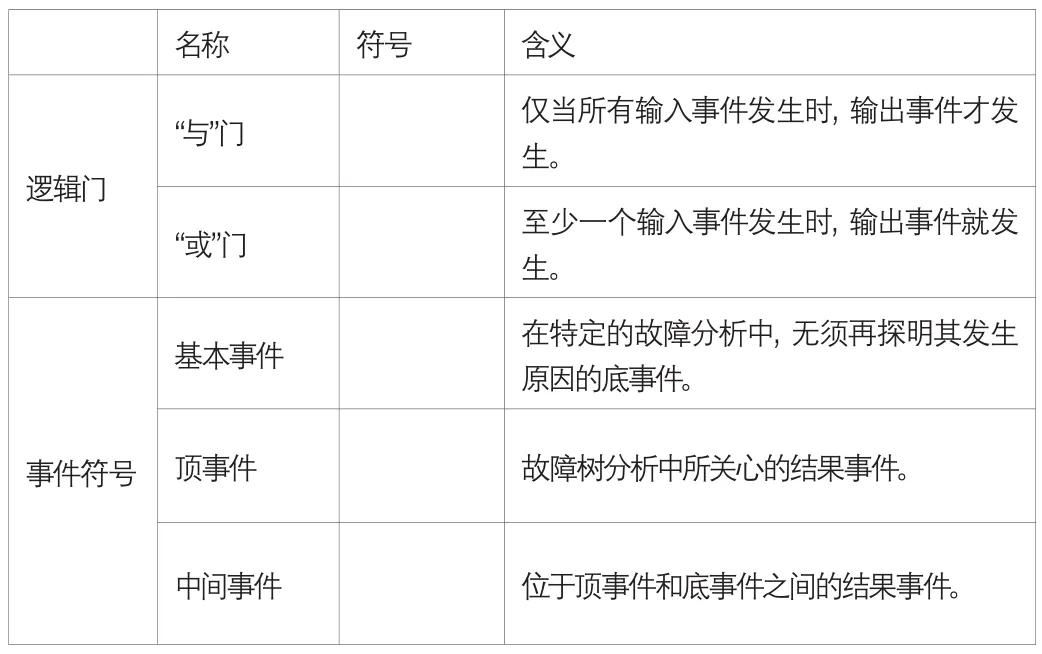
表2 CAN系統故障樹所用到的邏輯門和事件符號及含義
(2)CAN系統故障樹的建立
在建立CAN系統故障樹所用到的邏輯門和事件符號及含義見表2。
CAN的常見故障模式當前顯性顯示的故障征兆:“發動機不起動且儀表ESP、ABS、AB等多項警告燈報警”為頂事件,采取正向推理原理,一直搜索到底事件即故障原因。
CAN系統的網絡拓撲結構如圖3所示。發動機不起動且多項儀表報警燈報警,屬于CAN系統網絡癱瘓的典型故障表征。根據故障診斷儀進入N92網關初診的結果并且結合圖3可知,主要故障原因與N10/1(帶熔絲和繼電器的前側信號采集及促動控制SAM控制單元)、X30/34(車內控制器區域網絡 (CAN)/駕駛室電壓分配器插座)、X30/31(底盤控制器區域網絡 (CAN)/駕駛室電壓分配器插座)、X30/30(底盤控制器區域網絡 (CAN)/車架地板總成電壓分配器插座)、A13(電動駐車制動器控制單元)等幾方面有關系。
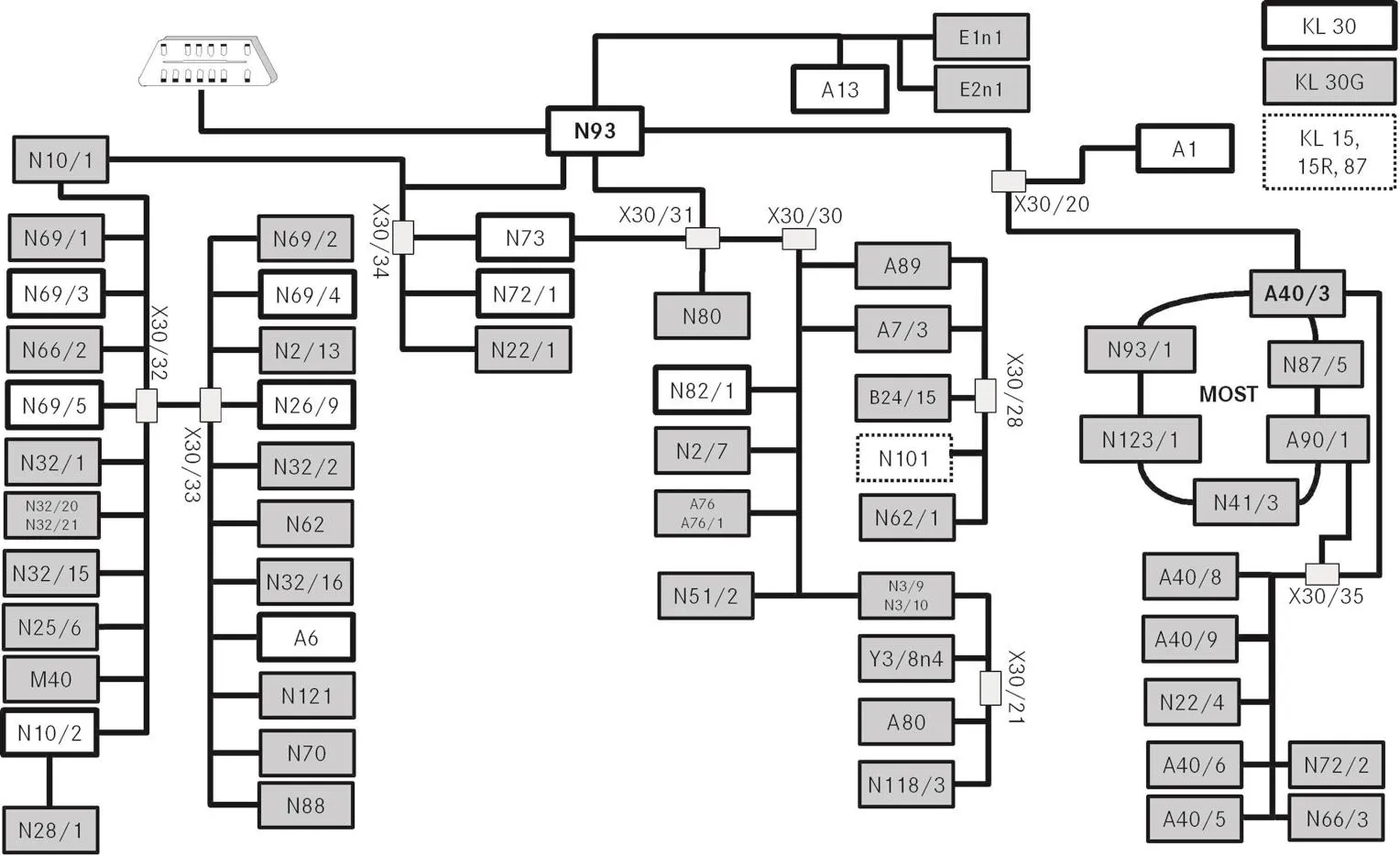
圖3 CAN網絡系統拓撲結構原理圖
(待續)
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
