高精度機(jī)械零件外觀三維設(shè)計(jì)
2018-12-03 03:49:00崔暢,劉萍
機(jī)械設(shè)計(jì)與制造工程 2018年11期
崔 暢,劉 萍
(西安工業(yè)大學(xué)藝術(shù)與傳媒學(xué)院,陜西 西安 710032)
機(jī)械零件是構(gòu)成機(jī)械的基本元件。隨著機(jī)械制造業(yè)的飛速發(fā)展,如何才能制造出高精度的機(jī)械零件已成為人們研究的重點(diǎn),其中機(jī)械零件的外觀設(shè)計(jì)是體現(xiàn)零件精度高低的一個(gè)重要因素[1-2]。但在實(shí)際生產(chǎn)過程中,廠商往往容易忽略對(duì)高精度機(jī)械零件的外觀進(jìn)行精心設(shè)計(jì),導(dǎo)致許多機(jī)械零件在外觀設(shè)計(jì)方面無法滿足客戶的需求。三維設(shè)計(jì)技術(shù)廣泛應(yīng)用于多個(gè)領(lǐng)域,可實(shí)現(xiàn)多專業(yè)的協(xié)同設(shè)計(jì)理念,已成為一種常用的機(jī)械零件設(shè)計(jì)技術(shù)。相關(guān)專家學(xué)者以機(jī)械零件外觀為對(duì)象進(jìn)行了深入研究,已取得了一些成果[3]。文獻(xiàn)[4]首先對(duì)零件圖像的邊界信息進(jìn)行提取,并給出了零件尺寸計(jì)算方法,然后通過構(gòu)建零件外觀圖像,對(duì)復(fù)雜機(jī)械零件的外觀設(shè)計(jì)尺寸進(jìn)行檢測(cè),實(shí)驗(yàn)結(jié)果表明,復(fù)雜機(jī)械零件的外觀尺寸檢測(cè)性能較好,但零件外觀的尺寸比例控制效果較差,需要不斷調(diào)整,從而導(dǎo)致設(shè)計(jì)周期較長(zhǎng);文獻(xiàn)[5]主要研究采用AutoCAD軟件設(shè)計(jì)的機(jī)械零件三維圖,具體研究過程中,選取方形體和旋轉(zhuǎn)體機(jī)械零件為研究主體,分別對(duì)兩種零件的幾何結(jié)構(gòu)特征進(jìn)行分析,根據(jù)各自特點(diǎn)選取最優(yōu)的外觀設(shè)計(jì)方法,該方法存在零件輪廓點(diǎn)位置計(jì)算不準(zhǔn)確的問題;文獻(xiàn)[6]以Visual Basic為編程語言,依據(jù)零部件結(jié)構(gòu)參數(shù)表對(duì)各參數(shù)進(jìn)行匹配、調(diào)節(jié),完成主要零件的三維參數(shù)設(shè)計(jì),該方法存在設(shè)計(jì)周期較長(zhǎng)的問題。針對(duì)上述存在的問題,筆者提出一種新型高精度機(jī)械零件外觀三維設(shè)計(jì)方法,通過構(gòu)建機(jī)械零件外觀結(jié)構(gòu)的三維模型,實(shí)現(xiàn)零件外觀設(shè)計(jì)。
1 高精度機(jī)械零件外觀結(jié)構(gòu)面動(dòng)力學(xué)分析
在機(jī)械零件最初設(shè)計(jì)前準(zhǔn)備階段,需要收集并處理相關(guān)材料,正確預(yù)計(jì)機(jī)械零件在設(shè)計(jì)過程中將要利用到的性能因素。高精度機(jī)械零件多用于精密儀器設(shè)備,因此必須具備較高的動(dòng)剛度。動(dòng)剛度是機(jī)械零件設(shè)計(jì)成功與否的一個(gè)重要影響因素,對(duì)于研究與解決機(jī)械零件動(dòng)態(tài)設(shè)計(jì)問題是極為重要的[7]。正確的動(dòng)力性能分析是進(jìn)行機(jī)械零件外觀設(shè)計(jì)的關(guān)鍵,可有效提高機(jī)械零件外觀結(jié)構(gòu)優(yōu)化程度并縮短設(shè)計(jì)周期。本節(jié)主要針對(duì)高精度機(jī)械零件外觀結(jié)構(gòu)的動(dòng)力學(xué)特性進(jìn)行分析,即首先在分析機(jī)械零件外觀結(jié)構(gòu)特點(diǎn)的基礎(chǔ)上,構(gòu)建外觀結(jié)構(gòu)面動(dòng)力學(xué)模型,完成動(dòng)力學(xué)分析。
將機(jī)械零件外觀結(jié)構(gòu)看作是一個(gè)多自由度系統(tǒng),對(duì)這個(gè)多自由度系統(tǒng)進(jìn)行研究的過程中會(huì)產(chǎn)生一種固有振動(dòng),需要明確的是,這種狀態(tài)下的振動(dòng)不是真實(shí)意義上的振動(dòng),其表示的是系統(tǒng)在無外力干擾的情況下,可能產(chǎn)生的一種靜態(tài)的振動(dòng)集合。當(dāng)系統(tǒng)處于某一固有振動(dòng)狀態(tài)時(shí),在任何時(shí)刻各自由度的位移之比是保持不變的[8-9]。通常情況下多自由度系統(tǒng)應(yīng)該滿足無阻尼自由度振動(dòng)方程:
(A-λB)ω=0
(1)
式中:A為動(dòng)力變量;B為外觀結(jié)構(gòu)變量;λ為外觀結(jié)構(gòu)特征值;ω為外觀結(jié)構(gòu)特征系數(shù)。使式(1)獲得非零解的充分必要條件是非系數(shù)行列式的值為零,即:
|A-λB|=0
(2)
根據(jù)式(2)可獲得機(jī)械零件外觀結(jié)構(gòu)特征值λ。在獲取特征值的基礎(chǔ)上,即可對(duì)機(jī)械零件外觀結(jié)構(gòu)的動(dòng)力學(xué)特性進(jìn)行分析。
對(duì)高精度機(jī)械零件進(jìn)行動(dòng)力學(xué)特性分析時(shí),通常會(huì)用到有限元分析技術(shù),即將一個(gè)無窮多自由度的系統(tǒng)進(jìn)行離散化,轉(zhuǎn)化成為類似于多自由度的系統(tǒng),以便于研究[10-11]。機(jī)械零件的外觀結(jié)構(gòu)有限元分析模型如圖1所示。
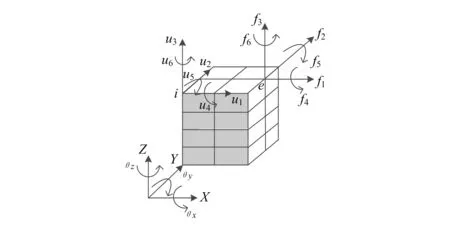
圖1 零件外觀結(jié)構(gòu)有限元分析模型
根據(jù)圖1所示的零件外觀結(jié)構(gòu)有限元分析模型,建立機(jī)械零件外觀結(jié)構(gòu)面的動(dòng)力學(xué)模型,具體步驟如下:首先選用合適的單元類型與機(jī)械零件外觀結(jié)構(gòu)各組成面進(jìn)行匹配,依據(jù)各自匹配得到的單元類型,建立其單元的動(dòng)力變量、外觀結(jié)構(gòu)變量矩陣,然后將所有單元矩陣組合起來得到零件的動(dòng)力變量、外觀結(jié)構(gòu)變量矩陣,從而構(gòu)建該零件外觀結(jié)構(gòu)的動(dòng)力學(xué)模型[12-13]。
假設(shè)u為零件外觀結(jié)構(gòu)面的節(jié)點(diǎn)位移量集合,u={u1,u2,u3,…,un},其中n為零件上的節(jié)點(diǎn)總數(shù);u1,u2,…,u6分別為節(jié)點(diǎn)在坐標(biāo)系X,Y,Z以及θx,θy,θz6個(gè)方向上的位移。由此可以得到節(jié)點(diǎn)所受的外載荷向量f(t):
f(t)=λ{(lán)f(t1)T,f(t2)T,f(t3)T,…,f(tn)T}
(3)
若節(jié)點(diǎn)處無外力作用,則f(t)=0。
假設(shè)動(dòng)力變量矩陣A和外觀結(jié)構(gòu)變量矩陣B均為n×n階對(duì)稱矩陣,則:
f(t)=AB(θx+θy+θz)
(4)
根據(jù)式(4)可得出高精度機(jī)械零件外觀結(jié)構(gòu)的動(dòng)力學(xué)模型W:
W=f(t)+u(A+B)
(5)
2 高精度機(jī)械零件外觀三維結(jié)構(gòu)設(shè)計(jì)模型
以前文中的零件外觀結(jié)構(gòu)動(dòng)力學(xué)分析為基礎(chǔ),對(duì)零件結(jié)構(gòu)的內(nèi)外輪廓點(diǎn)進(jìn)行計(jì)算,即可完成零件外觀三維模型的設(shè)計(jì)。
在從中性面模型轉(zhuǎn)換成實(shí)體模型的過程中,最重要的步驟是要確定外觀結(jié)構(gòu)面輪廓點(diǎn)的位置,通常情況下,會(huì)首先確定法向量位置,以此完成各個(gè)輪廓點(diǎn)的位置計(jì)算,圖2所示即為實(shí)體圖中的法向量。
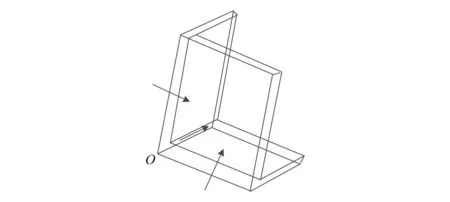
圖2 機(jī)械零件實(shí)體圖法向量
現(xiàn)有的利用法向量確定輪廓點(diǎn)的方法得到的結(jié)果雖然是正確的,但當(dāng)高精度機(jī)械零件外觀為“Z字形”、“凸字形”等不規(guī)則結(jié)構(gòu)的情況下,就無法利用法向量來確定整塊板的輪廓點(diǎn)[14-15]。
本文在現(xiàn)有法向量確定方法的基礎(chǔ)上進(jìn)行改進(jìn),采用浮動(dòng)法向量確定輪廓點(diǎn)。實(shí)際設(shè)計(jì)中,每一塊板上面的法向量都是不一樣的,且同一塊板上面擁有無數(shù)個(gè)點(diǎn),針對(duì)每一個(gè)點(diǎn)的法向量也是不同的,即板的基準(zhǔn)向量不是固定不變的。機(jī)械零件外觀結(jié)構(gòu)輪廓點(diǎn)確定的具體步驟:首先選取板上第一個(gè)點(diǎn)的法向量作為基準(zhǔn)向量,然后以基準(zhǔn)向量為依據(jù),對(duì)其他點(diǎn)的法向量進(jìn)行調(diào)整,同時(shí)內(nèi)外輪廓點(diǎn)也會(huì)隨之變化,最終確定輪廓點(diǎn)位置。如圖3所示,選取點(diǎn)1作為基準(zhǔn)向量,從圖中可以看出,點(diǎn)2,3,4的法向量與基準(zhǔn)向量不一致,需要進(jìn)行調(diào)整,相對(duì)應(yīng)的內(nèi)外輪廓點(diǎn)也會(huì)隨之調(diào)整,從而生成兩個(gè)側(cè)面的輪廓。

圖3 機(jī)械零件外觀結(jié)構(gòu)點(diǎn)向量
計(jì)算出所有的輪廓點(diǎn)后,即可得到零件外觀結(jié)構(gòu)三維模型,從而實(shí)現(xiàn)了高精度機(jī)械零件外觀的三維設(shè)計(jì)。具體流程圖如圖4所示。
3 實(shí)驗(yàn)測(cè)試與分析
為驗(yàn)證本文高精度機(jī)械零件外觀三維設(shè)計(jì)模型的有效性,進(jìn)行了仿真實(shí)驗(yàn)。首先在OMNet ++平臺(tái)上建立高精度機(jī)械零件外觀三維設(shè)計(jì)模型,然后利用仿真工具M(jìn)ATLAB 7對(duì)高精度機(jī)械零件外觀三維設(shè)計(jì)模型進(jìn)行測(cè)試。實(shí)驗(yàn)參數(shù)見表1。

圖4 機(jī)械零件外觀結(jié)構(gòu)三維模型設(shè)計(jì)流程
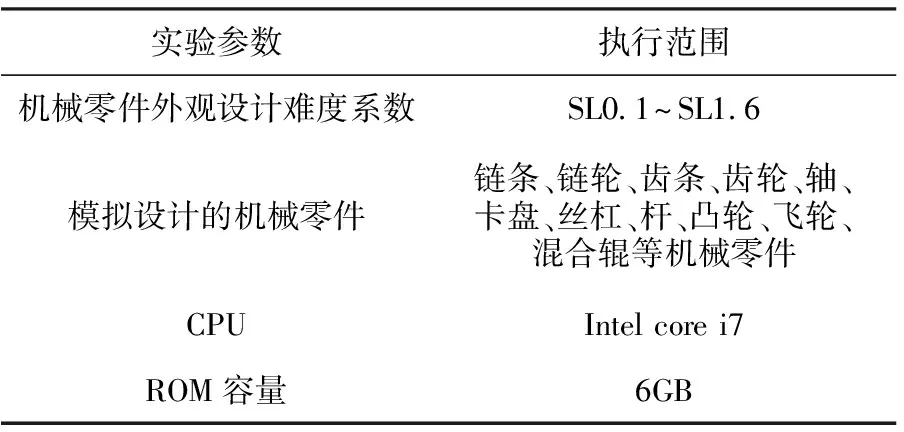
表1 實(shí)驗(yàn)參數(shù)設(shè)置
在上述實(shí)驗(yàn)環(huán)境和參數(shù)設(shè)置條件下,利用本文模型模擬得到的高精度機(jī)械零件三維結(jié)構(gòu)如圖5所示。

圖5 高精度機(jī)械零件三維結(jié)構(gòu)
以圖5中的機(jī)械零件為參照對(duì)象,選取設(shè)計(jì)周期為指標(biāo),對(duì)本文機(jī)械零件外觀三維設(shè)計(jì)方法、文獻(xiàn)[5]設(shè)計(jì)方法以及文獻(xiàn)[6]設(shè)計(jì)方法進(jìn)行對(duì)比,結(jié)果如圖6所示。
根據(jù)圖6可知,隨著零件數(shù)量的增加,本文方法的設(shè)計(jì)周期延長(zhǎng)速度較慢,且整體設(shè)計(jì)周期較短。而文獻(xiàn)[5]和文獻(xiàn)[6]的設(shè)計(jì)周期上升速度較快,整體設(shè)計(jì)周期較長(zhǎng)。由此可知,本文方法設(shè)計(jì)效率較高,能夠快速完成高精度機(jī)械零件的設(shè)計(jì)。
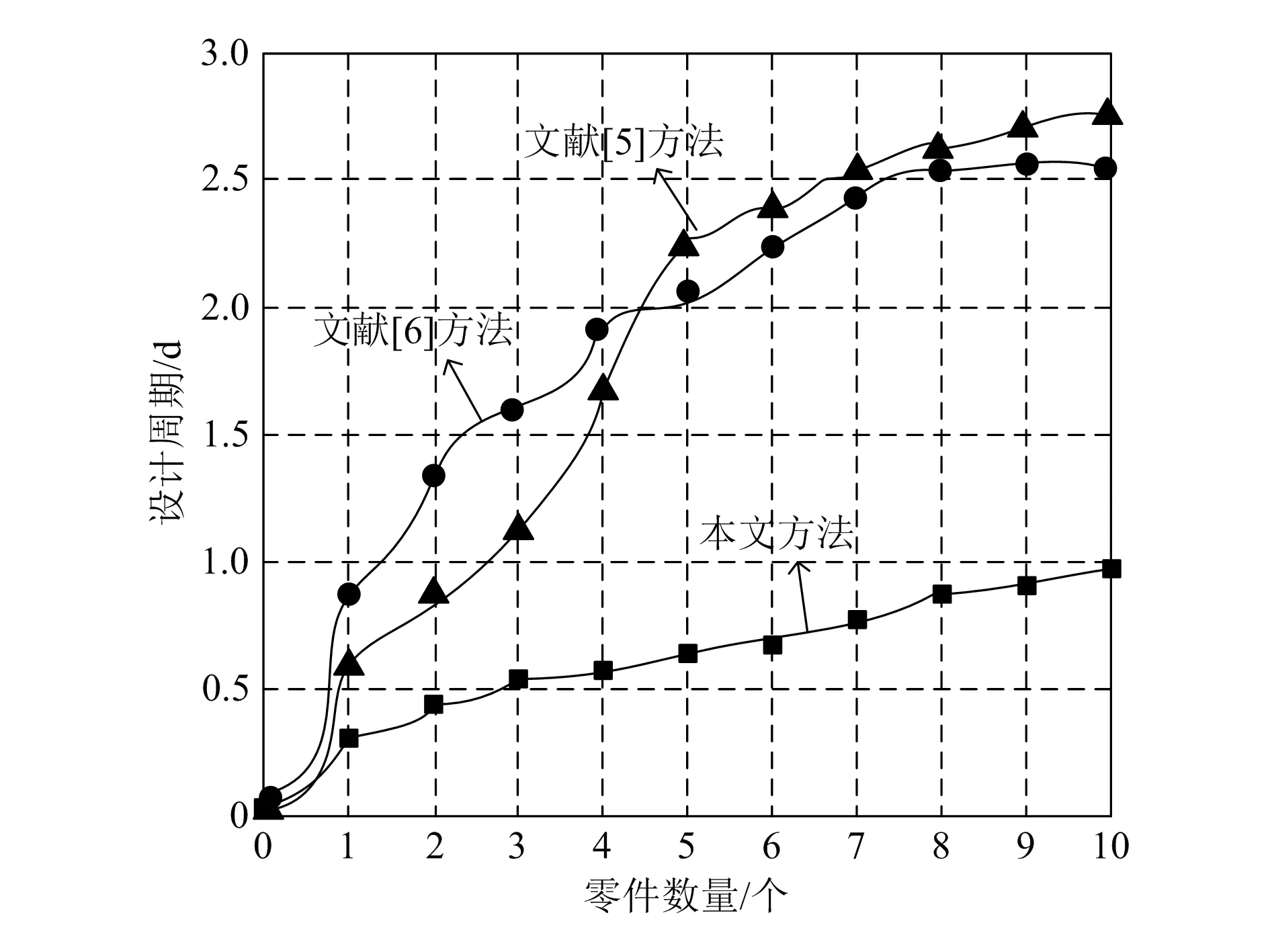
圖6 不同方法零件設(shè)計(jì)周期對(duì)比圖
為進(jìn)一步驗(yàn)證本文提出的高精度機(jī)械零件三維設(shè)計(jì)方法的可靠性,以機(jī)械零件內(nèi)外輪廓點(diǎn)位置計(jì)算值與實(shí)際值擬合程度為依據(jù),對(duì)本文方法與文獻(xiàn)[5]方法進(jìn)行對(duì)比,結(jié)果如圖7所示。
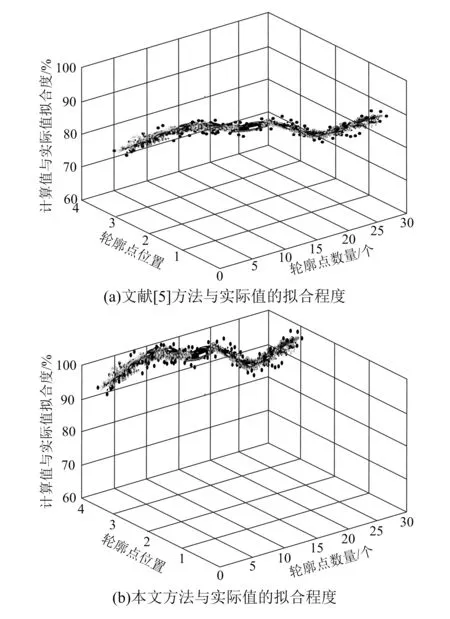
圖7 不同方法輪廓點(diǎn)位置計(jì)算值與實(shí)際值的擬合程度
根據(jù)圖7可知,用本文方法計(jì)算得到的輪廓點(diǎn)位置與實(shí)際值的擬合程度更高,表明本文設(shè)計(jì)得到的機(jī)械零件外觀結(jié)構(gòu)更加符合實(shí)際機(jī)械制造的需求。造成該結(jié)果的主要原因:本文在現(xiàn)有法向量確定方法的基礎(chǔ)上進(jìn)行改進(jìn),采用浮動(dòng)法向量,選取板上第一個(gè)點(diǎn)的法向量作為基準(zhǔn)向量,以基準(zhǔn)向量為依據(jù),不斷對(duì)法向量進(jìn)行調(diào)整,輪廓點(diǎn)位置也隨之發(fā)生調(diào)整,最終得到的位置更加接近實(shí)際位置。
4 結(jié)束語
本文通過對(duì)現(xiàn)有方法進(jìn)行改進(jìn),完成機(jī)械零件外觀的三維設(shè)計(jì),設(shè)計(jì)周期較短,設(shè)計(jì)效率高。但不同種類的機(jī)械零件具備不同特征,導(dǎo)致研究結(jié)果存在一定的局限性,因而后續(xù)工作將盡可能考慮不同種類機(jī)械零件的特征,以進(jìn)一步完善零件設(shè)計(jì)方法。
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
中國知識(shí)產(chǎn)權(quán)(2018年9期)2018-09-18 02:54:52
知識(shí)產(chǎn)權(quán)(2016年7期)2016-12-01 07:00:50
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
Coco薇(2016年2期)2016-03-22 02:42:52
中國陶瓷工業(yè)(2015年4期)2016-01-05 11:48:06
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
