基于三維激光掃描技術的變形監測方法研究
2019-01-03 02:03:19簡銳敏
西部資源 2019年3期
簡銳敏
摘要:三維激光掃描技術不需要合作目標就能自動、快速、連續地對被掃描物體進行整體監測,并能準確生成三維立體模型,從而真實描述掃描對象的整體結構及形態特性,彌補了傳統變形監測的片面性和局限性。本文以廣佛肇高速公路鼎湖山隧道監測項目為例,介紹了三維激光掃描技術的原理方法,并與傳統監測方法進行數據比對,為三維激光掃描技術在變形監測中的推廣應用提供借鑒。
關鍵詞:三維激光掃描;變形監測:點云數據:噪聲點
1.引言
目前,常規的變形監測手段主要是利用全站儀、GPS進行多點監測,即針對監測體上的重要位置設定監測點進行連續觀測的方法。由于該種手段的監測點較少,測量值僅能代表局部變形的情況,難以反映出整個監測體的變形特征和過程,而且在地形復雜地區布設監測點十分困難,危險系數非常大,不僅增加了外業工作量,獲取成果的周期又很長,大大影響了變形監測的效率。隨著三維激光掃描技術的日趨成熟,利用其高精度、高密度點云數據進行變形監測成為一種良好的途徑,其不需要合作目標就能自動、快速、連續地對被掃描物體進行整體監測,并能準確生成三維立體模型,真實描述掃描對象的整體結構及形態特性。
2.三維激光掃描技術原理分析
2.1三維激光掃描技術原理
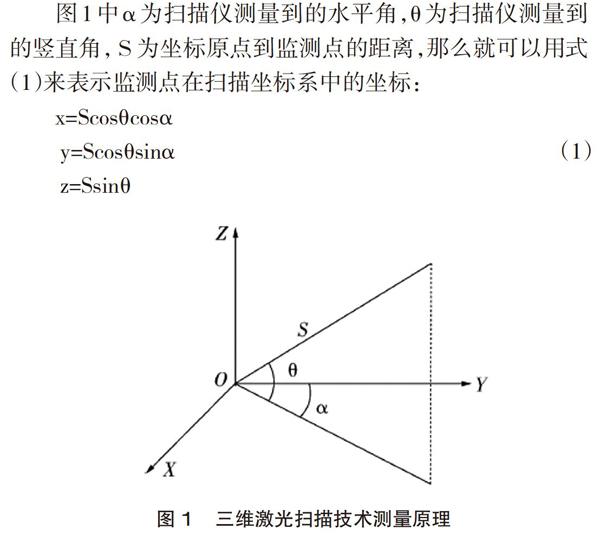
三維激光掃描技術是繼GPS(全球定位系統)技術之后興起的一項高新測量技術,它于20世紀90年代中期逐漸發展成熟,其原理和全站儀測距測角的原理類似,不同點在于三維激光掃描技術采用非接觸方式,通過發射高速激光束測量物體的表面信息,同時自動記錄大量的密集點云數據,再通過計算可大面積、高分辨率地快速復建出被測物體的空間點位信息并構建三維模型,因此它又被稱作為“實景復制技術”。三維激光掃描儀采集到的點云數據是以掃描坐標系為基準的,掃描坐標系的定義為:以發射激光束處為該坐標系原點,X軸為掃描儀水平轉動軸的零方向,Z軸為掃描儀水平時的天頂方向(理論豎直軸),Y軸與X軸、Z軸成右手坐標關系,三維激光掃描技術測量原理如圖l所示。
圖l中a為掃描儀測量到的水平角,θ為掃描儀測量到的豎直角,S為坐標原點到監測點的距離,那么就可以用式(1)來表示監測點在掃描坐標系中的坐標:
x=Scosθcosa
y=Seosθsina
z=Ssinθ
2.2數據采集方法
三維激光掃描儀采集目標數據可以分為整體采集和局部采集兩種方法,整體采集時掃描儀采集事先布設的公共點或標靶數據,再通過后處理軟件拼接測站,此方法可以整體掃描目標物并獲取物體的三維激光點云數據。局部采集是通過將三維激光掃描儀架設在基準站上,再對特定的范圍進行三維掃描,作業前應參照現場的情況和儀器的性能參數,首先設計出基準站間的距離以及掃描點的密度,以保證掃描點有一定的重疊度,基準點再通過常規導線和水準測量來傳遞三維坐標。
2.3數據分析與處理
采用數據后處理軟件對三維激光掃描獲取的數據進行專業化處理,處理步驟主要包括:點云數據的去噪、拼接點云數據、坐標轉換、將點云數據建模并進行3D分析比較。
(1)當采用整體采集的方法時,通過事先布設的公共點或標靶進行相鄰測站的拼接,這樣所有測站的點云數據就統一到同一個坐標系中。當采用局部采集的方法時,各測站的點云數據不需要進行拼接,這樣就可以避免由于拼接點云數據產生的誤差。(2)在三維激光掃描儀采集數據時,因某些原因,不可避免會產生一些沒用的噪聲數據,利用專業軟件將點云數據進行去噪處理,并減少數據冗余量。(3)在進行點云數據掃描作業時,利用GPS聯測三個或三個以上已知點,將三維掃描數據轉換成當地坐標,這樣就把掃描獲得的點云數據統一在相同的坐標系中,為后期進行數據比較和三維建模提供方便。(4)通過后處理軟件分析比較掃描的點云數據,運用不同的顏色來直觀的顯示出變形區域,可從宏觀方面開展變形分析。(5)提取不同監測時期的標靶中心以及監測點的坐標值,通過計算相鄰兩期坐標值的較差來分析監測點的水平位移變化以及垂直位移變化,方便從微觀方面開展變形分析。 3.實例分析 以廣佛肇高速公路鼎湖山隧道變形監測項目為例,采用瑞士徠卡ScanStation2三維激光掃描儀進行本次監測,該掃描儀每秒最大掃描976000點,25m范圍內的系統距離誤差小于±2mm。主要作業步驟包括點云數據采集和處理兩個方面,其中,關鍵是利用eyelone5.8軟件進行數據處理以及GeomagieStudio軟件開展變形宏觀及微觀分析。
3.1采用三維激光掃描儀變形監測
本項目采用整體采集的方法,將三維激光掃描儀的質量設定為4X,分辨率設定為1/5,考慮到采集精度和有效作業距離,相鄰測站間距設定為30m左右,以同樣的參數和方法分別采集了三期的監測數據,并利用eyelone5.8后處理軟件進行測站拼接,并剔除一些沒用的噪音數據,處理完成后將點云數據輸出為文本格式,再利用GeomagieStudio軟件將三期采集的點云數據分別進行三維建模(如圖2所示),建成的三維模型再進行3D模擬對比分析,即將前后兩期的三維數據模型進行配對比較,在模型上計算出兩個模型之間的差值,此差值即為監測體的變形量,再利用不同的顏色將變形部位顯示出來,可從宏觀及微觀兩方面進行變形分析。通過對比分析得出,整個隧道的水平位移平均值為7.lmm,累計沉降平均值為7.3mm。
3.2采用傳統方法變形監測
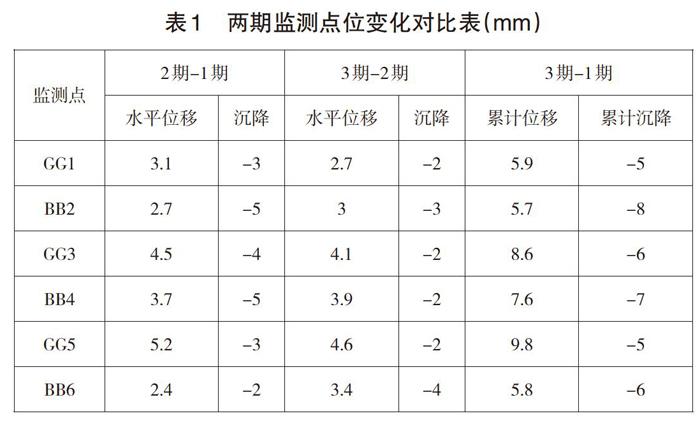
為了驗證三維激光掃描儀的監測精度,我們采用全站儀和四等水準測量的傳統方法對布設的6個公共點和標靶點同時進行了三期監測,原理方法不做贅述。監測成果如表1所示。
3.3數據分析比對
從表l數據可以看出,利用傳統方法進行監測的6個公共點和標靶點的水平位移平均值為7.7mm,累計沉降平均值6.2mm,經統計,兩種方法監測的水平位移差值只有0.6mm、累計沉降差值只有l.lmm,監測精度完全滿足要求。通過本次監測,可以得出:本次監測的水平位移量和累計沉降量都在規范要求的范圍內,且區間的變形趨于穩定狀態。
4.結語
(1)與傳統的變形監測方法相比,基于三維激光掃描技術的變形監測在數據獲取和數據處理的方法上都有著本質的不同,其具有采樣速度快、高精度、高分辨率、整體監測的特點,極大地提高了監測工作的效率,同時也改善了監測人員的作業環境。(2)三維激光掃描技術應用于變形監測的不足之處:在變形監測過程中,三維激光掃描儀與監測點之間仍需通視,基準站設置的自由度不高;采集的點云數據中含有大量的噪聲點,影響了數據的質量。相信隨著變形監測理論的不斷發展和完善,再有效結合InSAR等新技術,三維激光掃描技術在變形監測領域必將具有良好的應用前景。
參考文獻:
[1]徐源強,高井祥,王堅.三維激光掃描技術[J].測繪地理信息,2010,35(4):5-6.
[2]倪曙,喜文飛,張鳴宇.三維激光掃描儀在變形監測中的研究與應用[J].甘肅科學學報,2013,25(2):103-108
[3]蔡來良,吳侃,張舒.點云平面擬合在三維激光掃描儀變形監測中的應用[J].測繪科學,2010,35(5):231-232.
