基于人工勢場法的多智能體編隊避障方法
2019-01-07 12:22:36鄭延斌席鵬雪王林林樊文鑫韓夢云
計算機應用 2018年12期
鄭延斌,席鵬雪,王林林,樊文鑫,韓夢云
(1.河南師范大學 計算機與信息工程學院,河南 新鄉(xiāng) 453007; 2.智慧商務與物聯(lián)網(wǎng)技術(shù)河南省工程實驗室,河南 新鄉(xiāng) 453007)(*通信作者電子郵箱xipengxue@163.com)
0 引言
多智能體編隊問題是指多智能體在執(zhí)行任務的過程中相互之間保持某種幾何形狀不變。編隊問題是多智能體系統(tǒng)研究的熱點問題之一,在許多領(lǐng)域都有很好的應用,如軍用、民用、游戲等。受環(huán)境因素的制約,多智能體編隊在執(zhí)行任務的過程中,不可避免地會遇到環(huán)境中的靜態(tài)障礙(如環(huán)境中的山川、河流、房屋、樹木等)和動態(tài)障礙(如環(huán)境中其他移動的智能體),如何合理地避開這些障礙物,又能最大限度地保持編隊隊形,是多智能體編隊研究的關(guān)鍵問題之一,目前研究者提出了許多解決的方法。
常用的多智能體編隊避障算法有:領(lǐng)航跟隨法[1]、人工勢場法(Artificial Potential Field method, APF)[2]、虛擬結(jié)構(gòu)法[3]、基于行為法[4]等。其中人工勢場法具有結(jié)構(gòu)簡單、實用性好、實時避障且路徑平滑的優(yōu)點,但容易陷入局部最優(yōu)。針對此問題研究者提出許多改進方法如:仇國慶等[5]提出了將多智能體系統(tǒng)與傳統(tǒng)遺傳算法相結(jié)合的編隊控制方法,利用最優(yōu)染色體調(diào)節(jié)智能體的運動參數(shù)至最佳狀態(tài),同時將領(lǐng)航跟隨法與人工勢場法結(jié)合,有效地保持隊形的穩(wěn)定性,人工勢場法中歸一化其超過最小安全距離的斥力,達到有效避障目的;Kowdiki等[6]提出了領(lǐng)航跟隨法框架的混合編隊控制技術(shù),用人工勢場法規(guī)劃領(lǐng)航智能體的導航路徑,使整個編隊控制具有穩(wěn)定性;Dang等[7]在動態(tài)環(huán)境下,利用旋轉(zhuǎn)勢場和排斥力使得機器人逃離障礙物并避免局部極小問題。編隊避障過程中存在的“局部困擾”[7-8]情況,加入了“回環(huán)力”,使多智能體編隊能夠通過障礙物區(qū)域。然而這些方法沒有考慮隨機性障礙物對編隊控制及避障的影響。
人工勢場法中增益系數(shù)設置的局限,使得該算法不適應隨機性障礙物的動態(tài)環(huán)境,近幾年為了增加避障算法的環(huán)境適應性,研究者對人工勢場法的增益系數(shù)進行改進,如:張立陽等[9]提出了將模糊控制法與人工勢場法結(jié)合,實時調(diào)整斥力與引力的增益系數(shù),實現(xiàn)軌跡跟蹤與避障;翟紅生等[10]提出了將量子粒子群算法引入到人工勢場法,優(yōu)化斥力與引力勢場的增益系數(shù),實時控制機器人的運動。這些方法解決的是單個智能體的避障問題,沒有涉及多個智能體的避障。有涉及多個智能體避障并修改其增益系數(shù)的方法,比如:Chatraei等[11]使用Mamdani模糊系統(tǒng)所給出的人工勢場斥力與引力的增益系數(shù)來驗證該系統(tǒng)的避障效果。
針對動態(tài)環(huán)境中,多智能體編隊耗時長、環(huán)境適應度差的問題[12],本文在動態(tài)隊形變換策略[12-13]的異構(gòu)模式下,使用人工勢場法對編隊中各個智能體實時規(guī)劃避障;針對人工勢場的引力增量系數(shù)和斥力增量系數(shù)設置的局限,利用布谷鳥搜索算法(Cuckoo Search algorithm, CS)[14],隨機搜索適合當前環(huán)境的引力和斥力增量系數(shù)。使用效率函數(shù)對實驗的數(shù)據(jù)進行評價及分析,驗證本文優(yōu)化方法的合理性及有效性。
1 相關(guān)基礎
1.1 多智能體動態(tài)隊形變換避障策略
多智能體編隊在進行編隊避障時,需要根據(jù)所處環(huán)境的約束,進行實時有效的避障。本文用文獻[13]提出的伸縮因子,選擇適合的編隊隊形避障方法。伸縮因子是指多個智能體組成的隊形維持現(xiàn)有形狀不變,只是在大小上實現(xiàn)伸縮的參數(shù)[13]。伸縮因子用符號ρ表示,ρ≥ρm,而ρm表示隊形伸縮因子的閾值。利用伸縮因子來確定避障的隊形變換模式指令σ(σ∈{σi|0,1,2|}),伸縮因子計算式如式(1)所示:
ρ=Dmax/D
(1)
其中:D表示智能體小組隊列的寬度;Dmax表示障礙環(huán)境下智能體小組運行路線的可通行路徑的最大寬度。
動態(tài)隊形變化策略的模式如下:
1)零變換模式(σ=0):若ρ≥1,則Dmax≥D,表明編隊中的智能體不需要改變現(xiàn)有隊形即可通過障礙區(qū)。
2)同構(gòu)變換模式(σ=1):若ρ<1且ρ≥ρm,表明智能體編隊不能直接通過障礙區(qū),但是可以壓縮隊形大小、不改變隊形形狀的方式通過障礙區(qū)。
3)異構(gòu)變換模式(σ=2):當兩種模式均不成立時,即ρ<ρm時,表明只能破壞多智能體編隊現(xiàn)有的隊形,才能通過障礙區(qū)。
1.2 人工勢場法
傳統(tǒng)人工勢場法的基本思想是編隊中各個智能體所處的環(huán)境充斥著混合勢力場,環(huán)境中的目標點充斥著引力勢場,方向是由智能體指向目標點;環(huán)境中的障礙物充斥著斥力勢場,方向是由障礙物斥力的合力指向智能體。多智能體編隊在人工勢場法的引力和斥力的合力狀態(tài)下朝向目標點運動,并且規(guī)劃出一條平滑無碰撞的路徑。
1.2.1 引力勢場函數(shù)
在混合勢場中,目標點對于智能體產(chǎn)生引力,算法中所用到的引力勢場函數(shù)如式(2)所示:
Uatt(q)=katt×(q-qg)2/2
(2)
式中:Uatt(q)為引力場;q為當前的智能體;katt為引力增量系數(shù),其值大于零;qg為智能體與目標點的相對距離。引力Fatt(q)是由引力勢場函數(shù)的負梯度所得,計算式為式(3)所示:
Fatt(q)=-▽Uatt(q)=-katt|q-qg|
(3)
1.2.2 斥力勢場函數(shù)
在混合勢場中,障礙物對于智能體產(chǎn)生斥力,算法中所用到的斥力勢場函數(shù),計算式如式(4)所示:
(4)
式中:q-q0表示多智能體與障礙物的距離;ρ0為障礙物的影響距離;krep為斥力增量系數(shù)。斥力Frep(q)是由斥力勢場函數(shù)的負梯度所得,大小為式(5)所示:
Frep(q)=-▽Urep(q)=
(5)
文獻[15]在斥力的分量進行了改進,解決了人工勢場法的局部極小值問題,如式(6)~(7)所示:
(6)

(7)
則在混合勢場中,智能體所受的合力如式(8)所示:
(8)
1.3 布谷鳥搜索算法
布谷鳥搜索算法(CS)是由Yang等[14]提出的一種群智能優(yōu)化算法,也是一種新型的啟發(fā)式搜索算法。該算法思想來自于布谷鳥的繁殖行為和育雛習性,主要的兩個策略是布谷鳥的巢寄繁殖方式和萊維飛行(Lěvy flight)機制。通過隨機游走的方式搜索得到一個最優(yōu)的鳥窩來孵化自己的鳥蛋,這種方式可以達到一種高效的尋優(yōu)模式[16]。萊維飛行是一類非高斯隨機過程,其平穩(wěn)增量服從Lěvy穩(wěn)定分布[17],其優(yōu)點是在飛行過程中,利用步長較小的短距離與較大步長的長距離行走相互交替,提高了全局搜索能力,不易陷入局部最優(yōu)。利用L(λ)的隨機搜索路徑思想,隨機步長的Lěvy分布如(9)所示:
L(s,λ)~s-λ; 1<λ≤3
(9)
式中s為萊維飛行得到的隨機步長。
2 基于APF與CS的編隊避障方法
針對動態(tài)環(huán)境下的隨機性障礙物,使用動態(tài)隊形變化策略下的異構(gòu)模式進行編隊避障,并利用布谷鳥搜索算法(CS)改進人工勢場法(APF)的增益系數(shù)設置的局限,用領(lǐng)航跟隨法[1]控制編隊隊形,本文提出了基于APF與CS的編隊避障方法。
2.1 改進引力與斥力的增益系數(shù)
考慮到環(huán)境障礙物的隨機分布特性,故利用布谷鳥搜索算法中萊維飛行機制的隨機搜索思想,產(chǎn)生增量系數(shù),消除增量系數(shù)的固定值所帶來的局限性。
使用萊維飛行機制的Lěvy分布函數(shù)式(9),改進引力場函數(shù)中的增量系數(shù)katt和斥力場函數(shù)的增量系數(shù)krep,由于編隊方向始終是朝向目標點的引力方向,式(9)所產(chǎn)生的集合,故選擇引力增量系數(shù)與斥力增量系數(shù)的值分別如式(10)、(11)所示:
katt=max(a-λ);λ∈(1,3]
(10)
krep=min(a-λ);λ∈(1,3]
(11)
式中a是由萊維飛行得到的隨機增量系數(shù)。
改進式(2)、(4),如下所示:
(12)

(13)
改進后對應的引力與斥力如式(14)、(15)所示:
Fatt(q)=-▽Uatt(q)=-a-λ|q-qg|
(14)
Frep(q)=-▽Urep(q)=
(15)
2.2 效率函數(shù)
環(huán)境適應度函數(shù)[12-13]用來評價編隊隊形適應當前環(huán)境的程度,其值越小,說明該隊形變換對環(huán)境的適應度越好,計算式如式(16)所示:
fenvfit=Ifdd+Iect+Ifcct
(16)
其中:Ifdd表示為隊形失真度;Iecr表示為能量消耗率;Ifcct表示為隊形變換收斂時間比。
本文為了驗證多智能體編隊在隨機性障礙物環(huán)境的適應性,利用方差作為效率函數(shù)評價避障方法的有效性和合理性,如式(17)所示:
fenvfit=Iδ
(17)
式中:Iδ表示編隊避障過程的時間方差,其值越小說明編隊避障方法的環(huán)境適應性越強。
2.3 多智能體編隊避障方法
該方法的主要思想為:先建立常用的智能體隊形知識庫,當檢測到障礙物區(qū)域僅有有一條路徑,計算伸縮因子,選擇適合當前避障的最佳隊形;檢測到多條路徑時,使用人工勢場法
進行編隊避障,并使用領(lǐng)航跟隨法保持隊形通過障礙區(qū)。多智能體編隊避障流程如圖1所示。

圖1 多智能體編隊避障方法流程Fig. 1 Flow chart of obstacle avoidance method of multi-agent formation
3 仿真實驗及分析
為了充分驗證本文方法的有效性和合理性,進行了3組仿真實驗。選取的編隊隊形為V型(此隊形的密集編隊覆蓋觀察角最大,不易丟失隊形),使用領(lǐng)航跟隨法控制編隊隊形。每個智能體的速度為0.1 m/s,勻速運動,隊形的夾角設置為45°,環(huán)境中的障礙物個數(shù)設為150(障礙物的位置隨機生成)。為了適應環(huán)境中不同方向的編隊避障,選取3個方向:(0,π/4),π/4,(π/4,π/2),對應3個目標點為:(15,23),(23,23),(23,15)。每組實驗對比3種方法,每種方法實驗10次,得到相應編隊避障時間結(jié)果數(shù)據(jù)如表1所示,編隊避障時間是指編隊從初始點到目標點整個過程所需的時間。從表1中可以看出,本文方法的避障效率更高。
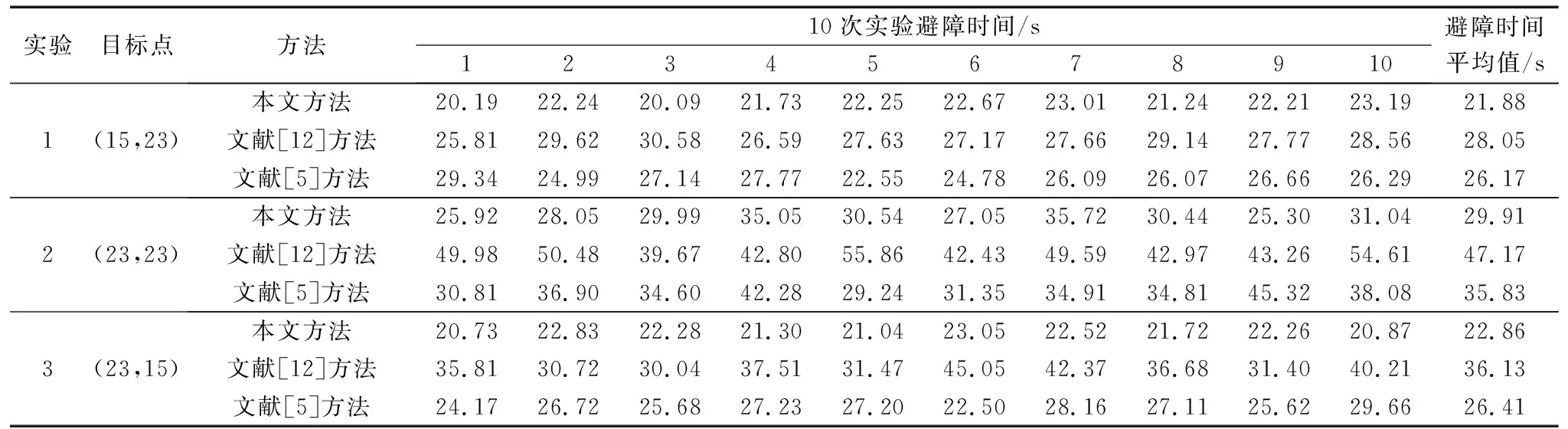
表1 不同方法10次實驗編隊避障時間Tab. 1 Formation obstacle avoidance time of different methods in ten experiments
實驗1 選取的目標點是(15,23),V型編隊中的每個智能體的初始坐標分別是(0,0),(-1,1),(-1,-1),(-2,2),(-2,-2)。(0,0)點是領(lǐng)航智能體的坐標,其他的是跟隨智能體坐標。選擇本文方法、文獻[12]方法和文獻[5]方法,針對隨機障礙物的不同分布情況做了10次實驗,對應最優(yōu)的多智能體編隊避障圖如圖2中所示。
由圖2(a)可知,在隨機障礙物分布的環(huán)境中,多智能體編隊從開始點計算伸縮因子選擇異構(gòu)模式的人工勢場法進行動態(tài)避障,平滑的避障軌跡經(jīng)過障礙物區(qū)域,過程中用領(lǐng)航跟隨法保持編隊隊形。從整個編隊避障時間可以得出,本文方法優(yōu)于文獻[12]方法、文獻[5]方法,隊形保持相對穩(wěn)定。
由圖2(b)中可知,環(huán)境中的隨機障礙物個數(shù)多,文獻[12]方法用環(huán)境適應度函數(shù)獲得最佳隊形,使用的是柱型編隊進行避障。V型編隊從初始隊形變換成柱型隊形,然后開始進行編隊避障,到達目標點恢復到原來的隊形。此方法在初始點編隊隊形變換目標隊形需要一定的時間,在到達目標點后恢復到原來的隊形也需要時間,這兩次的時間增加了整個編隊避障的時間。
從圖2(c)中可知,在避障過程中編隊的隊形無法保持良好,文獻[5]方法是編隊避障過程中,利用遺傳算法得到最優(yōu)染色體,進行反變化換形成解數(shù)據(jù),得到智能體的姿態(tài)信息,動態(tài)調(diào)整編隊中的智能體。雖然此方法可以將智能體的運動參數(shù)調(diào)整到最佳狀態(tài),但是在障礙物個數(shù)多的環(huán)境中,這樣的方法實時調(diào)整智能體的姿態(tài)反而增加了等待時間,整個編隊避障效率將會降低。
實驗2 選取的目標點是(23,23),選用本文方法、文獻[12]方法與文獻[5]方法進行對比,三種方法相應最優(yōu)的多智能體編隊避圖如圖3所示。
從圖3可知,本文方法的多智能體編隊避障時間是相比較優(yōu)的,而且在避障過程中的編隊隊形保持良好;文獻[5]方法在避障過程中沒有保持好隊形,但比文獻[12]方法的編隊避障時間優(yōu);文獻[12]雖然避障時間較長,但在編隊過程中不用考慮隊形保持問題。
實驗3 選取的目標點是(23,15),選用本文方法、文獻[12]方法與文獻[5]方法進行對比,三種方法相應最優(yōu)的多智能體編隊避如圖4所示。

圖2 實驗1不同方法最優(yōu)多智能體編隊避障(目標點(15,23))Fig. 2 Optimal multi-agent formation obstacle avoidance of different methods in experiment 1 (object point (15, 23))

圖3 實驗2不同方法最優(yōu)多智能體編隊避障(目標點(23,23))Fig. 3 Optimal multi-agent formation obstacle avoidance of different methods in experiment 2 (object point (23,23))

圖4 實驗3不同方法最優(yōu)多智能體編隊避障(目標點(23,15))Fig. 4 Optimal multi-agent formation obstacle avoidance of different methods in experiment 3 (object point (23,15))
從圖4可知,本文方法的多智能體編隊避障時間相比較優(yōu),本文方法與文獻[5]方法的編隊隊形都能保持隊形。
為了進一步驗證本文方法的性能,使用隨機障礙物進行50次實驗,對本文方法、文獻[12]方法與文獻[5]方法作對比,結(jié)果如圖5所示。由圖5可知,本文方法在不同目標點的避障時間都優(yōu)于文獻[12]方法和文獻[5]方法。

圖5 不同目標點不同方法的50次實驗結(jié)果對比Fig. 5 50 experimental result comparison of different methods with different target points
使用效率函數(shù)對這10次以及50次的各個目標點編隊避障進行評價,結(jié)果如圖6所示。由圖6可知,本文方法的編隊避障時間方差相比文獻[12]方法、文獻[5]方法偏低,表明本文方法在隨機障礙物分布的動態(tài)環(huán)境下,具有較好的環(huán)境適應性以及避障高效性。

圖6 不同方法10次及50次實驗避障時間方差對比Fig. 6 Variance comparison of obstacle avoidance time for different methods between 10 and 50 experiments
4 結(jié)語
本文提出了一種人工勢場法與布谷鳥搜索算法相結(jié)合的多智能體編隊避障方法,考慮隨機性障礙物對動態(tài)隊形變換策略的影響,改進異構(gòu)模式下的避障方法。首先,根據(jù)檢測到的障礙物信息,計算伸縮因子選擇異構(gòu)模式,在此模式下使用人工勢場法進行編隊避障,為每個智能體規(guī)劃平滑無碰撞的路徑,并用領(lǐng)航跟隨法保持編隊的隊形;其次,針對人工勢場法的引力增益系數(shù)和斥力增益系數(shù)設置的局限性,使用布谷鳥搜索算法中萊維飛行機制的隨機搜索思想,搜索出適應環(huán)境的增益系數(shù),增強了人工勢場法的環(huán)境適應性。仿真實驗結(jié)果驗證了所提方法既能動態(tài)控制編隊避障和隊形,又能適應當前環(huán)境。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34