組合式非圓齒輪行星輪系取苗機構動力學分析與試驗
2019-01-05 07:43:40葉秉良俞高紅童俊華易衛明
農業機械學報 2018年12期
關鍵詞:分析
葉秉良 唐 濤 俞高紅 童俊華 易衛明 鄭 揚
(1.浙江理工大學機械與自動控制學院, 杭州 310018; 2.浙江省種植裝備技術重點實驗室, 杭州 310018)
0 引言
全自動旱地缽苗移栽機是我國農業機械發展的重點,影響其工作質量和效率的核心工作部件是移栽機構[1-7]。筆者所在的浙江理工大學農業機械研究所發明了多種旱地缽苗自動移栽機構[8-18],其中最具代表性的是橢圓-不完全非圓齒輪行星系蔬菜缽苗取苗機構,該機構的驅動部分主要由1個不完全非圓齒輪、4個相同的橢圓齒輪和1套鎖止弧裝置組成,在嚙合傳動與鎖止弧裝置的共同作用下獲得較好的取苗軌跡和姿態。組合式不完全偏心圓-非圓齒輪行星輪系取苗機構[19]是一種新型取苗機構,該機構采用組合式非圓齒輪傳動機構代替了原來包含鎖止弧和緩沖弧裝置的非圓齒輪機構,不僅能夠實現機構非勻速連續傳動及周期內傳動比二次不等幅的較大波動的要求,而且較原取苗機構傳動沖擊較小、平穩性好。移栽機構高速高效的發展趨勢要求對機構不僅要開展運動學分析與綜合,還要進行機構動力學研究[20]。動態靜力分析法和動力學方程組序列求解法等動力學研究方法在本領域得到了成功應用[21-26]。本文針對組合式不完全偏心圓-非圓齒輪行星輪系旋轉式取苗機構,采用動態靜力分析法和動力學方程組序列求解法對機構進行動力學建模與分析,開展機構的動力學仿真和相關試驗研究,驗證機構的動力學模型,研究機構樣機的動力學特性,為進一步開展機構的強度分析和動力學優化提供理論和試驗基礎。
1 取苗機構工作原理
組合式不完全偏心圓-非圓行星輪系取苗機構簡圖如圖1所示。該機構由行星輪系傳動和取苗臂兩部分組成,其中行星輪系傳動部分是機構實現取苗運動軌跡和姿態的關鍵;取苗臂是控制取苗針張開和閉合以實現機構的取苗和推苗動作的末端執行部件,通過行星輪軸與行星輪固結,其中的凸輪與行星架固結。由于結構對稱,現以取苗機構一側為例,分析其工作原理。太陽輪(不完全偏心圓齒輪5和中心不完全非圓齒輪4固結而成的組合式非圓齒輪)與機架固定在一起,行星架固結在中心軸上,中心軸帶動行星架繞O點逆時針轉動;中間輪(中間不完全非圓齒輪3和中間非圓齒輪2固結而成的組合式非圓齒輪)在跟隨行星架轉動的同時又與行星非圓齒輪1嚙合,繞著行星架上的回轉中心M2作逆時針轉動;行星非圓齒輪1隨著行星架公轉的同時也與中間非圓齒輪2嚙合傳動,繞著行星架上的O1點順時針轉動。中間輪上的中間非圓齒輪2與太陽輪上的不完全偏心圓齒輪5嚙合時,機構完成取苗、運苗和推苗工作工程,取苗臂尖點形成ABCDEF段軌跡,兩者嚙合完成后中間輪上的中間不完全非圓齒輪3與太陽輪上的中心不完全非圓齒輪4進行嚙合,機構進入回程,取苗臂尖點形成FA段軌跡,回程結束后,開始下一個工作循環。
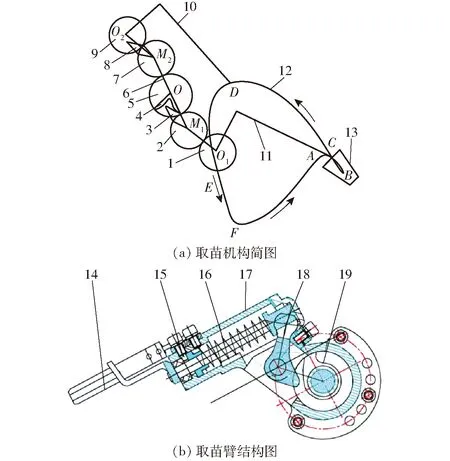
圖1 組合式不完全偏心圓-非圓齒輪行星輪系取苗機構簡圖Fig.1 Diagrams of seedling pick-up mechanism of planetary gear train with combined gear transmission of incomplete eccentric circle gear and non-circular gears1、9.行星非圓齒輪 2、7.中間非圓齒輪 3、8.中間不完全非圓齒輪 4.中心不完全非圓齒輪 5.不完全偏心圓齒輪 6.行星架 10、11.取苗臂 12.取苗軌跡 13.缽苗盤 14.取苗針 15.推苗桿 16.彈簧 17.取苗臂殼體 18.撥叉 19.凸輪
根據取苗機構的設計要求和運動分析,其運動過程可分為4個過程,分別為取苗、運苗、推苗和回程,各運動過程及其對應的行星架轉角范圍如圖2所示。
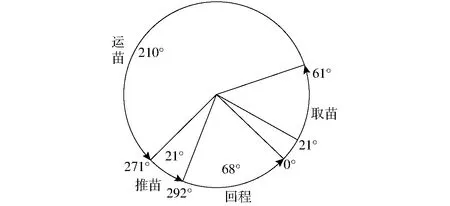
圖2 取苗機構工作循環圖Fig.2 Working cycle diagram of seedling pick-up mechanism
取苗機構正常運轉的一個工作周期內,在取苗過程中,取苗初始時刻行星架轉角為0°,彈簧處于最大壓縮量狀態,當行星架從0°轉到21°時,取苗針進入缽苗盤,撥叉相對于凸輪轉動,此過程中撥叉驅動推苗桿,從而帶動兩個取苗針逐漸閉合并夾緊缽苗,彈簧從最大壓縮量減小到最小壓縮量,撥叉對凸輪有力矩作用;而當行星架轉角為21°~61°時,彈簧處于最小壓縮狀態并維持不變,此階段撥叉與凸輪沒有相對于取苗臂轉動,撥叉對凸輪無力矩作用。在運苗過程中,行星架轉角為61°~271°時,兩個取苗針始終保持夾緊缽苗狀態,并隨著取苗臂一起運動,此過程中凸輪與撥叉一直未接觸,且無相對運動,撥叉對凸輪無力矩作用,撥叉、推苗桿以及取苗臂殼體與行星輪可視為一個整體進行受力分析。在推苗過程中,行星架轉角為271°~292°時,凸輪與撥叉開始接觸,撥叉相對于凸輪轉動,此過程中撥叉驅動推苗桿,從而帶動兩個取苗針張開并釋放缽苗使其落入植苗機構中,彈簧從最小壓縮量增加到最大壓縮量,撥叉對凸輪有力矩作用。在回程過程中,行星架轉角為292°~360°時,彈簧壓縮量最大,兩個取苗針之間的距離和推苗桿相對位移均為最大并保持不變,由于凸輪與撥叉之間正壓力的作用線正好通過凸輪回轉中心,故在忽略摩擦力情況下,撥叉對凸輪沒有力矩作用。
2 取苗機構動力學分析
開展組合式不完全偏心圓-非圓齒輪行星輪系取苗機構的動力學研究,要求出該機構在一個工作周期內各運動構件受力、運動副約束反力和驅動力與行星架轉角之間的關系,必須先建立取苗機構的行星輪系傳動和取苗臂的動力學模型,由于篇幅限制,參考文獻[23-24],本文僅對取苗機構行星輪系傳動的動力學建模進行闡述。
2.1 取苗機構行星輪系傳動的動力學建模
2.1.1行星非圓齒輪
設行星輪和中間輪嚙合點J處受力為-FJx、-FJy,行星輪軸受力為FO1x、FO1y,在不同運動過程,取苗臂受力分析不同,則行星輪的受力也會有所不同,故可根據運動過程不同分為4種情況對行星輪進行分析,本文列出取苗過程的動力學平衡方程,并對各運動過程相關參數的賦值進行說明。其他運動過程可根據該說明參照取苗過程動力學平衡方程進行建模。在取苗過程第1階段,行星架轉角為0°~21°時,推苗桿和撥叉均相對于取苗臂運動,故行星輪受力分析不包含撥叉和推苗桿這兩個構件(如圖3所示),其動力學平衡方程為

(1)
∑Fy=FO1y-FJy-(m3-mB-mT)g+
(-FHT+FKT-FZ-FBx′)sinα1-
(2)

(3)
式中FJx、FJy——中間輪與行星輪嚙合點處的受力
FZ、FKT、FHT——取苗針所受取苗阻力、彈簧對推苗桿的作用力和推苗桿受到的滑道阻力
m3、mB、mT——行星輪(含取苗臂)、撥叉和推苗桿的質量
FBx′、FBy′——撥叉對行星輪的作用力
α1——取苗針與水平坐標的夾角
(xO1,yO1)、(x1C,y1C)——行星輪旋轉中心和質心的坐標


JCO1——行星輪繞O1點的轉動慣量
MJ——中間輪對行星輪的作用力矩
δ0——行星架M1O1相對OM1的角度
Fx——行星輪x方向受力
Fy——行星輪y方向受力
MO1——O1力矩
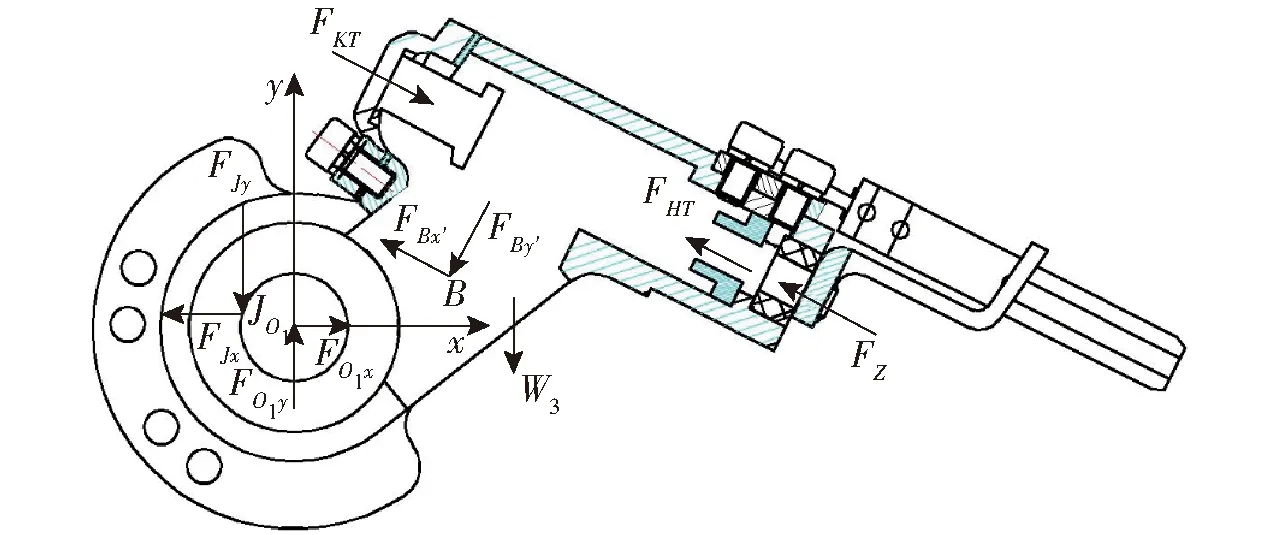
圖3 行星輪受力分析圖Fig.3 Force analysis of planetary gear
在取苗過程中,第1階段行星架轉角為0°~21°時,推苗桿和撥叉均相對于取苗臂運動,取苗臂中FHT、FKT、FZ、FBx′、FBy′均不為零,行星輪總質量為m3-mT-mB(不含推苗桿mT和撥叉質量mB),其轉動慣量按照無撥叉和推苗桿進行計算;第2階段行星架轉角為21°~61°時,推苗桿和撥叉相對于取苗臂均無運動,FKT為內力不予考慮,FHT、FBx′、FBy′、FZ均為零,行星輪質量為m3(其中包含撥叉質量mB和推苗桿質量mT)。在運苗過程中,凸輪與撥叉無接觸,將行星輪、取苗臂(包含撥叉和推苗桿)視為一個整體,FKT為內力不予考慮,FHT、FZ、FBx′、FBy′均為零。在推苗過程中,撥叉和推苗桿相對于取苗臂運動,行星輪受力情況受力分析與取苗過程中的第1階段相同,但其受到的滑道阻力方向相反,且取苗阻力為零。在回程過程中,彈簧保持最大壓縮量狀態,行星輪的受力分析與運苗階段相同。
2.1.2中間輪
中間輪與太陽輪、行星非圓齒輪的嚙合點分別為P和J。在取苗、運苗、推苗過程中,中間非圓齒輪與太陽輪上的不完全偏心圓齒輪、行星非圓齒輪嚙合;而在回程中,中間輪上的中間不完全非圓齒輪與太陽輪上的中心不完全非圓齒輪、行星非圓齒輪嚙合。中間輪受力分析如圖4所示,其動力學平衡方程為
(4)

(5)

(6)
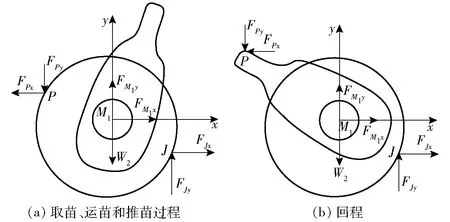
圖4 中間非圓齒輪受力分析圖Fig.4 Force analyses of middle non-circular gear
式中FPx、FPy——中間輪與太陽輪嚙合點處受力
FM1x、FM1y——中間輪軸受力
MM1——中間輪M1處所受力矩
m2、JCM1——中間輪質量和轉動慣量
MP——中間輪P處所受力矩
MJ——中間輪J處所受力矩

(xM1,yM1)、(x2C,y2C)——中間輪旋轉中心和質心的坐標
2.1.3太陽輪
太陽輪兩側的中間非圓齒輪對太陽輪的作用力分別作用在嚙合點P和P′處,由于嚙合齒輪副的不同,受力分析分為2種情況,如圖5所示。
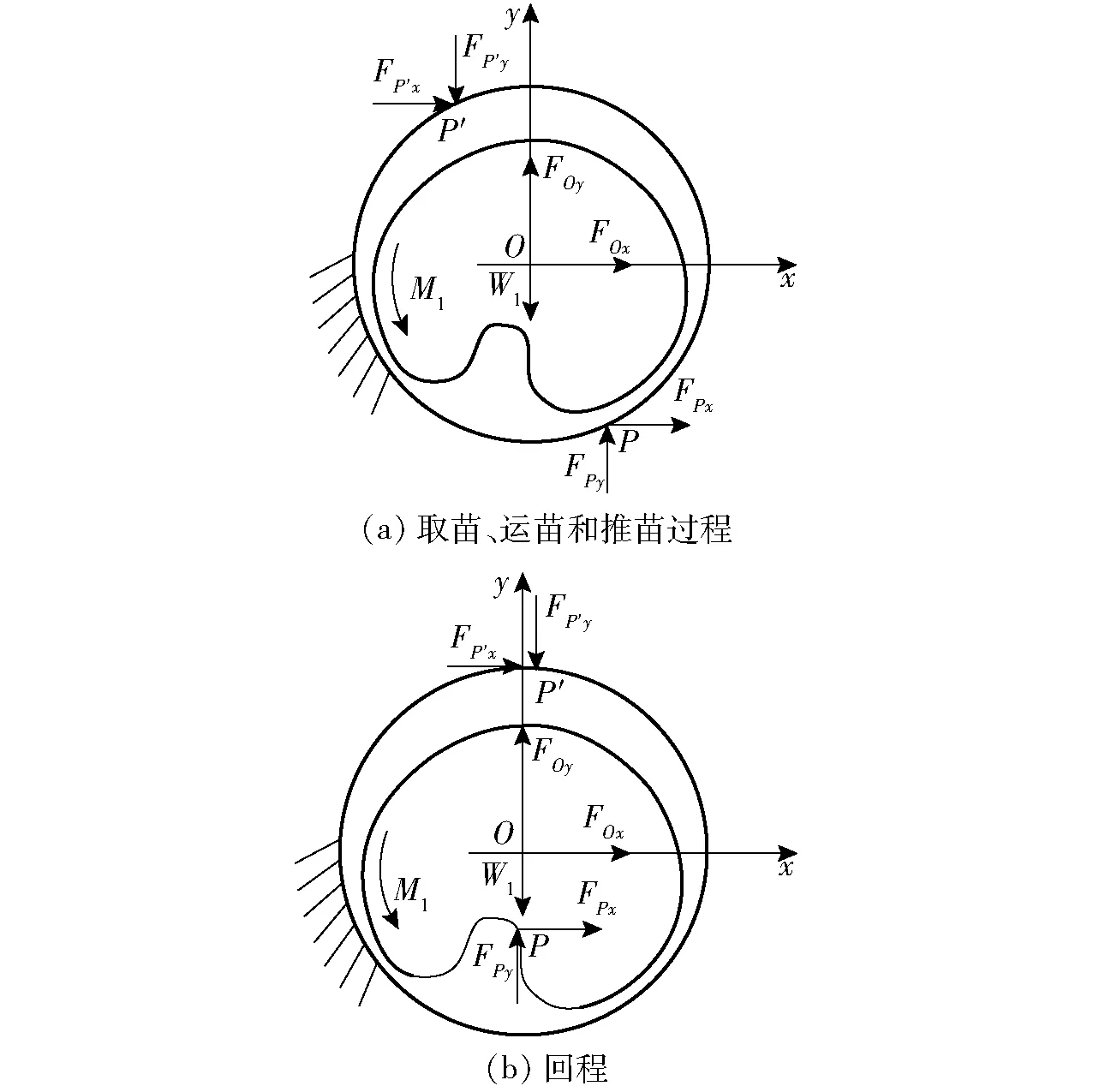
圖5 太陽輪受力分析圖Fig.5 Force analyses of sun gear
∑Fx=FOx+FPx+FP′x=0
(7)
∑Fy=FOy+FPy-FP′y-m1g=0
(8)
∑MO=M1+FPxyP-FP′xyP′+FP′yxP′+FPyxP=0
(9)
式中FOx、FOy——機架對太陽輪的作用力
FP′x、FP′y——太陽輪在對稱側嚙合點P′處受到中間輪的作用力
m1——太陽輪質量
M1——太陽輪受到的阻力矩
MO——太陽輪O處所受力矩
(xP,yP)、(xP′,yP′)——嚙合點P和P′坐標
2.1.4行星架
行星架受力主要來自鏈條驅動力、兩個中間非圓齒輪對行星架的軸心力、行星非圓齒輪對行星架的軸心力以及凸輪反力矩。由于作用在凸輪上力的方向和大小都隨時間而變化,為方便受力分析,將其等效為作用于O1的力和力偶,行星架受力分析如圖6所示。
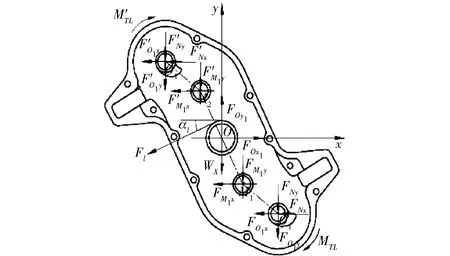
圖6 行星架受力分析圖Fig.6 Force analysis of planetary carrier
設中心軸對行星架的作用力為FOx1、FOy1,行星架的動力學平衡方程為
(10)
(11)
(12)


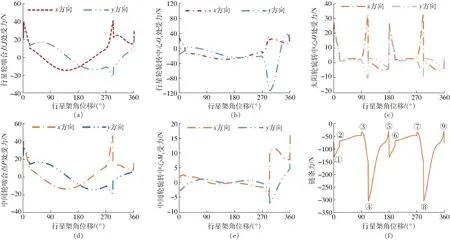
圖7 各運動構件不同位置受力變化曲線Fig.7 Applied force curves of various positions of each moving link
Fl、αl——機構所受的鏈條力及其方向角
rl——鏈輪半徑mX——行星架質量


2.2 取苗機構動力學結果分析
應用VB軟件編寫了組合式不完全偏心圓-非圓齒輪行星輪系取苗機構的動力學分析軟件,得到了取苗機構轉速為60 r/min時各齒輪的嚙合點和旋轉中心受力、鏈條力與行星架轉角之間的關系,如圖7所示。
從受力曲線得知,由于取苗機構在取苗和推苗過程中撥叉與凸輪的相互作用,以及回程太陽輪上的中心不完全非圓齒輪與中間輪上的中間不完全非圓齒輪嚙合產生柔性沖擊,取苗機構受力變化主要發生在取苗、推苗和回程3個過程。由圖7f鏈條力變化曲線可知,由于取苗機構對稱布置了2個取苗臂,對應于取苗機構運轉的一個周期,鏈條力變化兩個周期(以行星架轉角180°處為分界點)。取苗機構在取苗過程第1階段(區間①~②和⑤~⑥)、推苗過程(區間③~④和⑦~⑧)和回程(區間④~⑤和⑧~⑨)受力產生波動,尤其是推苗過程和回程受力波動較大,造成機構振動,影響機構運轉的平穩性。
2.3 與原取苗機構動力學性能比較
圖8是取苗機構動力學理論分析所得到的x、y方向支座受力變化曲線,圖9和圖10分別是課題組之前設計的橢圓-不完全非圓齒輪行星輪系蔬菜缽苗取苗機構(下稱“原取苗機構”)動力學理論分析所得到的鏈條力和支座在y方向上的受力變化曲線[25]。

圖8 取苗機構支座反力變化曲線Fig.8 Bearing reaction force curves of seedling pick-up mechanism
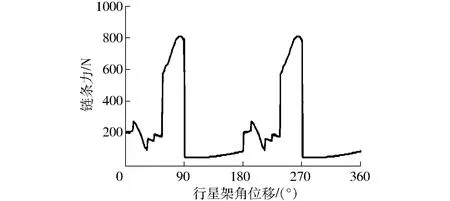
圖9 原取苗機構鏈條力變化曲線Fig.9 Chain force of original seedling pick-up mechanism
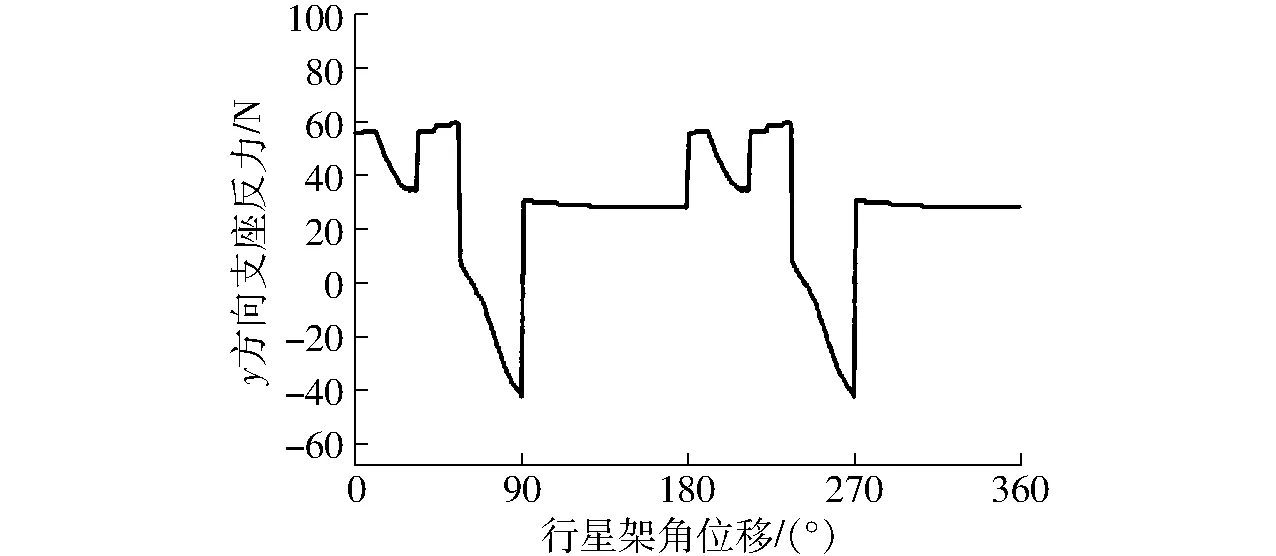
圖10 原取苗機構y方向支座反力變化曲線Fig.10 Bearing reaction force in y direction of original seedling pick-up mechanism
表1為本文取苗機構與原取苗機構的鏈條力和y方向支座反力比較。從圖表可知,本文取苗機構鏈條力和y方向的支座反力的方差由原取苗機構的6 023 N2和618.3 N2分別減小為4 096 N2和493.0 N2,降低了32%和20%,由此可知,相較于課題組之前所設計的原蔬菜缽苗取苗機構,本文所研究的取苗機構的動力學性能更好,這也說明組合式非圓齒輪行星輪系取苗機構的移栽作業平穩性更好。
3 取苗機構動力學仿真
應用UG建立組合式不完全偏心圓-非圓齒輪行星輪系取苗機構三維實體模型,將其導出保存為.x_t文件后再導入ADAMS軟件中,添加約束,設定碰撞約束中的剛度、阻尼系數、全阻尼狀態穿透值、彈簧的彈性系數和預載荷等參數后,在太陽輪軸與地面的轉動副處添加一個逆時針方向旋轉的電機,旋轉角速度為360(°)/s(即機構轉速為60 r/min),進行取苗機構的動力學仿真(圖11)。
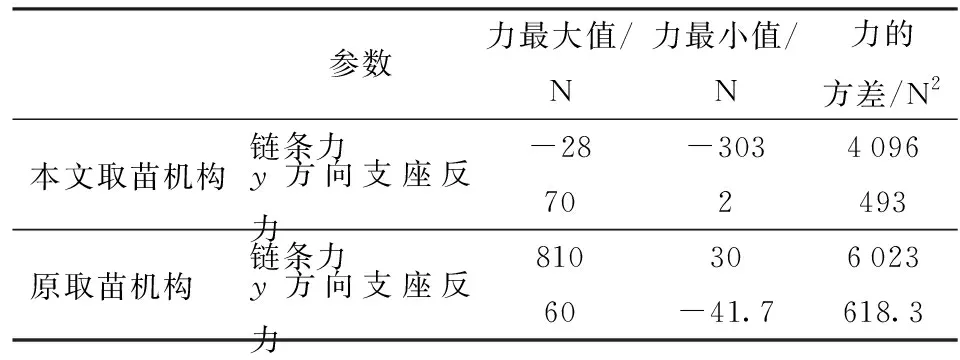
表1 取苗機構鏈條力和y方向支座反力比較Tab.1 Comparison of chain force and bearing reaction force in y direction of seedling pick-up mechanism

圖11 取苗機構動力學仿真Fig.11 Dynamics simulation of seedling pick-up mechanism
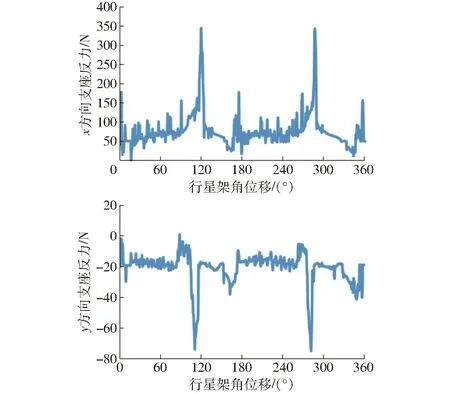
圖12 取苗機構支座反力動力學仿真變化曲線Fig.12 Dynamics simulation curves of bearing reaction force of seedling pick-up mechanism
圖12所示為取苗機構動力學仿真所得到的支座反力曲線。根據ADAMS仿真分析與理論分析支座反力曲線計算得到的受力最大幅值和方差,如表2所示。根據圖8、12和表2數據可以發現,理論分析和仿真分析的受力變化趨勢基本一致,并且幅值相差不大,驗證了本文取苗機構動力學建模和分析的正確性。另外,圖12中支座反力曲線的波動是由于取苗機構動力學仿真過程中取苗臂有輕微抖動所致。
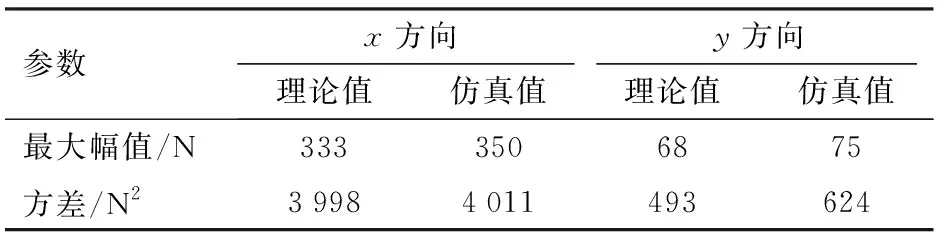
表2 取苗機構支座反力動力學仿真與理論分析結果比較Tab.2 Comparison of dynamics simulation and theoretical analysis results of bearing reaction force of seedling pick-up mechanism
4 取苗機構動力學試驗
加工出組合式不完全偏心圓-非圓齒輪行星輪系取苗機構樣機,構建取苗機構動力學試驗臺(圖13),開展取苗機構動力學試驗[22-26],在機構轉速為60 r/min時,研究取苗機構樣機的動力學特性,進而驗證取苗機構動力學理論分析的正確性。

圖13 取苗機構樣機和試驗臺Fig.13 Prototype and test bench of seedling pick-up mechanism

圖15 取苗機構y方向支座反力試驗曲線Fig.15 Test curves of bearing reaction force in y direction of seedling pick-up mechanism
圖14為取苗機構x方向支座反力曲線,表3為取苗機構x方向支座反力動力學試驗和理論分析所得到的最大幅值和方差。圖15為取苗機構y方向支座反力曲線,其中圖15a由于y方向的支座受力沒有很明顯的規律,所以本文采用Matlab自帶的Filter程序對采集到的y方向支座受力進行過濾,過濾后的曲線如圖15b所示。表4為取苗機構y方向支座反力動力學試驗和理論分析所得到的最大幅值和方差。
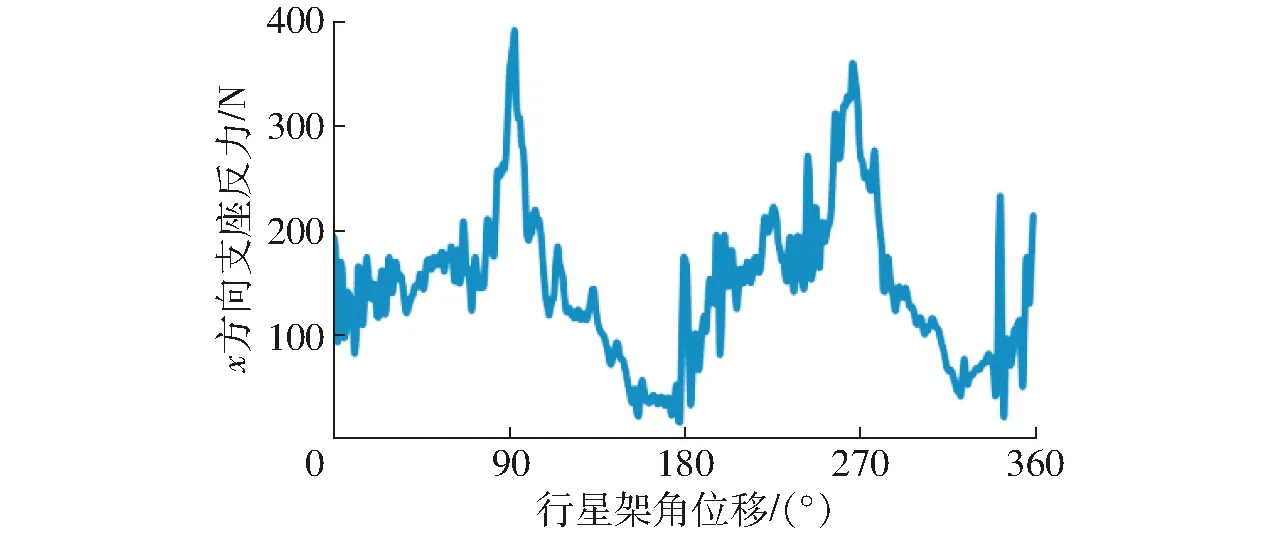
圖14 取苗機構x方向支座反力試驗曲線Fig.14 Test curves of bearing reaction force inx direction of seedling pick-up mechanism

參數動力學試驗理論分析最大幅值/N409333方差/N251263998
由于測試過程中鏈條抖動以及機構裝配誤差等原因導致試驗測量數據產生誤差。從圖14可以看出,試驗曲線存在不少鋸齒狀波動。表3中動力學試驗數值比理論分析數值大。但從圖14和圖15動力學試驗和理論分析曲線的比較可知,試驗曲線和理論分析曲線的變化趨勢基本一致,驗證了取苗機構動力學建模的正確性;而且可清楚地看出取苗機構運行周期中各個過程支座反力的變化情況,機構在特殊齒廓齒輪副接觸時,受力較大。另外,通過圖15和表4的試驗數據比較可知,本文取苗機構y方向的支座反力的方差由原取苗機構的1 171 N2減小為553 N2,降低52.7%,其最大幅值由原取苗機構的155 N減小為77 N,降低50.3%。相較于課題組以前設計的原取苗機構,本文取苗機構在動力學性能上有所改進,有利于取苗的工作平穩性。
通過開展組合式非圓齒輪行星輪系取苗機構的取苗試驗,當機構轉速為30、40、50 r/min(即單行取苗效率為60、80、100株/min)時,取苗成功率分別為93.8%、87.5%和83.6%,試驗結果表明該機構取苗成功率隨著機構轉速的升高而降低,同時驗證了該取苗機構的可行性。

表4 取苗機構y方向支座反力比較Tab.4 Comparison of bearing reaction force in y direction of seedling pick-up mechanism
5 結論
(1)分析了組合式不完全偏心圓-非圓齒輪行星輪系取苗機構的運動和受力情況,運用動態靜力分析法和動力學方程組序列求解法,建立了取苗機構的動力學模型,開發了基于VB平臺的取苗機構動力學分析軟件,計算得到取苗機構在一個運轉周期內,各齒輪嚙合點和旋轉中心受力、鏈條力及支座反力的變化曲線。計算得到的機構運動副反力為齒輪和軸的強度計算提供了理論依據。
(2)開展取苗機構的動力學仿真和動力學試驗,得到機構在轉速為60 r/min時的機構支座反力,對理論分析、虛擬仿真、臺架試驗所得到的機構動力學特性進行比較,驗證了取苗機構動力學建模和理論分析的正確性,為機構通過改進結構來改善其動力學性能提供了依據;同時對比課題組所設計的原取苗機構,本文取苗機構的動力學性能更優。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
