空中弱小目標檢測跟蹤測試基準
2019-02-13 08:23:40回丙偉宋志勇范紅旗
航空兵器 2019年6期
關鍵詞:檢測
回丙偉,宋志勇,王 琦,范紅旗
(國防科技大學 電子科學學院 ATR重點實驗室,長沙 410073)
0 引 言
近年來,各類輕巧型商業化無人機的蓬勃發展,為世界各國的空域安全帶來了前所未有的威脅,無序飛行、缺乏管控的“低慢小”目標正日益成為防空目標識別面臨的主要挑戰。為應對潛在威脅、防范恐怖襲擊和維護安全環境,國內外工業界和學術界均投入了大量資源和人力開展了廣泛而深入的實驗和研究,在許多方面取得了令人滿意的成果。但“低慢小”防空探測作為一項開放式、對抗性、體系化的任務,在實際應用中仍然存在諸多難題亟待解決。本文旨在促進防空目標識別算法研究的廣泛參與,集合全社會的智力資源解決當前重難點問題,針對雷達和紅外成像兩種典型的探測手段[1-2],基于前期本領域對空探測試驗中積累的部分基礎數據,推出了面向“空中弱小目標檢測跟蹤”測試基準,供相關領域科研人員開展算法研究和性能評測。同時,本文提供的測試基準已作為第二屆“空天杯”創新創意大賽——探測識別算法挑戰賽的賽題使用,收集到了全國高校及科研單位的數十份算法方案及其測試案例,本文將擇優作為測試數據的基準算法,分別針對雷達和紅外兩個方向,從場景設計、指標體系和測試案例三個方面對本測試基準進行簡要說明。
1 場景設計
雷達和紅外成像數據均為地面背景下空中固定翼無人機目標的探測數據。由安裝于二軸(方位軸和俯仰軸)轉臺上的試驗雷達和中波紅外相機分別獲取得到。
試驗雷達工作模式為寬帶距離-多普勒模式,輸入數據為脈沖壓縮后的時域脈沖序列,迎面飛行多普勒為正,反之為負。雷達的載頻為35 GHz,脈沖重復頻率32 kHz。對于快時間維(每個脈沖),距離采樣單元的間隔為1.875 m,距離波門長度固定(含319采樣點),波門起始位置(對應第1個采樣點)隨目標移動,更新率為1 ms(32個脈沖更新一次),波門對應距離值的單位為m。
紅外相機為制冷型中波紅外相機,探測器波譜響應范圍為3~5 μm,成像分辨率為256×256 pixels,相機拍攝頻率為100 Hz,鏡頭視場角為3.0°×3.0°。
數據采集的配試目標為燃油動力固定翼無人機,其飛行速度約為30 km/h。目標無人機上裝有GPS,目標航跡為事先設定程序,并在GPS的引導下自主飛行,同時無人機通過無線通信手段實時將自身的無人機位置坐標傳回轉臺控制計算機,經測算后再引導二軸轉臺對無人機目標進行跟蹤,以維持目標位于探測器的視場內。
采集過程中目標所處背景包括天空和地面兩類,其中地面背景中包括村莊、農田、果園、建筑物、道路網、地面車輛以及人造生產生活設施等,目標環境特性較為復雜。在雷達數據中表現為雜波強度大,目標信雜比低;存在目標穿越主雜波的情況;同時存在大目標和小目標,且二者信噪比動態差異很大;目標運動復雜,存在機動情況;目標進出波束,存在目標數目變化情況[3]。紅外成像數據中目標表現為弱小點目標,背景中存在輻射強度大于目標的紅外輻射源;不同場景下目標的輻射強度存在較大差別[4]。
2 指標體系
本文為雷達和紅外圖像數據的算法測試結果評價定義了統一的指標體系和評分規則。根據算法運行結果計算算法性能得分。測試最終得分由檢測跟蹤得分和航跡連續性得分兩部分累計得到。為區分檢測跟蹤精度,在測試評價中給出擴展框的定義,即以數據標注坐標為中心的擴展區域,(兩類傳感器數據及對應標注數據的下載地址參見參考文獻[5]和[6]。)并根據擴展區域寬度的不同定義了W1和W2兩個層級的擴展框。對檢測跟蹤的得分均通過擴展框W1和W2來定義。具體操作中由于雷達和紅外光電數據探測體制的不同,其擴展框的描述方式分別根據其各自數據的物理含義來確定,如表1所示。
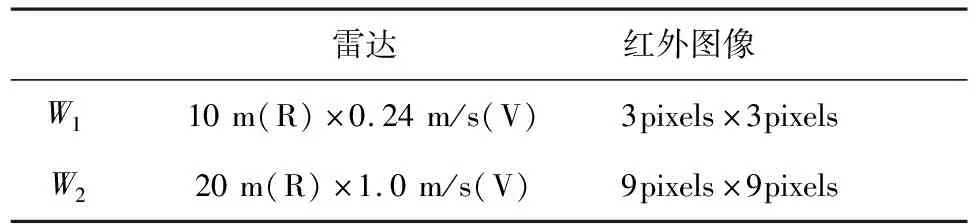
表1 雷達和紅外圖像數據的擴展框W1和W2定義
在上述擴展框定義的基礎上,進而制定計分規則。
2.1 檢測跟蹤得分
(1)正確檢測且精度滿足預定要求,即有且僅有1個檢測結果位于擴展框W1內(含),每個坐標位置得1分;
(2)正確檢測但精度不滿足預定要求,即有且僅有1個檢測結果位于擴展框W1外但位于擴展框W2內(含),每個坐標位置得0分;
(3)漏檢,即擴展框W2內(含)無檢測結果,每個坐標位置減1分;
(4)虛警,即在擴展框W2外出現檢測結果,或1個標注框內出現多余1個的檢測結果,每個坐標位置減2分。
2.2 航跡連續性得分
在正確檢測且滿足預定精度的前提下,即在條目(1)情形下,每段數據的航跡連續性得分為:同一目標數量最多的航跡編號數目×1分。
3 測試案例
本測試基準經過了20余組“空天杯”參賽算法的反復測試。現將優秀測試算法總結如下。
3.1 雷達數據測試
對于給定場景下的雷達數據,測試算法分別提出和采用了MTI雜波對消抑制、Radon-Fourier變換、自適應匹配濾波器、Keystone變換、Dechirping補償、相參-非相參聯合積累、Ⅱ-CFAR、交互多模卡爾曼濾波、標簽多伯努利平滑濾波、動態規劃TBD、多網格/曲線解模糊、滑窗航跡匹配關聯等技術。
目前本測試基準下針對雷達數據[5](第1至6段數據)的測試算法最高得分為1 165分,該方法提出了一套完整的脈沖多普勒(PD)雷達弱小目標高精度檢測跟蹤方案,具體包括:信號模型的建立、檢測聚焦和多目標跟蹤三個環節。在檢測聚焦階段,先利用高階FIR濾波器濾除低頻雜波,再使用Chirp-Z Transform(CZT)加速的Radon-Fourier變換(RFT)和自適應匹配濾波器(AMF)實現目標能量的融合聚焦,最后利用單元平均恒虛警率檢測器(CA-CFAR)實現目標的檢測;在多目標跟蹤階段,先進行點跡凝聚和幀間加速度估計的預處理,再利用標記多伯努利(LMB)平滑算法實現多目標跟蹤,最后在有效軌跡提取后輸出目標的最終軌跡。RFT和AMF融合聚焦方法可以有效實現信號中強目標和弱小目標的聚焦,提高了弱小目標檢測前的信噪比,從而極大地提高了CFAR檢測器對弱小目標的檢測概率。LMB平滑器可以輸出目標平滑后的軌跡,提高了距離和速度估計的精度。軌跡連續性判斷和有效軌跡提取,可以有效克服速度抖動和速度模糊引起的軌跡斷裂和虛假軌跡的問題。算法對測試數據處理的有效得分率達96.67%。算法流程圖如圖1所示,部分數據的檢測跟蹤結果如圖2所示。
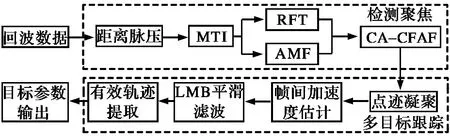
圖1 算法方案流程圖(雷達數據)
Fig.1 Flow chart of algorithm scheme(for radar data)
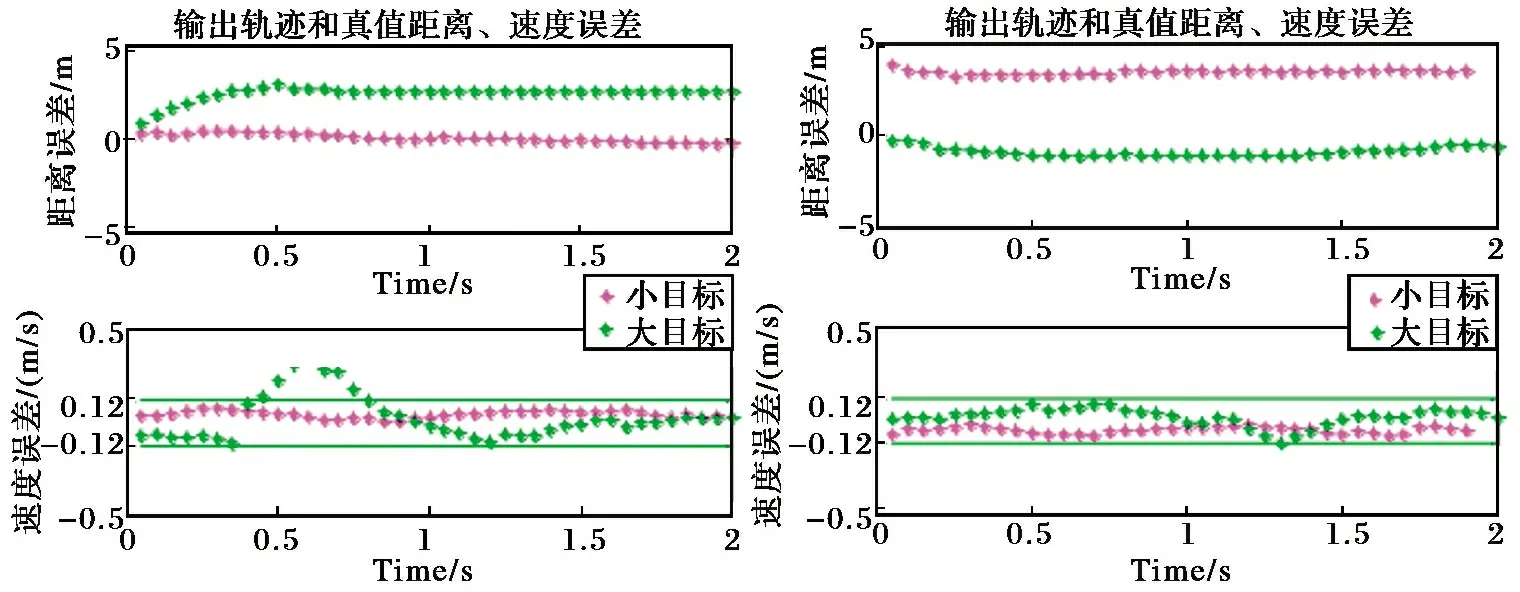
圖2 部分數據的目標檢測跟蹤結果
Fig.2 Target detection and track results of partial radar data
3.2 紅外數據測試
對于紅外圖像數據的弱小目標檢測跟蹤的測試算法可分為三類:基于深度學習的方法、基于傳統圖像分析的方法和混合方法。目前本測試基準下針對紅外成像數據[6](第1至11段數據)的測試算法最高得分為13 434分,該方法采用了基于幀差法的紅外目標檢測方法,并面向目標長時間靜止和目標-背景灰度對比度下降的情況分別提出了應對措施。針對目標長時間靜止的問題,方案通過執行跳幀的多幀差法,重新捕獲目標的運動信息。針對目標-背景灰度對比度下降的問題,方案提出了基于雙閾值幀差法的目標檢測方法。實驗表明,雙閾值幀差法可以極大地提高目標軌跡的連續性。針對天空背景下的紅外目標,方案提出了使用推廣結構張量(GST)算法做背景抑制,并配合迭代閾值分割法的紅外目標檢測方法。GST算法對目標的形狀做了約束,因此可有效抑制背景雜波。將迭代閾值分割法應用在GST提取到的顯著區域內,可以實現對紅外目標的有效檢測。結果表明,GST對背景抑制作用好。算法流程圖如圖3所示,部分數據的檢測跟蹤結果如圖4所示。
4 結 束 語
本測試基準針對“低慢小”防空目標識別這一主題設計制備了一套涵蓋雷達和紅外成像兩種探測手段的公開測試數據和性能評測規則,并在“空天杯”全國創新創意大賽探測識別算法挑戰賽中得到應用。實踐證明,本測試基準能夠通過分類加權計分的方式實現對目標檢測跟蹤算法情形的完整覆蓋,并對不同算法檢測跟蹤結果進行評測和定量考核,評價規則具有良好的可區分性和應用合理性。

圖3 算法方案流程圖(紅外數據)
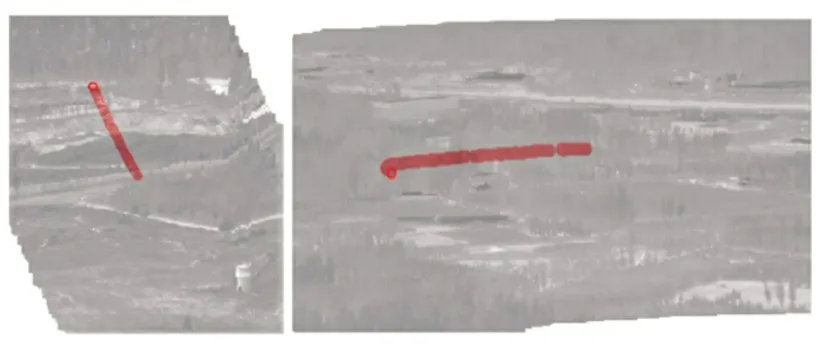
圖4 部分數據的目標運動軌跡圖
Fig.4 Target detection and track results of partial infrared data
接下來,我們將進一步增強數據集的完備性,重點貼近應用需求,完善多目標情形下的數據加工和評價準則制定。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48