IP RAN中時鐘同步技術分析與比較
2018-12-18 09:25:44朱先飛宛傳東
互聯網天地 2018年9期
□ 文 朱先飛 宛傳東
1 引言
由于傳統的移動承載網絡有成本高、可獲取性差、帶寬資源有限等問題,在很大程度上限制了移動寬帶的發展。運營商迫切需要構建一種具備全場景支持能力、電信級、易維護、具備彈性能力的移動承載網,來滿足移動寬帶的各種需求,提升移動寬帶的可獲取性。IP RAN技術以其組網靈活、高容量、擴容性強、維護成本低及其高復用效率的特點,成為未來移動承載網的主流方案。[1]IP RAN方案基于靈活IP通信的設計理念,以傳統的路由器結構為基礎,其業務轉發推薦采用動態控制平面的自動路由機制。[2]
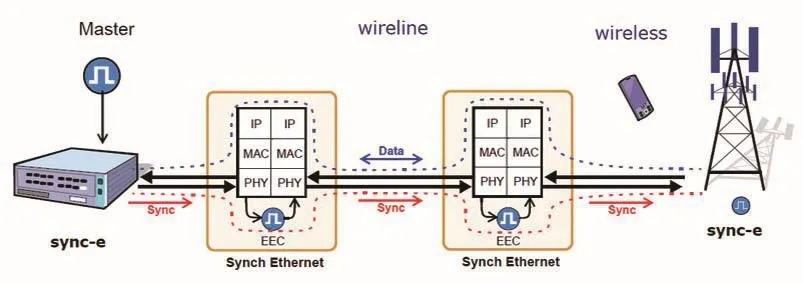
圖1 同步以太網技術時鐘信號傳輸示意圖
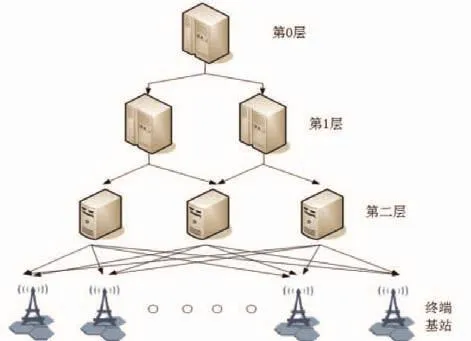
圖2 NTP拓撲圖
由于傳統的以太網使用的載波監聽多路訪問/沖突檢測(CSMA/CD)機制會引起通信的不確定性,為了消除這種不確定性,基于以太網通信技Positioning System全球衛星定位系統)來解決,而該方案存在成本和軍事上的風險。由于IP RAN是作為移動承載網,它既可用于異步基站,也可用于同步基站,所以要視其應用需求來確定使用何種同步技術,目前可用于IP RAN的時鐘同步技術包括同步以太、IP clock、IEEE 1588協議等。[4]
2 同步以太
術的通信協議要求采用基于確定性調度的通信機制。這些通信協議主要采用基于令牌傳遞或者基于時隙劃分兩種方法。但是無論是哪種方法,都需要對特定時間事件進行響應。因此必須引入時鐘同步技術,來完成對全網的控制調度。[3]
時鐘同步可以分為頻率同步和時間同步。基于頻分雙工的無線系統(如WCDMA),要求節點間的頻率同步。基于時分雙工的無線系統(如CDMA2000、TD-SCDMA和WiMAX),要求嚴格的時間同步來保證小區間的平滑切換。對于時間同步,目前只能通過GPS(Global
同步以太網(Synchronous Ethernet,由ITU-T Q13/SG15制定的同步以太方案又稱Sync-E)是一種采用以太網物理層傳送時鐘信號的技術,其標準由國際電聯制定。該時鐘信號由一個可追溯的外部精確時鐘源提供。時鐘源和基站之間通過以太網傳送時鐘信號的示意圖如圖1所示。其中EEC代表Synchronous Ethernet Equipment Clock(同步以太設備時鐘)。在發送端主時鐘(Master clock)將高精度時鐘注入以太網的物理層(PHY)芯片,接收端的基站的PHY芯片可從數據碼流中提取這個時鐘,而不會損失精度,然后再根據該時鐘信號校準自己的時鐘。這就是同步以太網的基本原理。
同步以太設備可以設置成同步模式或者非同步模式,當設置為非同步模式時,它將不接收和發送同步信息,只有設置為同步模式,才會參與到整網同步的過程當中。不管是什么工作模式,都兼容IEEE802.3協議。
在以太網上傳輸時鐘,仿照SDH機制,可以將以太PHY恢復出的時鐘,送到時鐘板上進行處理,然后通過時鐘板將時鐘送到各個單板,用這個時鐘進行數據的發送。這樣上游時鐘與下游時鐘就產生級連的關系,實現了在以太網絡上時鐘同步的目標。與傳統的TDM/SDH網絡不同,以太網沒有帶外通道來傳輸時鐘信號,所以只能通過構造專用的SSM(Synchronous Status Message,同步狀態信息)報文的方式通告下游設備。該報文最早由ITU-T定義在SDH網上,用于標示同步源的質量等級(Quality Level,QL)。SSM的傳輸是通過ESMC(Ethernet Synchronization Messaging Channel,以太同步消息通道)來進行的。該通道是一個單向傳輸通道,使用IEEE 802.3 Organization Specific Slow Protocol(OSSP)進行傳輸。OSSP是一個連接協議,ESMC幀不能在以太網節點透明傳輸。節點接收到一個ESMC幀之后傳輸就終止了,不能進行轉發,而要創建一個新的ESMC幀再發送出去。
ESMC有兩種消息類型,事件消息和信息消息。事件消息只有當時鐘源的QL發生變化時才進行發送,攜帶有新的QL。信息消息每秒都在發送,攜帶的是時鐘源的相關信息,包括源ID,從源到目前所在路由器的跳數等等。如果五秒內沒有收到任何一個ESMC消息,則表示QL值失效。[5]
同步以太的優點是時鐘同步質量接近SDH,完全滿足IP RAN時鐘指標,不受PSN網絡影響,是最可靠的頻率傳送方式。但也有明顯的局限性,如需要全網部署,不支持時間同步,而且存在兼容性問題。
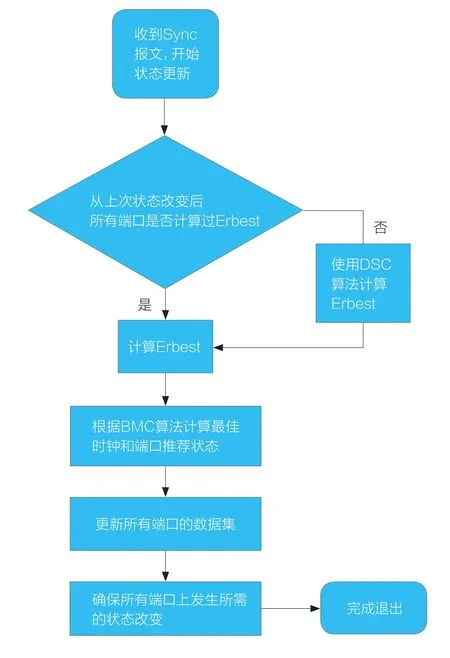
圖3 1588v2時鐘狀態改變算法流程圖
3.IP clock
IP clock是使用NTP(Network Time Protocol,網絡時間協議)來進行時鐘同步的一類產品的統稱。每個時鐘都可以作為轉發器,把自己的時鐘信號轉發給其它計算機。它采用自組織的方式,分布式子網內的時間服務器可以經過有線或無線的方式同步子網內的邏輯時鐘達到標準時間。
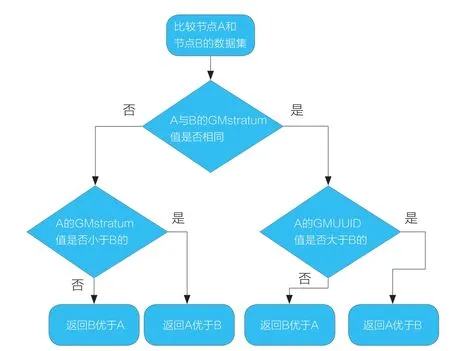
圖4 數據集比較算法流程圖
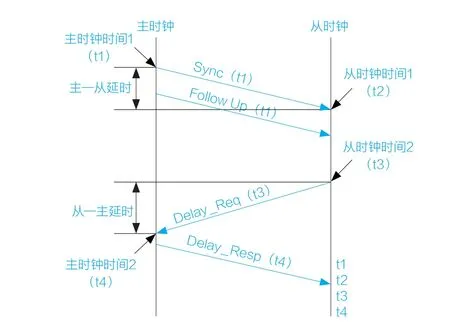
圖5 主從時間同步機制
區別于其它類似服務,NTP提供了層(stratum)的概念,用于時鐘的選擇和精確的補償措施用于自身的時鐘頻率誤差校正。層的號碼表示服務器的精確度,從0到15精確度逐步降低。NTP拓撲圖如圖2所示,其中第0層獲得外部時鐘源,通常是高精度原子鐘、天文臺、衛星。然后第1層從第0層獲取時間,第2層從第1層獲取時間,以此類推。NTP非常高效,在任意兩個網絡設備之間維持毫秒級的時間誤差,僅需傳輸一個數據包。該數據包會包含NTP服務器到NTP終端用戶之間的時間延遲,里面的時間延遲信息會根據當前網絡的吞吐量通過統計學的算法進行調整。[6]
為了提供免費的時間同步服務,Adrian von Bidder成立了一個名為“NTP共享計劃(NTP Pool Project)”志愿組織。該組織提供NTP服務器,并且聯合了多個不同的時鐘源設備,使得該計劃成為一個成功的計劃。該計劃的主要內容是通過設置域名服務器(Domain Name Server,DNS),再根據地理位置劃分不同的子域。當一個終端向NTP服務器發起請求,DNS服務器會向其提供本地NTP服務器的IP地址。DNS服務器通過輪聽的方式,使得請求負載均勻地分布在各個本地NTP服務器。
現在市場上已經有許多成熟的IP clock產品,如Valcom和Bogen等等。它們可以使用IEEE802.3af協議進行供電或者使用電池。通過RJ-45接口接入以太網,兼容10M和100M基帶信號傳輸以太網網絡。[7]
IP clock的優點是部署簡單,成本較低,缺點是其準確度較低,特別是當基站端處于低層,有時不能滿足測量儀器和工業控制所需的準確度,而且和同步以太一樣,不支持時間同步。
4.1588v2協議
由于NTP無法滿足所需的準確度,2000年底網絡精密時鐘同步委員會成立,其后獲得IEEE儀器和測量委員會美國標準技術研究所(NIST)的支持,該委員會于2002年底起草了獲得IEEE標準委員會通過的IEEE 1588協議。IEEE 1588協議全稱為“網絡測量和控制系統的精密時鐘同步協議標準”。與NTP只用軟件進行時鐘同步不同,IEEE 1588既使用軟件,也同時使用軟硬件結合,來獲得更精確的時鐘同步。由于IEEE 1588一開始也不支持時間同步,所以IEEE組織對1588進行了重新修訂,并于2007年完成了版本2的修訂,稱為1588v2。IEEE1588協議借鑒了NTP技術,具有容易配置、快速收斂和節省帶寬等特點。它的主要原理是通過一個同步信號周期性地對網絡中的所有節點的時鐘進行同步校正,可以使基于以太網的分布式系統達到精確同步,也可應用與任何組播網絡中,完全可以滿足IP RAN對時鐘同步的要求。[8]
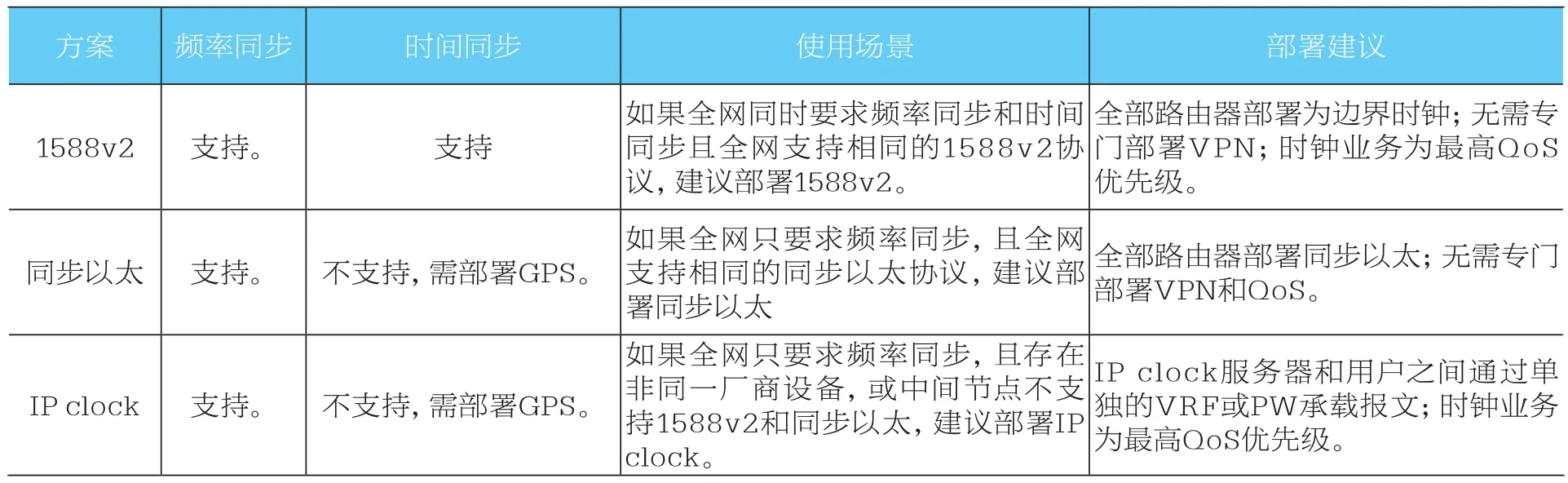
表1 不同時鐘同步方案比較
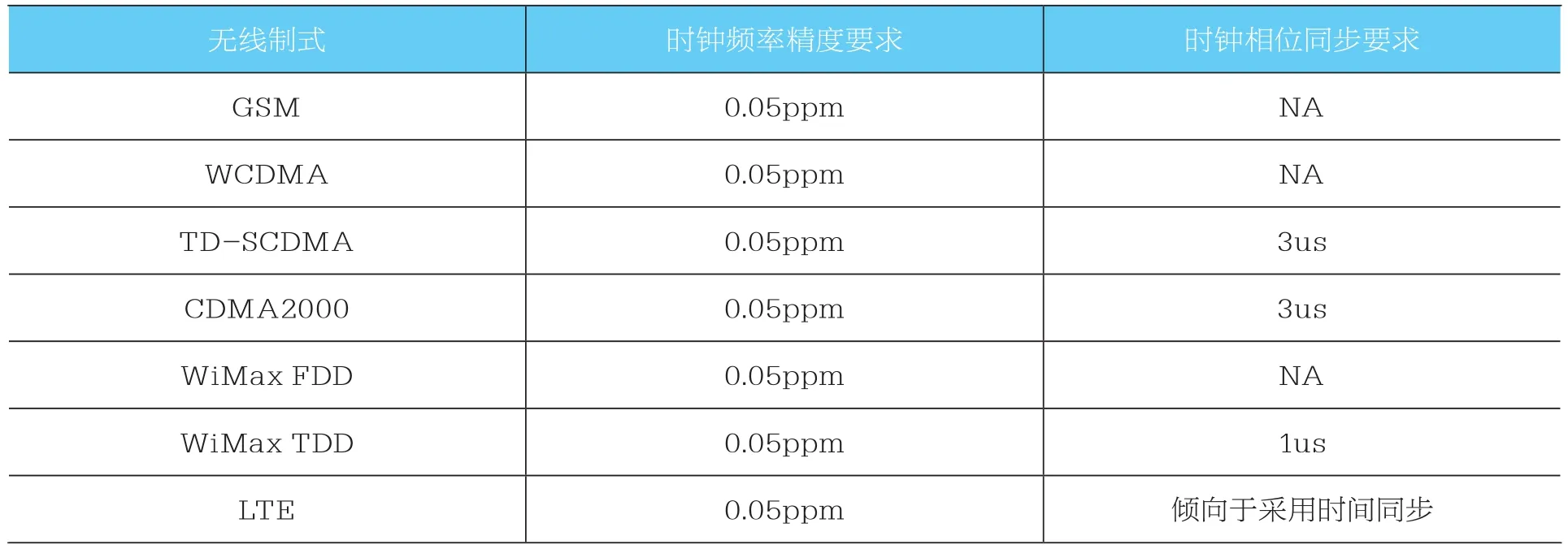
表2 不同無線制式對時鐘同步的要求
IEEE 1588v2協議的關鍵技術點有三個:BMC(最佳主時鐘)算法、主從同步原理、透明時鐘(TC)模型。1588v2采用握手的方式,利用精確的時間戳完成頻率和時間同步。
4.1 BMC算法
在IEEE 1588v2協議中,PTP時鐘的端口狀態被分為9種狀態。BMC算法的目的分為兩方面,從設備層面看就是確定當前端口處于什么狀態,然后根據接收到的sync報文,改變端口狀態。從網絡層面看,BMC算法還能夠比較兩個時鐘節點的數據集,從而找到超主時鐘(Grandmaster Clock),確定各個時鐘設備到達超主時鐘設備的路徑,避免環路。[9]相對應的,BMC算法可以分為兩部分,分別為狀態確定算法(State Decision(SD)algorithm)和數據集比較算法(Data Set Comparison(DSC)algorithm)。
4.1.1 狀態確定算法
使用BMC算法的時鐘狀態改變算法可以分為以下三步:①比較各個端口收到的報文中的時鐘優先級,取優先級最高的作為該端口的最優消息Erbest;②比較各個端口的Erbest的時鐘優先級,取優先級最高的作為該節點的最優消息Ebest(對于普通時鐘節點,因為只有一個端口,所以Ebest=Erbest);③每個端口根據自身的Erbest和該節點的Ebest和defaultsDS,通過BMC算法最終確定各個端口的主從狀態,從而確定整個域的主從體系。[10]時鐘狀態改變算法流程圖如下:
4.1.2 數據集比較算法
DSC算法的輸入值可以是時鐘節點的本地數據集,也可以是接收到的廣播報文中包含的對等信息;輸出值是兩個時鐘節點中精確度更高的那個,并作為超主時鐘的候選時鐘節點。DSC算法的算法流程圖如下圖所示。
4.2 主從同步機制
主從同步機制包括時間同步和頻率同步兩個部分。
4.2.1 主從時鐘時間同步機制
時鐘時間同步過程如下圖所示[11]:
主時鐘每兩秒給從時鐘發送Sync消息,Sync消息里面包含了時間戳t1。主時鐘也可能有選擇的發送Follow_up消息,其中包含有精確時間戳precision t1。從時鐘記錄Sync消息到達的時間t2,然后發送一個Delay_Req消息返回給主時鐘。Delay_Req消息攜帶有一個時間戳t3。主時鐘記錄下Delay_Req消息到達的時間t4。然后再發送Delay_Resp消息給從時鐘。從時鐘根據t1、t2、t3、t4,就可以計算出主時鐘到從時鐘的延遲和偏差,從而進行校準。延遲(delay)和偏差(offset)的計算公式如下:
delay=((t2-t1)+(t4-t3))/2
offset=((t2-t1)-(t4-t3))/2
4.2.2 主從時鐘頻率同步機制


主從時鐘頻率同步可以分為以下三個步驟:①記錄Sync消息出發時刻加上路徑延時,即到達從端口的修正時刻,再計算各個從端口修正時刻的時間間隔;②從根據各個從端口的入口時間戳計算時間間隔;③根據兩類時間間隔計算比例因子。
4.3 透明時鐘模型
在1588v1協議中,有兩類時鐘,分別是普通時鐘(Ordinary Clock,OC)和邊界時鐘(Boundary Clock,BC)。OC模型只能接收時鐘,用于整網時鐘源或時鐘宿,不能同時作為始端和終端。BC模型相當于中繼器,既可以恢復時鐘,又可以作為時鐘源往下游傳遞時鐘。
1588v2協議比v1增加了透明時鐘(Transparent Clock,TC),用于解決報文在中間節點駐留引起的延時問題。TC分為E2ETC(end-to-end)和P2PTC(peer-to-peer)兩種模式。E2ETC只計算設備內部時延,對兩端同步節點完全透明,鏈路延時由兩端節點計算,推薦鏈形網絡使用。P2PTC同時計算設備內部及鏈路時延,可以支持鏈路快速倒換,推薦MESH網絡使用。[12]
1588v2的優勢就在于它支持時間同步,而無需使用GPS,可以大大降低成本,運維更容易,減少安全隱患。下面給出以上三個時間同步方案的對比。
4.4 時間同步方案對比
下表列出了不同時鐘同步方案的使用場景和在IP RAN方案中的部署建議。
下表列出了不同無線制式對頻率和時間同步的要求:
綜上所述,同步以太協議部署最簡單,而IP clock的兼容性比較好,但是精度偏低,這兩者都不支持時間同步,無法滿足未來4G通信發展的要求。而1588v2可以同時支持頻率同步和時間同步,無需通過GPS,將成為未來4G通信使用的時鐘同步方案。
朱先飛 工程師,現任職于中國電信股份有限公司廣東研究院,主要從事物聯網通信、移動終端定位等研究
宛傳東 高級工程師,現任職于中國電信股份有限公司廣東研究院,主要從事物聯網通信技術方案、測試方法等研究。
5. 結束語
同步以太、IP clock、IEEE 1588v2協議都是比較成熟的時鐘同步方案,得到廣泛的應用。在IP RAN方案中,根據使用的無線制式,以上三種時鐘同步方案都滿足時鐘同步要求。本文詳細介紹了三種時鐘同步方案,并比較了三種方案的優缺點,對于IP RAN的實際部署有一定的指導作用。■
