風電葉片兩點疲勞試驗系統激振器加載控制
2018-12-04 08:27:02廖高華烏建中
同濟大學學報(自然科學版) 2018年11期
關鍵詞:系統
廖高華, 烏建中
(1.同濟大學 機械與能源工程學院,上海 201804;2.南昌工程學院 江西省精密驅動與控制重點實驗室,江西 南昌 330099)
風電葉片壽命直接影響風力發電成本,而葉片的使用壽命很大程度上取決于其抗疲勞性能,因此風電葉片的疲勞加載試驗至關重要[1].在國內風電葉片疲勞加載試驗主要采用單激振器,用于對疲勞安全系數較小的危險區域進行針對性測試[2].隨著風電葉片規模變大,使用單套加載裝置所產生的激振力不足以驅動大型葉片且試驗精度較低,因此多激振器加載形式應運而生[3].目前,丹麥LM (LM Glasfiber)公司、美國 NREL (National Renewable Energy Lab)和荷蘭WMC (Workflow Management Coalition)等對多軸加載和多點加載的方法進行了研究,并對風電葉片進行了疲勞試驗.多加載源系統振動過程存在能量傳遞,多加載源與風電葉片構成了一個復雜的非線性機電耦合系統,而機電耦合作用影響控制效果[4-5].同步控制是實現激振聯動的有效方式之一,在實際應用中激振頻率工作在共振情況下,同時各加載點間存在較強的機電耦合作用,從而影響同步控制的效果[6].為了提高了控制系統的自適應性和魯棒性,眾多學者提出了若干控制方法應用于風電葉片疲勞試驗.文獻[7]中提出了一套風輪葉片疲勞試驗線性控制系統,將非線性葉片振動模型通過輸出振幅的簡化等效為線性模型,使葉片以給定的幅值振動.廖高華等[8]設計了大型風電葉片加載試驗,并建立了模糊控制系統,試驗結果表明該系統應用于葉片加載試驗具有良好的控制精度.文獻[9]中采用并聯交叉耦合架構,設計了滑模變結構跟隨誤差同步控制算法,并將該控制算法應用于激振試驗.文獻[10]中論述了兩軸共振疲勞加載系統的基本結構和工作原理,設計了一套針對加載源的轉速差、相位差及葉片振幅測量方案,并制定了相應的控制策略.
上述研究主要基于偏心塊驅動或液壓驅動的加載模式,并且激振器控制策略主要采用交叉耦合控制策略和偏差耦合控制策略.然而,在受控激振器數量較多時,這些策略的控制結構也更加復雜,而且補償規律也難以確定.因此,本文基于電驅動慣性式激振裝置,構建了風電葉片兩點疲勞加載測試系統.提出虛擬主令同步控制算法,以比例-積分-微分(PID)算法設計誤差補償器,最后試驗驗證耦合下虛擬主令同步控制算法的有效性.虛擬主令同步控制算法基于無模型的控制方式,能降低系統控制結構的復雜程度并提高魯棒性.
1 葉片兩點疲勞加載試驗系統構建
系統由電驅動慣性式疲勞加載裝置、個人計算機(PC)人機軟件、就地控制柜、激光測距儀及應變儀等構成.葉片根部固定在加載基座上,兩點電驅動慣性式疲勞加載裝置通過木芯及夾具安裝于葉片展向不同位置,裝置距離根部分別為16 m和32 m.兩點疲勞加載試驗系統如圖1所示.系統測控模塊的上位機采用Labview設計人機界面環境,以實現參數設置與曲線顯示、控制器的數據驅動與存儲、激光測距儀的數據采集以及與各模塊的通信.下位機(就地控制柜)實現葉片共振頻率搜索與跟蹤,并與上位機通信以及同步控制激振器.試驗過程中對頻率、應變、位移等進行監控,葉片位移檢測采用LDS30系列激光測距儀.采用24組應變片,測量以下位置:葉根及葉根過渡段、剖面變化較大處,材料或厚度變化處,內部接合部、加強筋和梁.

圖1 葉片兩點疲勞加載試驗系統現場Fig.1 Site of two-point fatigue loading test system of the blade
在葉片展向不同位置上設置配重來調整載荷分布,得到各剖面所需的載荷.根據葉片特征參數建立模型,對載荷進行匹配,并設計彎矩分布校驗算法.對配重的質量和數量進行優化并校驗,得到沿葉片展向的彎矩分布誤差小于7%,滿足實際工作時彎矩分布.兩點疲勞加載試驗系統參數如表1所示.
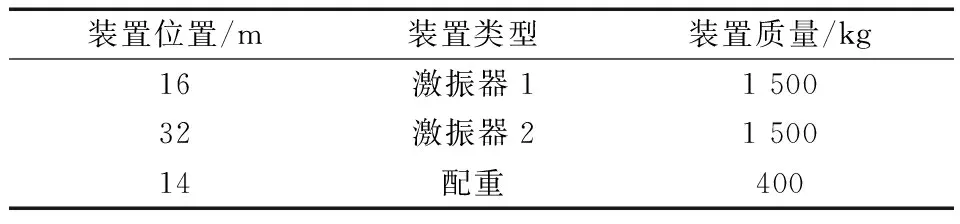
表1 兩點疲勞加載試驗系統參數Tab.1 Parameters of two-point fatigue loading test system
標準條件(激振器幾何尺寸、性能和結構等參數一致)下進行非控制振動特性試驗.設定激振器頻率同為6.35 rad·s-1,試驗曲線如圖2所示.從圖2可看出,相位差有趨于某個固定角度的趨勢,葉片振幅則表現為不同程度的波動,不能達到穩定狀態.這是由于2臺激振器聯振時存在耦合特性,導致相位差出現波動,因此葉片振動振幅發生紊亂.
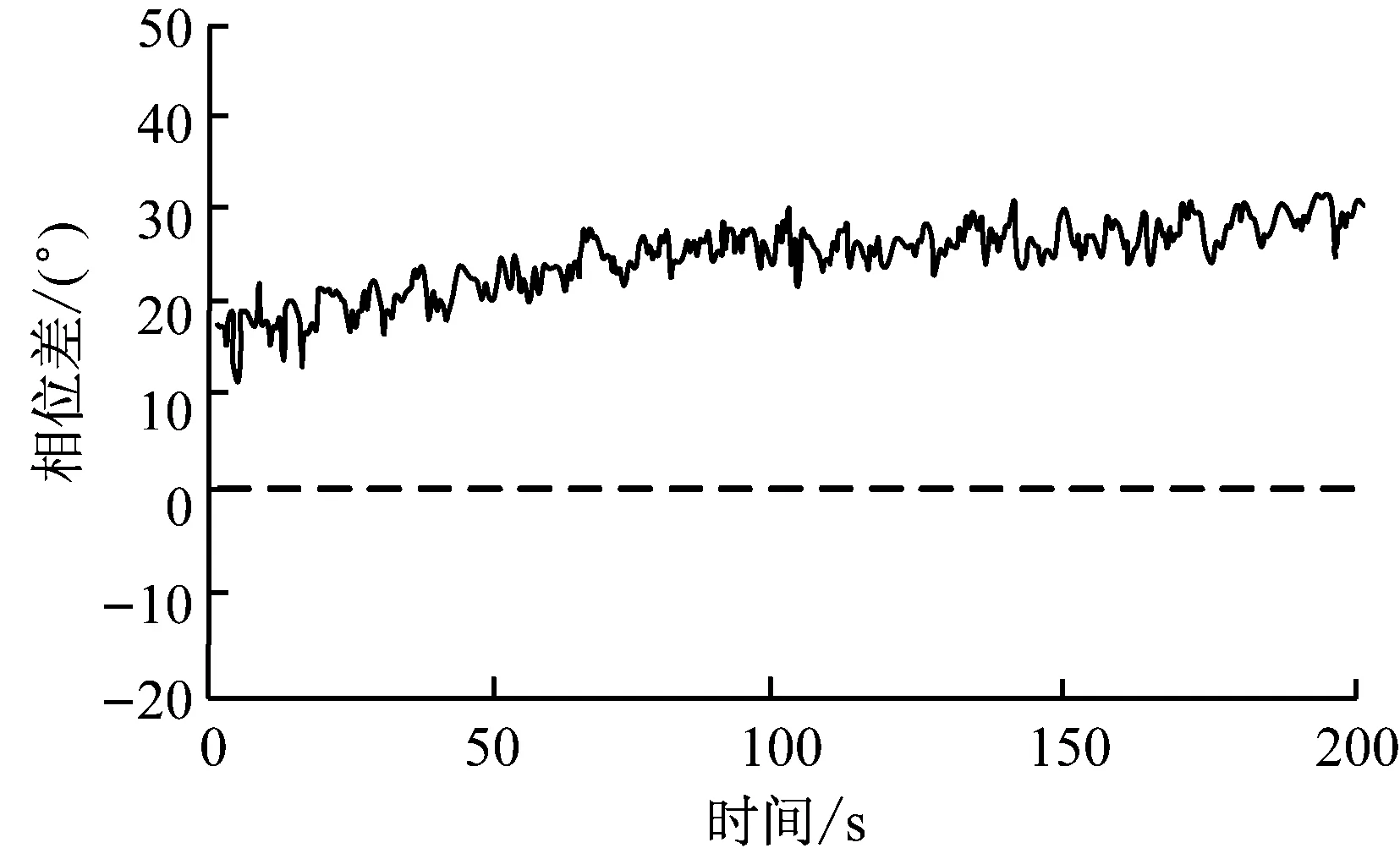
a 相位差曲線
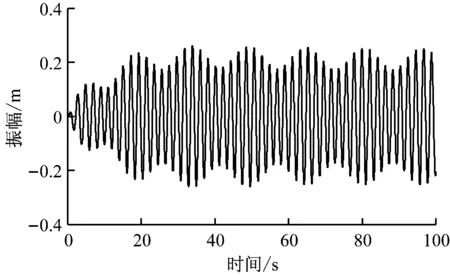
b 葉片振動曲線圖2 振動耦合特性試驗分析Fig.2 Experimental analysis of coupling characteristics of vibration
2 同步控制策略
為了消除振動耦合現象,需要設計一種同步控制策略以實現對激振系統的同步控制,從而提高疲勞試驗精度.根據運動控制器自身函數庫,引入交叉耦合同步結構,設計了虛擬主令相鄰耦合同步器.同步控制策略中,先模擬電子虛擬軸,使系統中每個電機都接受同一指令的信號,然后將相鄰偏差耦合引入控制器,最后用同步及跟隨誤差描述系統同步性能,同步控制算法使跟隨誤差趨于零.同步控制策略結構如圖3所示.

圖3 基于虛擬主令偏差耦合的同步控制策略結構
Fig.3Synthronizationcontrolstrategystructurebasedonvirtualmasterdeviationcoupling
對于具有n臺激振器的振動系統,設激振器都跟蹤同一基準位置θr,定義第i臺激振器的跟隨誤差ei(t)=θr-θi.滿足ei(t)=0可保證各旋轉軸與基準速度的同步,但由于電機特性差別及耦合的影響,在ei(t)→0的同時,需滿足e1(t)=e2(t)=…=en(t). 相鄰偏差耦合控制中最重要的部分就是位置反饋模塊,由它給每臺激振器提供位置補償信號.每個激振器同步誤差被定義為與其相鄰兩軸速度誤差的差分值,如下所示:
(1)
式中:εi為第i軸的位置同步誤差.當式(1)中所有的位置同步誤差都等于0,則同步控制目標e1(t)=e2(t)=…=en(t)得以實現.式(1)可進一步表示為
ε=Te
(2)
式中:ε=[ε1ε2…εn]T;T為同步變換矩陣;e=[e1e2…en]T.將式(2)左乘以eT可以得到
(3)
用跟隨誤差及同步誤差來描述系統位置同步性能,同步控制的目標是通過同步控制算法使跟隨誤差ei(t)與同步誤差εi(t)都趨于零.引入一個同時包含ei(t)、εi(i+1)(t)、εi(i-1)(t)的信息量Ei(t),稱之為相鄰耦合誤差.按相鄰次序定義Ei=ei+Λiεi,其中Λi為一個正的耦合系數,用于權衡控制器的跟蹤性能和同步性能.
引入新的變量耦合誤差,由E=e+Λε得到
E=(I+ΛT)e
(4)
式中:I表示單位矩陣;Λ表示控制增益矩陣,是一個對角正定矩陣.
3 同步控制算法及穩定性
控制系統整體結構如圖4所示.控制器以激振器的跟蹤誤差作為輸入,完成振子位移到電機轉角的參數轉換,以及對電機轉角指令的補償.假設電動缸參數相同,由交流電機磁場定向控制理論可知,系統狀態方程式的第i個運動學方程可表示如下:
(5)
式中:Ji為伺服結構等效轉動慣量;θi為電機位移;Ph為絲杠導程;iq為電機輸入交軸電流;Bi為等效摩擦系數;pn為電機極對數;Ψf為繞組的匝鏈永磁磁鏈值;Temi為電機磁轉矩;TLi為轉軸上承受的負載轉矩;Fsi為絲杠承受的負載力.

圖4 伺服控制結構框圖Fig.4 Servo control structure diagram
考慮兩點疲勞加載是一個多電機軸控制系統,軸參數為n,系統狀態方程(5)可改為以下形式:
(6)
由式(1)和式(4)可推導得到以下關系:

(7)
葉片疲勞加載試驗系統比例微分型同步控制律可以表示為
(8)
式中:T′為同步變換矩陣T的轉置且為正定陣;Kp、Kd和Ke為正定的控制增益矩陣.
考慮系統的穩定性,引入式(8)右側的第3項,并將式(8)代入式(6),得到的同步控制器可以表示為
(9)
定義正定標量函數為
(10)
如果控制增益矩陣Λ選擇得足夠小,式(10)函數是正定的,則對V關于時間t進行求導,可以得到
(11)

(12)
將式(12)代入(11),可得到

(13)
(14)

4 同步控制算法仿真分析
利用Matlab軟件建立電機矢量控制仿真模型,加入同步控制算法即可建立電機控制仿真模型.假設2臺電動缸參數完全相同,設定仿真參數為:額定功率18 kW,額定轉速3 000 r·min-1,電機轉動慣量Ji=0.8×10-3kg·m2,等效黏滯摩擦系數Bi=0.003 (N·s)·m-1,傳動部件轉動慣量JL=1.5 kg·m2.相關控制參數的取值為kp=36,ki=0,kd=19,Λ=0.5.圖5為PID控制器的跟蹤誤差.從圖5可以看出,本文所提出的同步跟蹤控制比標準跟蹤控制具有更好的同步性能.
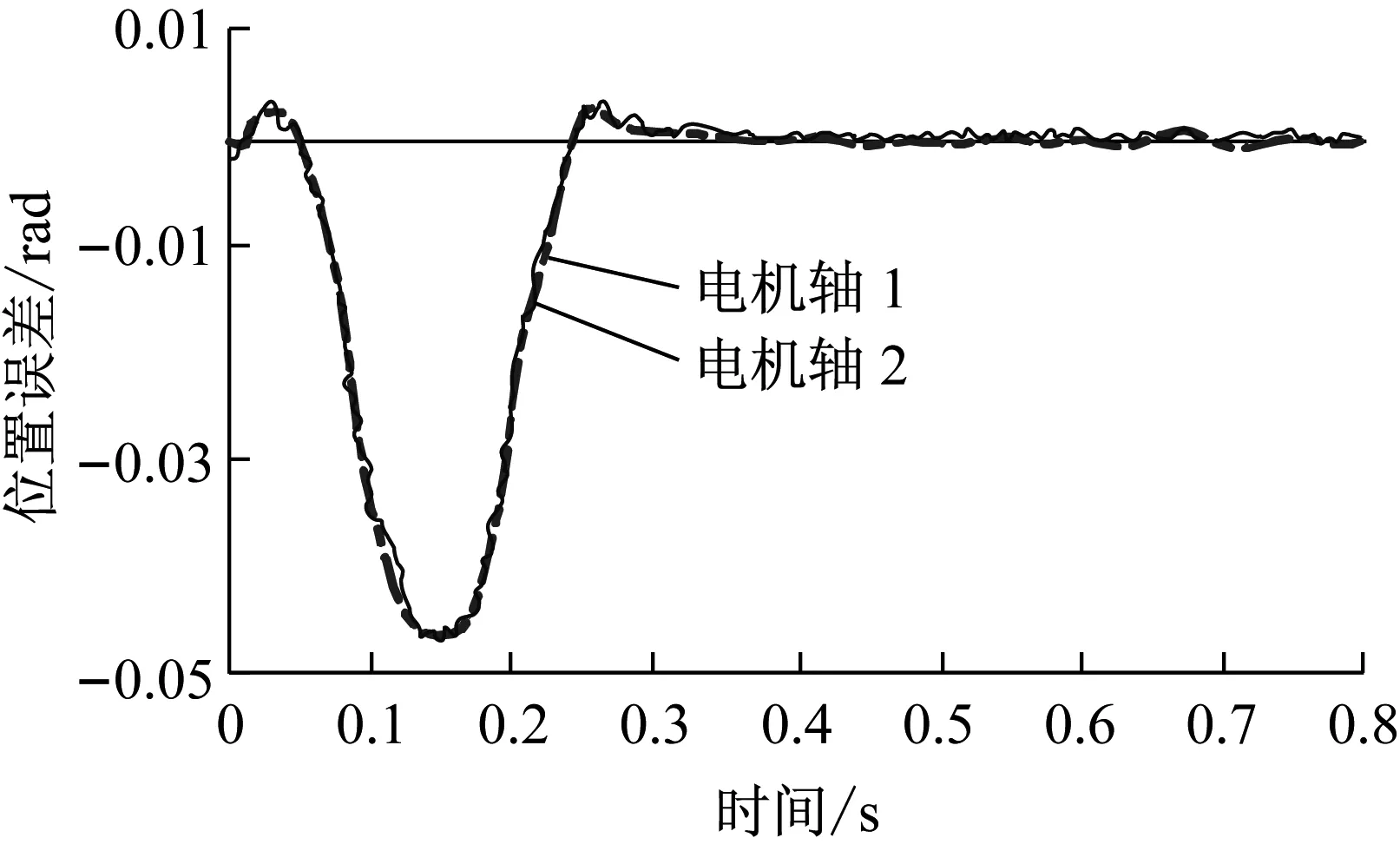
a 同步跟蹤控制

b 標準跟蹤控制圖5 PID控制器的跟蹤誤差Fig.5 Tracking error control of PID
為了驗證振動耦合下同步控制算法的有效性,在疲勞加載試驗系統機電耦合仿真模型中加入上述同步控制算法模塊,構成了機電耦合下的同步控制仿真模型.同步控制仿真模型如圖6所示.
基于同步控制的葉片振動系統模型仿真結果如圖7所示.從圖7a可以看出,同步控制能夠消除固定相位差,相位差收斂到零附近.虛擬主令同步控制算法響應時間快且超調量小,虛擬主令同步控制算法比標準控制算法更快速地完成相位追趕.從圖7b可以看出,在0.2 s時某作動器的相位受擾,虛擬主令同步控制算法在調整過程中相位波動較小,并能快速地恢復相位同步,抗干擾能力強于標準控制算法.
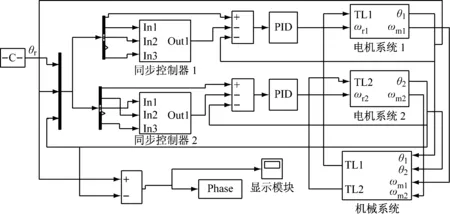
圖6 同步控制算法仿真模型Fig.6 Simulation model of synchronous control algorithm

a 同步控制過程
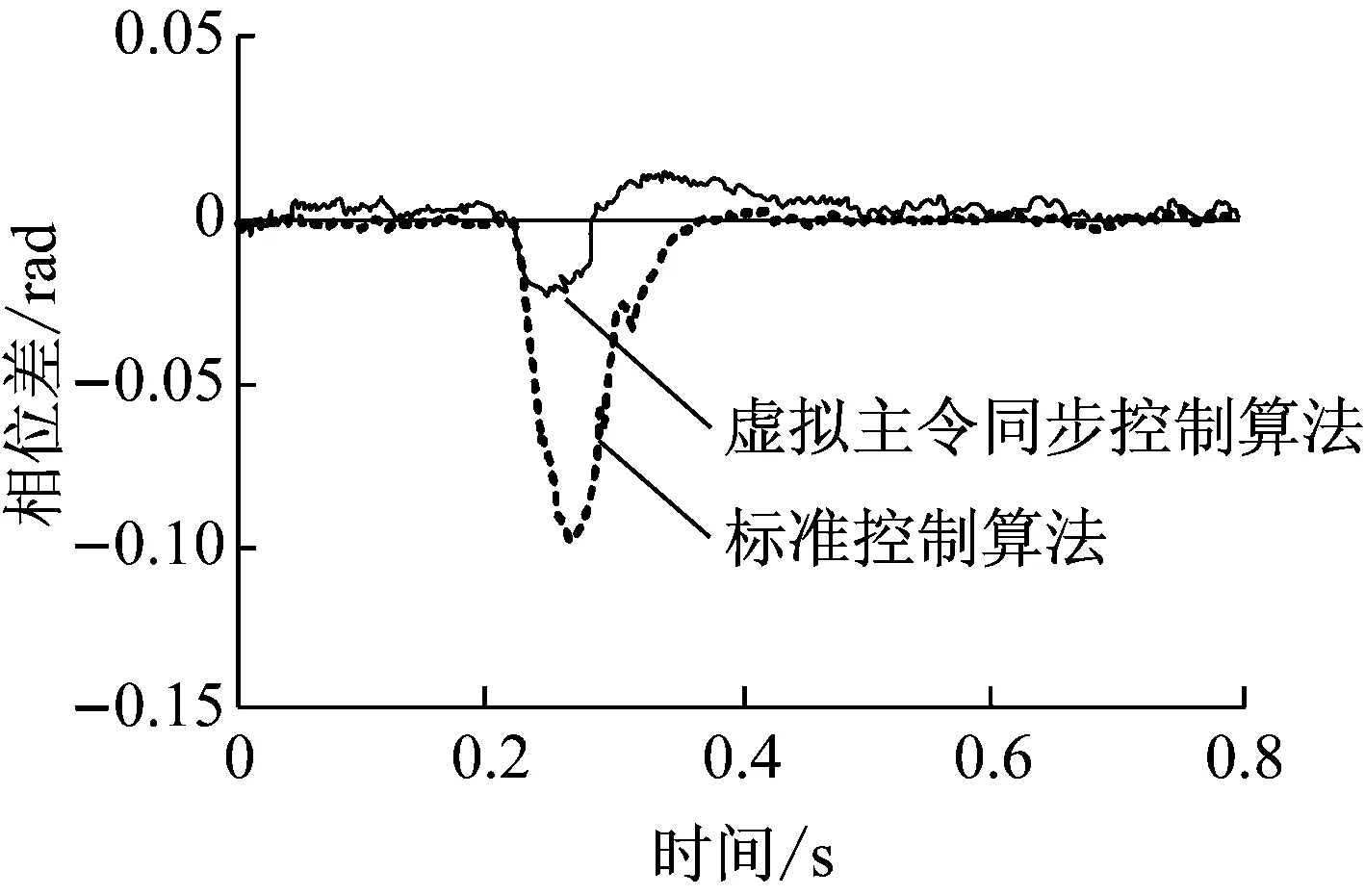
b 受擾后相位差圖7 葉片疲勞加載試驗系統同步控制算法仿真Fig.7 Synchronous control algorithm simulation of fatigue loading test system of the blade
5 試驗及分析
利用如圖1所示的兩點疲勞加載試驗系統對功率1.5 MW、長度40.3 m的風電葉片進行控制加載,試驗驗證本文所提出同步控制算法的控制效果.試驗環境溫度為20 ℃、濕度為30%,測試過程中對頻率、應變、位移等進行監控.應變片位置確定為監控關鍵截面,應變儀精度為0.3%.激光測距儀的分辨率為0.1 mm,測距為30 m.
圖8為在兩激振器頻率為6.35 rad·s-1時測量得到的激振器振子位移變化與相位差曲線.從圖8可看出,在近共振時同步控制下的相位差波動較小,其值約±4°左右.

a 同步位移
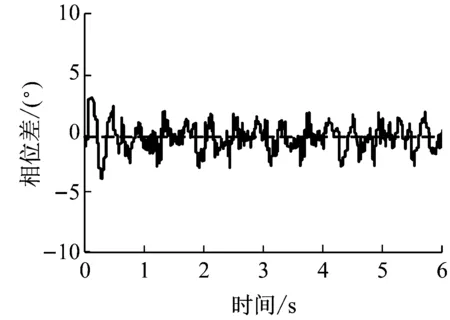
b 相位差圖8 激振器加載的控制結果Fig.8 Controlling results of excitation loading
葉片加載點32 m處振幅與時間的關系曲線如圖9所示.振幅隨著時間不斷增大,系統能很好地捕捉葉片共振點,逐步達到共振峰值后趨于穩定,葉片加載點穩定幅值約為0.3 m.

圖9 葉片振幅變化曲線Fig.9 Amplitude variation curve of the blade
在加載過程中,改變虛擬主令的頻率后得到相位差曲線,如圖10a所示.由于動力源-葉片響應的復雜性,因此相位差在同步過程中會有小波動,相位差在波動后迅速恢復同步.疲勞加載過程中受擾后激振頻率及相位差變化情況曲線如圖10b所示.從圖10b可以看出,在激振器電機受擾后,由于偏差補償作用,兩激振器的電機速度都會進行調整,保證出現較小的相位差波動.由試驗可知,利用本文提出的同步控制算法能實現相位差維持在零附近,實現了激振器的同步加載,具有較大的實用性及抗干擾能力.
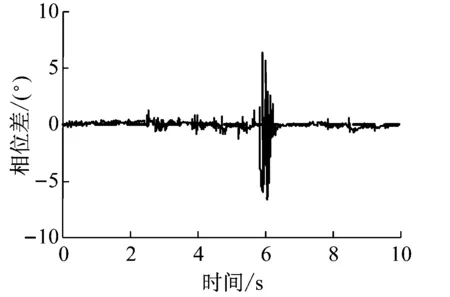
a 改變激振頻率后相位差
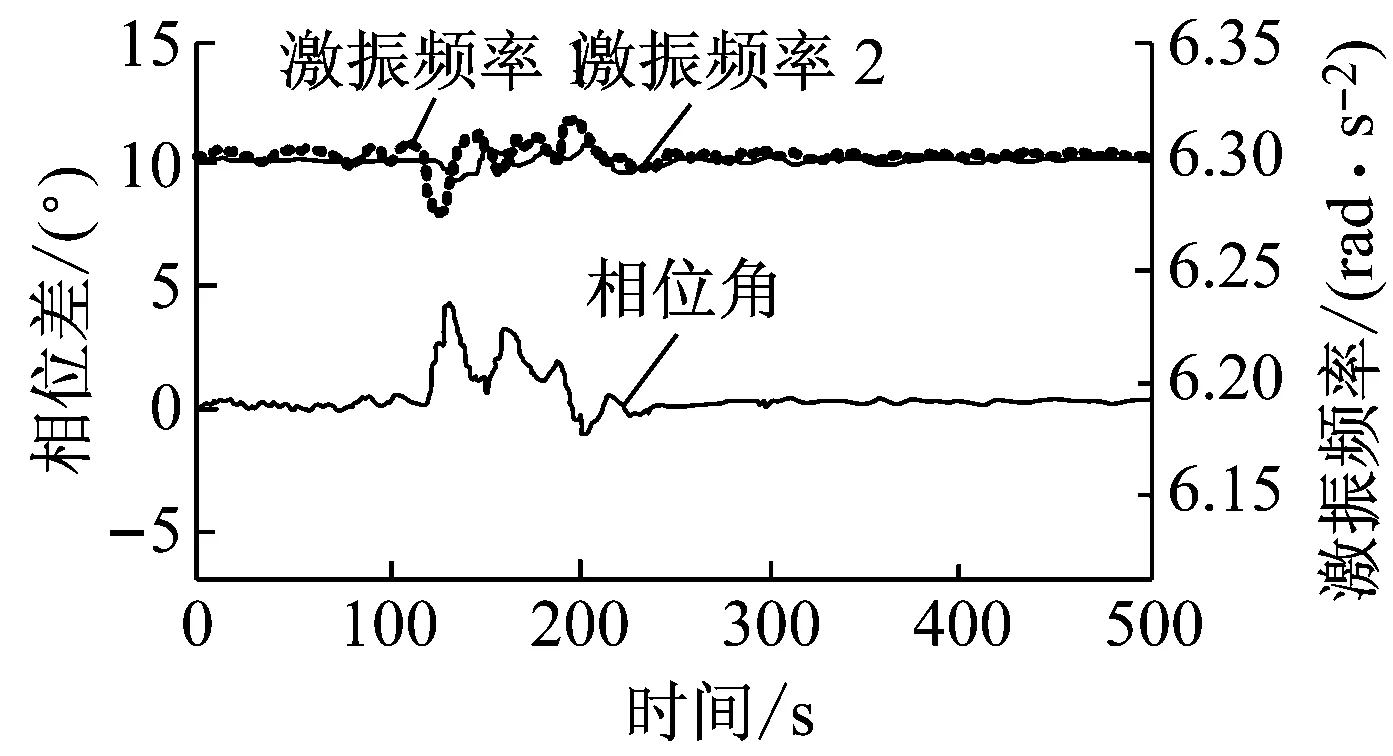
b 受擾后頻率及相位差圖10 頻率改變及受擾后控制曲線Fig.10 Control curve after frequency change and disturbance
6 結論
(1)基于電驅動慣性式激振裝置,配置葉片加載試驗系統參數,構建了兆瓦級風電葉片兩點疲勞加載試驗系統.振動試驗結果表明,激振器之間具有較強的力與能量傳遞,耦合同步傳動是機電耦合的結果,相位差會有趨于零或某個固定角度的趨勢.
(2)風電葉片加載過程中耦合效應影響2臺激振器的同步性,因此提出了虛擬主令同步控制算法.以PID算法設計誤差補償器,對同步控制算法的穩定收斂性進行了分析,并數值仿真驗證同步控制算法的有效性.本文提出的同步控制算法為一種無模型的耦合控制,實施簡單.
(3)同步控制算法的性能測試結果表明,2臺激振器均能快速跟隨并保持,耦合作用的固有相位差減小,加載時葉片振幅穩定,誤差在設定范圍內.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
