室內環境約束的行人航向粒子濾波修正方法
2019-01-07 12:16:28楊衛軍徐正蓺
計算機應用 2018年12期
關鍵詞:卡爾曼濾波
劉 盼,張 榜,黃 超,楊衛軍,徐正蓺
(1.中國科學院 上海高等研究院,上海 201210; 2.中國科學院大學,北京 100049; 3.上海科技大學 信息科學與技術學院,上海 201210)(*通信作者電子郵箱xuzy@sari.ac.cn)
0 引言
隨著互聯網、物聯網、智能移動設備等相關技術的發展和應用,基于位置的服務(Location Based Service, LBS)以其強大的實用性和廣闊的發展空間逐漸成為了學術領域和工程領域共同關注的熱點。
在室內環境中,LBS技術已經開始在很多場景中發揮著重要的作用,比如機場或車站等大型建筑中的實時定位與導航、大型商場中基于位置的商品廣告推送、展覽館中參觀路線的引導以及基于位置點的講解等。這些服務和功能都是對如今現代化建筑規模不斷擴大、功能不斷全面化的適應性產物,也是提升人們生活質量和改善生活體驗的剛性需求,而它們得以實現的基礎之一就是室內定位技術[1]。面對日益增長的室內定位需求,相關領域的科研人員正在不斷地嘗試利用新的方法或者改進現有方法來提高室內定位的精度。
步行者航位推算(Pedestrian Dead Reckoning, PDR)[2-4]是一種基于慣性傳感器元件的室內行人定位算法,該算法通過慣性傳感器采集到的行人運動數據(主要包括三軸加速度計、三軸陀螺儀數據等)、行人運動時的環境數據(主要包括三軸磁力計、激光測距數據等)來計算行人步伐長度和行進航向,并結合起始位置的設定來得到行人當前的位置坐標,最終可以通過搭建的智能顯示平臺等呈現出室內行人的運動軌跡。在步行者航位推算算法中,步伐檢測、步長估計、航向估計是三個關鍵問題,通過對這三個方面的優化,可以有效地提高室內定位的精度。在步伐檢測[5]方面,一般是通過某個時間段內由加速度計得到的加速度或者由陀螺儀得到的角速度變化為零來認定當前腳部處于靜止狀態,這一方法中使用到的慣性數據采集元件是佩戴在腳部的;對于步長估計[6],一般是通過經驗公式、步長模型等方法來進行,有時候還會結合卡爾曼濾波等算法來消除部分噪聲;而為了減小航向誤差,零速度更新(Zero Velocity Update, ZUPT)[7]或者零角速度更新(Zero Angle Rate Update, ZARU)的方法常被使用。由于應用慣性系統的定位方式往往缺乏真實可信的航向觀測指標,以上方法雖然有一定的效果,但是累積誤差仍然是一個十分明顯的問題。
為了減小慣性定位的累積誤差,研究人員提出了借助額外的信號發生設備來進行定位校準的方法。這里采用的額外設備信號經常被作為建立指紋庫的根據之一,或者直接通過信號強度得到距離進而融合到其他算法中。英國的Ubisense系統[8]采用的超寬帶脈沖技術,其定位精度達到了6~10 cm。劉小康等[9]利用ZigBee 無線傳感器網絡的信號強弱建立了指紋數據庫,將定位平均誤差限制在了1.5 m以內。還有利用無線網絡Wi-Fi技術[10]結合區域聚類算法來實現更加精確的室內定位的。此外,諸如藍牙[11]、射頻識別等需要額外架設信號設備的室內定位技術手段都得到了一定程度的研究和利用。不過這種憑借額外設備輔助的定位方法,無論是在設備自身成本還是在設備鋪設維護等方面的成本都帶來了更重的負擔,同時,不確定的室內環境信號干擾往往對這些方法的應用和準確度的提高造成較大困難。
此外,研究人員嘗試了基于地磁場匹配的航向校準方法來提高定位精度[12],這種方法根據室內地磁場的分布情況建立數據庫,能夠在定位過程中于一定程度上校準航向,同時容易得到行人行走的真北方向,不過仍舊難以避免在復雜室內環境中信號干擾的問題。近年,利用粒子濾波融合支持向量機和卡爾曼濾波的方式[13]也開始被嘗試,這種方式通過對傳統卡爾曼濾波PDR算法的改進和對數據進行預處理,在一定程度上提高了室內定位精度;但仍然明顯地存在著行人估計位置穿墻等不理想的情況。還有研究人員利用地圖匹配結合區域生長算法[14],根據輸入的地圖圖片信息,對每一步的落點位置進行修正,這種方法也在一定程度上提高了定位精度,并且有效地避免了穿墻情景,最終將整體誤差控制在1%左右;但是該算法只將地圖信息應用在了去除穿墻粒子的層面,并且最終誤差仍舊偏大。
綜上所述,本文針對傳統慣性定位算法中航向累積誤差的問題,提出了一種室內環境約束的粒子濾波算法來進行行人航向修正。在算法整體設計上,首先利用PDR框架下的傳統卡爾曼濾波方法得到室內行人步長和原始航向,并將后者作為粒子濾波航向修正的濾波對象,同時融合室內環境約束以完成航向校準。區別于以往地圖匹配中單純剔除穿墻粒子或僅在拐彎處建立信標的方法,改進的算法通過粒子動態選擇地圖數據得到的航向與墻體夾角來構建粒子自修正機制,通過粒子動態選擇地圖數據得到的粒子與墻體距離構建粒子賦權機制,以更加充分地利用室內環境信息。此外,該算法將航向作為唯一狀態量,相比于傳統粒子濾波過程中多狀態量同時求解的特點,單一狀態更便于數據分析和處理,降低了計算復雜度。
實驗部分通過佩戴多慣性測量單元(Multiple Inertial Measurement Unit, MIMU)[15]傳感器在辦公樓內分多組多人次進行了不同行走距離的實驗。實驗結果表明,所提算法可以減小航向誤差,提高定位精度,并且在行人行走距離增加時具有更好的穩定性。
1 基于卡爾曼濾波的PDR室內定位
航位推算算法是主流的室內定位方法之一,但由于傳感器誤差的累積,往往會形成較大的航向和定位累積誤差。通過引入卡爾曼濾波算法可以在一定程度上使此種誤差減小,以提高航向和定位的精度。而由于缺乏真實可信的行人方向觀測數據,基于卡爾曼濾波的PDR室內定位算法得到的航向仍需校準。下面將簡要給出PDR原理和卡爾曼濾波流程,并將其解算結果作為粒子濾波對象,以針對航向進一步修正。
1.1 航位推算算法
航位推算算法一般是利用慣性傳感器采集三軸加速度數據、三軸角速度數據,對其進行一次積分、二次積分、零速度檢測、步伐判定等一系列的處理后得到步長估計和航向估計,再結合設定的初始位置坐標點,逐步或者逐點繪制出室內行人的運動軌跡。文中涉及到的濾波算法均是在航位推算框架下完成的。
在二維坐標系中航位推算算法如圖1所示。其中:p0、pN代表室內行人起始位置以及終點位置的坐標點,pk、pk+1代表行走過程中在k落點時刻和k+1落點時刻的坐標,所謂落點時刻即是當步伐檢測算法判定行人腳部貼合地面的穩定時刻。另外,lk、θk代表k落點時刻行人的步長估計和航向估計。
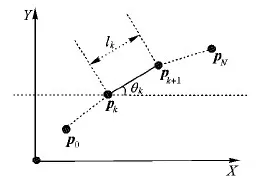
圖1 航位推算算法示意圖Fig. 1 Schematic diagram of dead reckoning algorithm
在得到k落點時刻的步長估計和航向估計之后,結合k落點時刻的位置坐標,就可以進一步地通過式(1)得到k+1落點時刻的位置坐標:
(1)
其中:(Xk,Yk)和(Xk+1,Yk+1)分別表示k落點時刻和k+1落點時刻行人在二維坐標系中的位置坐標;θk+1和Δθ分別表示k+1落點時刻航向以及k落點時刻所產生的航向變化量。
值得注意的是,由于PDR算法本身對于步長和航向的估計是通過單純積分的方式得到的,這并未對其中慣性元件產生的噪聲加以抑制,因此會存在較大的累積誤差。為了減小累積誤差,就需要結合適當的濾波算法。
1.2 基于卡爾曼濾波的航位推算
卡爾曼濾波算法是在室內定位研究中主流的噪聲處理方法之一,該算法通過構建狀態模型并結合觀測數據對每一時刻的狀態量進行噪聲濾除,能夠在一定程度上減小PDR算法中存在的累積誤差。本文提出的算法中用到的步長以及原始航向就是通過傳統的卡爾曼濾波算法結合PDR得到的。
狀態模型為:
Tk|k-1=ATk-1|k-1+uk
(2)
其中Tk=[θk,ωk,vk,pk]為狀態量,θk、ωk、vk、pk分別為航向、姿態角、速度和位置;A為狀態轉移矩陣;uk為系統噪聲。
測量方程為:
Gk=HTk|k-1+rk
(3)
其中:Gk=[vk,ωk]為觀測向量;H為測量矩陣;rk為測量噪聲。在檢測到腳部靜止[16]時,進行濾波更新,具體的卡爾曼算法實現流程如圖2所示。 通過前后兩次零速度時刻的位置坐標p1、p2可以計算當前步長為lk=‖pk-pk-1‖,此步長將作為后續粒子濾波算法的輸入。
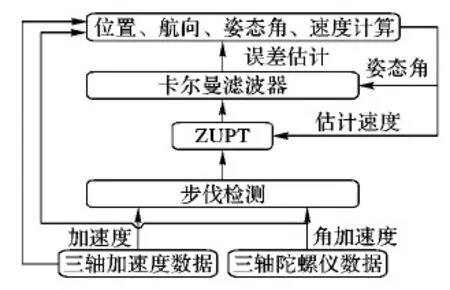
圖2 卡爾曼濾波算法示意圖Fig. 2 Schematic diagram of Kalman filtering algorithm
通過實驗驗證,基于卡爾曼濾波算法得到的行人步長估計比較準確。同時從圖2中可以直觀地看出,該算法缺乏真實可信的航向觀測數據,這導致該算法航向估計仍存在較大的累積誤差。針對這個問題,本文提出室內環境約束的粒子濾波算法,將航向作為狀態量進一步濾波修正,以達到更為理想的定位效果。
2 室內環境約束的粒子濾波航向修正方法
在第1章得到原始航向和步長數據的基礎上,本章應用室內環境約束的粒子濾波算法對行人航向進行校準,其中仍然將單步作為航位推算的基本單元。在粒子濾波過程中,利用地圖信息融合進行了兩點改進:一是在粒子初始化和粒子補償階段,利用原始航向與自主匹配的參照墻體進行粒子補償判斷并進行補償,以此構建粒子自修正機制;二是在粒子權重分配階段,依照粒子形成的步伐落點與自主選擇的墻體距離進行權重計算,以此構建依距離賦權機制。最終使位置估計和航向估計更加貼合實際情況。
2.1 粒子初始化
傳統的粒子濾波算法應用于室內定位時,在粒子初始化階段往往需要構建多維度狀態量,除航向以外,還包括姿態、二維位置、加速度等,而本算法在粒子初始化階段僅對卡爾曼濾波得到的原始航向進行粒子采樣,采樣后的粒子由式(4)表示:
F=(f1,f2,…,fN)
(4)
其中:F表示粒子集合;N表示本次采樣產生的粒子總數。
對于完成采樣的集合F,其航向粒子服從式(5)表示的正態分布:
(5)
需要注意的是,標準差σ會根據粒子位置情況進行動態調整,即當全部粒子位置表現為穿墻時,適當增大σ利于提供更多符合修正條件的粒子。該操作也可以視為一種簡化的重采樣過程。
根據算法的采樣方式,粒子分為兩種情況,即大于或者小于原始航向。然而,當粒子過大、過小或粒子分布過于均衡時,可能會出現過擬合或者欠擬合的情況,即有過多粒子出現過度補償或不被補償的現象。因此,根據實驗情況,在采樣階段確定一個恰當的標準差是必要的。
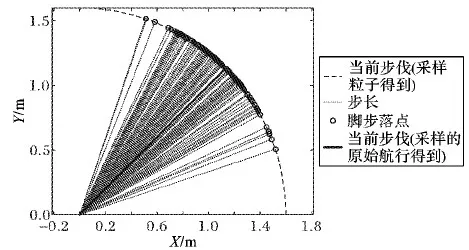
圖3 航向采樣示意圖Fig. 3 Schematic diagram of sampling heading
2.2 粒子航向修正
對航向完成合理的采樣后就要進行粒子修正,在該階段,首先將地圖信息抽象成用線段表示的結構體,具體做法是根據室內環境以及行人室內行走特點,對通路尺寸和相對位置進行實地測量和標注,以兩點一線方式結合角度在平面內繪制出墻體輪廓,并以二維坐標數據的形式加以保存以便于后續計算。
結構體如式(6)和式(7)所示:
map=(s1,s2,s3,s4...sn)
(6)
si=(p1i,p2i,λi)
(7)
其中:n表示墻體數量;si表示第i個墻體,且由起點p1i、終點p2i、墻體方向λi構成。
基于已有的室內環境結構體,提出通過動態地關聯室內環境數據與待校準樣本,即依據航向采樣產生的粒子與其相鄰墻體形成夾角的情況,自適應地對粒子航向進行補償。
其中,在每一個粒子選擇參照墻體時,會根據結合步長推算的當前落點位置時刻坐標對平面所有墻體與該坐標的相對距離進行排序。完成距離排序后會出現以下三種情況:
1)有唯一的最小距離值。
2)有不唯一的最小距離值,且多個相等的最小距離來自平行的墻體。
3)有不唯一的最小距離值,且多個相等的最小距離來自不平行的墻體。
對于第1)種和第2)種情況,可以依據兩直線夾角的性質任選一條線段作為參照墻體。對于第3)種情況,可以認為此時行人處于轉彎處或者某些粒子散落到墻體內:對于前者,此時不予補償,待行人轉彎過后再重復以上墻體選擇過程;對于后者,直接將墻體內粒子舍棄。

(8)

所有的粒子完成航向補償后具有這樣的特點,即不論粒子偏向行人直線行走整體方向的哪一側,補償行為總是通過增大或者減小航向粒子數值使其向行人行走方向收縮,以此來達到校準原始航向的目的。但是,對于每一個粒子應在校準過程中占有多大的比重,還需要通過權重分配算法進一步確定。
2.3 粒子權重分配
在傳統的粒子濾波中引入室內環境約束的一大優勢就是可以根據環境條件設置合理的偽觀測數據,而該數據又是粒子濾波過程中確定權重分配的必要前提。在本文算法中,依據行人室內行走實際情況對通路中線進行坐標數據轉換,標定每一個粒子位置到中線的距離,以此作為偽觀測數據。
因為在粒子航向修正階段已經將落入墻體的粒子進行剔除,所以本階段權重分配只針對落在通路內的粒子。在此,提出通過關聯室內環境數據與粒子落點構建依距離賦權機制,即將某一落點時刻所有粒子到中線的距離進行排序,按照距離大小確定粒子權重。
在上述過程中的墻體選取方式與上一階段粒子補償時的墻體選取方式相同,因此不再贅述。但需要注意的是,在粒子賦權階段會將形成一條通路的兩個墻體都選取出來,以便后續計算。
至此,粒子開始進行具體的權重計算,如圖4所示,粒子權重由通路中線向選取的兩側墻體逐漸遞減,其關系滿足式(9):
wi∝1/di
(9)
其中:wi為第i個航向粒子的絕對權重;對于第i個航向粒子,di為估計位置到通路中線的距離。
式(10)確定了粒子歸一化權重值:
(10)
其中:Wi為歸一化權重;N為參與權重分配的所有粒子總數。
值得注意的是,為了提高計算效率,實際權重分配是由每個粒子到其相鄰墻體的距離決定的,如式(11)所示:
(11)
其中ci表示通路中線到墻體的距離。
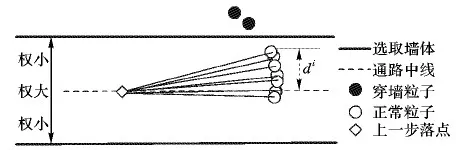
圖4 權重分配示意圖Fig. 4 Schematic diagram of weight allocation
這樣設計是因為,一方面當粒子距離墻面越遠,距離通路中線就越近,其權重也就越大;另一方面,式(11)可以直接從已有的室內環境結構體中獲取數據,從而避免增加不必要的計算代價。
2.4 確定行人位置
完成粒子采樣、粒子航向修正、粒子權重分配的過程后,進一步地,可以利用式(12)得到校準后的航向:
(12)

然后結合步長估計就可以利用式(1)中(Xk+1,Yk+1)的計算方法得到行人當前位置坐標。
綜上所述,以下給出本文算法的偽代碼。
輸入 室內環境測量數據、通過卡爾曼濾波得到的步長估計lk以及原始航向θk(k=1,2,…,M);
輸出 校準后的航向θcor以及位置坐標(X,Y)。
1)
對于θk∈[θ1,θM]執行以下命令
//零速度檢測算法得到行人前行過程中M個航向角
2)
//粒子采樣過程
3)
F=normrnd(θk,σ,1,N)
//采樣粒子數為N,正態分布期望為θk,標準差為σ
4)
//粒子航向補償過程
5)
構建室內環境結構體map=(s1,s2,…,sn)
6)
選擇參照墻體si用其完成第8)~9)行代碼計算
7)
fori= 1:N
8)

9)
10)
11)
end
//在補償過程之后粒子數量可能低于初始的采樣數,
//但為了方便敘述,仍用N表示
12)
//粒子權重分配
13)
選擇通路墻體si、sj用其完成第14)~15)行代碼計算
14)
di=第i個粒子距離墻面的距離
15)
//計算歸一化的權重
16)
end
//粒子濾波對航向校準的過程完畢
17)
//得到優化后的第k步的航向
18)
//計算位置坐標
19)
以上偽代碼對提出算法的整體邏輯進行了概括。進一步地,可以通過分析其中一些關鍵步驟,討論算法在計算代價上的改進。
在代碼第3)行粒子采樣時,僅涉及到原始航向θk一個維度,相比于傳統粒子濾波算法中構建多維度狀態量的過程,將矩陣運算變為數值運算,其對于運算代價的減少是顯而易見的。此外,在代碼第6)、13)、15)行的計算過程中實現了對室內環境結構體的復用,尤其是在第15)行中通過轉換偽觀測數據在權重分配中的應用方式,可以有效地提升計算效率。
3 實驗結果與分析
為了驗證本文提出的室內環境約束的行人航向粒子濾波修正方法的有效性,測試人員在研究院1號辦公樓三層進行了多組不同距離的重復實驗。實驗過程如圖5所示,圖中測試人員右腳佩戴MIMU集成的慣性傳感器模塊,佩戴位置位于腳尖。該模塊采樣頻率為125 Hz,可以同時完成4組時鐘對齊的數據采集。圖5中測試人員右手為手持式激光測距儀,用來測試實際行走距離以及進行定位精度標定,其測量精度為0.01 m。

圖5 實驗過程示意圖Fig. 5 Schematic diagram of experimental process
在數據處理過程中,使用的重力加速度為9.788 m/s2,使用的加速度數據和陀螺儀數據為MIMU輸出數據的均值,采樣粒子數為3 000。本文算法最終軌跡效果以及數據對比結果通過Matlab軟件仿真來實現。
通過實地測試分析,本文中對兩種室內定位算法的結果進行了比較:一種是本文提出的室內環境約束的行人航向粒子濾波修正算法,另一種是傳統的卡爾曼濾波室內定位算法。兩種算法均可在行人行走估計軌跡與實際軌跡的對比中直觀地看到解算效果。如圖6所示,實線軌跡為實際行人室內行走路線,行走距離為246 m,虛線軌跡為傳統卡爾曼濾波算法得到的行人行走路線效果,雙劃線軌跡為本文提出算法得到的行人行走路線效果。
由圖6可知,對比實際行走軌跡,傳統卡爾曼濾波算法的解算會出現較大的位置和航向偏差,并發生明顯的穿墻行走現象;經過計算,該算法終點位置絕對誤差為0.57 m,相對誤差為0.23%,在終點處航向累計誤差為7.6°。而本文提出算法所得到的估計軌跡更加貼合實際軌跡,并且有效地避免了穿墻行走現象;經過計算,本文算法終點位置的絕對誤差為0.25 m,相對誤差為0.10%,在終點處航向累計誤差為0.39°。因此,在該次實驗中,本文算法相比傳統卡爾曼濾波定位算法降低了0.32 m的絕對位置累積誤差,降低了7.21°的航向累積誤差。本次實驗結果可以在一定程度上說明本文算法的有效性。
為了進一步驗證本文提出算法的有效性和穩定性,測試人員設置了5段不同的行走距離,分別為61 m、108 m、215 m、323 m、435 m,每段行走距離進行獨立的三組重復實驗。實驗計算兩種算法得到終點位置絕對誤差以及航向累計誤差。其中,將三組重復實驗得到的終點位置絕對誤差的均值作為對應行走距離的位置絕對誤差,將三組重復實驗得到的航向累計誤差的均值作為對應行走距離的航向累計誤差,以此減小實驗結果的偶然性。
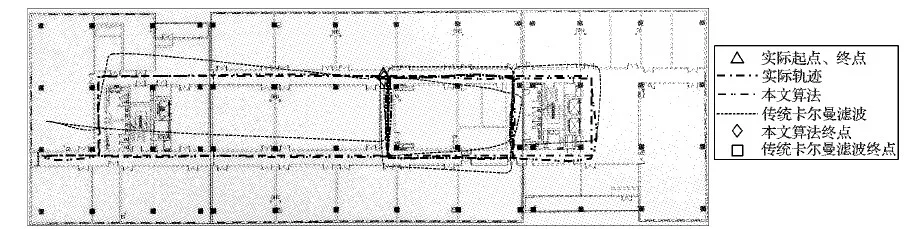
圖6 不同算法下行人軌跡對比Fig. 6 Pedestrian trajectory comparison of different algorithms
5段不同行走距離重復實驗的位置絕對誤差和累計航向誤差統計如表1所示。
從表1中可以得知,對于傳統卡爾曼濾波算法來說,不論是位置誤差還是航向誤差,在整體上都是呈現隨著行人行走距離增大而不斷增大的趨勢。但在一些個別實驗中,這兩種誤差會出現小于較短距離條件下誤差的情況,這是由于傳統卡爾曼濾波算法本身在航向漂移方面具有不穩定的性質造成的。所以在實際實驗中應用多組數據統計求均值的方法是很具有必要的,能夠提高實驗結果的可信度。
而對于本文算法來說,從數據觀察的角度并沒有發現明顯的發散趨勢;同時,可以通過數據對比發現不同距離下的絕對位置誤差和航向誤差并沒有過大的差距。這就說明了本文算法能夠有效地減小航向漂移的不穩定性,進一步地,與傳統卡爾曼濾波算法得到的誤差數值進行逐個對比也可以說明本文算法能夠在一定程度上減小兩種誤差。不過,為了滿足對比實驗對嚴謹性的要求,解算結果仍然對三組重復實驗取均值。
為了更加直觀地說明本文算法相比于傳統卡爾曼濾波算法在減小終點位置絕對誤差和累計航向誤差方面的有效性和穩定性,還需要結合多組重復實驗的結果完成進一步的數據分析。
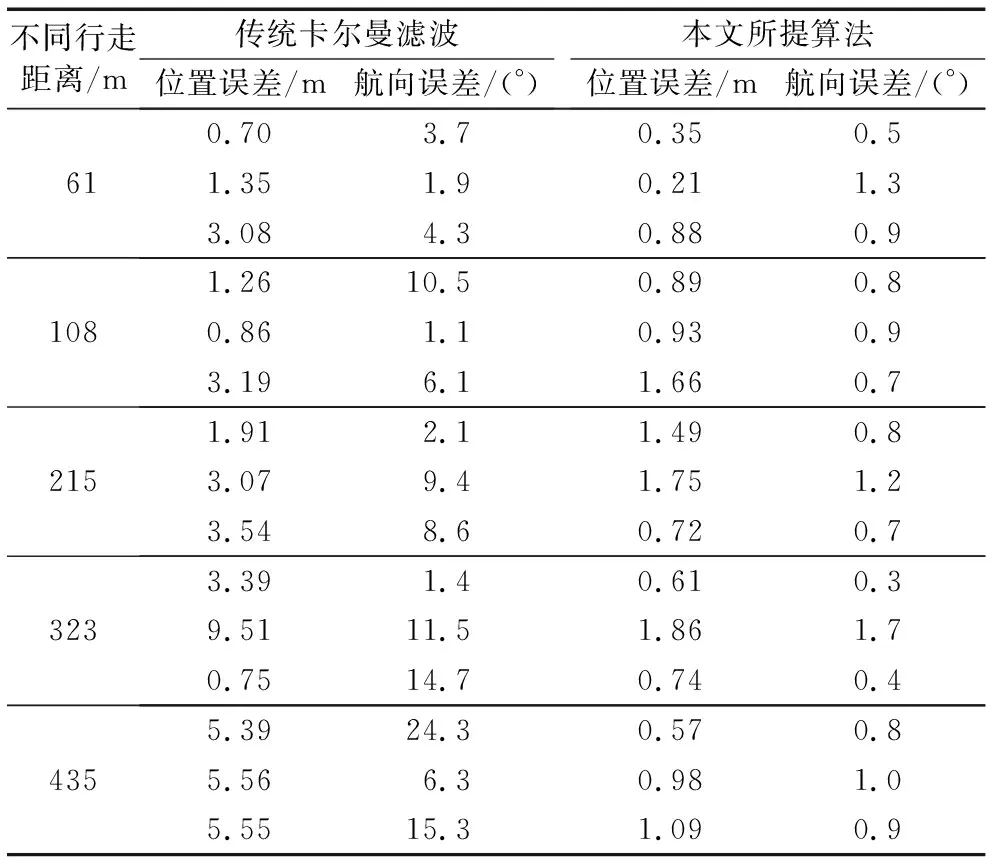
表1 不同距離重復實驗誤差統計Tab. 1 Error statistics of repeated experiments at different distances
傳統卡爾曼濾波定位算法和本文所提算法在不同距離情況下終點位置絕對誤差的對比如圖7所示,該圖數據是通過對所有重復實驗完成均值處理所得。由圖7可知,傳統卡爾曼濾波定位算法在不同行走距離情況下終點位置絕對誤差始終大于1.50 m,并且,隨著行走距離的增加,絕對誤差呈現出一種發散的趨勢,不斷增大;在行走距離超過400 m時,該算法絕對誤差達到了5.50 m,此時的相對誤差為1.3%左右。而本文所提算法在不同行走距離情況下的終點位置絕對誤差相對穩定,并且始終不超過1.50 m;在行走距離超過400 m時,該算法絕對誤差為0.87 m,此時的相對誤差僅為0.2%左右。通過兩種算法對比可知,無論是在特定行走距離方面,還是在隨著行走距離增大時的誤差趨勢方面,本文所提算法始終優于傳統的卡爾曼濾波算法,并且在行走距離大于400 m時,基于本文算法的位置精度提高了一個量級,表明了本文算法的有效性和穩定性。
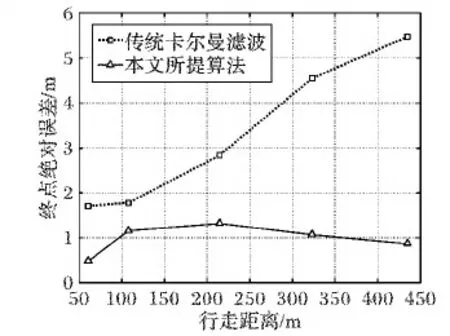
圖7 不同算法終點位置絕對誤差對比Fig. 7 Comparison of absolute error at end position of different algorithms
在航向校準方面,傳統的卡爾曼濾波算法只將航向作為狀態量之一,實際解算時還要完成包括位置、加速度、姿態角等多個參量共同的狀態轉移,該過程相對繁瑣且航向在長距離行走情景下依然會存在較大的偏移。而本文算法只對單一的航向參量進行粒子采樣和航向補償,并通過權重分配使得每一步落點都更靠近真實位置,計算過程相對簡潔。同時我們注意到,行人在行走時的單步真實航向只通過慣性傳感器本身很難進行數值標定,但在行走一段直線距離時,根據起始點位置計算的航向是相對準確且具有實際意義的。出于以上考慮,本文提出的航向算法在直線行走階段的解算是更加貼近該直線軌跡下的真實航向的。兩種算法航向誤差對比如圖8所示,圖中的航向解算就是以直走廊為參考得出的。
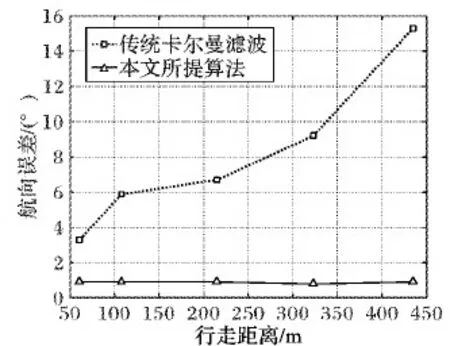
圖8 不同算法航向誤差對比Fig. 8 Comparison of heading error of different algorithms
由圖8可知,傳統卡爾曼濾波算法得到的航向誤差在行走距離為61 m時就超過了3°,并且隨著行走距離的增加,航向誤差不斷累積,在行走距離超過400 m時達到了15°以上。整體上,傳統卡爾曼濾波算法得到的航向誤差呈現發散趨勢,同時短距離時的較大誤差使得該算法難以在實際情境下直接應用。而本文提出的算法在實際測試過程中始終將航向誤差穩定在了0.9°以內,相比于傳統卡爾曼濾波算法,航向精度有了明顯的提高,驗證了本文算法的有效性和穩定性。
4 結語
針對在傳統卡爾曼濾波室內定位算法中航向累積誤差的問題,本文提出了室內環境約束的行人航向粒子濾波修正方法,在卡爾曼濾波的基礎上,結合室內環境信息,利用粒子濾波算法對航向進行修正,得到了更加精確的行人位置。本文主要貢獻如下:1)在粒子動態選取參照墻體的基礎上,構建粒子航向自修正機制,使補償后的粒子更趨近于行人行走方向。2)構建關聯通路偽測量數據的依距離賦權機制。通過確立合理的粒子賦權規則,在有效避免過擬合的基礎上提升了整體航向的精度。3)精簡了粒子濾波模型,將航向作為唯一的狀態量,在提高精度的同時方便了數據分析和處理。經過實際場景分距離多組重復實驗驗證,本文算法在減小行人定位絕對誤差和航向累積誤差方面的有效性及穩定性都明顯優于傳統卡爾曼濾波算法。但本文算法在底層數據降噪處理以及場景泛化方面存在著一定的局限性。未來工作中,一方面會基于已有成果改進粒子狀態轉移過程以進一步提高算法場景適用度;另一方面會融合多部位、多特征底層數據進行關聯研究,并將多數據關聯應用于已有算法預處理、狀態轉移和權重更新階段,以此進一步提高基于多數據融合的行人航向精度。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36