基于虛擬阻抗的微電網離網狀態改進下垂控制
2018-12-26 07:42:48于佳文韓順杰張冬冬付香雪
長春工業大學學報 2018年6期
于佳文, 李 新, 韓順杰, 張冬冬, 付香雪
(長春工業大學 電氣與電子工程學院, 吉林 長春 130012)
0 引 言
在電力生產過程中,傳統發電廠產生的電能主要來源于汽油、煤炭和天然氣等不可再生資源。然而,隨著人們對電能需求的逐步增加,不可再生資源過度開采,導致了資源枯竭和環境的污染。因此,分布式發電這種可以充分開發利用可再生能源系統隨之產生。分布式發電對環境的污染較少,而且相對于傳統的電力生產,其電能的質量和供電可靠性也很高。但是分布式發電也存在著許多缺點和不足,比如成本高、控制相對困難等。對此,在20世紀初,國外的專家學者提出了微電網的概念[1]。微電網是由一個或多個分布式電源、能量轉換環節、負載、監控環節和系統保護環節組成的。它是一個既可以運行在并網狀態下,也可以運行在離網狀態下的小型電力系統[2]。
目前,微電網逆變器的控制方法主要分為三種,分別為PQ控制、VF控制和下垂控制。對于這三種控制方法,國內外專家學者們也做了大量的科學研究,并發表了大量的相關文獻。文獻[3-4]介紹了在離網狀態下使用主從控制,對一個分布式電源采用VF控制,對其他分布式電源采用PQ控制;文獻[5]在離網狀態下分析和驗證了VF控制方法的穩定性;文獻[6]針對離網狀態微電網的運行問題,提出了電壓頻率分區控制方法;文獻[7]針對微電網的離網運行,提出了逆變器的雙模式下垂控制。文中針對微電網離網運行時的特點,提出了基于虛擬阻抗的改進下垂控制策略,并采用Simulink進行仿真驗證。
1 傳統下垂控制
微電網的下垂控制本質上是對逆變器的控制,傳統下垂控制一般有兩種基本控制模式:一種是有功-頻率下垂控制(P-f)和無功-電壓下垂控制(Q-V);第二種是頻率-有功下垂控制(f-P)和電壓-無功下垂控制(V-Q)。以第一種下垂控制方法為例,其控制方式的基本思想為頻率參考值fref和電壓參考值Uref,分別為分布式電源輸出的有功功率P和無功功率Q的函數,換言之,就是功率決定頻率和電壓。其控制原理如圖1所示。
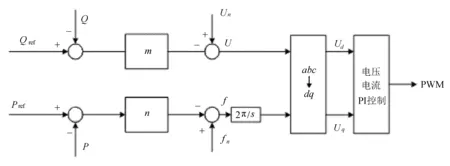
圖1P-f、Q-V下垂控制原理框圖
以第一種下垂控制方法為例,給定的頻率fn和電壓參考值Un來控制有功和無功的輸出,這一控制思想可以表示為:
(1)
在頻率下降過程中,下垂控制系統令分布式電源輸出的有功功率按照對應的下垂特性逐漸增大。同時由于受到頻率的影響,負荷功率也逐漸減小,系統最終達到新的穩定狀態,電壓下垂控制原理基本相同,如圖2所示。
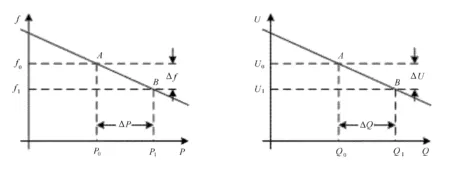
(a) 頻率下垂特性(b) 電壓下垂特性
圖2 下垂控制原理圖
傳統的下垂控制主要應用于高壓配電網絡,其線路主要是電感性的,線路的阻抗非常小,甚至可以忽略不計。但是,對于低壓微電網,其線路主要是電阻性的,阻抗值很大,并不能忽略。如果仍舊使用傳統的下垂控制方式對逆變器進行控制,可能會導致系統的不穩定,控制不準確并產生諧波分量。對此,文中提出了對系統逆變器采用虛擬阻抗的改進下垂控制來解決上述問題。
2 基于虛擬阻抗的改進下垂控制
針對傳統的下垂控制方法不能很好地應用于低壓微電網中的這一問題,并且在其控制過程中系統有功功率和無功功率之間存在強耦合。文中提出了兩種方法來應對這一問題。
2.1 改進的P-V、Q-f下垂控制
逆變器的等效電路如圖3所示。
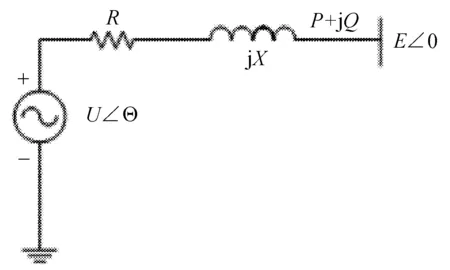
圖3 逆變器等效電路
系統總阻抗Z=R+jX,它包括逆變器的阻抗和輸電線路的阻抗。
在該系統中,有功功率和無功功率可以表示為:
(2)
低壓微電網運行過程中,線路中的電抗值很小,所以在推導過程中,忽略線路中電抗值的大小,僅計算線路中的電阻值。即電抗值X≈0,電阻值R不變。同時由于發電機的輸出功率角一般都非常小,因此在推導過程中,sinθ≈θ,cosθ≈1。將上述值代入式(2),并化簡為:
(3)
由式(3)可知,系統有功功率與電壓幅值之間存在函數關系,無功功率與角度之間存在函數關系。由此可知,改進的P-V、Q-f下垂控制方程可轉化為:
(4)
其控制原理和仿真模型分別如圖4和圖5所示。
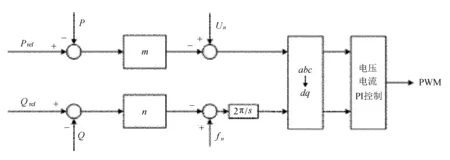
圖4 改進P-V、Q-f下垂控制原理圖
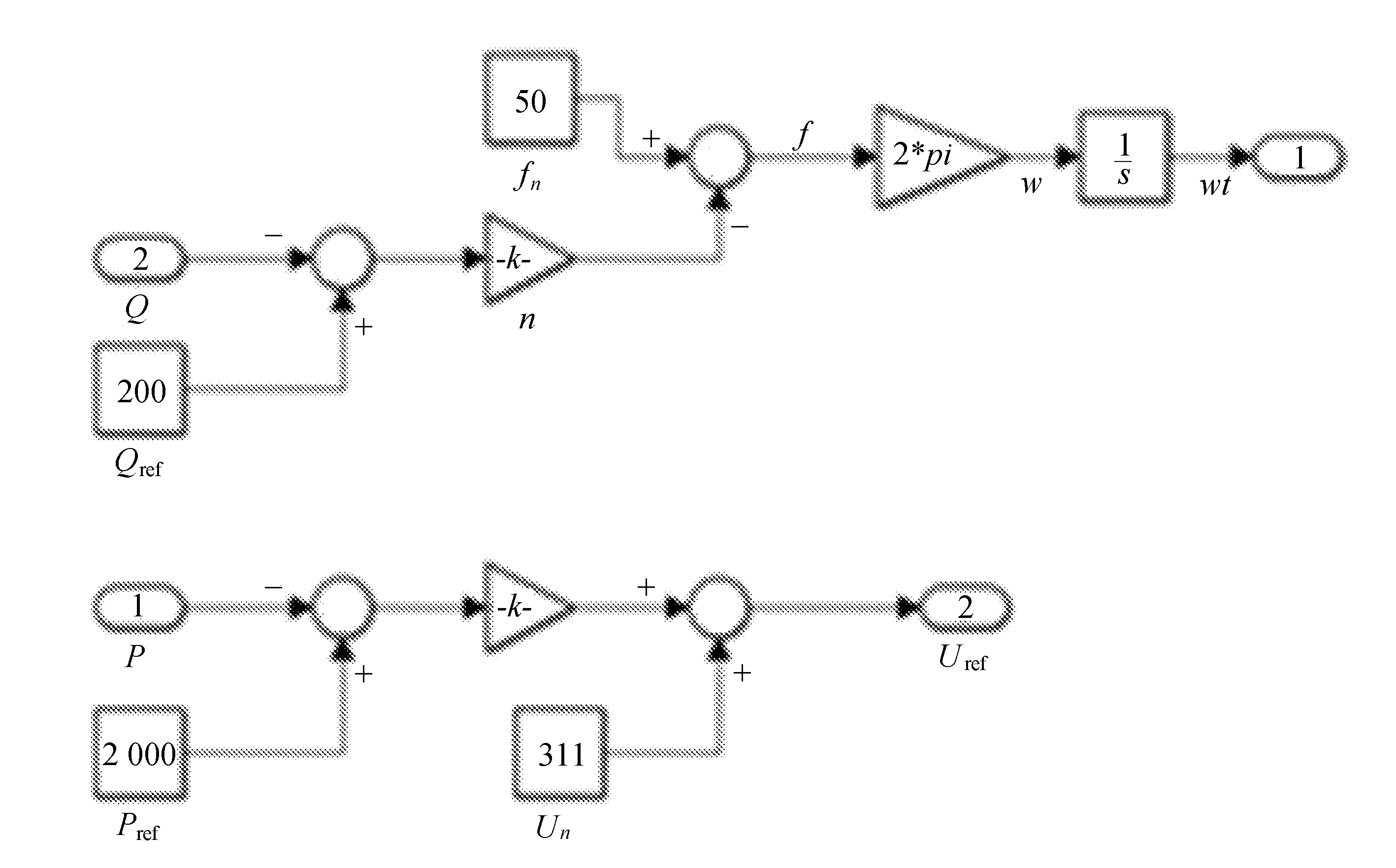
圖5 改進P-V、Q-f下垂控制的仿真模型
2.2 虛擬阻抗環節
為了提高系統穩定性,減少系統產生的諧波,更好地實現有功、無功之間的解耦,文中在系統的控制過程中加入了虛擬阻抗環節。文中提出的控制方法框圖如圖6所示。
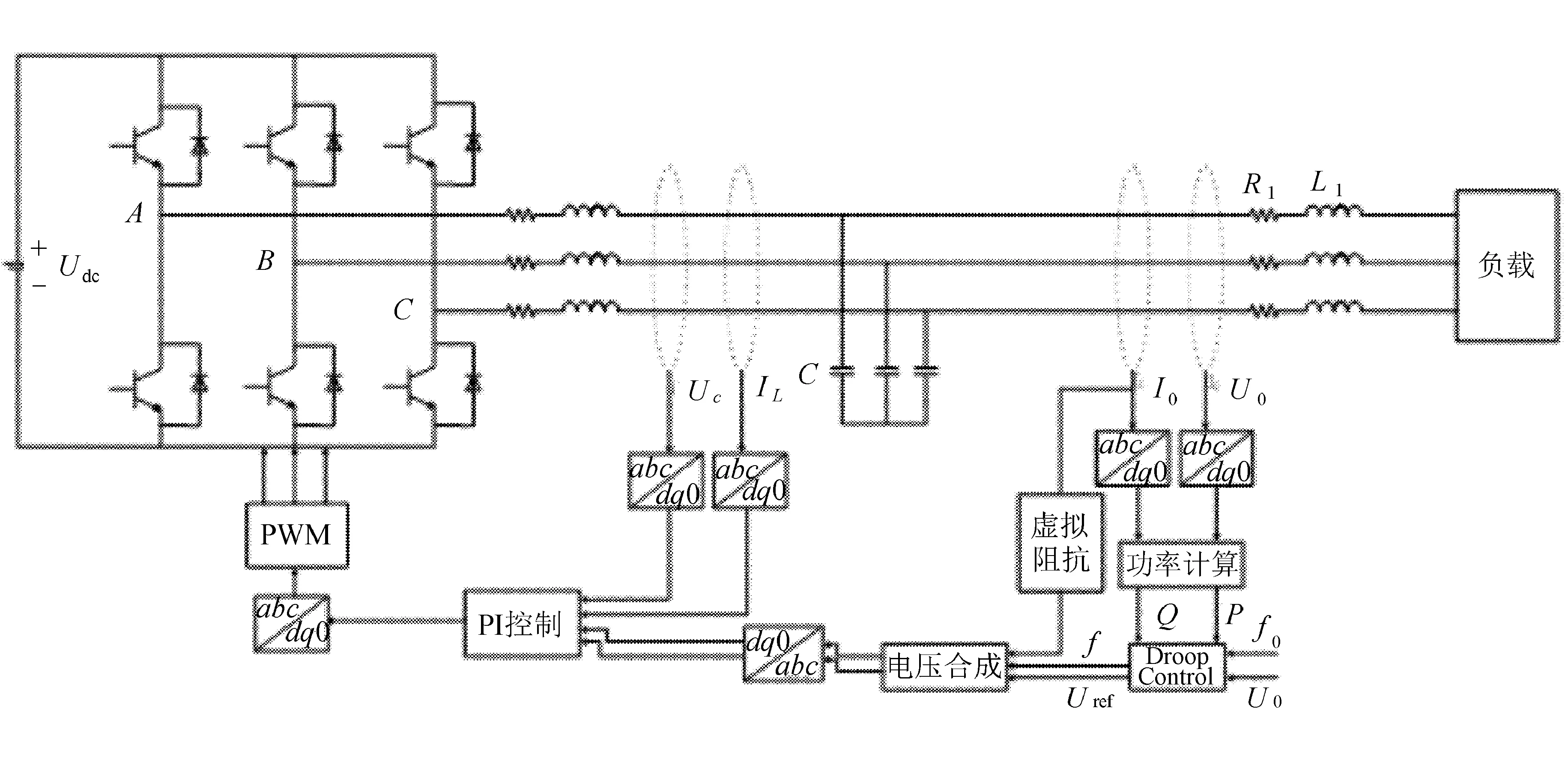
圖6 基于虛擬阻抗的下垂控制
在改進的下垂控制的基礎上,從微電網系統中引出電流I0,并將該電流引入虛擬阻抗環節,使其與虛擬阻抗系數k相乘。同時用下垂控制環節輸出的電壓Uref減去電流I0和虛擬阻抗系數k的乘積,最終得到新的電壓值進行PI控制,并將產生的調制信號傳入PWM調制模塊。這一過程形成了閉環控制。其中虛擬阻抗部分的數學模型可以表示為:
U=Uref-ZkI0(5)
3 仿真結果
采用Simulink對提出的控制方法在微電網離網運行狀態下進行了仿真分析。
本仿真系統有兩個分布式電源,分別為DG1、DG2。
三相逆變器參數如下:
交流電壓有效值為380 V;
濾波電感大小為0.264 mH;
內阻大小為0.642 Ω;
開關頻率為10 kHz。
t=0時,系統啟動,DG1和DG2開始運轉,為系統供電;t=1 s時,分布式電源DG1發生突變;t=2 s時,分布式電源DG2發生突變,最終系統的有功功率和無功功率趨于穩定,實現了系統輸出功率的解耦和分配。
系統功率仿真圖如圖7所示。

(a) 系統輸出的有功功率波形
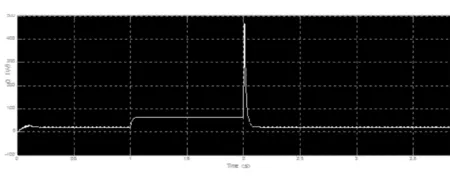
(b) 系統輸出的無功功率波形
由圖7可見,在分布式電源發生突變后,系統有功功率和無功功率的輸出波形能夠對應變化,并最終趨于穩定,證明了文中所提出方法的可行性。
分別對改進前后的系統輸出電流Iabc進行了FFT分析,其結果如圖8所示。
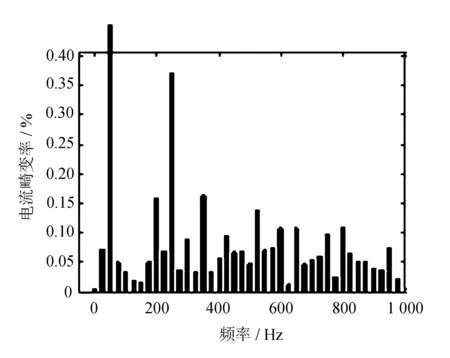
(a) 改進前FFT分析(b) 改進后的FFT分析
圖8 采用虛擬阻抗前后對輸出電流的FFT分析
從仿真結果可以看出,控制方法改進后,系統輸出電流波形諧波減少,電流趨于穩定時間減小,電流的畸變率也由1.17%降低為0.63%,由此可見,虛擬阻抗對于改善運行過程中的諧波有一定的作用。
4 結 語
對傳統下垂控制的控制機理及過程進行了簡要分析,指出了其應用于低壓微電網的缺點和不足。在此基礎上,對傳統的控制方法進行了改進,并加入虛擬阻抗環節。最后采用Simulink對提出的方法進行了模型搭建和系統仿真。通過仿真結果可知,文中所提出的控制方法能夠提高系統的穩定性,有效改善系統運行過程中的諧波問題,實現了系統輸出有功功率和無功功率之間的解耦。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
