智能三維技術在抽水蓄能電站測量中的應用
2019-02-12 02:50:42董云濤李宗華陳雨生張曉朋
水電與抽水蓄能 2019年5期
董云濤,李 敏,李宗華,陳雨生,郭 巧,張曉朋
(1.保定易縣抽水蓄能有限公司,河北省保定市 074200;2.廣州南方測繪科技股份有限公司,廣東省廣州市 510000)
0 引言
隨著“智慧地球”[1]等理念的相繼提出,使得傳統的二維地理信息已經難以滿足現代信息化發展的需求。抽水蓄能電站的規劃、建設和運營急需從傳統上的二維技術提升到三維的高度[1]。在抽水蓄能電站前期的勘察與施工測量中,由于其山高坡峭,地形復雜,交通不便,甚至某些地方作業人員難以到達,傳統的人工測量方法作業困難,效率低,精度得不到保障,離散的二維數據不能直觀地反映實地地形,施工決策困難[2,3]。
隨著三維技術的發展,機載激光雷達測量和無人機傾斜攝影測量[4]等高新技術的興起,這些新技術越來越智能化、簡單化,精度也越來越高,在許多領域已經代替了傳統人工測量。因此,針對上述抽水蓄能水電站的建設困難與新需求,本文提出智能三維技術解決方案,并成功應用于某抽水蓄能電站測量項目。
1 智能三維技術方案
智能三維技術方案是利用無人機搭載激光掃描儀和相機,采集點云和影像,建立地面數字高程模型和三維實景模型,將點云、三維實景模型、數字高程模型等多源數據融合于三維可視化共享平臺中,實現三維數據共享,輔助決策抽水蓄能水電站的建設(見圖1)。
(1)采用高效的傾斜攝影和機載激光雷達新技術,對該抽水蓄能電站工程區進行原始地形測量,獲取工程區域高精度三維地形數據,建立電站三維模型,作為施工建設的原始數字化依據,涵蓋各處坐標點、高程等數據。
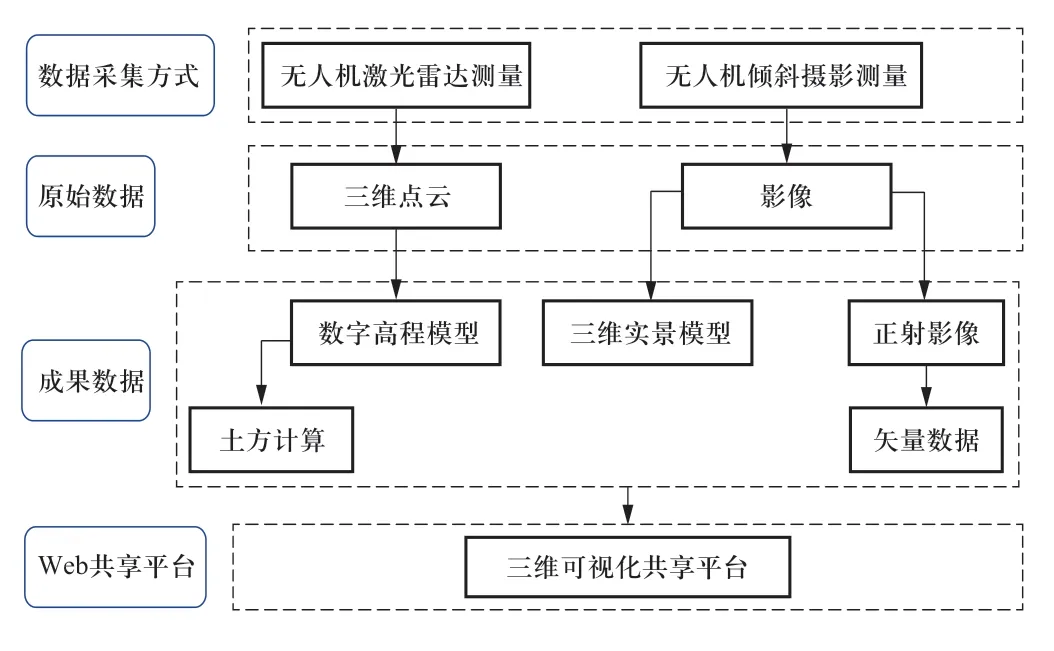
圖1 智能三維技術方案Figure1 Intelligent three-dimensional technology solution
(2)對工程區范圍內需要明挖和填筑的范圍,將工程區域的道路、建筑、水庫等三維測量數據與三維地形數據進行融合,計算土方,輸出工程量分析報告,作為工程施工土石方明挖工程量計量的參考。
(3)建立多源數據三維可視化共享平臺,通過Server端發布數據,Web端共享數據。實現模擬行人視角瀏覽三維數字化成果,以第一人稱視角查看公路、建筑附近的地形地勢,參考多源數據,確保施工輔助決策信息的可靠性。
2 關鍵技術
2.1 機載激光雷達技術
機載激光雷達技術(LiDAR)是一種激光掃描系統、全球定位系統(GPS)和慣性導航系統(INS)三種技術集成的三維數據采集技術,其作業效率高,精度高,能獲取真實地面信息,是獲取地球空間信息的高新技術之一[2]。機載激光雷達是一種主動式測量方式,不受光線影響,夜間也能作業;能穿透部分植被獲取高精度的地面三維信息,從而獲得山區真實數字地面模型;無需控制快速獲取地形數據;數據處理高度自動化[5]。對于山區作業困難地區,植被覆蓋較多情況,獲取地面三維數據機載激光雷達技術無疑是一種最佳方式[6]。
機載激光雷達是利用GPS系統實時采集的位置信息,INS測得飛行姿態,激光掃描系統獲取掃描頭到激光腳點之間的距離。GPS數據和INS數據,結合地面基站在航跡處理軟件例如Inertial Explorer中進行事后差分(DGPS),得到高精度的POS數據,通過點云解算軟件例如SZTPointProcess,聯合POS數據、激光數據和坐標轉換參數解算生成點云。
由于航線規劃,解算參數設置或者天氣等原因,生成的點云可能存在漏洞、高程分層和平面偏移等現象,需要通過點云處理軟件例如Terrasolid檢查點云質量,如有漏洞則需補飛;對于高程分層和平面偏移問題通過Terrasolid的Tmatch模塊校正,若誤差過大難以校正需重飛。確保相對精度符合要求情況下,再利用參考面來校正點云的絕對精度。
校正點云后的點云提交給內業人員處理。利用Terrasolid添加不同的算法對點云進行自動去噪濾波(low points,Isolated points等算法)、分類(ground,below surface,by height from ground算法)提取出地面點。通過半自動分類工具人工干預分類提取出精確的地面點。再基于地面點建立不規則三角網,生成數字高程模型DEM,等高線,提高程點數據和計算土方量。機載激光雷達技術原理和工作流程(見圖2、圖3)。
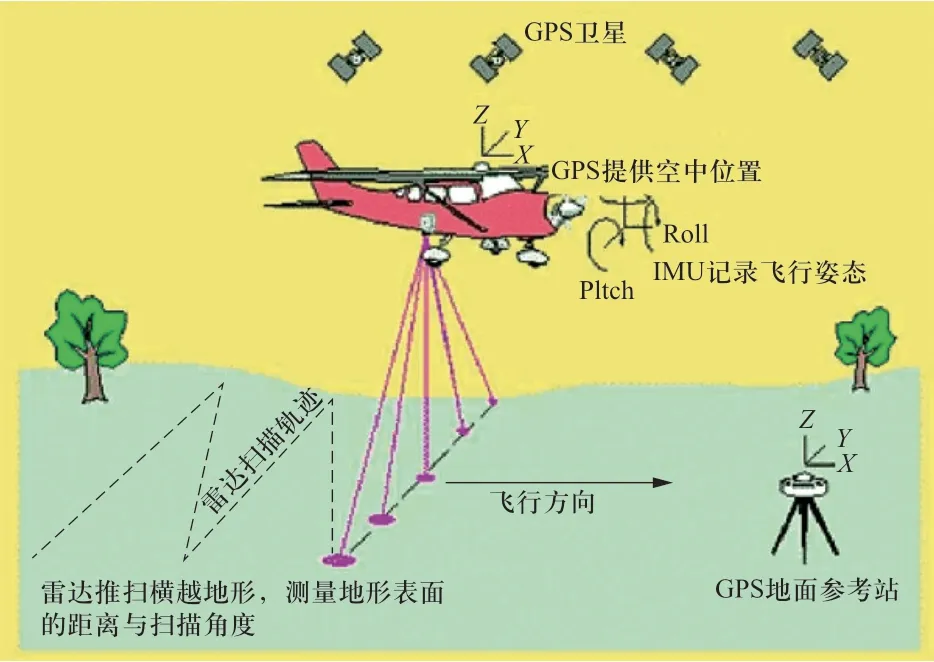
圖2 激光雷達作業原理Figure 2 Principle of Lidar Operation
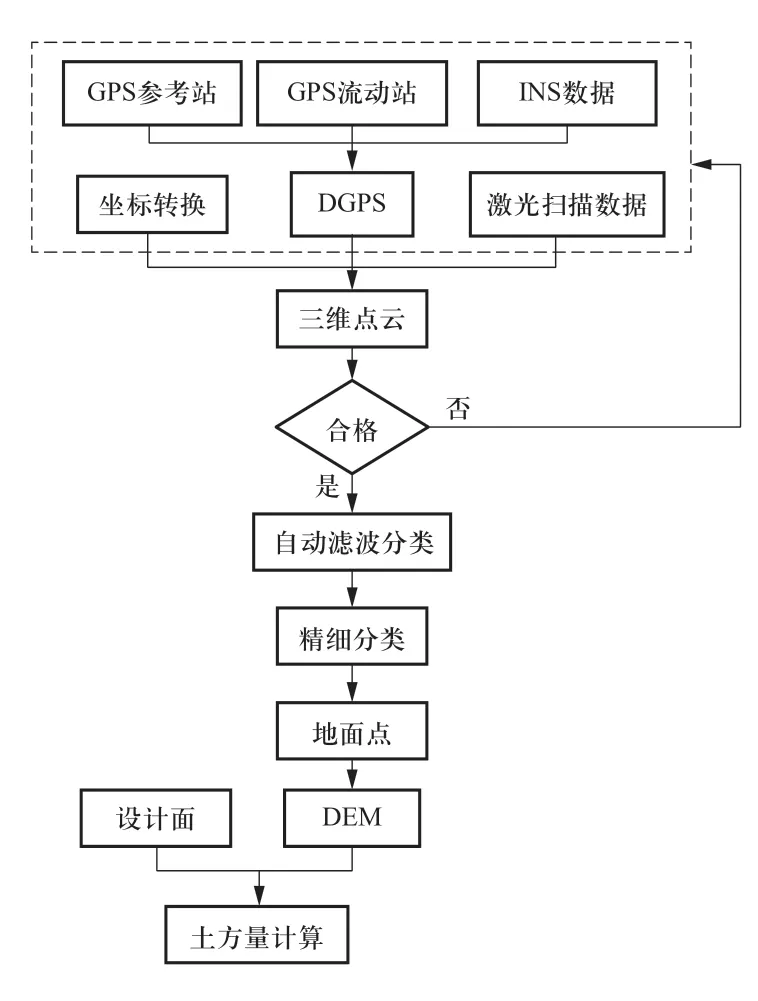
圖3 機載激光雷達工作流程Figure 3 Airborne Lidar Workflow
2.2 傾斜攝影與三維實景建模
無人機傾斜攝影測量技術[7]是通過全球導航衛星系統 (GNSS)實時獲取無人機位置 ,通過相機拍攝地物多角度的影像,為三維模型的建立提供更豐富、更真實的紋理信息和輪廓信息。三維模型成果的每一個像素都帶有三維坐標,可以在模型上直接獲取坐標、角度、坡度、面積、長度、寬度、高度等信息,直觀地反映真實狀況。無人機傾斜攝影測量技術是當今信息時代的重要產物,由于高效、精度較高,被廣泛應用在各種領域的測量工作中。
無人機傾斜攝影技術原理和工作流程(見圖4、圖5),通過無人機搭載相機獲取多角度的影像數據,結合GPS信息和地面像控點數據糾正影像,然后進行特征點匹配,提取出不同影像中相同位置的特征點,基于特征點進行自動空中三角測量,算出外方位元素和特征點坐標,再生成密集點云,構建不規則三角網(TIN),通過影像全自動紋理映射構建三維實景模型,也可以從密集點云中提取DEM生產正射影像[8-10]。常見的生產軟件有Capture context(CC)和Inpho。

圖4 傾斜攝影建模原理Figure 4 Principles of Oblique Photography Modeling
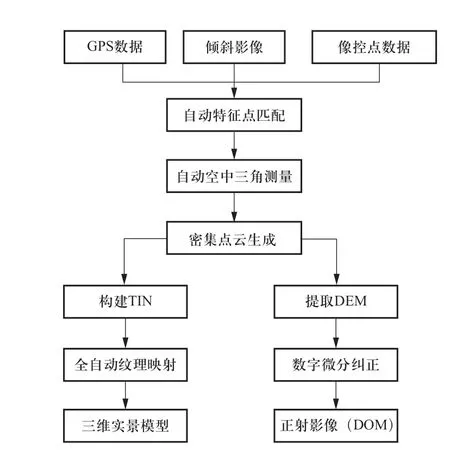
圖5 傾斜影像工作流程Figure 5 Oblique photogrammetry workflow
2.3 三維可視化共享平臺
三維可視化共享平臺架構(見圖6),包含數據處理PC端,Server管理端,共享Web端。其基于Java開發語言,采用跨平臺統一開發框架,集成二三維一體化技術,融合激光點云、傾斜攝影三維實景模型、BIM、數字高程模型、矢量等多源異構數據。解決了CAD設計成果與三維空間信息平臺無縫集成,實現了信息一體化集成表達和共享。
多源數據成果數據在PC端進行格式轉換,輕量化處理,然后導入Server服務端儲存,基于不同用戶和不同的需求,通過Server服務端設置不同的數據和權限,分享發布,直接打開分享鏈接在Web端瀏覽,分析和應用成果數據。基于三維可視化平臺Web端的多源數據切換瀏覽,自由視角瀏覽,設置軌跡飛行瀏覽,以第一人稱視角查看地形地勢,通過獲取任一點的三維坐標,測量距離、高度、表面積、角度等工具來確保施工輔助決策信息的可靠性。
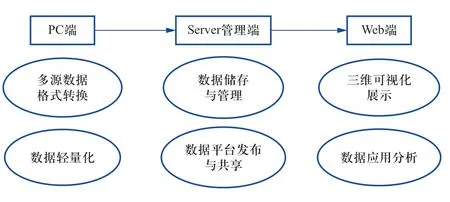
圖6 平臺架構Figure 6 Platform structure
3 實際工程應用
3.1 工程概況
該抽水蓄能電站測區有效范圍為4.07 km2,主要包括上水庫區域、下水庫區域、場內公路區域等。測量任務為采集項目范圍(見圖7)高精度地形數據和建立高精度三維實景模型。測區面積約7.6km2,最大高差約500m,地形復雜,高山陡峭,植被較多,交通不便。

圖 7 項目范圍Figure 7 Project region
3.2 數據采集與處理
3.2.1 數據采集
該項目利用大疆M600pro無人機搭載SZT-R250激光雷達設備見表1和自帶相機傳感器的大疆精靈4pro(見表2),并行作業,按預先設計的航線分別分區采集點云數據和影像數據。同時,在地面控制點上架設GNSS基站通過事后差分來減小無人機GPS定位誤差,保障GPS定位的準確性。
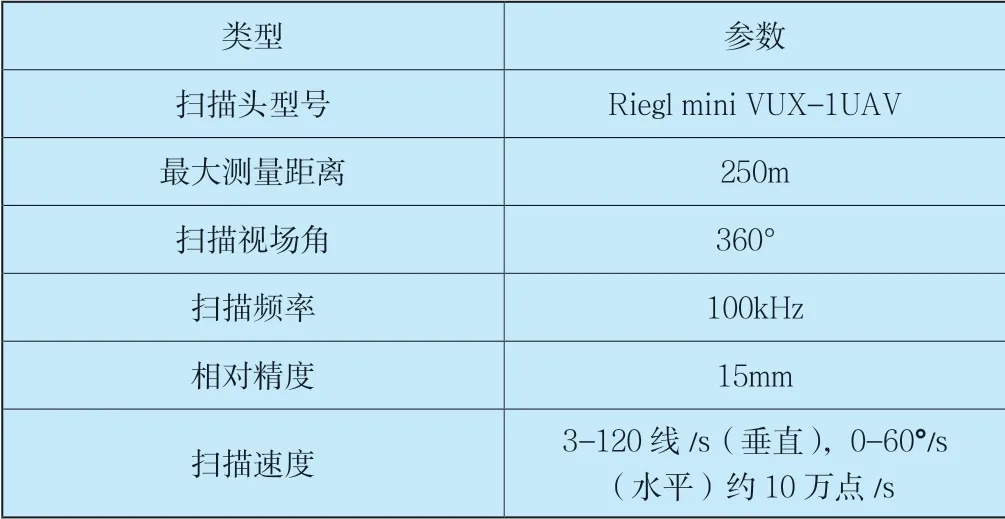
表1 SZT-R250掃描儀參數Table 1 SZT-R250 scanner parameters

表2 大疆精靈4 pro參數Table 2 DJ Phantom 4 pro parameters
3.2.2 數據處理
(1)點云數據處理。
外業采集的原始數據通過點云解算軟件得到點云。檢查漏洞、點密度、高程分層、平面偏移等問題。校正點云后,利用Terrasolid的Tscan模塊設置不同的算法對點云進行自動去噪濾波、分類,提取出地面點[見圖8(a)]。針對該項目的地形復雜,高差較大的情況,采用分區處理方法。將點云分為地勢較高區域和地勢平坦區域,分別利用不同的參數算法處理,小部分區域分類效果不佳需要通過半自動分類工具人工干預分類提取出精確的地面點。再基于地面點建立不規則三角網,生成數字高程模型DEM[見圖8(b)]。
(2)影像處理。
在三維實景建模ContextCapture軟件中導入外業采集的影像和POS數據,設置相機參數,利用像控點糾正影像位置,然后進行影像匹配、像點量測、空三加密、多視影像密集匹配、三角網的構建及紋模型自動理映射等全自動處理,最終輸出三維實景模型[見圖9(a)]和正射影像DOM[見圖9(b)]。
3.3 精度檢查與分析
采用RTK銀河1 plus在測區內重點區域采集100個作為點云的檢查點,將檢查點導入Terrasolid中通過點云內插出高程與檢查點高程進行比較,點云高程精度統計(見表3)。

圖8 點云成果Figure 8 Point cloud data product

圖9 傾斜攝影成果Figure 9 Oblique photography product

表3 點云高程精度統計Table 3 Elevation accuracy statistics of point clouds

表4 三維實景模型精度統計Table 4 Accuracy statistics of 3D scene models
由上表可知點云高程最大誤差為13.4cm,平均誤差波動幅度7.1cm,高程中誤差為7.9cm優于15cm,滿足1:500點云精度要求的最高標準。
采用RTK聯測測區附近控制點后直接測量檢測點坐標。按測區范圍有效工作區,沿主要硬化道路和建筑物明顯地物點均勻實地選取。采集43個檢查點與三維模型相對應的地物點進行坐標檢查。模型精度統計(見表4)。
表4可以看出三維模型的平面誤差都集中在0~10cm內,整體平面精度為4.7cm;高程方面大部分誤差在0~10cm內,少部分誤差在10~20cm內,極個別的山區模型誤差超過20cm,整體高程精度為7.7cm。整體的平面精度滿足1:500三維模型精度要求。
3.4 成果共享
數字高程模型、數字正射影像、三維實景模型、點云以及矢量等項目成果數據經過處理后儲入Server服務器中,分享Web端鏈接。在三維可視化平臺Web端(見圖10)中通過切換多源數據和瀏覽方式例如以第一人稱視角(見圖11)查看地形。利用分析工具輔助判斷和決策。
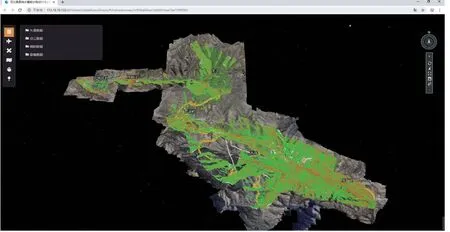
圖 10 三維可視化平臺Web端Figure10 Web terminal of 3D visualization platform
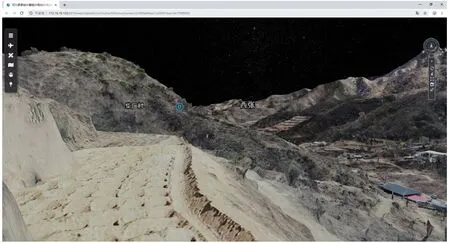
圖 11 第一人稱視角Figure 11 The view of first person
4 結束語
智能三維技術方案融合了多種先進技術,在該抽水蓄能項目應用中充分體現了智能化生產的高效優勢。在保證精度的情況下,克服了傳統測量的困難,數據從二維提升到了三維,使得數據應用更加廣泛,輔助施工建設的決策更加明確。尤其在地形復雜,植被較多,人員無法到達的區域有著明顯的優勢。其應用價值得到了充分的驗證,在后續新建抽水蓄能電站中具有借鑒意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03