基于拋物線模型擬合的三波束比幅測角
2019-01-19 07:46:18李敬,張琛
艦船電子對抗 2018年6期
關(guān)鍵詞:拋物線
李 敬,張 琛
(中國船舶重工集團公司第七二三研究所, 江蘇 揚州 225101)
0 引 言
相控陣雷達是雷達信號處理技術(shù)、新型器件與計算機技術(shù)結(jié)合后發(fā)展到高階段的產(chǎn)物,是隨著電子計算機和微波移相技術(shù)的發(fā)展而誕生的。雷達探測的重要任務(wù)之一就是探測目標(biāo)位置,目標(biāo)測向是目標(biāo)位置參數(shù)估計中的重要研究內(nèi)容,因相控陣天線具有波束掃描的快速性、靈活性與波束形狀的捷變能力,其在波束形成上是多種多樣的,測向方法也不盡相同。相控陣雷達一般采用同時多波束進行目標(biāo)探測,為了測量目標(biāo)的精確方位,必須采用相應(yīng)的方法利用這些多波束進行方位估計。本文針對三波束同時接收的工作方式介紹一種高精度測角方法,即利用拋物線模型擬合實現(xiàn)三波束比幅測角。
1 天線方向圖
比幅法測角是利用天線收到的回波信號幅度值來做角度測量的,該幅度值的變化規(guī)律取決于天線方向圖以及天線收發(fā)方式。本文所介紹的工作方式是:發(fā)射一個寬波束,采用3個相同且彼此部分重疊的波束同時接收的方式[1],接收示意圖見圖1。

圖1 三波束接收示意圖
圖1中左、中、右3個波束同時接收目標(biāo)回波,Bw為半功率波束寬度,三波束彼此重疊的角度為Bw/2。圖2是1路發(fā)射波束3路接收波束的方向圖。圖中黑實線表示指向為法線方向(0°)的發(fā)射波束,虛線依次從左到右分別表示3 dB波束寬度為Bw的接收波束的左(波束1)、中(波束2)、右(波束3)三波束。
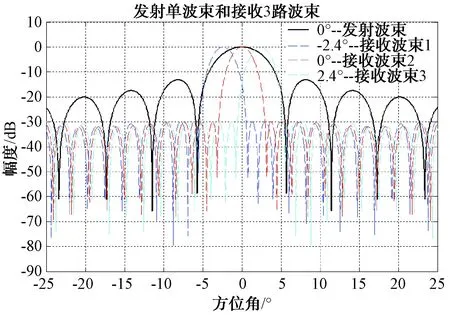
圖2 發(fā)射波束和3路接收波束方向圖
2 三波束比幅測角
三波束同時接收的目標(biāo)回波,在幅度上有一定的對應(yīng)關(guān)系,即目標(biāo)靠近哪個接收波束,哪個波束的回波幅度就大,且回波幅度最大的位置就是目標(biāo)所在位置,為此可以利用開口向下的拋物線函數(shù)y=ax2+c進行三波束目標(biāo)回波幅度的函數(shù)擬合,求出目標(biāo)所在的具體方位。如圖3所示,該拋物線以y軸為對稱軸,x軸表示中心波束指向偏離目標(biāo)的角度偏差,y軸表示回波幅度。
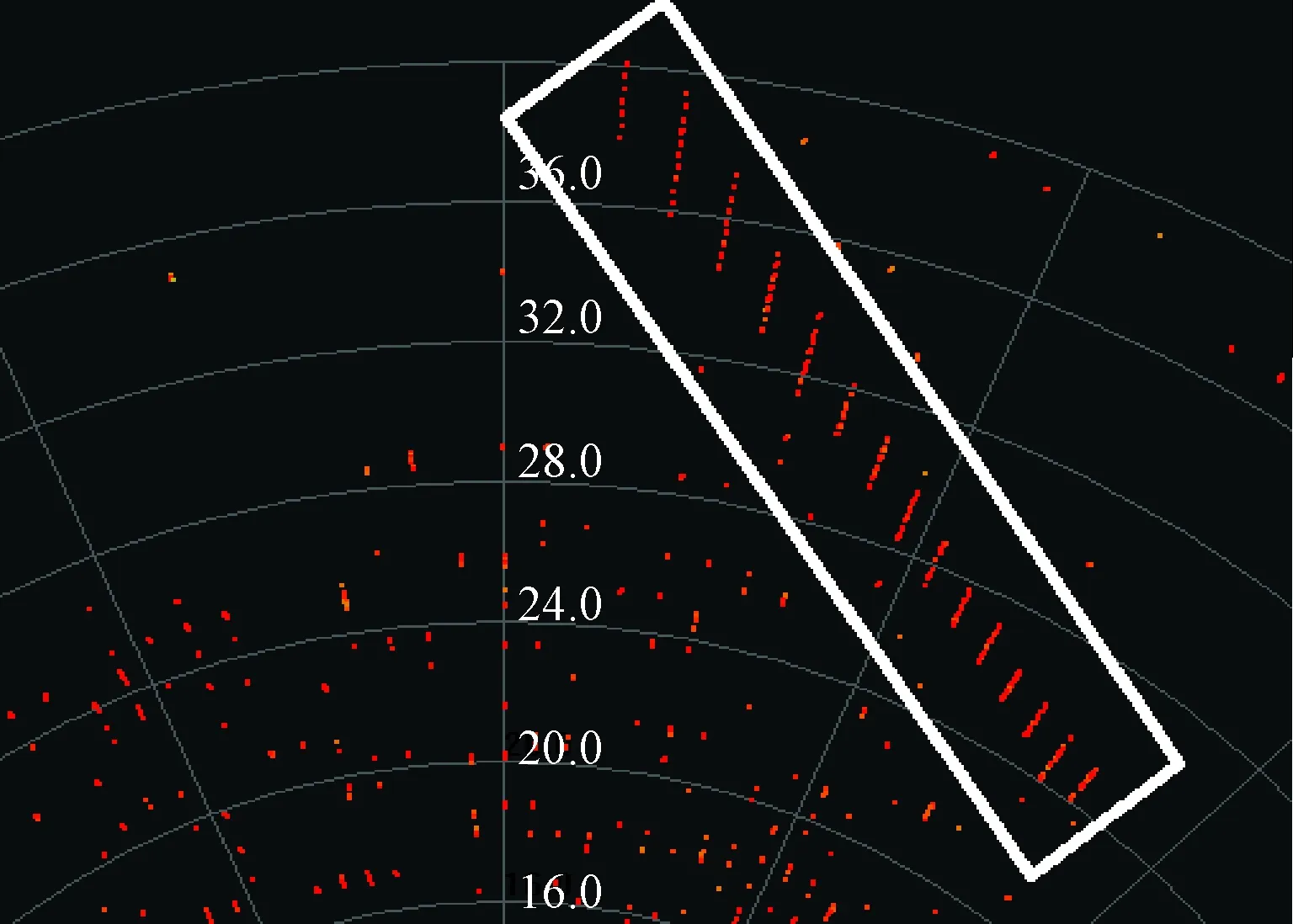
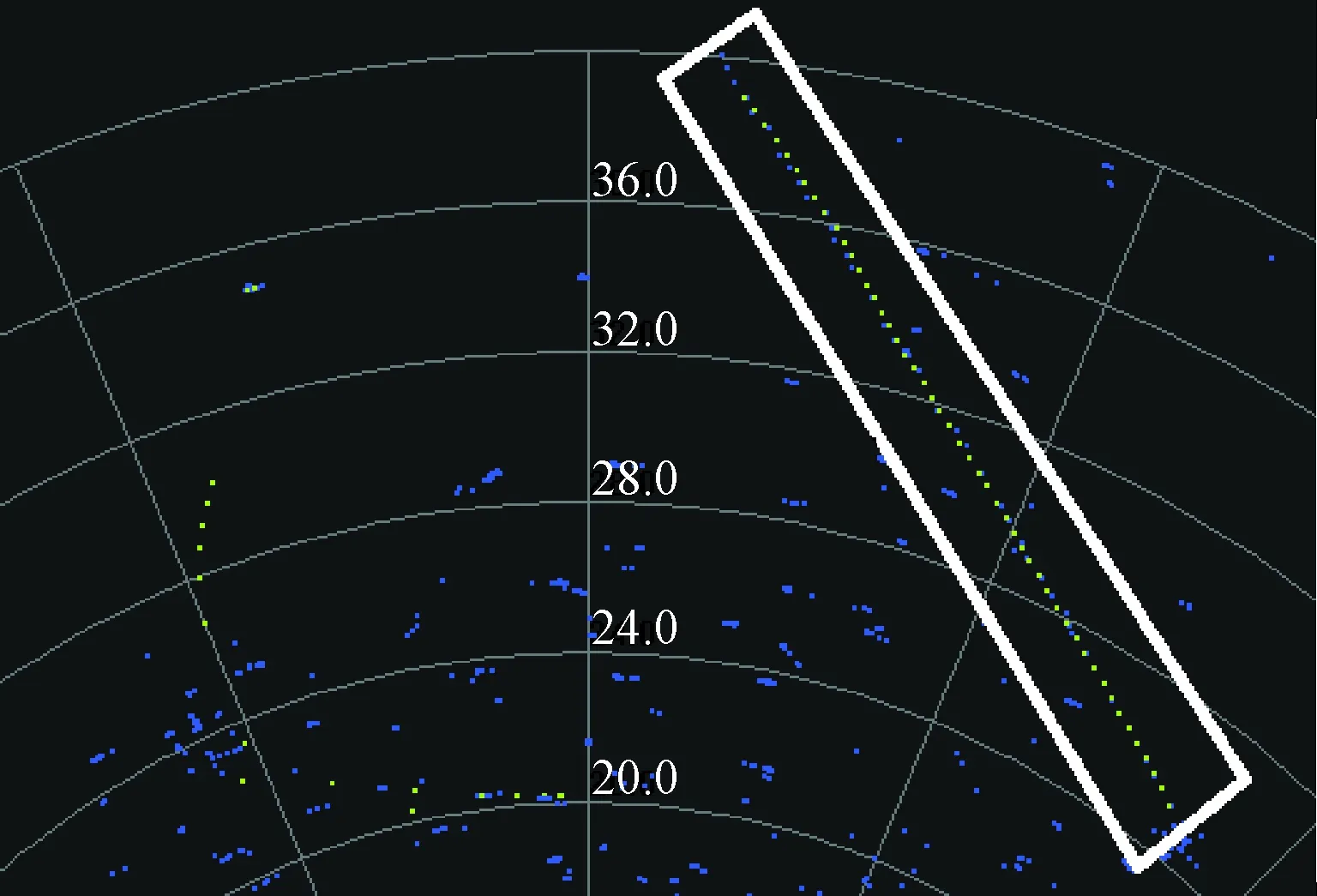
設(shè)左、中、右三波束測得的目標(biāo)參數(shù)為(xlyl)、(xcyc)和(xryr)。xl,xc和xr分別為左、中、右三波束的方位指向,yl,yc和yr分別為三波束測得的目標(biāo)回波幅度。如果目標(biāo)位于中心波束,不考慮副瓣影響,理論上左右兩波束幅度值相等,分別位于拋物線的兩邊。此時xc=0表示中心波束指向目標(biāo),目標(biāo)幅度最大值c=yc落在y軸上。當(dāng)目標(biāo)偏向左波束,位于中心波束和左波束之間時,回波幅度的最大值已不是中心波束上測得的回波幅度值了,則中心波束指向xc≠0。如圖3所示,xc代表了目標(biāo)偏離中心波束的角度偏差。此時目標(biāo)指向的回波幅度仍然是最大,仍然位于拋物線最高點,最大值仍然是c,即目標(biāo)最大幅度永遠位于y軸上。由此設(shè)目標(biāo)在拋物線上的參數(shù)為(xpyp),xp>0,yc 圖3 拋物線擬合實現(xiàn)三波束比幅測角 將左、中、右三波束測得的目標(biāo)參數(shù)(xlyl)、(xcyc)和(xryr)代入拋物線模型得: (1) 若三波束之間兩兩夾角為波束寬度的一半,即Bw/2,則有: (2) 將公式(2)代入公式(1)求得: (3) 從公式(3)可知yl,yc和yr分別為三波束測得的目標(biāo)回波幅度,為已知值,Bw為接收波束寬度,也是已知的,由此可求得擬合參數(shù)a和c,該拋物線就確定了。同時還可求得目標(biāo)角度修正值xc。相控陣雷達在工作的時候,波束指向是確定的,將波束指向用xc值修正后就可得出目標(biāo)的真方位和回波幅度。 拋物線模型擬合實現(xiàn)三波束比幅測角的驗證是通過在設(shè)備上測量民航機來驗證的,見圖4。圖4中的點是民航機在不同波位上的視頻回波,為了方便顯示,在每個波位上只繪出中心波束的回波視頻,框內(nèi)是民航機的回波視頻。通過采用拋物線模型擬合實現(xiàn)求每組波束目標(biāo)的位置后,再進行點跡凝聚和航跡處理,實現(xiàn)對目標(biāo)的穩(wěn)定跟蹤,與ADS-B數(shù)據(jù)對比,試驗測得方位跟蹤精度均方根小于0.3°。 圖4 民航機回波視頻 圖5是對回波數(shù)據(jù)進行比幅測角,求目標(biāo)方位和俯仰、視頻凝聚后的點跡數(shù)據(jù),框內(nèi)是民航機的點跡數(shù)據(jù)。從圖5可以看出,民航機在整個飛行過程是均勻飛行的。表1是對應(yīng)圖4框內(nèi)視頻回波的數(shù)值,圖4中顯示的是地理坐標(biāo)系下目標(biāo)的位置,表1中對應(yīng)的是陣面坐標(biāo)系下目標(biāo)的位置,陣面架設(shè)參數(shù)方位-45°,傾斜角20°,比幅測角數(shù)據(jù)最終要從陣面坐標(biāo)轉(zhuǎn)換到地理坐標(biāo)系下[2]。 圖5 民航機點跡與航跡 由于數(shù)據(jù)量比較大,只給出了3個掃描周期的視頻數(shù)據(jù)及對應(yīng)的參數(shù),每個粗框內(nèi)對應(yīng)著一個掃描周期的視頻回波,每個周期大約有3~4個波位的立體角內(nèi)可以探測到目標(biāo)。每個粗框內(nèi)的數(shù)據(jù)可以凝聚成圖5中的一個點。每個波位對應(yīng)大約2~3個距離單元,每個距離單元對應(yīng)目標(biāo)左、中、右(如圖1所示的)3個回波波束的幅度值,目標(biāo)幅度和方位分別是對左、中、右三波束進行拋物線擬合實現(xiàn)三波束比幅測角得到的目標(biāo)方位值和該方位對應(yīng)的目標(biāo)幅度值。 表1 民航機三波束視頻回波 文獻[3]中的映射內(nèi)插法雖然也采用拋物線模型,但是用了y=ax2+bx+c模型,而工程中已知的只有3個波束的幅值和波束間隔,在解算目標(biāo)方位時,少一個已知量,因此添加了一個約束條件α=-b/2a,這就導(dǎo)致函數(shù)的不靈活性,而本文巧妙地將目標(biāo)位置移至y軸上,這樣就變成了y=ax2+c模型,既滿足了已知參數(shù),又不加任何約束,可以根據(jù)已知參數(shù),擬合最佳拋物線系數(shù),對于多波束(大于3個接收波束)也可采用此方法。 利用拋物線擬合實現(xiàn)三波束比幅測向不需要進行繁瑣的定標(biāo),處理簡單,且由相控陣雷達原理知,隨著陣列掃描方位的變化,發(fā)射波束和接收波束會相應(yīng)展寬,即Bw隨著天線掃描角度變化而展寬,因此隨著角度變化拋物線形狀是變化的,該方法可以充分利用3對測量數(shù)據(jù)進行拋物線擬合求得a和c,從而求出目標(biāo)指向。同時該算法還可以求得目標(biāo)的幅度參數(shù),如果設(shè)備的穩(wěn)定性好,幅度參數(shù)作為后續(xù)數(shù)據(jù)處理會是一個很重要的參數(shù),可以為后續(xù)雜波圖積累和航跡關(guān)聯(lián)提供依據(jù)。 必須注意的是比幅測角要求同一時刻測得的目標(biāo)才能進行比幅,如果對某個運動目標(biāo)掃描時不連續(xù),是無法進行比幅測角的,目標(biāo)可能跨多個距離單元。
3 數(shù)據(jù)驗證與結(jié)論

4 結(jié)束語
猜你喜歡
中學(xué)生數(shù)理化·高二版(2025年2期)2025-03-05 00:00:00
語數(shù)外學(xué)習(xí)·高中版上旬(2024年18期)2024-02-20 00:00:00
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2022年1期)2022-04-26 13:59:58
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2022年1期)2022-04-26 13:59:56
中學(xué)生數(shù)理化·中考版(2021年10期)2021-11-22 07:26:38
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年3期)2021-06-09 06:08:40
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年2期)2021-03-19 08:54:12
中學(xué)生數(shù)理化·中考版(2019年10期)2019-11-25 09:39:04
中學(xué)生數(shù)理化·中考版(2018年10期)2018-12-07 00:44:42
中學(xué)生數(shù)理化·中考版(2017年10期)2017-04-23 06:29:38
