基于麥克風陣列和SRC-PHAT的發動機異響定位研究
2019-01-03 02:15:06曾榮曾銳利梅檢民賈翔宇
車用發動機 2018年6期
曾榮,曾銳利,梅檢民,賈翔宇
(1.陸軍軍事交通學院研究生隊,天津 300161;2.陸軍軍事交通學院投送裝備保障系,天津 300161;3.陸軍軍事交通學院汽車士官學校裝備系裝備基礎教研室,天津 300161)
在發動機故障診斷中,故障定位一直是研究的熱點和難點。在發動機噪聲抑制中,識別主要噪聲源是抑制發動機噪聲的前提[1]。發動機異響噪聲定位具有重要的研究意義和應用價值。對于發動機故障定位研究,許多研究者提出行之有效的方法:文獻[2]提出了一種基于轉速信號的發動機失火故障診斷及識別方法,通過對轉速信號的歸一化及主成分分析提取樣本特征,建立支持向量機故障診斷模型,診斷能達到較高的識別準確率。文獻[3]提出一種基于振動信號的發動機故障診斷方法,通過壓縮小波變換時頻分析監測特征頻帶能量分布,實現故障的精確定位。文獻[4]提出一種多體仿真模型(An advanced multi-body simulation model)綜合信號濾波及人工神經網絡等信號處理方法,對發動機振動信號進行分析,較好地實現了故障定位。
然而,上述發動機故障定位研究都是基于轉速信號和振動信號,這些信號的獲取需要通過一系列較為繁瑣的設備安裝過程。相比而言,聲信號的獲取較為簡單易行。發動機噪聲主要有機械噪聲和燃燒噪聲、空氣動力噪聲等,其中大部分噪聲是由發動機缸體周期性做功循環產生的[5]。因此,噪聲中包含了大量的工作狀態信息,通過有效地分析可以獲得發動機的故障狀態和故障位置等信息。
麥克風陣列是一系列麥克風按照特定拓撲結構排列,用來采集聲壓信號的裝置。相比于單個麥克風,經過一系列陣列算法的應用,麥克風陣列具有聲源定位、噪聲抑制和目標跟蹤等優點。由于基于麥克風陣列的噪聲源識別具有可視化、智能化、信息化等特點,能夠對噪聲源實時、準確地進行描述,在工程理論研究和實際生活中得到了大量的使用[6]。
本研究采用A計權系數濾波器對麥克風采集到的聲壓信號進行濾波,保留了“興趣”頻帶的聲壓信號并提高了噪聲信號的能量比。將SRP-PHAT(Steered Response Power Phase Transform)算法的基本原理應用到發動機異響噪聲源的定位中,采用SRC-PHAT算法(即改進后的SRP-PHAT算法)對發動機氣門異響故障進行試驗定位分析。
1 麥克風陣列定位原理
發動機實際工作中產生異響故障時,有經驗的高級修理工程師可以憑借自身的聽力辨別發動機異響位置。這是由人耳自身的雙耳效應及自我“濾波”實現的。但是,高級工程師培養周期長且故障診斷的主觀性較強,診斷效果受到人為因素的制約。A計權濾波器能模擬人耳的特性對噪聲信號進行濾波[7-8],濾波效果如圖1所示,圖2示出采用A計權濾波前后異響特征頻率信號變化。可以發現,經過A計權濾波后的信號衰減了人耳不敏感頻率。通過異響信號與正常信號對比,可以檢測設置的發動機氣門異響特征頻率范圍為3 300~4 000 Hz,A計權濾波后特征頻率占信號總能量比值由12.62%提高到了29.79%,說明A計權濾波能使噪聲信號更加符合人對異響進行判斷的主觀感受。
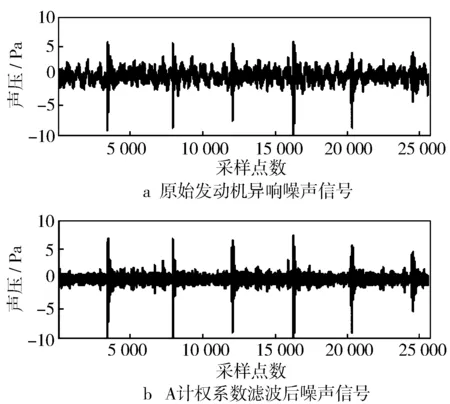
圖1 A計權濾波器濾波效果

圖2 A計權處理異響信號特征頻率變化
1.1 基于麥克風陣列的噪聲源識別方法
麥克風陣列的聲源定位方法從定位原理上主要分為三類:基于可控波束形成定位算法、基于高分辨率譜估計算法以及基于到達時延差算法。目前,應用最為廣泛的聲源定位算法是基于可控波束形成定位算法[9-10]。
可控波束形成算法起步較早,發展也較為成熟,主要運用波束形成技術在整個自定義的搜索區域不斷調整信號接收方向,所接收的總能量值較大的方向即為聲源的估計方向。在可控波束形成算法中,最典型的是相位變換加權的可控響應功率算法(即SRP-PHAT),其優點有:對麥克風的陣型沒有具體要求,能用于窄帶和寬帶信號,具有較好的抗噪性能[11-12]。
高分辨率譜估計算法是通過利用各個陣元麥克風之間的相關矩陣,計算相關矩陣的空間譜來獲取聲源的位置信息,一般只能給出聲源的方位角度信息。有關主要算法可分為兩類:特征子空間算法和子空間擬合算法,主要不足在于只適用于窄帶、遠場、平穩信號,而實際應用往往需要處理寬帶、非平穩信號,因此實用性不強。
到達時延差算法是通過不同位置的麥克風接收聲源信號的時間差,計算聲源位置相對兩個麥克風位置的曲面,多組麥克風得到曲面的交集即為聲源位置。該方法不足在于實際應用誤差較大,對于多聲源精度和效果不佳[13]。
1.2 異響噪聲源SRP-PHAT定位方法
SRP-PHAT算法主要原理是在整個定義的搜索空間設定搜索點,計算在所有的搜索點處,所有麥克風組(麥克風陣列中兩兩麥克風為一組)相位變換加權廣義互相關GCC-PHAT(Generalized Cross-Correlations Phase-Transform weighed)的函數總和。通過空間的全局搜索,把函數值最大的位置作為聲源的位置估計。
(1)

(2)
(3)
因此,式(2)可簡化為
(4)
(5)
采用相位轉換加權函數,SRP-PHAT算法的PHAT權函數值為兩個麥克風接收信號幅度譜倒數,即權函數具體形式為
(6)
(7)
(8)
1.3 異響噪聲源SRC-PHAT定位算法
SRC-PHAT算法是在SRP-PHAT算法基礎上的改進。相比于傳統的SRP-PHAT算法,SRC-PHAT算法具有以下特點:隨機布點搜索,搜索區域逐步縮減,通過迭代和空間收縮到指定精度結束搜索過程。該算法最為直觀的優點在于減少定位運算量的同時,保證了定位的精度。
SRC的基本思想是給定一個初始的搜索空間區域,在空間區域隨機選取一定個數的點,計算這些點處的SRP值,從這些點中選取使得SRP值較大的一部分點,保存這些點的位置區域,再從這些點所在區域中進行同樣的步驟,直到誤差縮小到目標區域,即可得到聲源估計位置,過程如圖3所示(j為搜索過程)。

圖3 運用SRC方法在二維平面內搜索最大值
2 發動機缸體異響噪聲定位試驗
2.1 試驗環境及坐標系的建立
以濰柴WD615發動機為異響噪聲試驗平臺,設置發動機工況為怠速空轉,發動機轉速為710 r/min。實驗室噪聲環境為開放式聲學條件,室內溫度為25 ℃,室內幾何尺寸為9 m×12 m×5 m。在本文列表以及正文中,坐標單位均為m。麥克風陣列為非規則平面陣列,麥克風相對位置如圖4所示。試驗采用霍爾式轉速傳感器采集發動機轉速信號,轉速信號上升沿通過發動機編號為一氣缸(實驗中標識為A)到達上止點時觸發,轉速傳感器具體安裝位置如圖5所示。
麥克風置于距離發動機氣缸平面0.72 m處,氣缸與氣缸間距為0.16 m,第一缸和第六缸為異響噪聲點,分別記為A,B。以麥克風陣列x軸、y軸、原點分別定義笛卡爾空間坐標系的x軸、y軸和坐標原點,麥克風陣列法線方向,向發動機一側為z軸建立空間笛卡爾直角坐標系,具體如圖6和圖7所示。在定義的坐標系下,A和B的坐標分別為[-0.40,0.05,0.72]、[0.40,0.05,0.72]。

圖4 麥克風平面陣列分布
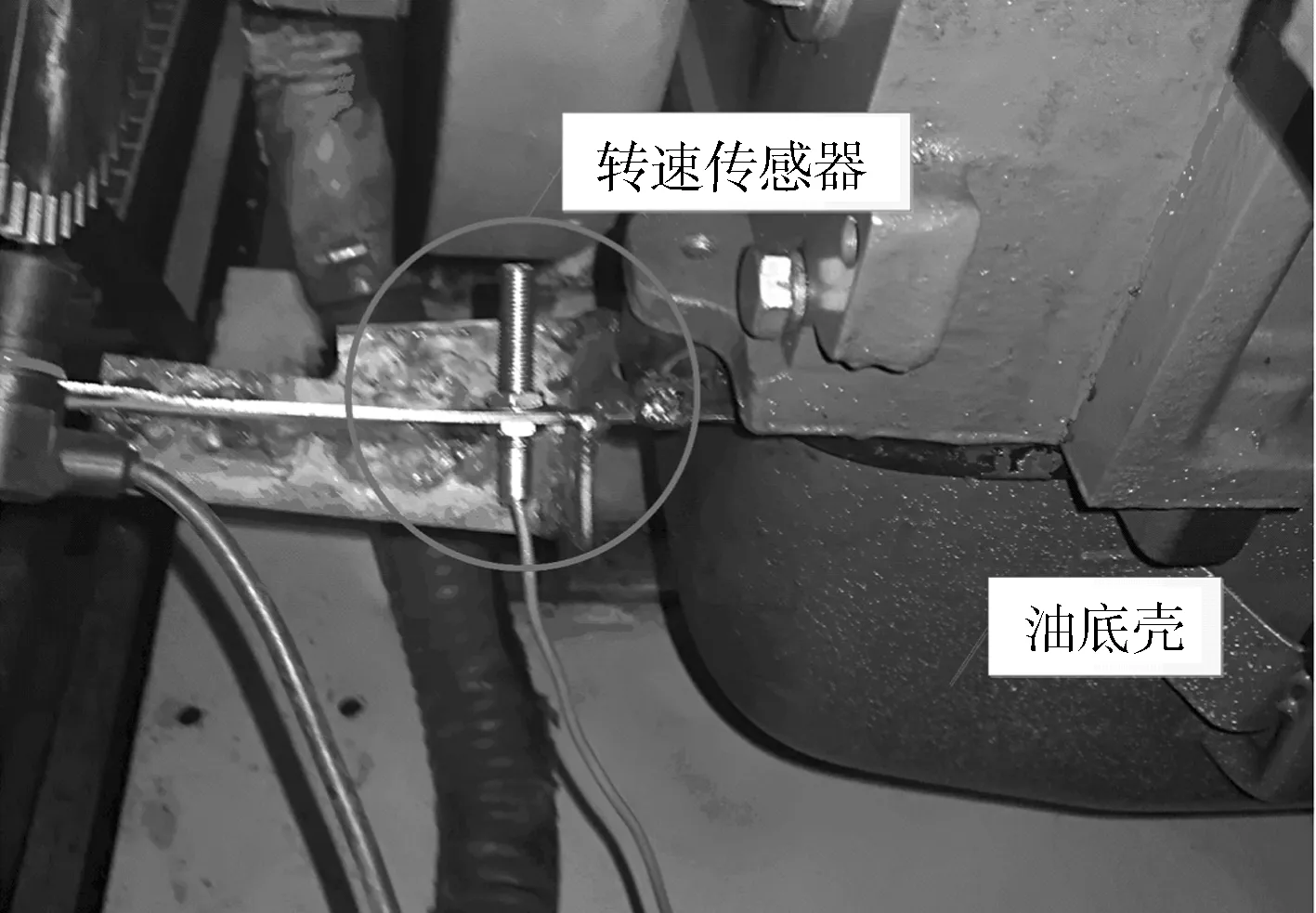
圖5 轉速傳感器安裝位置
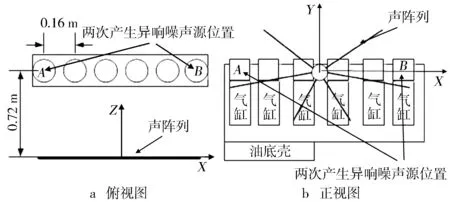
圖6 麥克風陣列和發動機相對位置

圖7 坐標系的建立
2.2 異響噪聲定位試驗
試驗過程盡量減少環境干擾噪聲,用NI數據采集系統采集異響噪聲聲壓信號,用編號為0~23的麥克風共采集到24個通道噪聲信號,同時用霍爾傳感器同步采集發動機轉速信號。定位運算是在Inter Core i7-4710MQ四核處理器,芯片組為Inter HM86,運行內存為4 GB的平臺上進行。對A點發動機異響噪聲信號的采集,設置采樣率為25.6 kHz,采集時長為5 s,共采集5組數據,分別標號為1,2,3,4,5。同樣對B點進行異響噪聲試驗并采集試驗數據。
由發動機整體尺寸可定義搜索區域為{x,y,z│x∈(-2,2),y∈(-2,2),z∈(0,2)},對每組5 s噪聲信號長度進行A計權系數濾波后,對頻率范圍為3 300~4 000 Hz的發動機噪聲信號再用SRC-PHAT算法進行定位運算,記錄區域搜索開始時刻到搜索結束得到位置估計的時間。結果如表1所示,A點試驗結果平均值為[-0.405,0.051,0.726],平均耗時4.165 s。B點試驗結果平均值為[0.403,0.076,0.722],平均耗時3.721 s。

表1 采樣時間為5 s時異響噪聲定位
為驗證SRC-PHAT算法對異響噪聲定位的時效性,用試驗采集到的轉速信號截取一個發動機做功循環信號(信號波形如圖8所示),經過A計權濾波后同樣做定位試驗,試驗結果如表2所示。A點試驗結果平均值[-0.404,0.059,0.718],平均耗時0.385 s。B點試驗結果平均值[0.410,0.081,0.748],平均耗時0.516 s。

表2 發動機1個工作循環異響噪聲定位結果
2.3 定位投影分析與誤差分析
考慮到三維坐標和其對應的SRP值通過四維顏色圖難以直觀表現,將坐標投影到定義的坐標XY平面,平面上每一點的SRP值由三維空間對應的Z軸值求和得到。在B點異響的情況下,進行SRP值的計算,將定義區間內的點投影到定義平面XY,以顏色來衡量SRP值,可得到圖9和圖10。可以發現,B點附近的SRP值明顯高于其他地方,說明應用SRP值來尋找異響點是有效的。
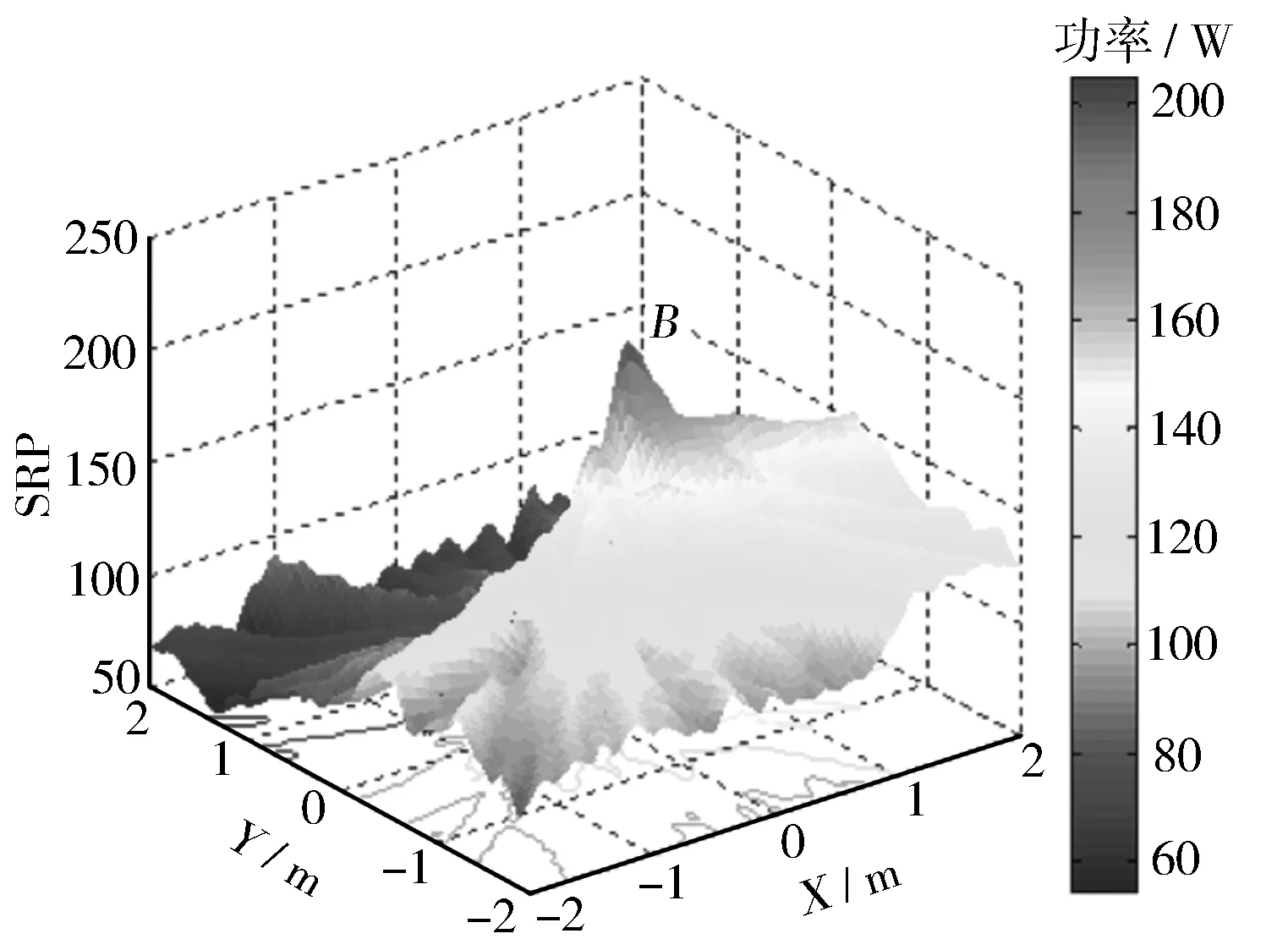
圖9 投影平面SRP值(B點異響)

圖10 SRP值投影等高圖(B點異響)
綜合A,B兩點的誤差可知,進行不同信號長度的算法運算,定位精度也不同。通過與實際測量值的比較,可得各個方向的誤差值(見表3)。

表3 坐標軸上的誤差
由誤差分析可知,由于聲源被簡化為點聲源,而實際工作中,機械運動的噪聲源分布在較廣的三維空間,且實驗環境中存在發動機多個噪聲源以及外部噪聲的共同干擾,因此,在不同方向上會出現不同程度的誤差,但誤差結果小于氣缸橫向間距,不影響異響噪聲源的定位。對于同樣的異響噪聲源,采集到噪聲信號長度越長,包含的噪聲源位置信息越全面,定位效果也越佳。
2.4 SRP-PHAT 和SRC-PHAT算法對比分析
分別取A,B兩點各1個周期進行算法定位,設置SRP-PHAT搜索間隔0.1 m,定義相同搜索區間,評價指標為定位結果和運算時間(見表4)。再加大搜索精度,將搜索間隔劃為0.01 m,SRP-PHAT的運算量過大,受硬件設備條件限制,數據處理平臺無法得到運算結果。
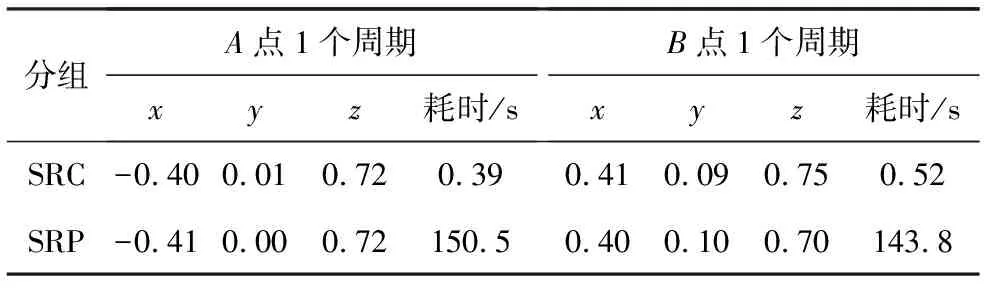
表4 SRP-PHAT與SRC-PHAT對比
可以發現,SRC-PHAT應用于發動機異響故障定位具有良好的準確度。對于SRP-PHAT算法而言,理論上可以得到精度更高的定位坐標,但是具體應用上,需要花費的時間代價也成指數增長,難以實際推廣應用。
3 結束語
本研究針對柴油機產生異響難以定位等問題,提出采用A計權系數濾波器對發動機異響噪聲信號進行濾波,運用SRC-PHAT算法對發動機異響噪聲進行定位的方法。實例表明,A計權系數濾波器能消除大部分人耳不敏感信號,提高“興趣”信號能量比例。SRC-PHAT算法相對SRP-PHAT算法在處理時效上有較大的改進,運用SRC-PHAT定位算法對柴油機氣缸異響噪聲定位時,得到的聲源位置與實際測量值誤差在可接受范圍內,該方法可應用于發動機異響定位研究。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
