基于事件觸發的執行器飽和NCS容錯控制
2018-12-10 12:12:56尚秋冬趙立英白敬郭樹理
計算技術與自動化 2018年3期
尚秋冬 趙立英 白敬 郭樹理
摘 要:針對具有網絡時延和執行器部分故障的網絡化控制系統,考慮系統模型可能具有的參數不確定性以及未知擾動,研究執行器飽和時的穩定性問題。對網絡時延提出離散事件觸發機制,執行器部分故障采用故障矩陣方式,飽和項采取線性凸包法,由此推證出了閉環系統模型。構造Lyapunov 泛函,得出閉環系統在吸引域內達到穩定的充分必要條件,由此得到相應控制器的設計方法。利用仿真證明上述對系統的處理確實可以使系統達到漸近穩定,而事件觸發機制也確實可以減少數據量的傳輸。
關鍵詞:網絡化控制系統;執行器飽和;離散事件觸發機制;容錯控制
分類號:TP302.8 文獻標識碼:A
Abstract:A network control system with network delay and actuator failure is studied. Considering the uncertainties and unknown perturbations of the system model, the stability of the actuator is studied when the actuator is saturated. A discrete event triggering mechanism is proposed for the network delay. A faulty matrix method is used to solve the fault of the actuator. The closed - loop system model is taken by linear convex method. The Lyapunov functional is constructed and the sufficient and necessary conditions for the stability of the closed-loop system in the attracting domain are obtained. The design method of the corresponding controller is obtained. The simulation results show that the above-mentioned system can achieve the asymptotic stability of the system Mechanism can also reduce the amount of data transmission.
Key words:networked control system;actuator saturation;discrete event-triggered scheme;fault-tolerant control
1 引 言
實際控制系統中控制器大部分通過執行器驅動被控對象,但是在控制系統的穩定性問題上,人們過多的把目光集中在如何設計一個性能更好的控制器上。文獻[1]在執行器故障的基礎上設計了具有魯棒完整性的控制器,文獻[2]在系統存在未知擾動的前提下,設計了具有魯棒H∞性的控制器。這些文獻都沒有處理執行器飽和現象,忽略了執行器飽和帶來的穩定性問題,導致控制器性能也無法保證。意識到這個問題,學者們開始研究執行器飽和現象。
近年來,由于網絡化控制系統較傳統控制系統具有信息資源能夠共享、模塊化、分散控制、易于工程開發和維護以及低成本等優點,網絡控制系統執行器飽和問題備受關注。文獻[3]研究一類執行器飽和時滯系統的狀態反饋控制問題,文獻[4]考慮一類執行器飽合Hamilton網絡控制系統,考慮擾動及飽和因素,基于此設計系統的魯棒H∞控制器。網絡的存在使得系統產生時延與丟包現象,它們對系統的穩定性產生影響,這些文獻未考慮時延與丟包。基于此,在執行器飽和現象的基礎上考慮離散事件觸發機制,通過減少數據量傳輸緩解數據包丟失與時延現象,并且可以有效節省網絡資源。
大部分文獻或者忽略執行器飽和現象,或者忽略執行器可能發生的故障、時延丟包、系統參數不確定性以及外部擾動等問題。因此,保證系統在多個約束前提下仍能保持其漸近穩定性成為本文的重點。
在執行器飽和的網絡化控制系統的基礎上,考慮執行器部分失效,設計有關系統的容錯控制器。對于網絡帶寬有限及數據包傳輸量過大引起的數據包丟失和網絡時延等現象,考慮離散事件觸發機制,以減少數據量的傳輸,緩解時延及丟包現象。基于此,建立閉環系統模型,利用Lyapunov穩定性理論,在橢球域內,求解系統的容錯控制器,證明系統的魯棒完整性。
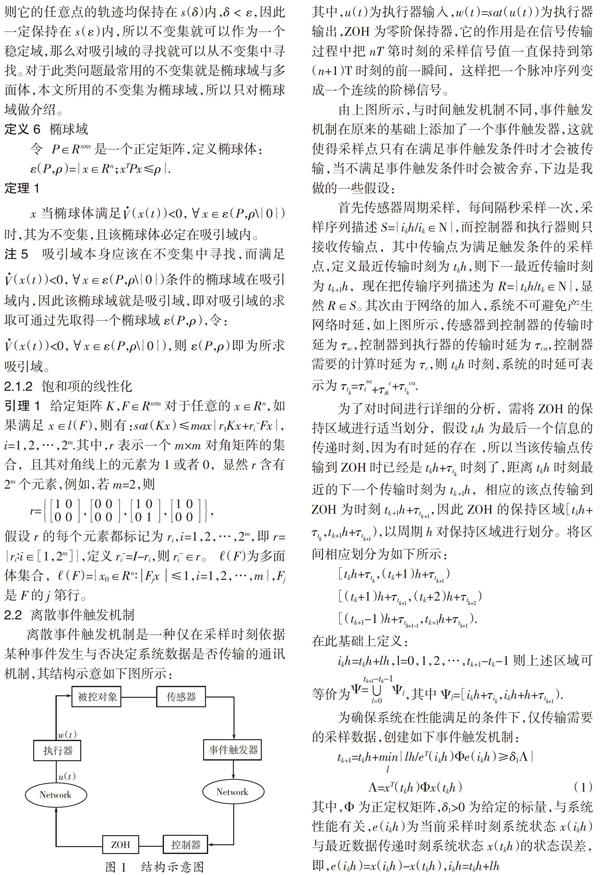
2 問題描述
2.1 執行器飽和
如圖3所示為該系統的信號圖,在30 s的時間內總共傳輸了64個數據包,傳輸率為21.3%,大大減少了數據量的傳輸,較時間觸發通訊機制而言,自然可以節約網絡通訊資源,這在一定程度上也有效的緩解數據傳輸通道的擁擠狀況,減少數據包丟失及網絡傳輸時延。
5 結 論
針對具有網絡時延和執行器部分故障的網絡化控制系統,研究當系統存在執行器飽和約束時的系統穩定性狀況,為了節約網絡資源,減少時延和數據包丟失,考慮離散事件觸發機制,為了研究系統的魯棒完整性,考慮故障矩陣,并利用線性凸包法處理飽和項,得到閉環系統模型,基于Lyapunov穩定性理論,構造Lyapunov泛函,利用相互凸原理等技術得到相應矩陣不等式,運用Matlab中的求解器得到具有魯棒完整性的控制器,最后通過仿真證明了結果的有效性。
參考文獻
[1] 李煒,趙莉,蔣棟年,等.基于事件觸發的NCS魯棒完整性設計[J].蘭州理工大學學報,2014,40(1)∶74—79.
[2] 賈新春,郝曉蕾,張大偉.事件觸發通訊制下線性系統的網絡化動態輸出反饋控制[J].山西大學學報,2016,39(2)∶170—180.
[3] 姚和軍,袁野,喬
[4] 洪曉芳,王玉振,魏愛榮.一類執行器飽和非線性Hamilton網絡控制H∞系統控制器設計[J].山東大學學報,2014,44(1)∶49—56.
[5] 曹德勝,賈海龍.隨機長時延網絡控制系統穩定與鎮定仿真分析[J].計算機仿真,2014,31(3)∶328—331.
[6] CHEN D,LI S,SHI Y. The practical stabilization for a class of networked systems with actuator saturation and input additive isturbances[J]. Mathematical Problems in Engineering,2012, 2012(2)∶1—19.
[7] ZHANG J,CHEN P. Synchronization of master-slave neural networks with a decentralized event-triggered commun-ication scheme[J]. Neurocom-putting,2016,173(P3)∶1824—1831.
[8] 李金娜,張慶靈,韓世遷.具有飽和非線性約束的網絡控制系統魯棒H∞ 優化控制[J].東北大學學報:自然科學版,2008,29(5)∶617—620.
[9] HU S,YIN X,ZHANG Y,et al. Event-triggered guaranteed cost control for uncertain discrete-time networked control systems with time-varying transmission delays[J]. Let Control Theory& Applications,2012,6(18)∶2793—2804.
[10] 俞立.魯棒控制——線性矩陣不等式[M].北京:清華大學出版社,2002.
[11] GAO H,CHEN T. Estimation for uncertain systems with limited commun-ication capacity [J]. IEEE Transactions on Automatic Control,2007,52(11)∶2070—2084.
[12] JIANG X,HAN Q L,LIU S,et al. A newstabilization criterion for networked control systems[J]. IEEE Transactions on Automatic Control,2008,53(4):1025—1032.
[13] ZHANG W A,LI Y. A robust control approach to stabilization of networked control systems with time-varying delays[J]. Automatica,2009,45(10): 2440—2445.
[14] PARK P,KO J W,JEONG Chang-ki. Reciprocally convex approach to stability of systems with time-varying delay[J].Automatic,2012,47(1):235—238.
[15] CHEN P,ZHANG J. Event-triggered output-feedbackcontrol for Networked control systems with time-varying sampling[J]. IEL Control Theory Appl,2015,9(9):1384—1391.
[16] JIA X C,CHI X B,HAN Q L,et al. Event-triggered fuzzycontrol for a classnonlinear networked control systems using the deviation bounds of asynchronous normalized membership functions[J]. Inf. Sci. 2014,259:100—117.
[17] MENG X Y,CHEN T W. Event based agreement protocols for multi-agent Networks[J].Automatical,2013,49(7):2521—2132.
