電動刀閘二次回路模塊化裝置設計與應用
2018-12-06 06:17:52國網江西電力有限公司撫州供電分公司運維檢修部余知敏徐瑋晨游宇堃
電子世界 2018年22期
國網江西電力有限公司撫州供電分公司 運維檢修部 余知敏 柳 濤 徐瑋晨 晏 斌 游宇堃
南京音視軟件有限公司 蔡 越
傳統電動刀閘二次回路裝置穩定性能較差,會造成母線停電導致不必要的安全隱患。為此設計電動刀閘二次回路模塊化裝置。基于電動刀閘二次回路模塊化裝置的工作原理,采用芯片為硬件設備和電能表檢測軟件,實現了智能充放電管理,保障了系統安全可靠的運行。從而完成了電動刀閘二次回路模塊化裝置設計。實驗結果表明,電動刀閘二次回路模塊化裝置設計擁有較高的穩定性。
引言:電動刀閘是需要變電站與斷路器相互搭配使用的一種設備。電動刀閘二次回路元器件較多,任何一個器件出現故障都將導致不能正常分合閘。傳統電動刀閘二次回路裝置性能較差,在檢修時如果刀閘手搖位置出現偏差,會導致母線停電造成不必要的安全隱患。為了避免上述的情況設計了電動刀閘二次回路模塊化裝置,該裝置的操作方法比較簡單,可以徹底檢查電動刀閘二次回路,做好事故前的安全保障,保證電網的安全運行。
1 電動刀閘二次回路模塊化裝置的工作原理
電動刀閘二次回路模塊化裝置系統主要是由電壓放線車和數字電能表脈沖無線發射端組合而成的,而電壓放線車包括交流和電能表。
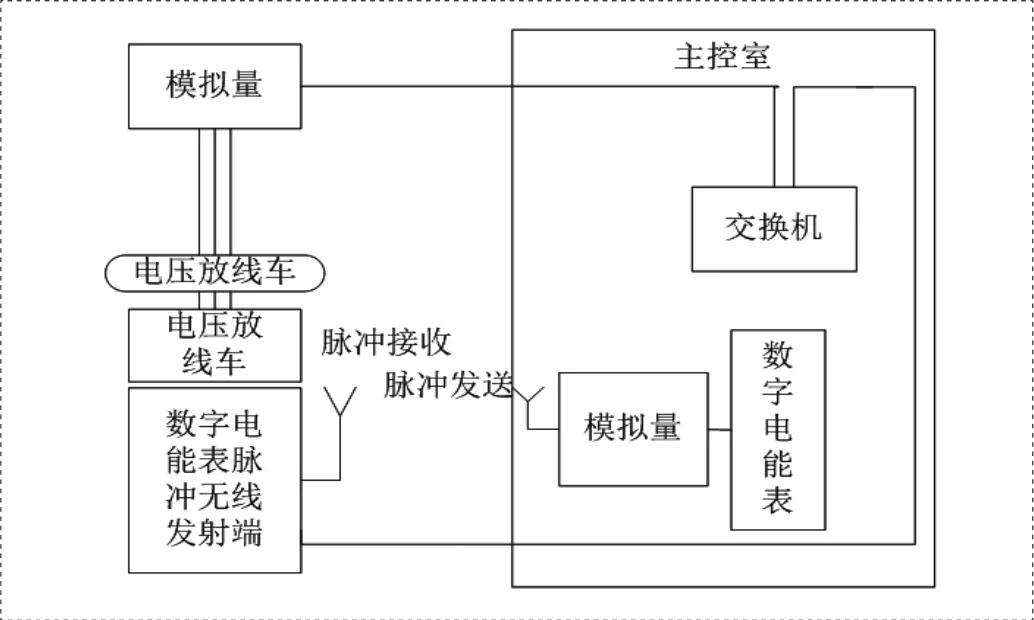
圖1 工作原理結構圖
圖1是電動刀閘二次回路模塊化裝置的工作原理,在進行測量時需要輸入交流的模擬量,提供相應的電流和電壓保證實驗誤差在預測的范圍內即可。電動放線車實現了交流模擬量輸入合并的功能,若檢測的電動刀閘二次回路模塊化裝置出現誤差值,脈沖信號會通過線車傳輸信號。若在傳輸的過程中出現短路,脈沖信號會通過二次回路模塊化裝置發送被測數字電能表的數據,從而得出計算的誤差值。當系統在離線的狀態下會測量出二次回路模塊化裝置的綜合誤差值。
2 電動刀閘二次回路模塊化裝置設計
2.1 硬件設計
傳統的電壓和電流采用數字處理器和線性電源的搭配方式,由于器件本身笨重使用起來很不方便,導致系統運行效率低,成本高,容易發生安全故障的問題。而數字電能表脈沖無線發射端主要由電能表和模擬源和人機交互模塊三個部分組成。該設備采用數字功率器代替傳統數字處理器和線性電源的搭配方式,改善器件笨重的缺點。電動刀閘二次回路模塊化裝置的硬件設計如下圖2所示。

圖2 電動刀閘二次回路模塊化裝置的硬件設計
圖2是電動刀閘二次回路模塊化裝置的硬件設計,電能表、模擬源和人機交互模塊的組成使裝置整體更輕便,更易攜帶。數字功率器先將交流的信號轉換為直流的信號,通過高速轉換調制出所需的信號。信號形成的輸出形成的波形會被濾波器濾除,只留下所需的低頻電壓電流信號。
運行程序主要為以下幾個步驟:第一步,當工作人員發現變電站運行出現故障,需要根據一次回路故障分析故障原因,在二次回路中設置信號系統恢復系統運行。系統出現故障時會發出信號,警示系統運行出現故障,即稱為警示信號。第二步,永久故障和瞬間故障信號均在中央顯示屏中,系統會根據動作性能進行分類,若中央顯示屏重復之前的動作表示系統出現故障需要重新設置系統參數。若中央顯示屏不重復之前的動作表示系統正常運作。第三步,在系統被啟動之后工作人員不要干擾系統正常運作,經過一段時間后系統會自行運作。
2.2 軟件設計
計算電動刀閘二次回路模塊化裝置的誤差值。經過調理分別將電壓和電流信號發送到數字轉換器中,計算出測量值結果會直接發送到顯示器。電壓功率的計算公式如下所示:

公式(1)中Nif為交流電壓值;if 為電壓值;M為平均功率;為周期。根據公式(1)計算出有效的電壓功率值。
經過編碼后利用電磁波信號發送到數字處理器計量二次回路模塊化裝置。在給無限發射端提供電源時可以采用鋰聚合物電池,避免在測試結果出現偏差。
3 實驗結論
為了研究電動刀閘二次回路模塊化裝置設計與應用的合理性,進行了如下實驗。
3.1 實驗步驟
實驗步驟如下所示;第一步,工作人員在觀察原理圖時需要根據繼電器的時間限制進行調整;第二步,打開系統的開關,觀察顯示屏的電壓表數值,若達到45V以上說明達到要求,表明信號電源處處于正常運作;第三步,按下顯示臺的永久故障按鈕,觀察事故信號的狀態;第四步,實驗結束,斷開電源。
3.2 實驗結果與分析
傳統方法是對上位機控制的斷路器合閘進行控制,并對重復動作的中央事故信號進行檢測,而提出的電動刀閘二次回路模塊化裝置設計方法可直接對各類的電器動作進行查看,查看其就地合閘和跳閘是否出現故障,并對中央顯示屏的信號回路進行檢測。針對二次回路模塊化裝置設計方法穩定性較強的說法,進行了實驗驗證。
分別對傳統方法和二次回路模塊化裝置設計方法的重復動作的中央事故信號進行檢測,結果如圖3所示。

圖3 兩種方法中央事故信號檢測結果
由圖3可知:傳統方法信號呈折線式變化趨勢,而二次回路模塊裝置設計方法呈曲線式變化趨勢,與實際信號變化趨勢相吻合。
實驗前工作人員需要掌握實驗的操作方法,重復動作的中央事故信號實驗會根據繼電器理解的每次動作進行分析。實驗中對比傳統電動刀閘二次回路裝置和電動刀閘二次回路模塊化裝置的穩定性實驗結果如圖4所示。
從圖4可以看出:當實驗次數為1時,采用傳統方法穩定效果為22%,而二次回路模塊化裝置設計方法穩定效果為78%;當實驗次數為5時,采用傳統方法穩定效果為30%,而二次回路模塊化裝置設計方法穩定效果為70%;當實驗次數為10時,采用傳統方法穩定效果為20%,而二次回路模塊化裝置設計方法穩定效果為68%。由此可知,電動刀閘二次回路模塊化裝置相比傳統電動刀閘二次回路裝置的穩定性更高,中央事故信號一直保持正常運行的狀態,證明此裝置設計有用較高的實用性。

圖4 兩種方法穩定效果對比分析
4 結束語
實驗中采用了兩種實驗方法證明電動刀閘二次回路模塊化裝置的有效性,分別為上位機控制的斷路器合閘實驗和重復動作的中央事故信號實驗。實驗結果表明電動刀閘二次回路模塊化裝置相比傳統電動刀閘二次回路裝置的穩定性更高。此方法具有較高的穩定性,可以保障系統正常運行。
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年5期)2020-05-30 13:01:56
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:50
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25