一種高精地圖道路三維線形測量方法
2019-01-07 00:57:40羅文婷
測繪通報 2018年12期
關鍵詞:測量
羅文婷,李 林
(福建農林大學交通與土木工程學院,福建 福州 350000)
大數據基礎下構建三維高精地圖是自動駕駛不可或缺的一部分[1]。傳統地圖并不能滿足自動駕駛的需求,主要由于:①局部更新較難,無法及時反映高頻率的道路改、修、擴建[2-3];②地圖精度較低,無法滿足自動駕駛操作的要求[4-5];③二維地圖無法立體反映多層車道交互重疊關系[6]。目前國內外眾多學者及研究機構對自動駕駛高精地圖展開了深入研究。這些研究主要利用慣導系統、激光雷達、全景相機等車載設備采集道路信息數據,通過相應算法提取道路線形信息,從而構建高精地圖[7-10]。慣導系統是目前最廣泛采用的測量設備,主要通過采集車行駛軌跡來提取道路線形信息[11-13]。這種方法采集效率高,數據更新便捷,能采集道路橫縱坡度等三維線形信息[14-16]。通過方位角變化規律定位平面線形中的圓直/直圓點,利用傾斜角、俯仰角標定道路橫縱坡度[17-18]。Imran提出了一種通過多輛車行駛軌跡獲取道路線形信息的方法[19],但如果普遍行駛軌跡發生偏移,其所獲取的道路線形信息仍存在一定誤差。
綜上所述,目前高精地圖繪制技術在區域覆蓋、更新頻率、地圖精度上都較傳統GIS地圖有較大提升,然而受采集車自身顛簸、行駛偏移的影響,獲取的道路線形信息準確度仍有待提高。本文采用慣導系統及LiDAR系統獲取道路信息,利用采集車行駛中的傾角及車輪運轉距離描繪車輛行駛軌跡,并結合激光點云數據進行道路線形信息的提取校正。
1 數據采集
1.1 數據采集設備
本研究采用數據采集設備如圖1所示。慣性測量單元安裝于采集車兩軸的中心位置,可測量車輛在運行過程中x、y、z軸方向的傾角及加速度變化。輪距測量儀安裝于采集車左后輪,用于測量車輪的運轉距離,同時與慣性測量單元及LiDAR系統相連,并向其發送脈沖值。三維LiDAR系統由兩組激光發射器及8組三維激光相機構成,分兩組懸掛于采集車尾部兩側,兩組設備間相距2 m,距離地面1.65 m。三維LiDAR系統能夠在高速(100 km/h)狀態下采集2D/3D激光數據,數據覆蓋寬度為4 m。
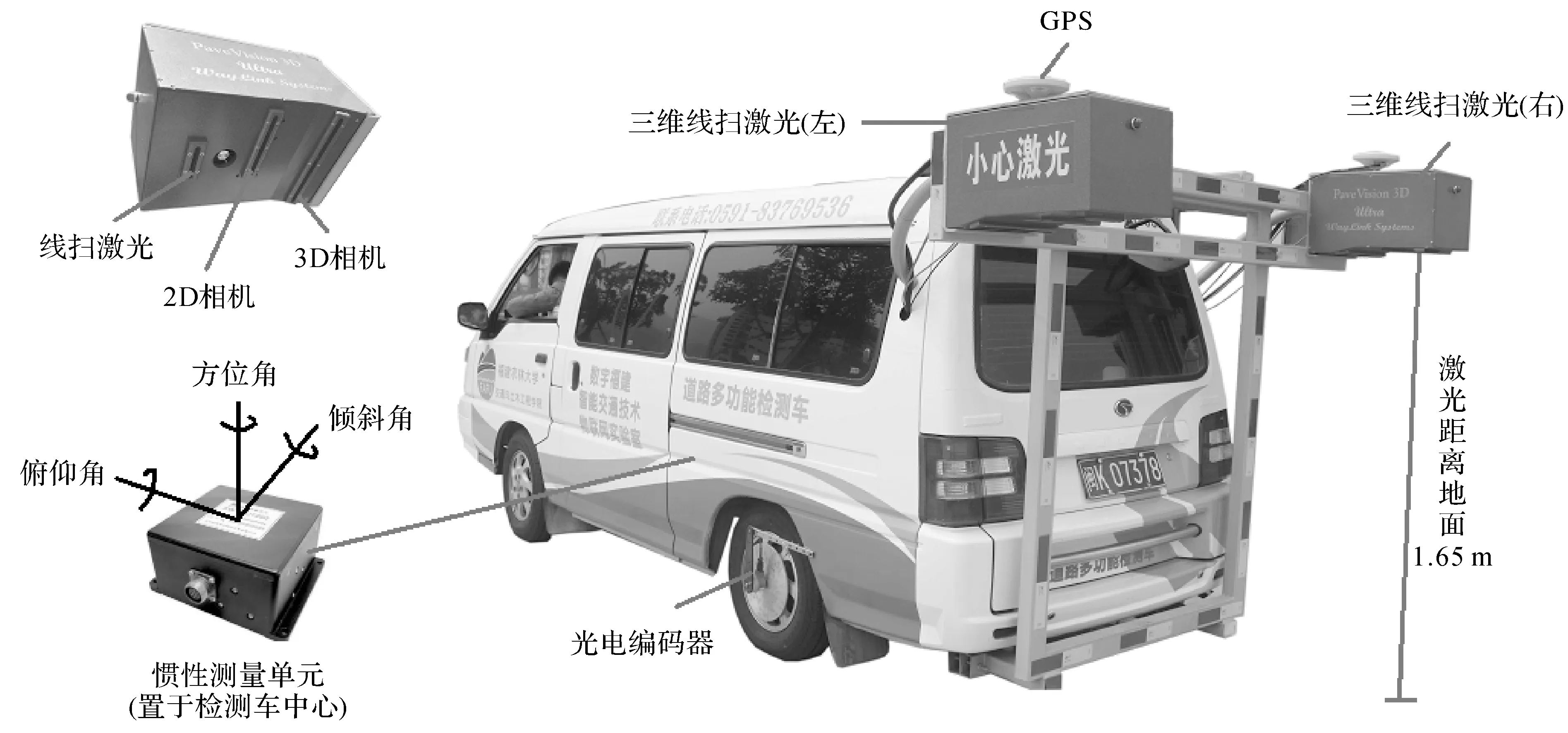
圖1 數據采集車外觀及車載設備架構
1.2 數據采集規劃
本文采集了福州市浦上大橋互通式立交各車道及匝道的三維線形數據,包括圓曲線匝道7條、直線車道9條。每次數據采集均以同一起點為坐標原點。經過原點標定后,可消除復雜的車道及匝道拼接工作,對不同批次采集的數據進行坐標統一。
2 道路線形信息的提取算法
2.1 車輛橫向偏移位移的測量計算
采集車在行駛過程中的橫向偏移,會導致行駛軌跡偏移車道中心線。研究利用路面二維圖像數據進行車道邊緣線識別定位,通過其在圖像上的坐標位置,標定采集車相對于車道中心線的偏移位移。具體方法敘述如下。
2.1.1 路面二維激光圖像二值化
在二值化處理中,如果閾值過小,不能找出邊緣線;如果閾值太大,則造成二值化圖像中的噪音(非目標對象)增加,進而加大邊緣線識別難度[20-21]。本研究利用改進大津法進行圖像二值化處理,閾值的具體計算見式(1)。車道邊緣線原圖如圖2(a)所示,二值化處理實施效果如圖2(b)所示。
(1)
式中,Pi為灰度值為i的像素數在像素總數所占比例;t為分割閾值,取值范圍為0~L-1。
2.1.2 車道邊緣線缺損填充
由于車道邊緣線的陳舊及脫漆,二值化處理生成的車道邊緣線會存在脫空或不連續現象,如圖2(b)所示。為填補邊緣線的脫空及不連續區域,采用膨脹后腐蝕算法,該方法通過選擇合適的結構元素,對二值化圖像進行卷積運算,進而填充邊緣線內部空洞,連接不連續的區域,使其更加平滑完整。其實施效果如圖2(c)所示。
2.1.3 車道邊緣線識別定位
利用Canny算法對圖2(c)中的車道邊緣線進行邊緣檢測。對其邊緣進行基于非零像素值的閉環遍歷,確定邊緣線的幾何輪廓,并根據幾何輪廓的形狀及尺寸,剔除非邊緣線的噪音影響。最后,根據幾何輪廓及尺寸,確定邊緣線的坐標位置。其實施效果如圖2(d)所示。

圖2 車道邊緣線自動識別
2.1.4 采集車橫向偏移位移計算
激光路面圖像中心線可定義為采集車行駛軌跡中心,結合車道邊緣線坐標位置,可獲取車道中心線軌跡。由于車輛偏移及邊緣線虛線段的存在,圖像所捕獲的車道邊緣線會出現3種情況:雙側邊緣線均被捕捉、僅單側邊緣線被捕捉、雙側邊緣線均未被捕捉。針對不同情況,行駛偏移量的測量如圖3所示。首先在雙側邊緣線被捕捉的圖像上計算車道寬度,根據車道寬度計算單一邊緣線圖像中的車輛偏移;雙側邊緣線均未被捕捉時,鑒于行駛軌跡的連續性,取前后圖像偏移位移的均值作為該張圖像的車輛偏移位移。
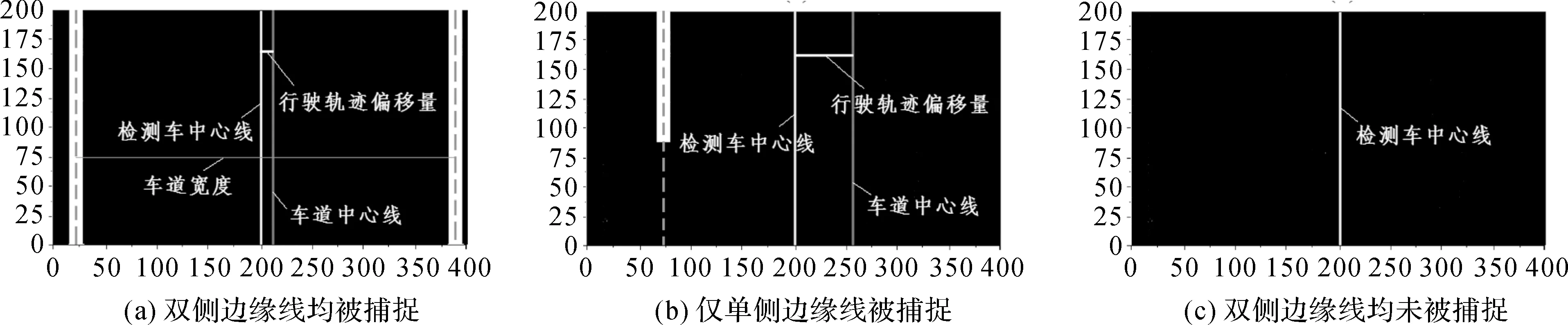
圖3 偏移量的計算
2.2 道路平面行駛軌跡的提取校正
利用慣導系統采集的方位角數據及輪距測量儀記錄的輪軸運轉距離,描繪采集車平面行駛軌跡。參照采集車行駛軌跡及其相對于車道中心線的偏移位移,獲取車道中心線平面線形軌跡為
(2)
(3)

2.3 圓曲線段線形要素的測量計算
2.3.1 平面線形變化分界點識別定位
本文利用線性擬合算法消除采集車方位角過渡變化的影響,從而確定圓直/直圓點的精確位置。該方法包含以下具體步驟:①在過渡段間任選一節點為候選節點進行標記,如圖4(a)所示;②以候選節點為參照,移除其前后若干個方位角樣本數據,如圖4(b)所示;③對被切斷的若干近似直線的數據片段進行線性擬合,并延長擬合直線使其相交。依據交點的橫坐標,標記道路平面線形變化的分界點,如圖4(c)所示。
2.3.2 圓曲線半徑測量計算
本文在已獲取的車道中心線軌跡及圓直/直圓點的精確位置基礎上,結合弦線支距法計算車道的圓曲線半徑為
(4)
2.4 道路橫縱坡度的測量校正
2.4.1 道路橫坡度的測量校正
本文利用三維LiDAR系統對橫坡度原始測量值進行校正。三維LiDAR系統對稱平行懸掛于采集車尾部的兩端,其所采集的路面橫剖線坡度反映了采集車與路面間的夾角γ。結合測量所得的θ和γ角,可計算道路真實橫坡度值為
(5)
式中,γ為路面與采集車間的夾角;θ為采集車相對水平面的橫向傾角;e為路面橫坡度;yL為激光點云數據左邊緣路面高度信息;yR為激光點云數據右邊緣路面高度信息;W為路面寬度。
在實際的呼吸功能訓練環節主要采用以下手段對患者進行輔助。分別為:縮唇呼吸、腹式呼吸以及前身放松訓練等。根據患者的實際情況來對具體的康復訓練手段進行選取。首先患者需要模仿護理人員示范的呼吸方式,引導患者進行加深呼吸的訓練。其頻率不應太快,應保持在每分鐘十六至十八次,整個過程也應保持在二十至三十分鐘之間。除此之外,鼓勵患者進行一定的肢體運動。例如雙臂的前后上下活動便是其中十分有效的一種,這個過程對于護理人員的要求便是在患者無力的情況時,輔助患者進行相關運動的開展。該環節的持續時間應保持在三分鐘左右,每天進行的次數約為六到十次。
2.4.2 道路縱坡度的測量校正
道路不平整會引起車輛顛簸,導致數據噪聲波動。雙邊濾波法具有保邊去噪的效果,即僅除去局部數據噪聲而保留數據自身特性。因此本文采用該算法消除縱坡度原始數據噪聲,校正車輛顛簸帶來的誤差。
3 三維高精地圖的構建
結合提出的一系列道路線形要素自動提取校正算法,將研究采集的浦上大橋互通式立交道路信息數據進行整理,繪制精度為10 cm的三維高精地圖,其繪制過程主要包括:車道中心線平面軌跡的提取、平面底圖的繪制、三維線形信息的導入。
3.1 車道中心線軌跡的提取
共進行了4次數據采集。首先提取并校正采集車各批次的平面行駛軌跡;然后以各批次數據的同一坐標原點為參照,將不同批次的平面行駛軌跡數據在同一坐標系上疊加;最后對疊加生成的行駛軌跡圖層進行修剪,去除由于繞道重復采集的車道及匝道信息。
3.2 平面底圖的繪制
提取車道中心線軌跡信息,定位圓直/直圓點,計算圓曲線半徑。以車道中心線為基準,依據所測車道寬度,定位車道邊緣。根據路面二維激光圖像上所獲取的道路標線信息及其坐標位置,在高精地圖平面底圖上進行添加。圖5為浦上大橋互通式立交高精地圖平面底圖,其中圓直/直圓點經緯度坐標、圓曲線半徑信息及車道標線均在底圖上進行了標注。
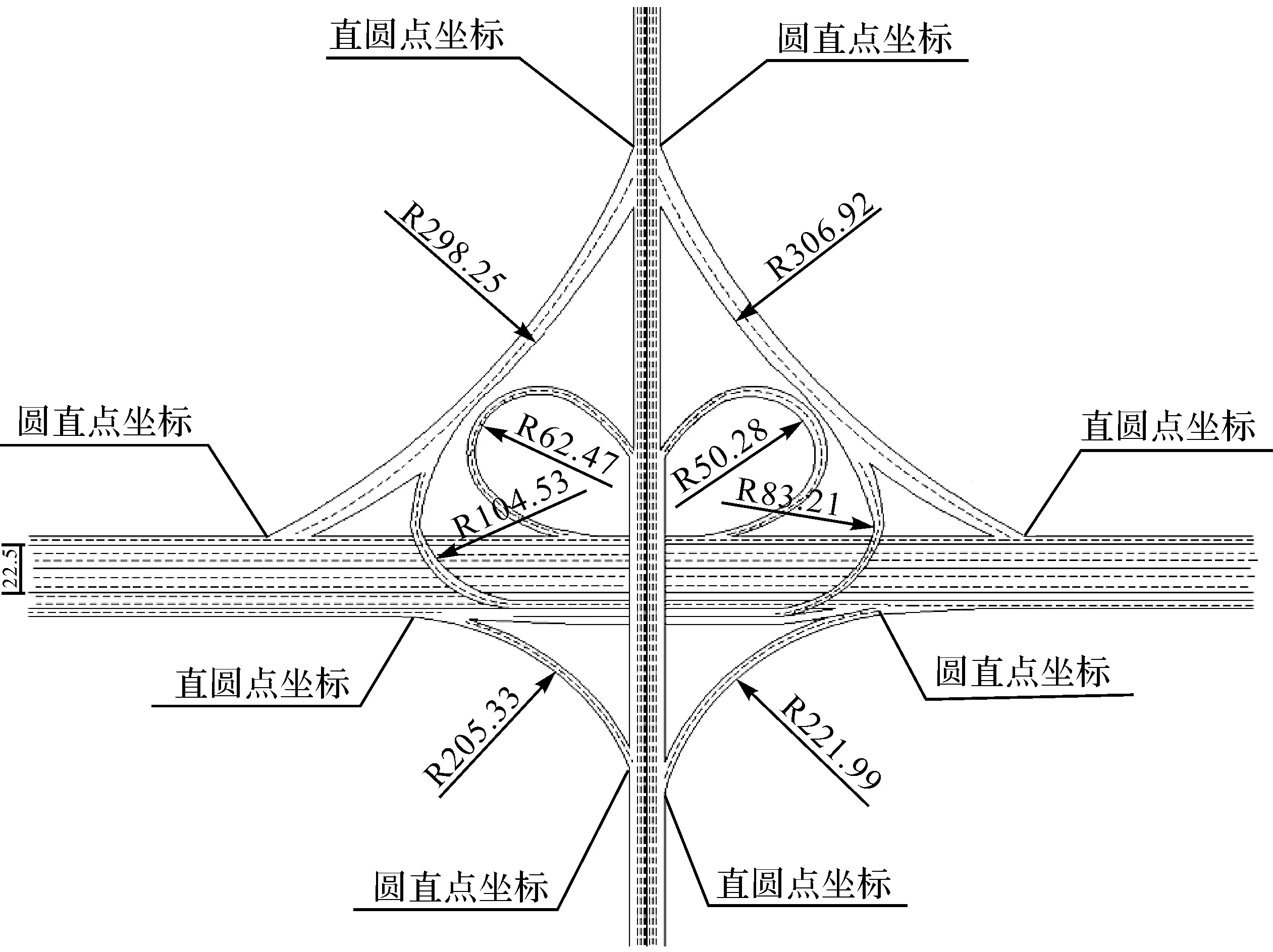
圖5 高精地圖平面底圖
3.3 三維線形信息的導入
三維高精地圖是在平面底圖基礎上,結合車道橫縱坡度信息,添加車道上各點的Z軸坐標來搭建實現。主要包括3個步驟:①面底圖微元單元格坐標構建:將車道平面劃分為微元單元格,確定每個微元單元格平面坐標。本文采用10 cm×10 cm微元單元格,將平面底圖轉化為點云數據。②車道縱坡度信息的添加:以平面底圖的坐標原點為起點,將車道中心線各點縱坡值換算成Z軸方向高度信息。標記車道中心線所在的單元格,導入車道中心線各單元格Z軸坐標。③車道橫坡度信息的添加:結合車道中心線Z軸坐標值與車道橫坡度,計算并導入車道橫剖線上各單元格Z軸坐標(高度信息)。
4 精準度驗證試驗
4.1 平面線形要素測量結果驗證
在圓直/直圓點附近,將3 m直尺與道路切線段標線重合。平移3 m尺,直至直尺與標線分離,將分離點確定為圓直/直圓點。圓曲線段內隨機選取兩點,通過全站儀測量兩點間的弦線及支距長度,利用弦線支距法計算圓曲線半徑。
4.1.2 平面線形要素精準度驗證結果
將人工測量的圓直/直圓點位置信息作為參照值,計算高精地圖中圓直/直圓點相對于參照值的偏差。定義偏差與參照值的比值為定位誤差。與此類似,計算圓曲線半徑自動測量的誤差。其中,圓直點的平均定位誤差為2.97%,直圓點的平均定位誤差為2.54%,圓曲線半徑測量的平均誤差為1.16%。
4.2 橫縱坡度測量結果驗證
4.2.1 橫縱坡度人工測量方法
本文抽取1條車道及2條匝道為驗證路段,每隔5 m取1抽檢點,共計90個抽檢點。采用數顯坡度測量儀器測量路面坡度:道路橫坡度的測量點布設于車道左右標線的位置,取其平均值為橫坡度驗證參照值;道路縱坡度的測量點布設于車道左右標線處及車道中心線處,取平均值為縱坡度驗證參照值。
4.2.2 橫縱坡度精準度驗證結果
本文采用Dunnett統計學方法計算道路橫縱坡度自動測量結果與參照值之間的偏差。相似性閾值取0.05,圖6為抽檢點的橫縱坡度自動測量結果與驗證參照值。通過Dunnett統計方法得出橫縱坡度的驗證結果P值分別為0.631和0.945,該結果說明抽檢點自動測量結果與參照值并未存在明顯差異。
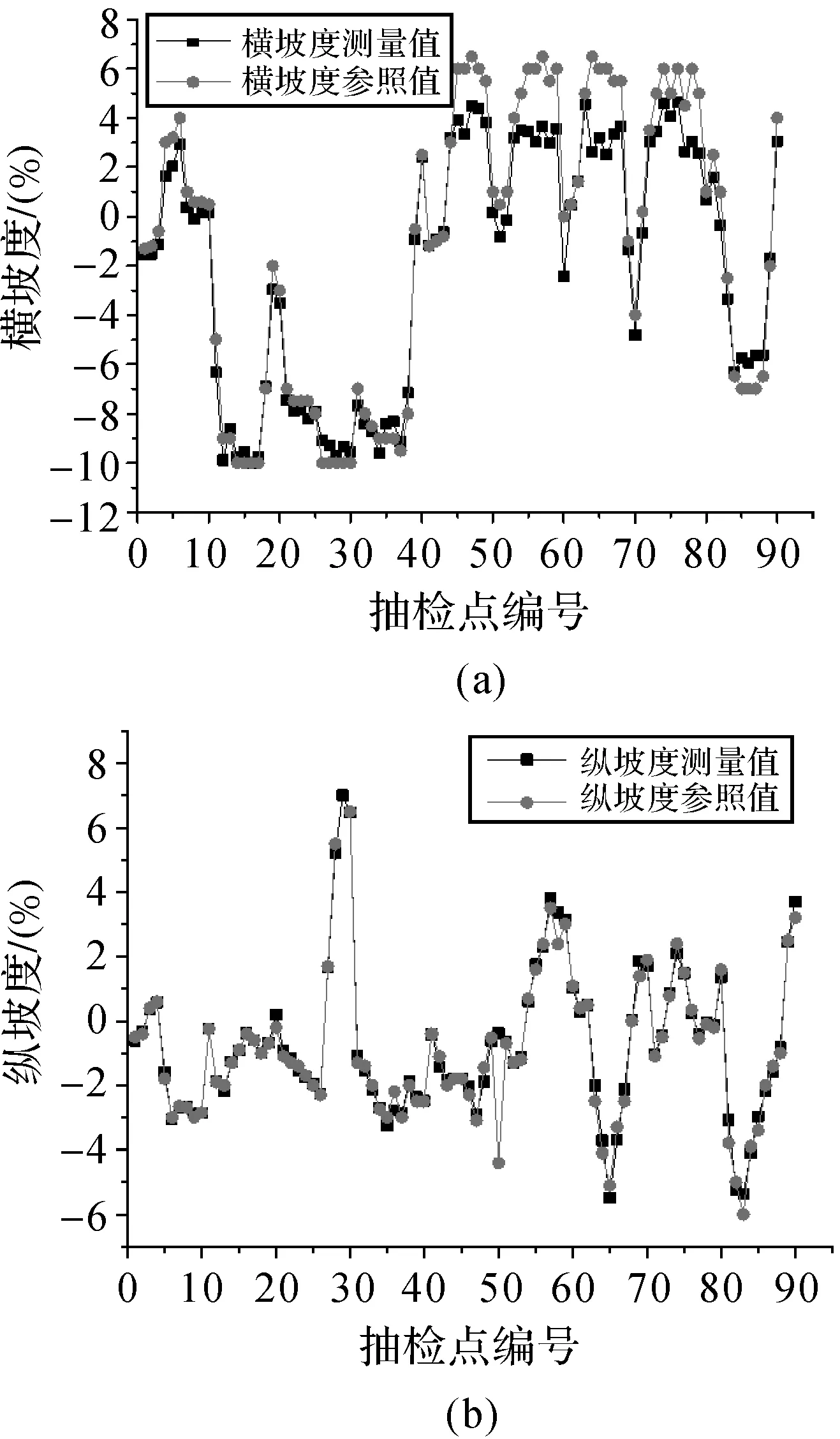
圖6 道路坡度測量驗證結果
5 結 論
本文通過車載LiDAR系統及慣導系統高效采集車輛行駛軌跡數據及路面激光點云數據,通過一系列算法提取并校正道路三維線形信息,并以福州市浦上大橋互通式立交為例,構建用于自動及輔助駕駛的三維高精地圖。本文的主要結論如下:
(1) 同步匹配車載LiDAR系統及慣性導航系統,實現高效數據采集、多源數據融合;結合多源數據提出一系列消除由采集車橫向偏移、顛簸、傾斜所造成的在道路線形信息提取上的必然缺陷的方法。
(2) 利用線性擬合算法、弦線支距法等自動提取道路三維線形信息,構建精度為10 cm的三維高精地圖;并通過實地人工測量驗證三維高精地圖的精準性,其中圓直點定位、直圓點定位、圓曲線半徑測量的誤差分別為2.97%、2.54%、1.16%;基于Dunnett統計方法的道路橫縱坡度的精準性驗證,P值分別為0.631和0.945,誤差計算結果及Dunnett試驗結果表明三維高精地圖各線形要素具有較高的準確性。
(3) 提出了一系列基于車載設備的道路信息數據采集、線形信息提取,以及三維高精地圖構建方法,可應用于自動駕駛及輔助駕駛導航系統,為智慧公路的應用奠定了技術基礎。同時,本研究也可應用于道路竣工驗收及線形資料的補充完善。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21