多端差動保護的自同步技術
2019-01-16 02:48:58哈恒旭
電力與能源 2018年6期
哈恒旭
(GE電網方案策劃部英國有限公司,英國斯塔福德)
1 簡介
同步技術在差動保護中發揮了重要作用,因為差動電流是通過將本側同步電流和從對側傳來的接受電流(以信號瞬時采樣值形式或相量形式)相加而計算出的[1]。此時在本側測得的電流和從對側出來的接受電流之間存在一個時間差,它包括本側繼電器參考時間和對側繼電器之間的時間差異(信號瞬時值采樣時間差異)和通信時間延遲。
GPS既可以為非交換網絡也可以為交換網絡正確完成同步。GPS信號接收器可以每秒1個脈沖(1PPS)接收本側和對側繼電器信號。本側和對側繼電器之間的參考時間差可以通過每秒1個脈沖糾偏,通信時間延遲可以從對側傳來的信號瞬時值標注的時間標簽來計算[2-3]。譬如,如果本側繼電器在t1時接收到時間標識為t0的信號瞬時值,將此接收到的信號瞬時值與t0時的本地值排齊,用t1-t0即可計算出通信時間延遲(實際上不必計算)。因此,基于GPS的同步技術可靠而簡單,但是,如果GPS信號缺失,就會導致差動保護誤動作。
乒乓技術是一種不依賴外部同步裝置(如GPS)的自同步方法。本側向對側發出“乒”信號。當對側裝置接收到這個“乒”信號,它在下一個采樣時間發出一個“乓”信號,以及一個對側從接收到“乒”信號到發出“乓”信號之間的時間差信息。如此這般,當通信網絡的發送與接收通道一致時,就可以獲得采樣時間差以及通信時間延遲。很明顯,乒乓技術只能在非交換網絡中正確動作,因為此時發送和返回通信通道是一致的[4]。
事實上,在GPS同步技術廣泛用于線路差動保護[5]和故障定位[6-7]之前,人們就已經提出了多種所謂“參考相量同步”的自同步技術用于雙端輸電系統差動保護。基本概念是:在一個雙端系統中,在線路未發生故障情況下,從本側計算出的節點電壓(可以是線路上的任何一點)應該和從對側計算出的節點電壓一致。本側電流/電壓和接收到的對側傳來的電流/電壓之前的總時間差應該包含在線路無故障情況下計算得出的本側節點電壓和計算得出的接收到的電壓之間的相量差中。總時間差還應該包含在系統無故障情況下計算得出的本側節點電流和接收到的節點電流之間的相量差中[8]。
多端差動保護自同步技術,是一種基于節點電壓比較技術。但是,這種方法只適用于與僅一個節點相連的多端終端,對多終端多節點系統則不太適用[9]。
本文提出一種自同步技術新方法,它基于電流比較(基爾霍夫電流定律)而不是電壓比較[9],可以適用于任何多終端多節點的輸電系統拓撲網絡。本側電流/電壓和從對側接收到的電流/電壓之間的時間差可以通過將在本側計算出的流至遠方支線的節點電流與對側接收到的電流相比較而得出。基于電流比較,適用的自同步方法關鍵點在于流至遠方支線的電流可以依據本地終端的時間參考值,通過遠方支線的等效阻抗/導納計算得出,可以使用阻抗矩陣來計算流至遠方終端的電流,故障時用故障檢測儀來鎖定自同步功能。當故障發生時,時間差仍然保持穩態時測算值。
本文介紹的算法已經在商業產品中運用。有效結果顯示,計算出的時間延遲數值最大誤差低于0.08 ms,足夠滿足差動保護要求。
2 基本原理
為便于介紹這種用于多終端多節點系統、適用的自同步技術計算方法,采用從2個終端輸電系統開始講解,然后講解多終端、1個節點系統,最后到多終端多節點系統。
2.1 基于電流比較的兩終端輸電系統自同步技術
在一個兩終端輸電系統里,如果系統未發生故障,并且兩頭沒有時間差,那么從本側流入節點J(線路上的任意點)的電流應該與從對側流出的電流方向相反,且總和為0(就基爾霍夫電流定律),見圖1。

圖1 兩終端輸電系統

(1)

(2)
(3)
式中Td——總時間差。
兩側的同步可以通過將本側電流/電壓延時時長Td,和從對側接收到的電流/電壓取得一致而得以實現。
2.2 基于電流比較的多終端單節點輸電系統的自同步技術
為說明多終端單節點系統的自同步問題,則選取如圖2所示三終端系統作示例。
對多終端單節點系統而言,則無法直接給出本地終端和遠方終端之間的總時間差。
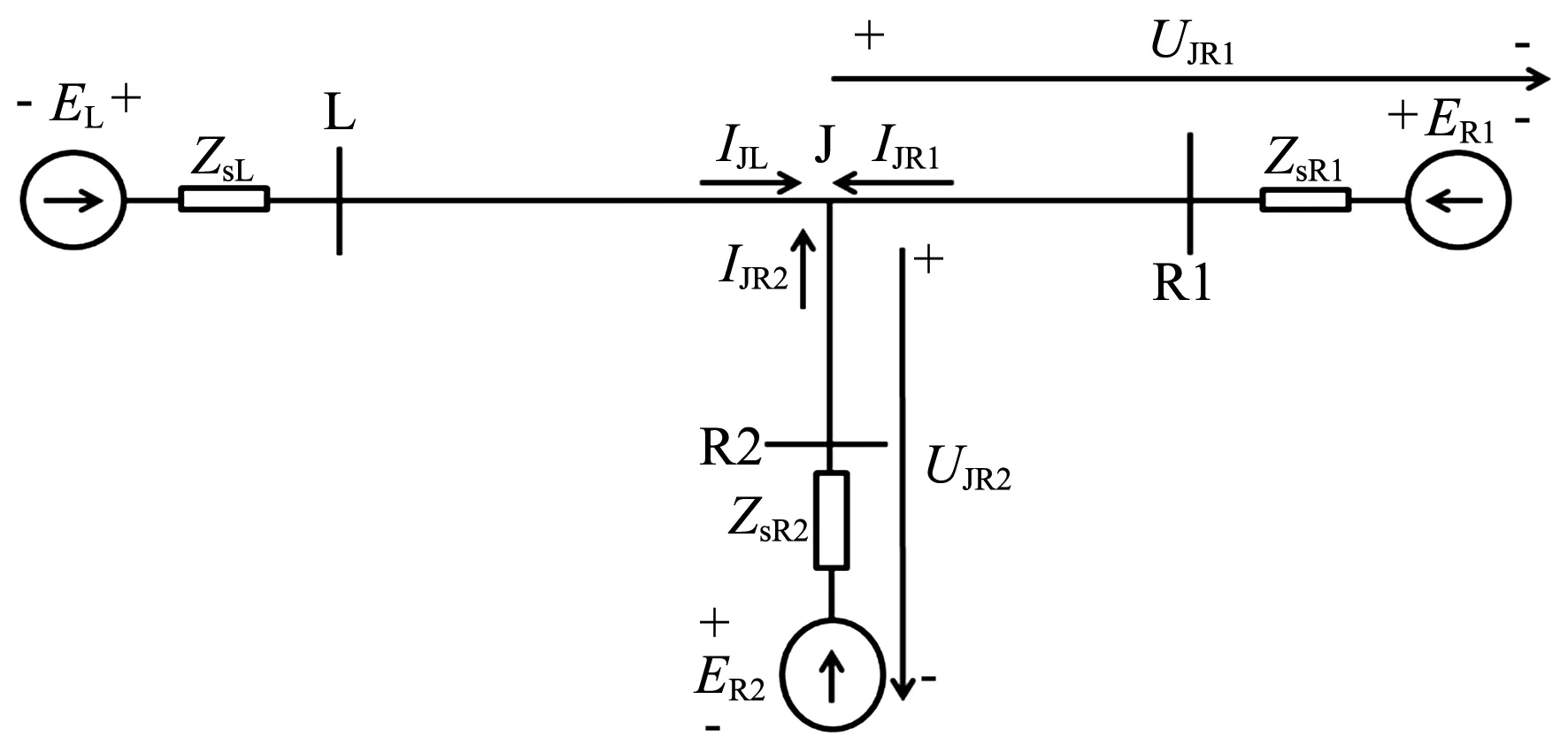
圖2 三終端系統示例
但是,遠方各節點(節點JR1和JR2)可以通過等效阻抗或導納列出等式,而等效阻抗或導納可以通過從每個遠方終端接收到的節點電壓和電流計算得出。
(4)

然后,通過每個遠方終端建立的等效導納,基于本側流出的節點電流,可以通過以下等式計算出從節點流向每個遠方終端的節點電流。
(5)

然后,通過將基于本側時間差值計算得出的節點電流與從遠方終端接收到的節點電流相比較,就可以計算出本側終端和遠方終端R1和R2之間的時間差。
(6)
這種方法可以通過以下方式從3個終端單個節點系統沿用到任意終端單個節點系統。
(1)計算出每個終端的節點電壓和節點電流。

(3)使用下列等式計算遠方終端的等效導納。
(7)
(4)基于本側節點電流,根據下列等式計算流向遠方終端的節點電流。
(8)
(5)計算第k個遠方終端與本側之間的時間差。
(9)
(6)同步可以通過延遲本側電流/電壓至所有遠方終端時間差的最大值Tdmax=max{Tdk}k=1,…,N-1并將自第k個遠方終端接收到的電流/電壓延遲至Tdmax-Tdk來實現。
2.3 基于電流比較的多終端多節點系統的自同步技術
為闡釋多終端多節點的自同步技術,采用一個如圖3所示的6終端、4節點輸電系統作示例。

圖3 6終端、4節點輸電系統示例
與只有1個節點的多終端系統相比,這里最大的難點在于,在這樣一個復雜的網絡中,如何根據本側節點電流IJ1L計算自相應節點,如IJ2R2_L,流入遠方終端的節點電流。
采用阻抗矩陣來計算相應的節點電壓,例如,利用當地節點電流IJ1L,和任何其它流入與節點相連的遠方終端的節點電流, 根據當地節點電流,如IJ2R2_L,計算出UJ2_L。
這樣一個復雜網絡的自同步技術分為以下步驟。
(1)構建一個初始的網絡阻抗矩陣,排除運算時間同步算式前已與終端相連接的部分(如圖3中以虛線標識的網絡部分)。這個矩陣可以標注為ZM。
(2)對與每個節點相連接的每個終端,計算出與終端電壓和電流相對應的節點電壓和節點電流。
(3)遠方終端的所有節點電壓和節點電流都發送至本地終端,利用式(7)計算出等效導納。
(4)將這些遠方終端的等效導納值相加,修改阻抗矩陣。修改后的阻抗矩陣可以標注為ZMR。
(5)將修改后的阻抗矩陣ZMR與電流相量(由本側節點電流和對側電流“0”組成)相乘,計算出所有的節點電壓。對有N個終端、M個節點的系統,節點電壓可以通過以下公式計算得出(假設本側終端與第n個節點Jn相連)。
(10)
電流相量是由多個“0”和n行的本側節點電流構成。在這種情況下,在4個可用節點中,本地終端與第一個節點相連,所以節點J1的所有節點電壓可以這樣計算:
(11)
(6)然后,自相應節點流至遠方終端的節點電流可以根據本側節點電流計算得出。自第n個節點流至第k個終端的節點電流可以表示如下:
(12)
(7)接收端第k個遠方終端與本側之間的時間差可以通過式(9)計算得出
因此,可以采用與一個節點多個終端系統一樣的“同時間對準法”實現同步。
3 技術運用
該技術已經數學軟件模型驗證,可以直接編輯、轉換為C編碼,然后轉化為產品/繼電器。
3.1 總體方法
這種本側與從遠方終端接收到的電流/電壓之間時間差的總體計算方法見圖4。
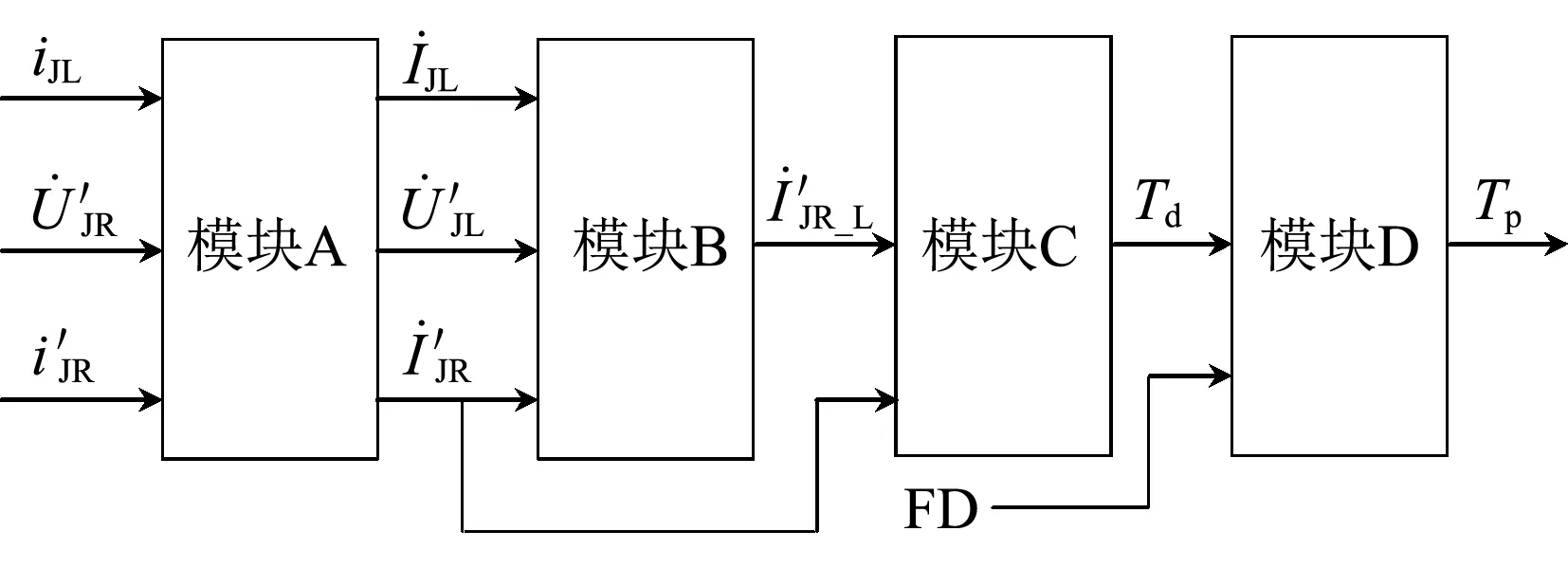
圖4 時間差計算的總體方法


模塊D包含了控制邏輯,設計用來處理各種運用方案下的自同步。例如,一旦探測到故障(FD是故障探測信號),就必須凍結時間差,就是說,輸出值保持為故障發生前的時間差值。
3.2 流至遠方終端節點電流的計算方法
利用本地節點電流計算流至遠方終端的節點電流的方法見圖5。
利用模塊E中的支路追加法構建初始阻抗矩陣ZM。終端支路不包含在此初始阻抗矩陣中。例如,在圖3所示的系統中,終端支路J1L, J1R1, J2R2, J3R3, J4R4, J4R5沒有包含在初始矩陣ZM中,它只包含由J1J2, J1J3, J2J3, J2J4 和 J3J4組成的系統。與相應遠方終端相連支線的等效阻抗zeqR在模塊F中同時計算出。與相應遠方終端相連支線的實時等效電阻被加入模塊G中的阻抗矩陣ZM,構成了包含所有遠方終端系統的阻抗矩陣ZMR。

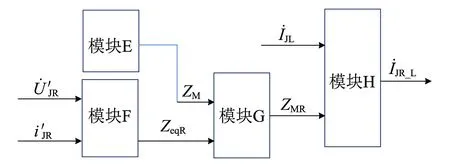
圖5 流至遠方終端的節點電流的計算方法
3.3 時間差計算
時間差是通過將在本側終端計算出的節點電流相量與從遠方終端傳來的電流相比較而計算得出的。例如,在圖3所示的系統各種,本側終端和遠方終端R1之間的時間差可以通過式(9)計算得出:
(13)
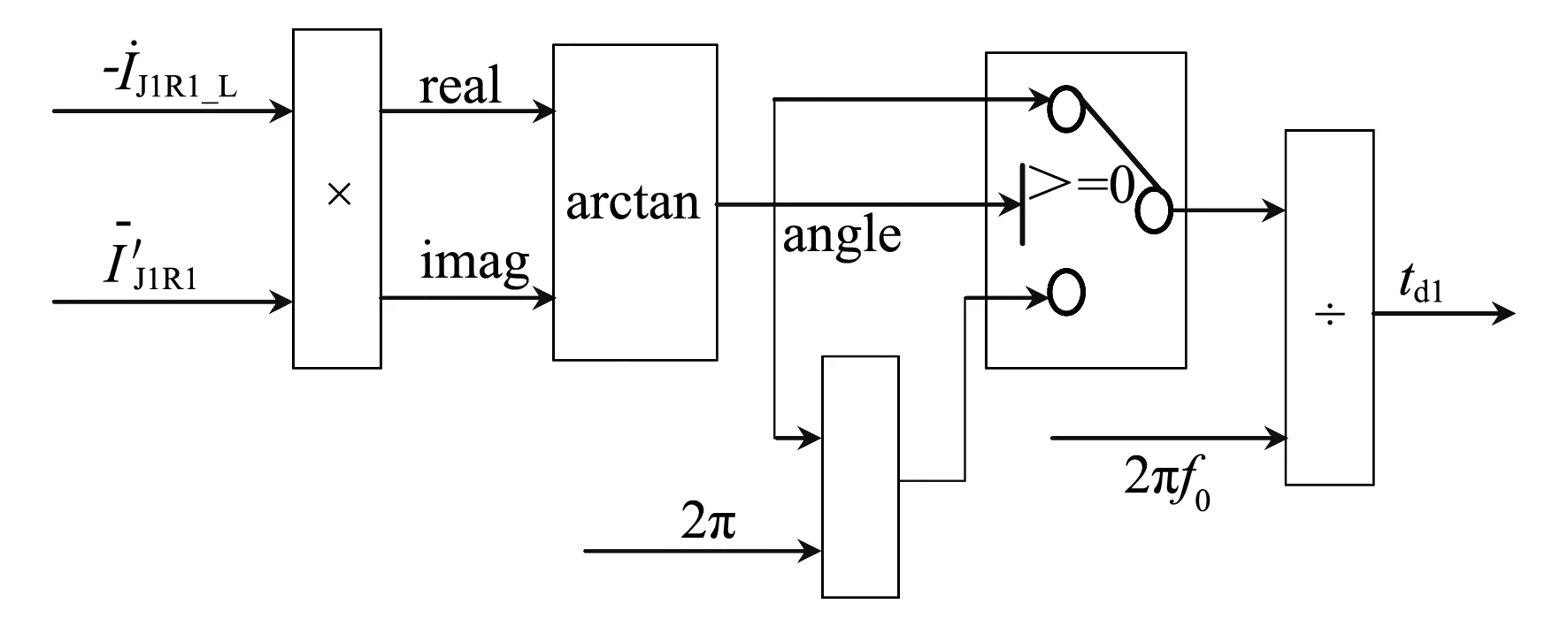
圖6 本側和其中一個遠方終端之間時間差的計算方法
3.4 不同應用方案的控制邏輯
考慮了多種應用方案,以確保自同步功能在多終端差動保護中精確、可靠動作。在此選取了其中最重要的三種方案作介紹。其他未作介紹的方案包括VT 監控、CT監控、通信故障、斷路器開閉初始狀態等等。
(1)多終端系統出現故障。發生故障時,自同步必須被鎖定,自同步輸出值保持故障前計算數值。
圖7說明了自同步鎖定邏輯。當監測到故障,發出FD信號,促使比測器模塊選擇上端通道,阻止tdOut更新。tdOut輸出值保持不變,直至FD信號消失。
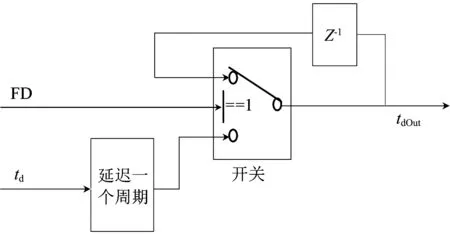
圖7 故障時自同步控制邏輯
(2)當本側和對側之間時間差超過了一個基礎頻率周期。對一個50 Hz的系統而言,相當于時間差超過了20 ms。用相量比較法計算出的時間差超過20 ms,這個值就會是一個錯誤值。例如,如果時間差是23 ms,在50 Hz系統中,自同步模塊就會給出一個3 ms的數值。采用了乒乓法擔當監控機制來解決這個問題。盡管乒乓法不能給出準確數值,但是卻可以給出本側和遠方終端之間時間差的平均值。此方案的解決辦法見圖8。

圖8 時間差超過20 ms時的解決辦法
在圖8中,tPP是用乒乓法計算出的時間延遲,t0是一個周期值,50 Hz系統中即是20 ms。50 Hz系統中假定乒乓法計算出的數值是19 ms,那么最后的結果應該是int[(19 ms-3 ms)/20 ms]*20 ms+3 ms=23 ms。
(3)用乒乓法檢測結果。根據乒乓法原理,乒乓法計算出來的時間差是從本側到遠方終端和從遠方終端到本側時間差之間的平均值,即:
2tPP=tp+tpR
(14)
式中tPP——乒乓法計算出的時間差;tp——由本側自同步模塊計算出的時間差;tpR——遠方終端自同步模塊計算、傳輸至本側的時間差。
圖9說明了乒乓法如何檢測控制。
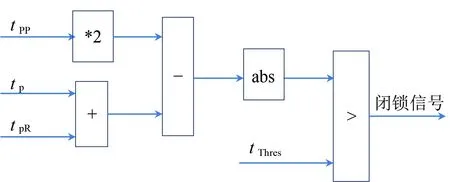
圖9 乒乓法的檢測控制
基本理念是如果abs(2tPP-tp-tpR)>tThres(tThres=2.5 ms,50 Hz系統中自同步最大允許誤差為單向1.25 ms,因此極限值為1.25 ms的兩倍),然后整個差動保護被閉鎖。
4 驗證和測試結果
采用電力系統真實數據,運用RTDS和PSCAD電力系統仿真模型生成的COMTRADE文件,完成了大量驗證測試。
為本文介紹的自同步技術方法所作的測試結果是基于一個典型的6終端、4節點400 kV、50 Hz輸電系統,如圖10所示。系統用PSCAD建模,為測試專門生成了COMTRADE文件。

圖10 典型的6終端、4節點400 kV輸電系統圖
本文中的驗證結果采用基本取樣比率2 400 Hz(即每個周期48個樣本)、運用分布參數模型來計算電容電流補償。因受繼電器內部消息幀帶寬的限制,自同步和多端差動保護的二次取樣比率是800 Hz(即每個周期16個采樣點)。各部分的線路參數是相同的,如表1所示。
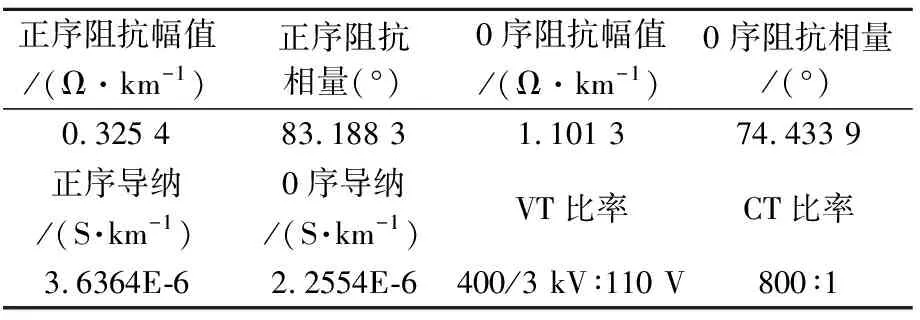
表1 圖10中的系統參數
4.1 本側和遠方終端之間的時間差
同步模塊計算出的時間差數值見表2。計算出的時間差特征見圖11。

表2 通過自同步計算出的時間差
從圖11可以看出,自同步在0.1 s時開始工作,這是系統在PSCAD處理需要花費的時間。1.0 s時,因故障探測器檢測到故障,輸出結果自保持。

圖11 時間差特征
4.2 基于自同步計算結果得出的差動電流和偏流
基于自同步計算結果,區內A相接地故障和區外3相故障的差動電流Idiff和偏流Ibias呈現特征分別見圖12和圖13。

圖12 內部A相接地故障(50ohm故障電阻)的差動電流Idiff和偏流Ibias

圖13 外部3相故障(50ohm故障電阻)的差動電流Idiff和偏流Ibias
4.3 基礎頻率周期的時間差
對50 Hz系統,將遠方終端和本側之間的時間差設置為超過20 ms。計算出的時間差值見表3。大量的驗證顯示最大誤差不超過0.08 ms。
5 結語
本文介紹了一種新的自同步方法來作為對GPS自同步技術的補充,適合多終端系統差動保護,可適用于多終端多節點輸電系統。它首先采用阻抗矩陣來計算節點電壓,然后根據遠端等效阻抗/導納分別計算流入遠方終端的節點電流,然后將計算出的遠端電流與接收到的遠方終端的電流相位差比較,最終計算出傳輸時間差。最后用時間差數據對終端電流時間校正,實施差動保護。這種技術已經被用于商業產品,大量的驗證顯示計算的時間差最大誤差小于0.08 ms,完全滿足差動保護的要求。

表3 接近或超過20 ms的時間差
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25