基于單片機的桌面型并聯機器人的設計
2018-12-29 06:35:58盧桂萍鄭文鐸陳增霖
機械工程師 2018年1期
盧桂萍, 鄭文鐸, 陳增霖
(北京理工大學珠海學院工業自動化學院,廣東 珠海 519088)
基于單片機的桌面型并聯機器人的設計
盧桂萍, 鄭文鐸, 陳增霖
(北京理工大學珠海學院工業自動化學院,廣東 珠海 519088)
傳統的并聯機器人采用PLC等工業控制器控制,體積相對較大,成本高。文中設計將使用STM32單片機取代PLC作為整個并聯機器人系統的控制核心,并和C#編寫的電腦上位機軟件通訊,步進電動機作為動力,實現并聯機器人的示教與再現等功能。
并聯機器人;桌面型;單片機;上位機;步進電動機
0 引言
近幾年來,全球范圍內工業機器人的速度增長超過10%,僅2012年全球的工業機器人的總裝機量就超過了120萬臺,其中我國裝機量接近10萬臺,僅占全球裝機總量的8%。而從機器人的使用密度來看,2014年,全球工業機器人使用密度最高的國家是韓國,每一萬名工人擁有的機器人數量達到347臺,日本以339臺/萬人僅次于韓國,德國以251臺/萬人排第三,而我國只有21臺/萬人,這樣的水平甚至不到國際水平55臺/萬人的1/2。目前看來,我國制造業的自動化程度相對較低,仍有很大的發展空間。另外,我國的工業機器人市場多為國外占據,如ABB、發那科、庫卡和安川四大家占據了我國工業機器人市場的85%,而中國的工業機器人制造公司起步較晚,市場份額小,規模也小,一直被外國企業壓制。技術上,工業機器人的核心技術及關鍵部件的制造技術一直被國外壟斷,像伺服電動機及伺服驅動器,還有RV減速器等關鍵零部件國內無法生產,長期依賴進口,所以我們要加快工業機器人的研究,以推進中國工業的自動化生產及智能制造的發展[1]。
如果本設計能實現量產,將有以下意義:1)降低機器人成本;2)減小并聯機器人整體系統的體積;3)促進高校的工業機器人類課程的教學改革。
1 控制系統設計
1.1 需要解決的問題
STM32單片機作為控制核心是本設計最為重要的部分。如何讓STM32輸出指定頻率的PWM,靈活控制通用輸入輸出IO的狀態和如何利用定時器計算STM32輸出的脈沖數,是整個作品能否完成的關鍵。
機器人的機械結構設計。尺寸和公差,粗糙度的選擇和計算,減速比的計算,同步帶的選擇和各種零部件的材料選擇。
電路的設計。包括控制模塊,驅動模塊,傳感檢測模塊。
上位機的程序和算法設計。如何運用C#編寫上位機,機器人控制平臺所需要的功能,要顯示的數據,界面的設計。
串口通訊技術。本設計中電腦上位機和STM32之間傳遞的數據雖然不多,但是上位機和單片機之間的數據交互傳輸非常頻繁,幾乎每一步的操作都需要兩者的通訊來確認,所以需要安排好數據發送和接收的時間,按照其重要性分配優先級。還有上位機和單片機通過串口每次只能發送一個8位的數據,要保持信息的準確性需要編寫數據的轉換算法,同時也要提高傳輸的實時性。
1.2 總體方案
本設計將系統的工作模式分為示教模式和再現運行模式,具體的實現方案如下。
1.2.1 示教模式
示教模式是用戶通過直接操作機器人控制平臺來手動調整機器人的末端位置,并記錄下機器人當前的坐標,最終形成一段記錄機器人再現運行的軌跡的程序。在示教模式下,用戶先點擊機器人控制平臺上方向控制界面的虛擬按鍵,包括有X+、X-、Y+、Y-、Z+、Z-六個按鍵分別代表著機器人末端向X、Y、Z三個坐標軸的正反方向移動,當移動機器人末端向某個方向移動,到達目標位置在該方向上的坐標值時,按下獲取示教點按鈕,獲取機器人末端的位置坐標,然后再控制機器人在其他方向上的移動,依次記錄直到機器人末端到達目標位置。
1.2.2 再現運行模式
再現運行是要求機器人系統在已有程序的情況下,讓機器人末端根據程序里記錄的點位,一步步運行,形成一段軌跡。在示教完成后,點擊示教按鍵,示教按鍵的內容由“示教”切換為“再現運行”,此時機器人控制平臺會彈出一個提示框,提示“是否再現運行”,此時點擊“確定”,則系統開始執行程序,機器人末端開始沿著記錄的點位運行。如果點擊“取消”,則不進行再現運行。
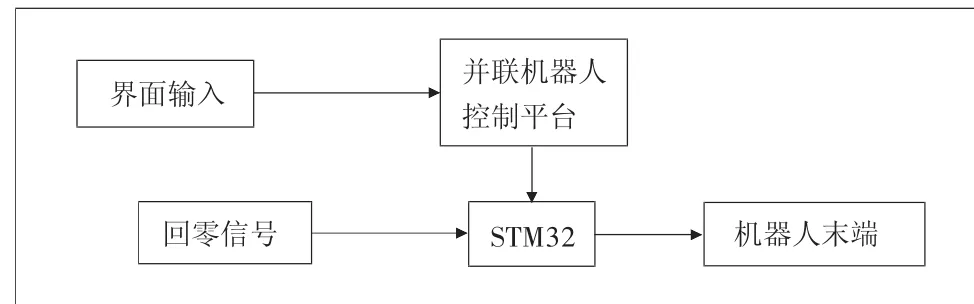
圖1 控制系統圖
從圖1可以看到,在本設計系統中,用戶通過上位機界面輸入,直接操作機器人控制平臺,上位機會記錄并儲存操作的一些數據,同時跟STM32之間進行串口通訊,交換數據,STM32根據上位機傳遞來的數據進行計算并輸出相應的信號給驅動系統,從而使機器人末端根據要求運動。
2 控制核心的選擇
2.1 對控制核心的要求
根據整個設計的要求,主控芯片要能和電腦之間進行通訊,所以要求主控芯片有串口的發送和接收功能。還有要求主控芯片能輸出3路符合要求的PWM,并且能夠進行計時來計算輸出的脈沖量,這就要求芯片有足夠多的定時器。并且要有一定數量的通用IO來滿足傳感器,驅動器的使用及一些其他需求。另外,并聯機器人的算法比較復雜,程序量大,實時性高,所以要求芯片具有較高的運算速度。
2.2 單片機選型
市面上普遍采用的并聯機器人主控造價都比較昂貴,而且開發的難度相對較大。本設計采用STM32F103ZET6作為整個系統的主控芯片,該芯片是基于ARM Cortex-M3核心的32位微控制器,LQFP-144封裝,具有豐富的外設[2]。
2.3 機器人控制平臺設計
本設計的并聯機器人控制平臺將在個人電腦上完成,采用了C#編程語言,C#是由微軟公司發布的一種面向對象的設計語言。C#作為一種現代的、通用的編程語言,其容易學習、結構化和高效率使其成為一種廣泛應用的語言[3]。
根據本設計的要求,控制平臺要有以下功能:1)STM32單片機與電腦通訊設置;2)并聯機器人的運動控制;3)示教與再現運行的設置;4)相關參數的顯示。
所以,本設計的并聯機器人的控制平臺分為4個模塊,分別是串口設置、方向控制、示教與再現窗口和數據顯示[4]。最終設計的控制平臺界面如圖2所示。

圖2 并聯機器人控制平臺界面
3 機械結構設計
3.1 機械結構設計整體要求
機械結構作為并聯機器人的硬件,對機器人的運動精度有著至關重要的影響,所以對機器人的機械結構有以下的基本要求:
1)基于本設計的定位,首先必須滿足運動精度、運動范圍、經濟性等要求[5];2)滿足機器人運動精度對機械結構的剛性、變形量的要求;3)在經濟性許可的前提下應該盡可能縮短傳動鏈,簡化傳動結構,提高傳動的精度和效率;4)出于經濟性的考慮,部分部件將采用手動加工,所以應該將個人手動加工的能力范圍考慮到部分結構的設計和選型中;5)應方便加工和裝配,對于加工的誤差應該有機構或者措施進行調整補償,使得可以降低零部件的加工精度要求;6)結構簡單,可靠合理,符合加工的可行性。
3.2 機械結構整體布局
本設計的并聯機器人一共3個自由度,根據并聯機器人的結構要求,每個自由度控制的機械臂互成120°,由步進電動機作為動力來源,步進電動機通過減速裝置和主機械臂相連,主機械臂再和副機械臂相連,最后副機械臂的另一端通過抓具中心連接,形成整個機器人運動部分的機械本體,如圖3所示。步進電動機和減速機構直接固定在基板上,考慮到機械零部件加工的精度,基板和步進電動機等零件的裝配必須位置可調[6]。
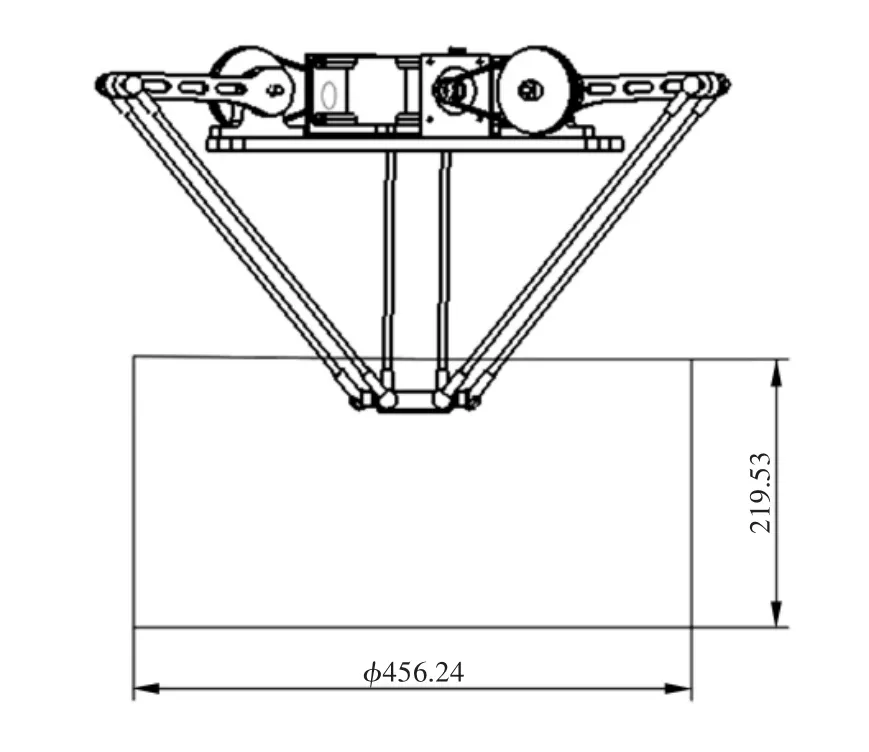
圖3 并聯機器人工作范圍
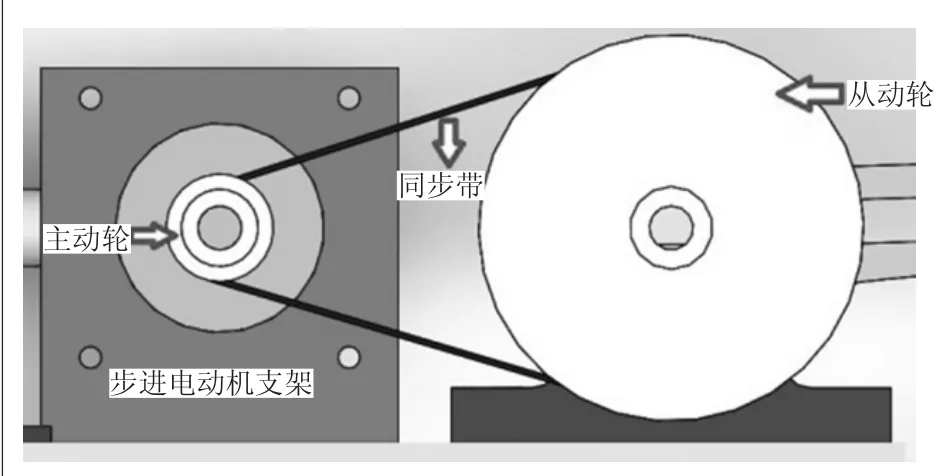
圖4 傳動系統
3.3 傳動系統設計
考慮到成本與體積問題,還有機器人使用的負載不會太大,所以使用的步進電動機力矩和傳動系統減速比不要求太大。同步帶傳動具有傳動比準確、對軸作用力小、結構緊湊等優點,但是減速比沒辦法像減速箱一樣大,且體積較大,占空間,考慮到并聯機器人的主要搬運對象是重量較輕的物體,所以選用同步帶減速是可行的[7]。所以本設計選用同步帶進行減速,考慮到帶輪的直徑,選用減速比為1:4,主動輪齒數為10,從動輪齒數40,如圖4所示。
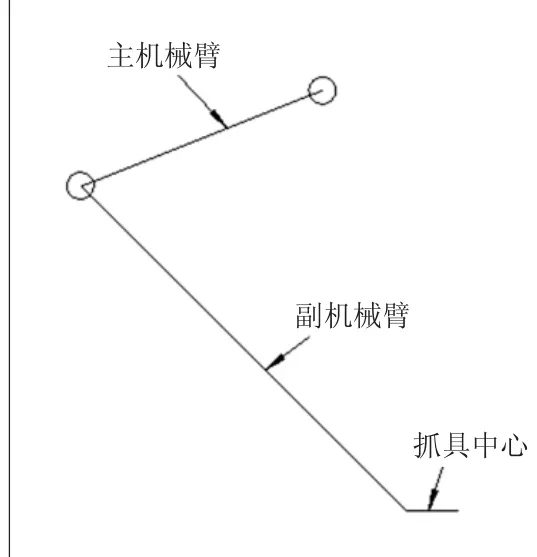
圖5 機械臂結構簡圖
3.4 機械臂設計
并聯機器人的機械臂分為主機械臂和副機械臂,如圖5所示,主副機械臂一共3對,一個主機械臂和一個副機械臂相連,最后每個副機械臂的另一端通過抓具中心相連[8]。
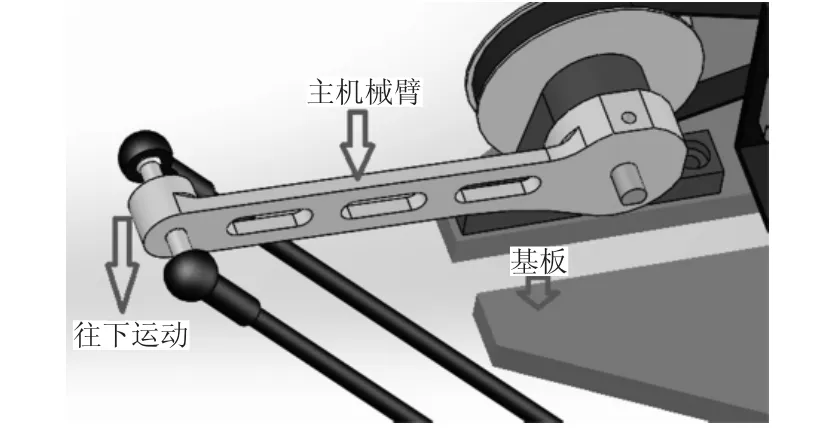
圖6 主機械臂往下運動
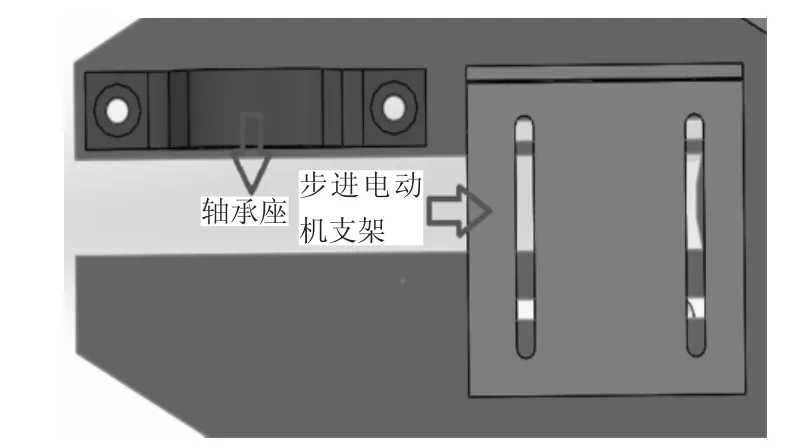
圖7 軸承座和步進電動機支架相對位置
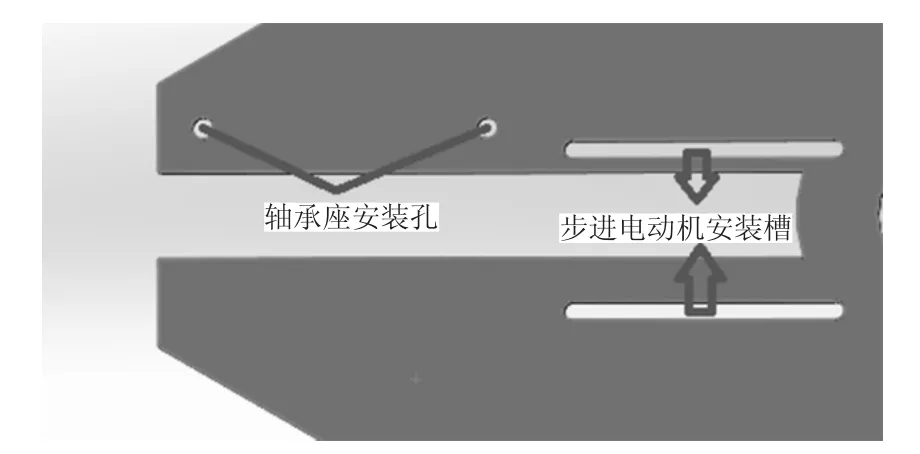
圖8 軸承座和步進電動機安裝孔設計
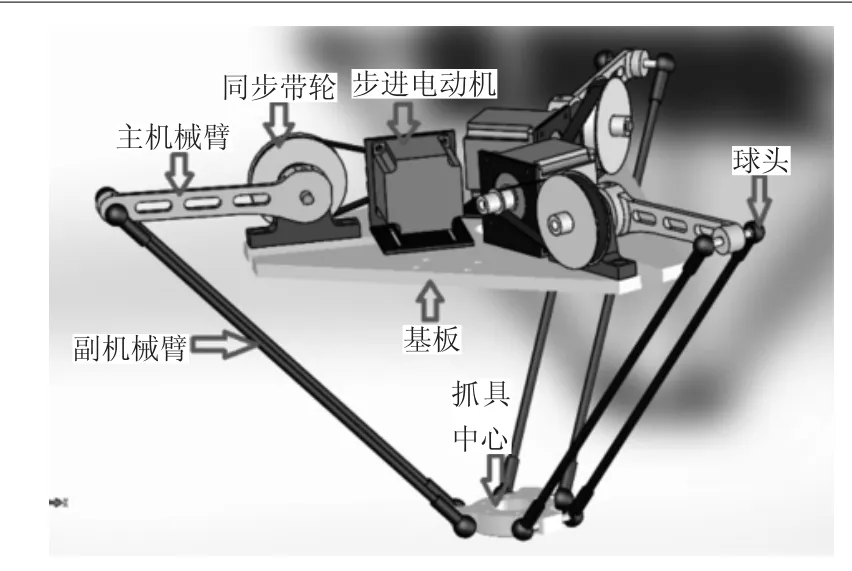
圖9 機器人機械結構裝配圖
3.5 基板設計
基板是并聯機器人的主要結構,要承受整個機器人本體大部分結構的重量,在本設計中,包括整個傳動系統,步進電動機都是安裝在基板上,所以基板的設計合理性尤為重要。
我們的并聯機器人指的是Delta機器人,從字面上理解就可知道這種機器人的外觀呈三角形,所以基板的外觀也是三角形,使整個作品更加美觀。因為傳動系統安裝在基板上,所以主機械臂也在基板上方,但是由于主機械臂將跟著帶輪軸旋轉,基板將阻礙到主機械臂往下方轉動,所以,基板上應該開一個槽,使得主機械臂能順利通過基板。如圖6所示。
另外,本設計使用同步帶作為減速機構,同步帶在使用一定時間后會出現松弛現象,且由于制造精度的問題,每個同步帶實際周長都不一定等于設計周長,所以,同步帶的張緊就要依靠調節主從動輪之間的中心距來實現,所以就要求軸承座和步進電動機支架之間的距離可調[9-15],如圖8所示。由于軸承座的位置將決定主機械臂的位置,且每個主機械臂之間互成120°,所以,軸承座的位置應該確定下來,通過調整步進電動機支架的位置來調整二者之間的中心距。如圖8所示,在基板上安裝步進電動機支架的地方銑出兩道比電動機支架安裝螺栓略大的槽,支架在基板上可以左右運動,從而達到調整中心距的目的。
最后設計完成的機器人整體結構如圖9所示,其中機器人的支架隱藏處理。
4 結 論
本設計驗證了利用單片機作為控制核心實現并聯機器人基本功能的可能性,可作為繼續研究并完善桌面型并聯機器人的基礎,本設計中的并聯機器人一些功能還有待改進及完善。本設計中使用的主控芯片STM32單片機的性能及配置只能滿足目前相對簡單的機器人功能使用,在后續的研究設計中,需要更換性能更高的主控芯片,并且需要引入操作系統方能滿足設計要求。
[1] 趙杰.我國工業機器人發展現狀與面臨的挑戰[J].航空制造技術,2012(12):26-29.
[2] 劉火良,楊森.Stm32庫開發實戰指南[M].北京:機械工業出版社,2013.
[3] PERKINS B,HAMMER J V,REID J D.C#入門經典[M].7版.黃俊偉,譯.北京:清華大學出版社,2016.
[4] 梅萊.并聯機器人[M].北京:機械工業出版社,2014.
[5] 郭勝,曲海波.冗余并聯機器人構型綜合與應用[M].北京:科學出版社,2016.
[6] 徐兵.機械裝配技術[M].2版.北京:中國輕工業出版社,2014.
[7] 薛承基.電動機傳動系統控制[M].北京:機械工業出版社,2013.
[8] 劉善增.少自由度并聯機器人機構動力學[M].北京:科學出版社有限責任公司,2016.
[9] 何一文.機電一體化系統設計與應用[M].北京:中國水利水電出版社,2015.
[10] 祝琨,楊唐文,阮秋琦,等.基于雙目視覺的運動物體實時跟蹤與測距[J].機器人,2009,31(4):327-334.
[11] 秦志強.C51單片機應用與C語言程序設計[M].北京:電子工業出版社,2007.
[12] 陳落根,羅振軍,李玉航,等.基于SAMCEF的四自由度并聯機器人動力學建模與仿真[J].機械設計與研究,2013(6):796-800.
[13]程世利.并聯機構若干基本問題研究[D].南京:南京航空航天大學,2010.
[14]黃真,趙鐵石,李秦川.空間少自由度并聯機器人機構的基礎綜合理論[C]//第一屆國家機械工程學術會議.2000.
[15]徐鑫.數控進給伺服系統與驅動電動機的發展及趨勢[J].裝備制造技術,2011(6):121-123.
Design of Desktop Parallel Robot Based on Single-chip Computer
LU Guiping,ZHENG Wenduo,CHEN Zenglin
(School ofIndustrial Automation,BeijingInstitute ofTechnology(Zhuhai),Zhuhai 519088,China)
The traditional parallel robot is controlled by PLC and other industrial controller,which has the disadvantages of relatively large volume and high cost.This paper designs a parallel robot which uses STM32 MCU to replace PLC as control core,which communicates with PC software written by C#software.Step motor is used as driver to realize functions of the parallel robot teaching and representation.
parallel robot;desktop;single chip microcomputer;PC;stepper motor
TP 242
A
1002-2333(2018)01-0008-04
珠海市重點項目(3200030/070/001/001);廣東省大學生創新創業計劃2016年省級項目(DC201673)
(編輯立 明)
盧桂萍(1976—),女,碩士,副教授,研究方向為機電一體化系統設計。
2017-04-18
猜你喜歡
當代工人(2020年8期)2020-05-25 09:07:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49