某型海底動力電纜敷設船錨泊系統設計
2019-01-11 12:25:34殷俊俊劉樂樂潘方豪王顥然張志剛
船舶 2018年6期
殷俊俊 劉樂樂 潘方豪 王顥然 張志剛
(1.中國船舶及海洋工程設計研究院 上海200011;2. 浙江省啟明電力集團公司海纜工程公司 舟山316000)
引 言
電纜敷設船(CLV)主要用于海上風電場海、島嶼間互聯供電的海底電纜敷設施工作業以及海纜檢修作業。根據不同海域的作業條件,目前已經建造出具有各類設備和尺寸齊全的電纜敷設船。本文以某型非自航方駁型電纜敷設船(下文簡稱“布纜船”)為目標,設計出滿足作業及規范法規要求的牽引移船系統和錨泊定位系統。通常非自航的駁船需要依靠拖船進行拖帶航行。電纜敷設時,駁船通過拖船和(或)沿電纜路由上放置的錨來拖行前進來進行海底電纜敷設,如圖1所示。
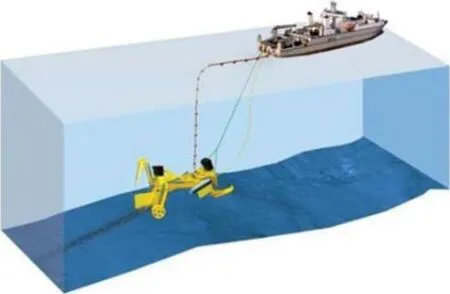
圖1 典型電纜鋪設示意圖
常規布纜作業移船工況時一般采用單點錨泊系統,利用絞車收纜牽引移船,定位工況時采用4點錨泊定位。然而這種移船和定位方式抵御風浪能力較弱,并且移船和定位工況模式切換慢,無法及時響應。本船采用8點錨泊定位和移船系統,移船工況時采用8點錨輪替翻錨移船,定位工況時8點和4點定位均可,能夠適應較高海況作業,迅速實現移船和定位錨泊模式的切換,提高了系統可靠性,可進一步降低布纜時電纜的損壞率。而且錨泊系統作為海上定位和移船系統有著作業性價比高、可靠性好、節能環保,后期更易檢修維護的特點。
1 電纜敷設船(布纜船)概況
為保證5 000 t海底動力電纜的裝載、轉運和海底敷設作業,本船采用了方首尾的平底重載平甲板駁船船型。該船的主尺度參見表1,實船外型參見圖2。
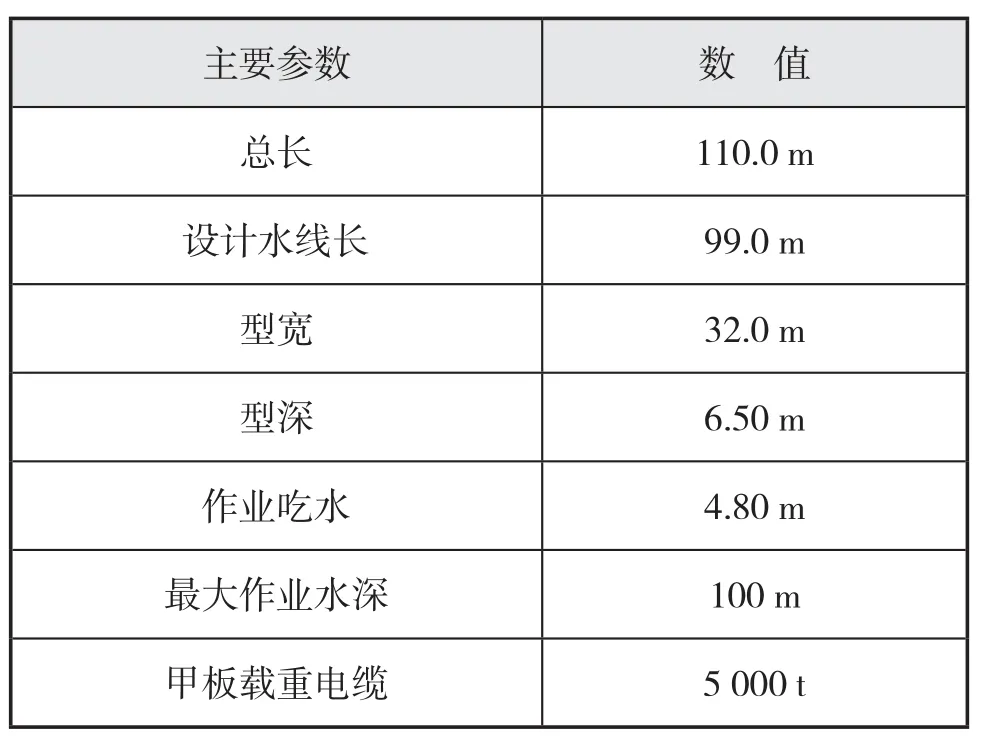
表1 電纜船主尺度
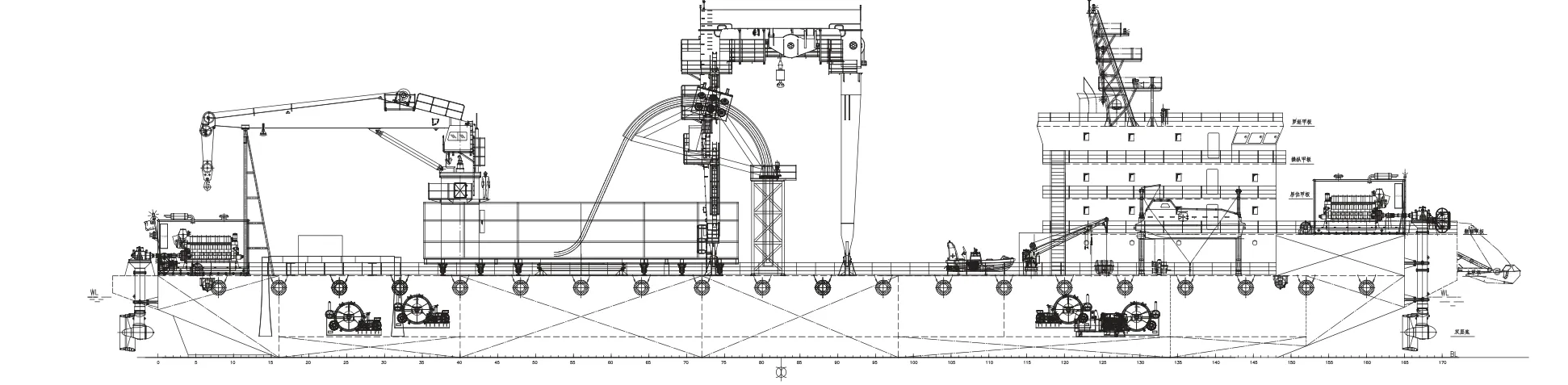
圖2 電纜船總布置概貌圖
2 環境條件
錨泊定位環境條件分為作業條件和生存條件。作業條件是保證起布纜作業時不超過允許偏移范圍的最大環境條件。生存條件考慮船舶不作業時依靠錨泊系統能在海上支持的最大設計條件,此時允許船舶有較大的偏移。環境條件一般由用戶提出,通過系統分析,去核定所選的環境條件是否能達到使用要求。本船主要工作水域位于我國沿海舟山地區,綜合考慮當地環境條件和造價因素,最后給定如下設計。因此在錨泊系統設計時選取如下海況為作業工況和自存工況。該船設計為出現臺風時和有纜破損時候停止作業。作業工況和自存工況的風浪流條件如下頁表2和表3所示。
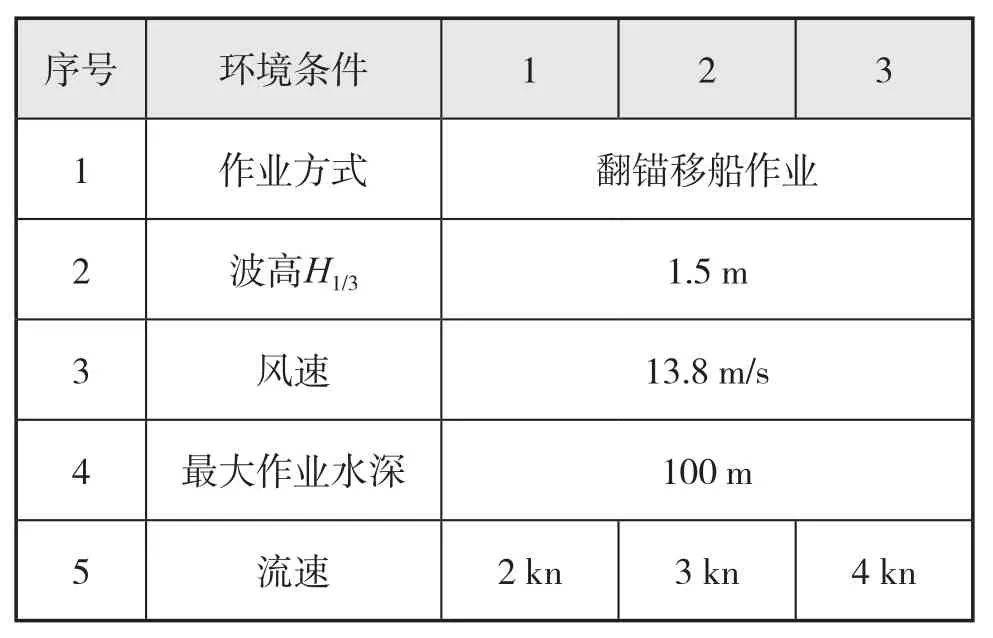
表2 作業工況
3 布錨形式
錨泊系統初步選用8點定位方式,能夠同時滿足輪替移船系統作業要求。作業工況布錨方式如圖3所示,自存工況布錨方式如圖4所示,移船過程如下頁圖5所示。錨索為鋼絲繩,具體參數如下頁表4所示。

表3 自存工況
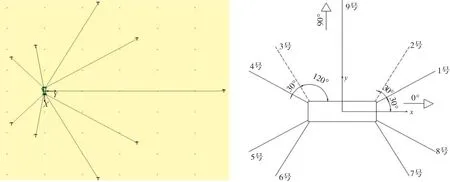
圖3 作業工況八點翻錨作業布錨方式
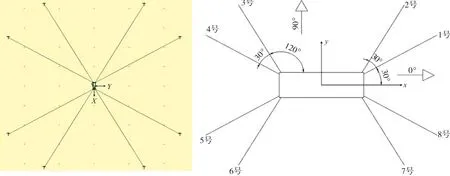
圖4 自存工況八點錨泊定位布錨方式
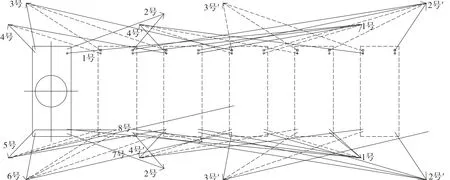
圖5 電纜船8點翻錨輪替移船過程示意圖

表4 纜-鏈錨索系統組成及參數
4 設計衡準
本船錨泊系統根據CCS相關規范和API-RP-2SK進行設計。當出現臺風時或者發生鋼索損壞時,停止作業并撤離。該錨泊系統分別按照完整作業工況和完整自存工況進行分析,并對最大張力錨索破斷時的情況進行分析校核,如表5所示。
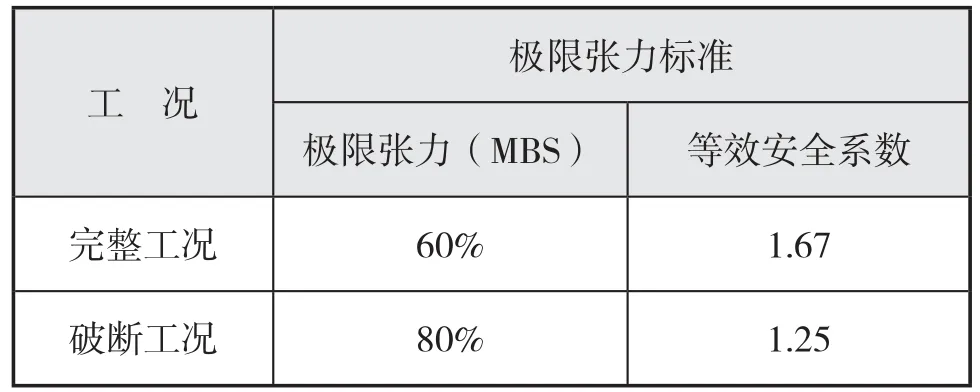
表5 極限張力和安全系數
5 錨泊定位系統分析
5.1 錨泊定位系統分析方法
本船錨泊定位分析采用DNV SESAM軟件的HydroD水動力計算模塊和Mimosa錨泊分析模塊進行計算,系泊計算采用頻域準動態分析方法。
5.1.1 準動態分析方法
準靜態分析法中,先靜態偏移系泊船,再在承載最大錨索的導索點處施加合適的波浪運動,以考慮波浪動力載荷。準靜力分析法中,先靜態偏移系泊船,再在承載最大錨索的導鎖點處施加合適的波浪運動,以考慮波浪動力載荷。在該法中,忽略了導索點的垂直運動,以及與錨索質量、阻尼、流體動力等有關動力效應。準靜力分析法的程序:
(1)確定錨泊系統靜剛度特性。應考慮錨索的彈性伸長,特別對淺水中繃的較緊的錨泊系統尤應予以考慮。此外,視具體情況,尚應計及海流、海底傾斜以及海底與錨索之間摩擦等影響。
(3)確定平均偏移處的錨泊剛度,根據此錨泊剛度,進行系泊船低頻運動分析,以確定系泊船低頻運動有效及最大單幅值。
(4)確定系泊船波頻運動有效及最大單幅值。
(5)確定船最大偏移和錨索最大張力。
(6)確定錨索最大懸掛長度,對不能承受上拔力的錨設備,最大懸掛索長應小于舷外索長。
(7)確定錨最大載荷,錨承受的最大載荷應按式(1)確定:

式中:Tmax為錨索最大張力,kN;W為錨索單位長度水中質量,kg;h為水深,m;F為錨索與海底間摩擦力,kN。
5.1.2 船體的平均位置
船體在靜平衡位置,各外力作用下的合力或合力矩為0,如式(2)所示:

5.1.3 船體的波頻運動
船體的波頻運動通過各Airy波對應的運動響應線性疊加而成。坐標點位于(x,y)處,t時刻的波面高度可表示為式(3)所示:

式中:n為Airy波的個數;ai,ωi和φi分別為第i個Airy波的波幅、圓頻率和相位;β為入射波浪的傳播方向;ki為波數。
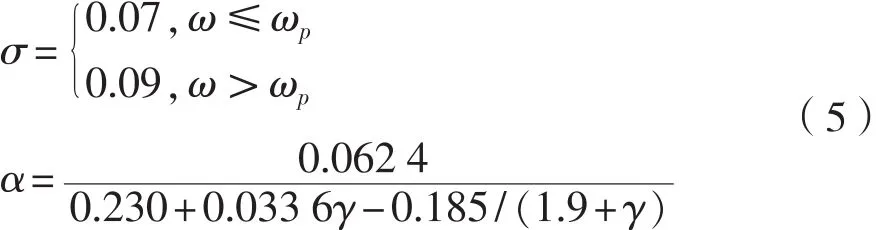
能量譜密度函數如式(4)所示:

式中:g為加速度;ωp為譜峰頻率;γ為形狀參數,β=1.25,σ參數和α參數可由式(5)得出:
假設隨機波浪的形狀參數為2.05,譜峰周期Tp為14.0 s,有義波高Hs為9.0 m,其能量譜密度曲線如圖6所示。
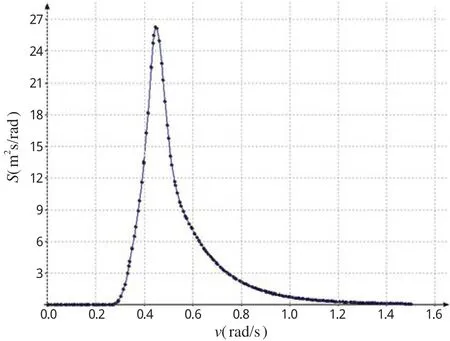
圖6 波浪譜密度函數曲線
選擇合理的頻率區間(ωm,ωM),并將其分成均等的n份,第i個Airy波的幅值ai可表示為式(6)所示:

隨機波浪的時間歷程為:

船體重心位置處,相對平衡位置的波頻運動時歷為:
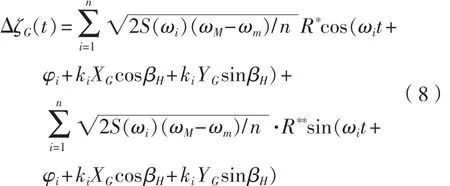
式中:R*和R**分別為船體運動響應的同相位和反相位幅值;βH為入射角度;XG和YG為船體重心處的平衡位置。
5.1.4 船體的低頻運動
船體三個方向上的低頻運動通過式(9)求解:
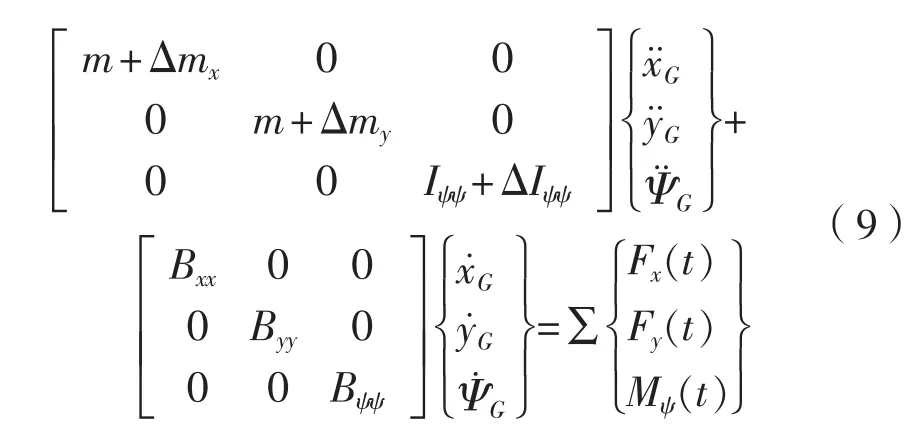
式中:m為船體質量;Iψψ為船體首搖轉動慣量;分別為x和y方向的附加質量;為首搖方向的附加轉動慣量;Bxx、Byy和Bψψ為三個方向的阻尼系數; xG、yG和ΨG為船體重心位置處的橫蕩運動、縱蕩運動和首搖運動;和船體在三個方向所受的風浪流作用力。
電纜敷設船重心處總的運動位移時歷由平均位移、低頻位移和波頻位移組合而成。將該運動時歷加至系泊纜頂端,便可計算出系泊纜各處的張力。
5.2 錨泊定位系統分析計算
5.2.1 風載荷計算
風作用在電纜船水上部分的力通常包括三個分量,即縱向力,橫向力和繞垂向軸的首搖力矩。確定風載荷最精確可靠的方法是在風洞中進行模型試驗,但風洞試驗所需時間較長,并且代價較高,對每個目標船型都進行風洞試驗不切實際。在沒有風洞試驗資料的情況下,可根據API規范對風載荷的計算一般如下的采用如式(10)所示經驗公式:

式中:Fw為風載荷,kN;Cw= 0.615,kNs/m;Cs為形狀系數;Ch為高度系數;Vw為設計風速,m/s。
5.2.2 流載荷計算
電纜船的首尾向和側向海流力Fcs按式(11)計算。

式中:Ccs為半潛式船體海流力系數,取515.62 Ns2/ m4;Cd為曳力系數。圓柱形為0.5;Ac為所有水下圓柱形構件投影面積之和,m2;Af為所有水下平面構件投影面積之和,m2;Vc為設計流速,m/s。
5.2.3 水動力計算
通過HydroD水動力分析軟件計算得到一階波浪激勵力、二階平均漂移力、船體運動響應RAO和阻尼系數等。
5.2.4 錨泊定位計算
通過以上輸入條件結合錨泊系統配置參數確定錨泊系統剛度特性,針對不同環境條件得到相應的偏移及錨索張力。錨泊系統分析原理圖如圖7所示。
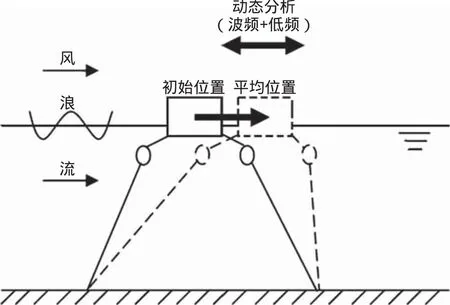
圖7 錨泊系統分析原理圖
5.3 錨泊定位系統組成
本船按8點錨泊系統配置錨設備。錨泊設備的組成如下:
錨索8根,為50 mm的鍍鋅鋼絲繩,長約1 500 m,破斷負荷約為1 580 kN。
錨8只,海洋工程大抓力錨STEVPRIS型,每只4 000 kg。
錨絞車8臺,電動變頻驅動。錨絞車工作拉力為約750 kN(第1層)。
5.4 錨泊定位系統分析結果
經過分析軟件計算,具體分析結果如下頁表6和表7所示,根據不同流速對應的定位能力參見下頁圖8和圖9。
從上可知,本船能夠在作業和自存工況下,實現如下能力:
5.4.1 作業工況(輪替翻錨移船)
(1)在2 kn流速、1.5 m波高,風速13.8 m/s時,可保持全浪向作業;
(2)在3 kn流速、1.5 m波高,風速13.8 m/s時,可保持有利船首尾±25°浪向作業;
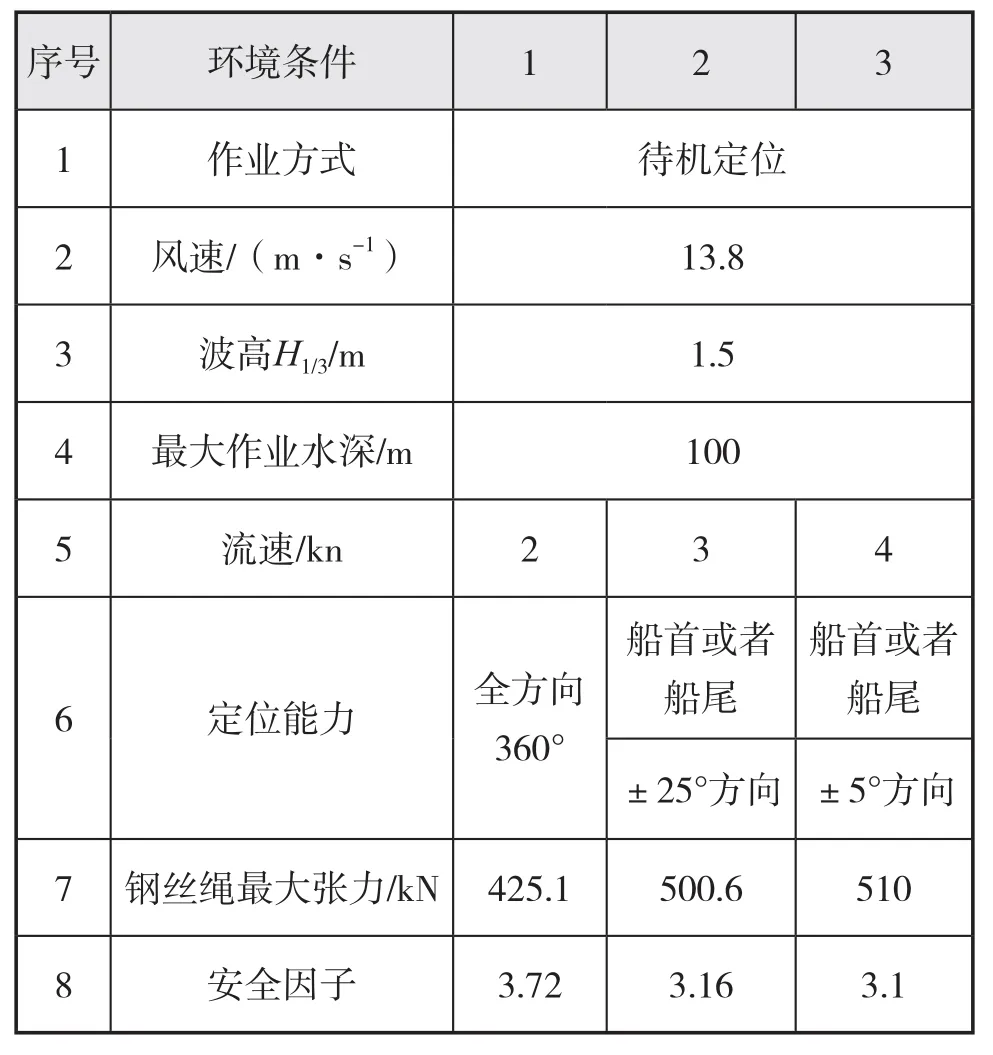
表6 作業工況錨泊系統定位能力
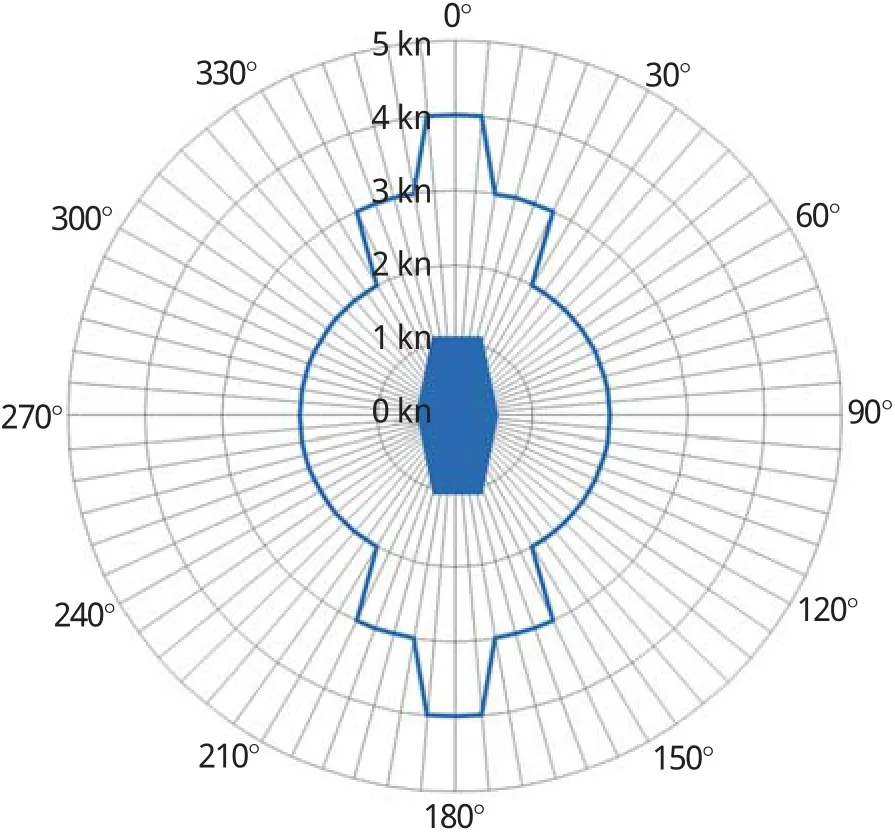
圖8 作業工況定位能力包絡圖
(3)在4 kn流速、1.5 m波高,風速13.8 m/s時,可保持有利船首尾±5°浪向作業。
5.4.2 自存工況
(1)在3.5 kn流速、2.0 m波高,風速13.8 m/s時,可保持全浪向定位;
(2)在4 kn流速、2.0 m波高,風速13.8 m/s時,可保持在船首尾±50°浪向下定位;
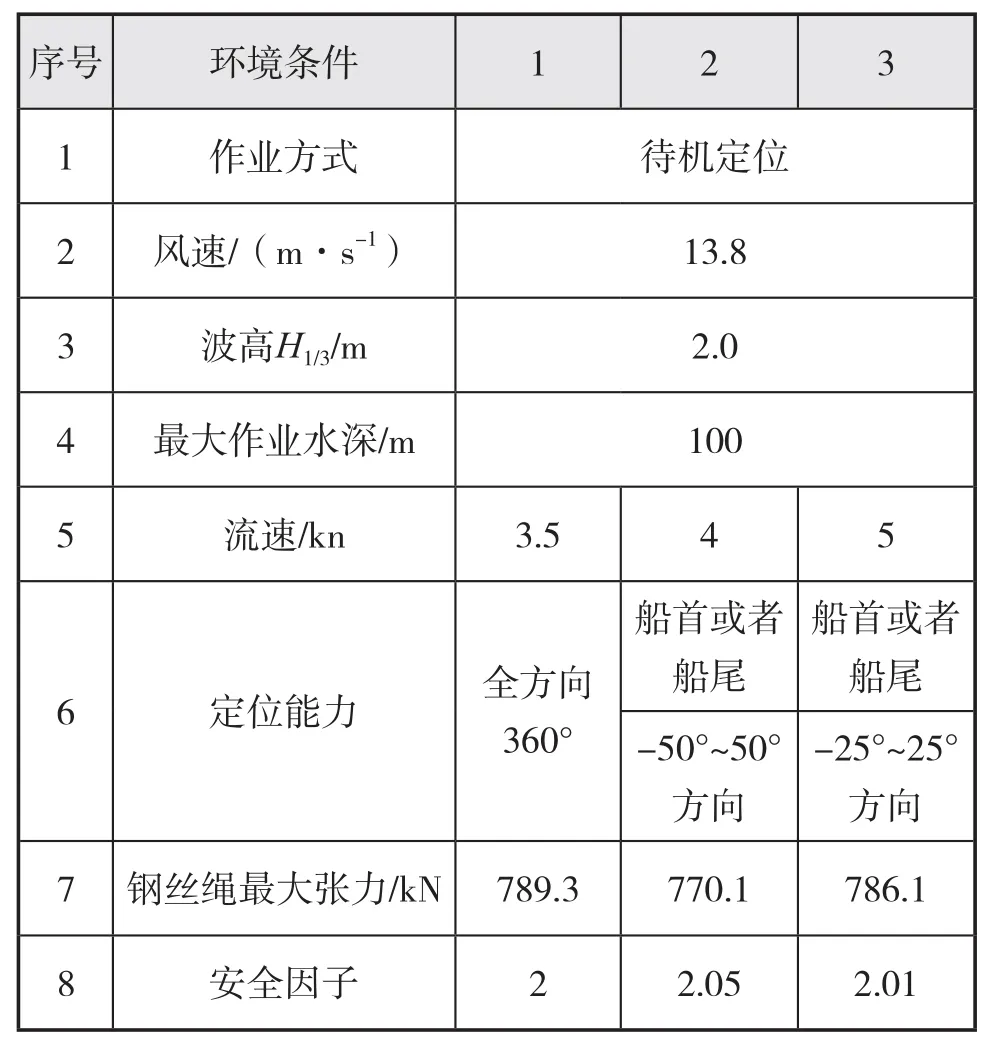
表7 作業工況錨泊系統定位能力
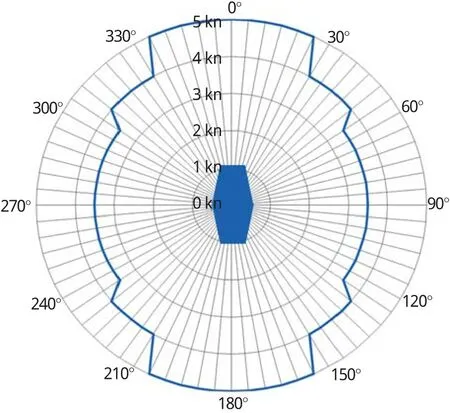
圖9 自存工況下定位能力包絡圖
(3)在5 kn流速、2.0 m波高,風速13.8 m/s時,可保持在船首尾±25°浪向下定位。
因此,本船錨泊系統能夠很好地滿足海纜作業的要求。
6 錨泊定位系統布置
錨泊定位系統布置見下頁圖10。
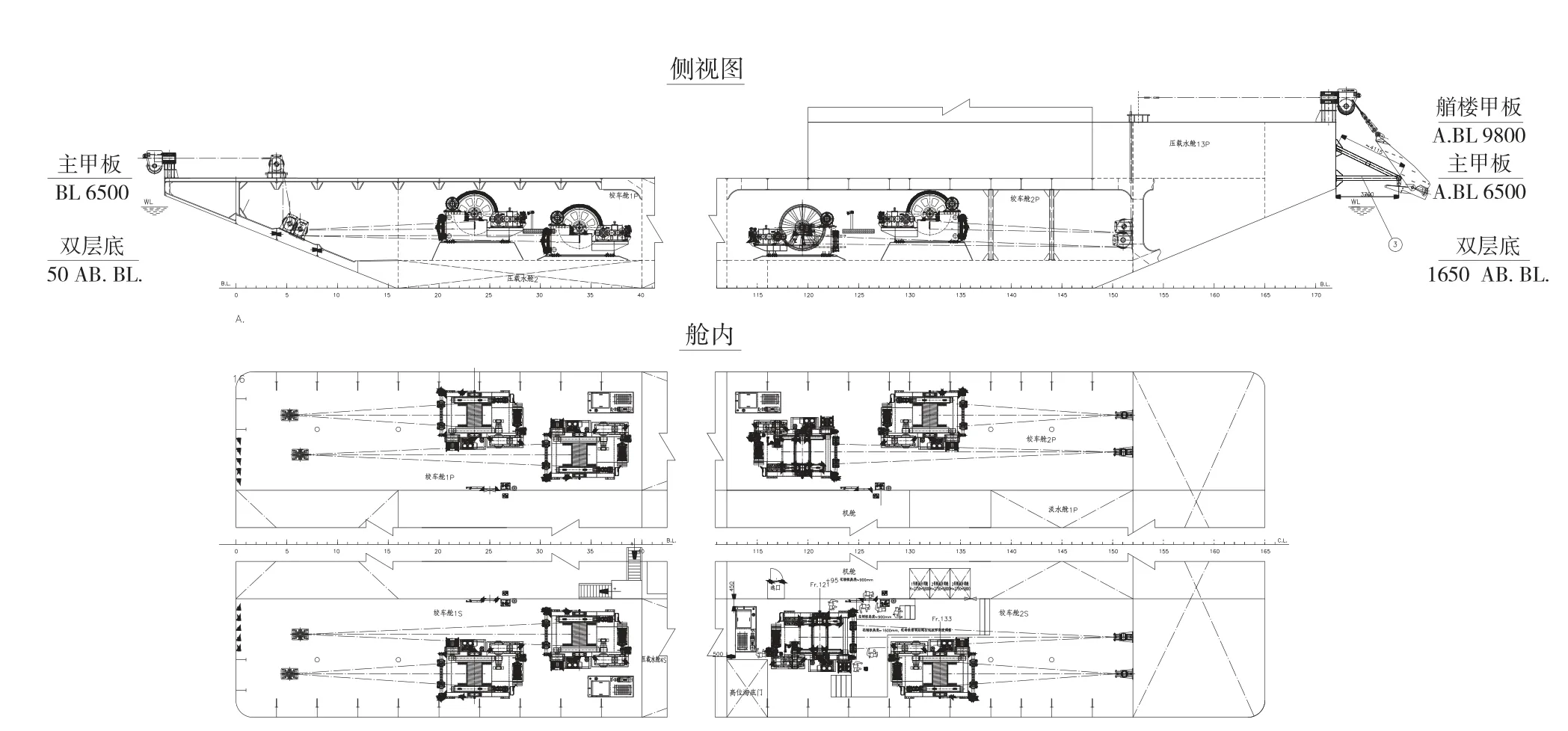
圖10 錨泊定位系統布置圖
7 結 語
通過對電纜敷設船錨泊系統的設計得到以下結論:
(1)在無拖船輔助的情況下,錨泊系統可在一定環境條件下實現移船作業;
(2)在移船作業過程中,前進方向的錨索不斷收回,水中的錨索長度逐漸變短,導致錨索的懸鏈線形式發生變化,當錨索無躺底段時錨端將會受到一定的上拔力,此時可能出現走錨的情況,所以在設計時應考慮不同水深下的最大可移船距離;
(3)本船的錨泊定位系統計算結果表明,錨泊系統設計能有效滿足海底電纜施工船的錨泊和布纜作業要求。本文提供一個可供參考的系統移船錨泊系統設計方法,可為起重船鋪管船等船型的錨泊系統設計提供類似參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08