攔截大氣層內(nèi)機動目標(biāo)的自適應(yīng)積分滑模制導(dǎo)律
2019-02-15 08:47:42黃景帥張洪波湯國建包為民
宇航學(xué)報 2019年1期
關(guān)鍵詞:設(shè)計
黃景帥,張洪波,湯國建,包為民, 2
(1. 國防科技大學(xué)空天科學(xué)學(xué)院,長沙 410073;2. 中國航天科技集團有限公司,北京 100048)
0 引 言
攔截末制導(dǎo)律的研究起始于20世紀(jì)30-40年代,早期的制導(dǎo)律以比例導(dǎo)引(Proportional navigation, PN)為主[1-2]。由于其結(jié)構(gòu)簡單、易于實現(xiàn),因而成為工程應(yīng)用最廣泛的制導(dǎo)律。針對非機動或弱機動目標(biāo),PN能夠取得優(yōu)異的制導(dǎo)性能。但隨著目標(biāo)機動能力的提升,為了規(guī)避攔截系統(tǒng)通常會在攔截末段實施大幅度機動,PN由于未對目標(biāo)機動進(jìn)行專門處理導(dǎo)致其難以抑制由目標(biāo)機動引起的彈目視線旋轉(zhuǎn),進(jìn)而制導(dǎo)性能下降。由此,直接補償目標(biāo)加速度的增廣PN應(yīng)運而生,但其需要目標(biāo)的加速度信息,通常難以精確獲得[2]。為了有效攔截大機動目標(biāo),學(xué)者們基于先進(jìn)控制理論設(shè)計了諸多制導(dǎo)律,期望產(chǎn)生優(yōu)于PN的制導(dǎo)性能。
滑模變結(jié)構(gòu)控制對模型不確定性和外部干擾具有較強的魯棒性,因此廣泛應(yīng)用于末制導(dǎo)律的研究。Zhou等[3]采用基于趨近律的滑模控制設(shè)計了一種魯棒的自適應(yīng)滑模制導(dǎo)律,有效抑制了視線的旋轉(zhuǎn),終端脫靶量顯著低于PN。文獻(xiàn)[4]提出了一種含有廣義的函數(shù)項的滑模變結(jié)構(gòu)制導(dǎo)律,獲得了對目標(biāo)機動的魯棒性,具有更小的過載峰值和攔截時間。由于末制導(dǎo)時間短,視線旋轉(zhuǎn)角速率的收斂特性是影響制導(dǎo)性能的主要因素,但上述制導(dǎo)律僅保證了制導(dǎo)系統(tǒng)的穩(wěn)定性,并沒有涉及其收斂特性。基于有限時間穩(wěn)定理論,文獻(xiàn)[5-7]實現(xiàn)了視線旋轉(zhuǎn)角速率在有限時間范圍內(nèi)收斂至零或其鄰域。在上述魯棒制導(dǎo)律的設(shè)計過程中,為了獲得絕對的魯棒性,需要引入以目標(biāo)機動的上界為增益的切換項來消除未知的目標(biāo)機動干擾[3-7]。但是,切換項中的符號函數(shù)是非連續(xù)的,易引起制導(dǎo)指令的抖振,降低抖振最簡單的方法是用連續(xù)函數(shù)近似替代符號函數(shù),例如飽和型函數(shù)、Sigmoid型函數(shù)[3-8]。除抖振外,目標(biāo)機動的上界通常也難以確定,偏大會惡化抖振,偏小會缺乏魯棒性。
為了較好地對付目標(biāo)機動,控制視線轉(zhuǎn)率有限時間收斂,同時降低抖振,文獻(xiàn)[9]利用非線性干擾觀測器對目標(biāo)加速度進(jìn)行估計,并補償?shù)接邢迺r間收斂制導(dǎo)律中,精確攔截機動目標(biāo)的同時又有效降低了抖振。與文獻(xiàn)[9]類似,文獻(xiàn)[10]設(shè)計了一種有限時間收斂的制導(dǎo)律,并聯(lián)合擴張狀態(tài)觀測器對目標(biāo)加速度進(jìn)行估計。雖然實際仿真中上述觀測器的收斂速度較快,但由于無法避免估計誤差,且誤差受系統(tǒng)初始狀態(tài)的影響,因此難以定量給出誤差的上界,進(jìn)而系統(tǒng)的穩(wěn)定性和視線轉(zhuǎn)率的有限時間收斂性難以嚴(yán)格證明。文獻(xiàn)[11]基于有限時間干擾觀測器和新型的自適應(yīng)趨近律設(shè)計了一種有限時間制導(dǎo)律,不需要觀測誤差的上界。與利用觀測器補償目標(biāo)機動不同,在魯棒的滑模控制的基礎(chǔ)上,文獻(xiàn)[12-14]將加速度視作上界未知的外界干擾,采用自適應(yīng)估計算法對其上界進(jìn)行逼近,并證明了飽和函數(shù)替代符號函數(shù)后制導(dǎo)系統(tǒng)的漸進(jìn)穩(wěn)定性,消除了抖振。文獻(xiàn)[15]利用自適應(yīng)控制方法估計干擾上界平方的同時,設(shè)計了一種固有光滑的有限時間制導(dǎo)律,證明了制導(dǎo)系統(tǒng)的各狀態(tài)在有限時間內(nèi)收斂至零的鄰域。抑制制導(dǎo)指令的抖振與控制視線轉(zhuǎn)率的有限時間收斂是魯棒制導(dǎo)律的兩個重要的制導(dǎo)品質(zhì),從以上分析可知,抖振問題已能夠得到很好地解決甚至消除。但是,視線轉(zhuǎn)率有限收斂的時間尚難以靈活精確地控制,收斂時間過長會超出末制導(dǎo)的飛行時間,快速地收斂通常意味著更多的控制消耗,而且有時是不必要的。
鑒于機動目標(biāo)多數(shù)在大氣層內(nèi)飛行或?qū)嵤C動,例如高超聲速飛行器、機動彈頭和戰(zhàn)斗機等,于是本文針對大氣層內(nèi)機動目標(biāo)的攔截問題,在上述研究成果的基礎(chǔ)上,為了更靈活精確地控制視線轉(zhuǎn)率有限收斂的時間,同時兼顧控制消耗,設(shè)計了視線轉(zhuǎn)率收斂速率可調(diào)整的標(biāo)準(zhǔn)剖面,采用積分滑模控制方法跟蹤標(biāo)準(zhǔn)剖面,同時結(jié)合自適應(yīng)控制方法估計目標(biāo)機動干擾上界的平方,最終推導(dǎo)得到了自適應(yīng)的積分滑模制導(dǎo)律,并證明了積分滑模變量、跟蹤誤差與其積分均可在有限時間內(nèi)收斂至零的鄰域。為了適用于大氣層內(nèi)攔截,對所設(shè)計的制導(dǎo)律進(jìn)行了微分幾何形式的轉(zhuǎn)換,使其作用方向垂直于導(dǎo)彈速度。通過仿真,驗證了制導(dǎo)律的有效性。
1 導(dǎo)彈-目標(biāo)空間攔截模型
為了研究導(dǎo)彈與目標(biāo)間的相對運動,將兩者均看作質(zhì)點,則導(dǎo)彈末段攔截目標(biāo)的空間交戰(zhàn)場景可由圖1表示。圖中,oIxIyIzI為慣性坐標(biāo)系,M和T分別代表導(dǎo)彈和目標(biāo),由M指向T的矢量r為彈目視線(Line of sight, LOS)方向,vm和vt分別表示導(dǎo)彈和目標(biāo)的速度。
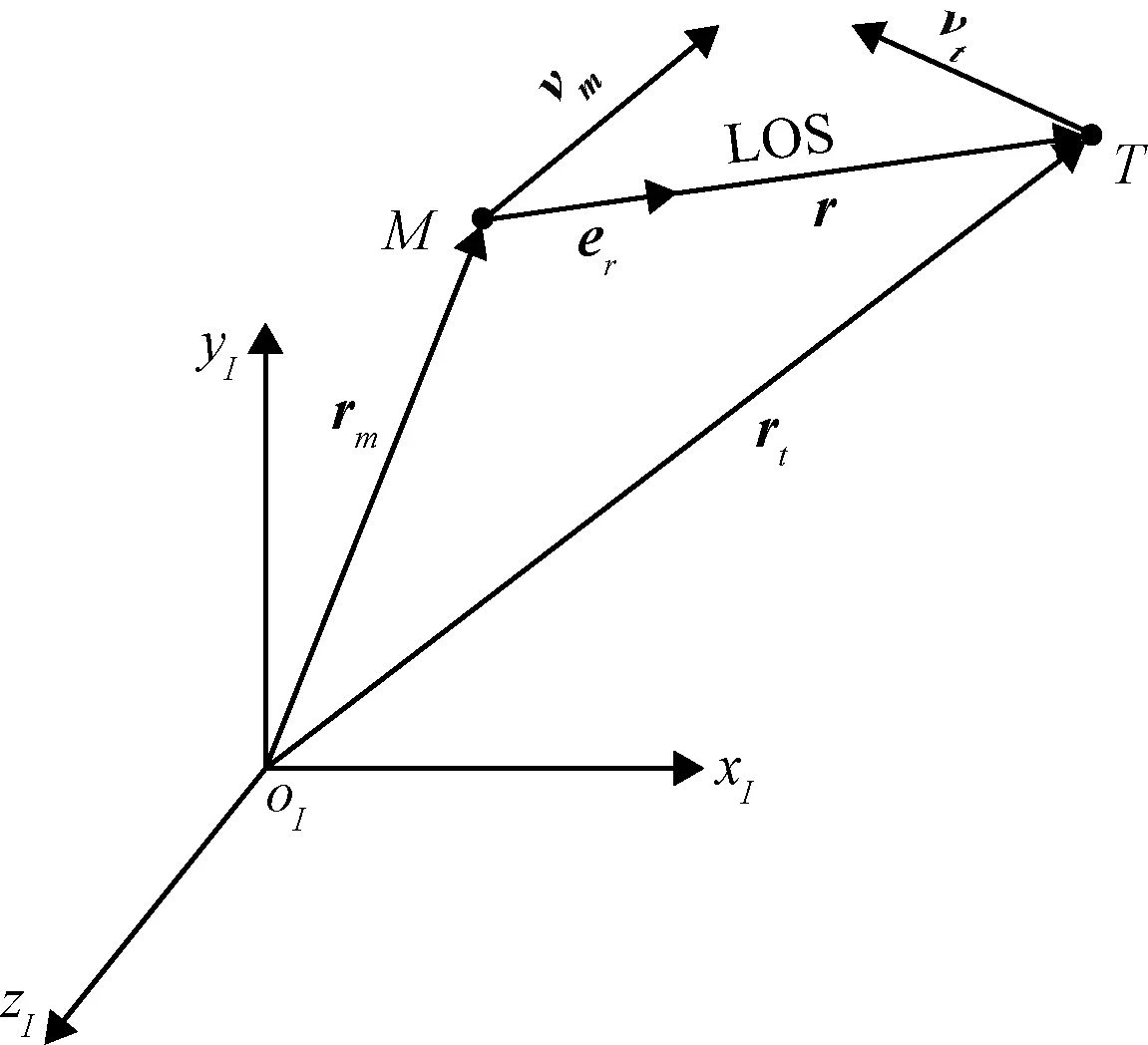
圖1 彈目攔截交戰(zhàn)Fig.1 Intercept engagement between missile and target
由圖1可知,彈目相對運動的位置關(guān)系為
r=rt-rm=rer
(1)
式中:r為彈目之間的相對距離,er為視線方向上的單位矢量。因為目標(biāo)相對于導(dǎo)彈的位置變化,視線在慣性空間中會產(chǎn)生旋轉(zhuǎn),設(shè)其旋轉(zhuǎn)角速度為ω。由于視線的旋轉(zhuǎn)完全決定于導(dǎo)彈和目標(biāo)的速度在垂直視線方向上的分量,因此視線的旋轉(zhuǎn)角速度垂直于視線,且
(2)
式中:v=vt-vm,eω為ω方向上的單位矢量,ω為視線旋轉(zhuǎn)的角速度大小,簡稱視線轉(zhuǎn)率。求取式(1)的時間導(dǎo)數(shù)并聯(lián)立式(2)得
(3)

為了定量描述彈目的相對運動,本文采用文獻(xiàn)[16]提出的視線旋轉(zhuǎn)坐標(biāo)系。相比于文獻(xiàn)[6,9]所示的視線坐標(biāo)系,由此建立的方程形式簡潔,不存在耦合。定義單位矢量eθ=eω×er,(er,eθ,eω)構(gòu)成的直角坐標(biāo)系即為視線旋轉(zhuǎn)坐標(biāo)系,原點位于導(dǎo)彈的質(zhì)心處,er和eθ張成的平面稱為交會平面,eω為該平面的法向。基于上述定義,可得如下關(guān)系[16]:
(4)
式中:Ω為交會平面旋轉(zhuǎn)角速度大小。對式(3)繼續(xù)求導(dǎo)并聯(lián)立式(4)可得彈目相對運動的標(biāo)量方程組為
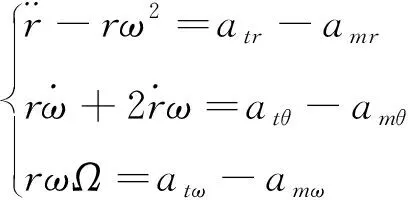
(5)
式中:atr、atθ與atω為目標(biāo)加速度在視線旋轉(zhuǎn)坐標(biāo)系下的三個分量,amr、amθ與amω為導(dǎo)彈加速度在視線旋轉(zhuǎn)坐標(biāo)系下的三個分量。式(5)表明,交會平面內(nèi)的相對運動與其轉(zhuǎn)動是解耦的。
在進(jìn)行制導(dǎo)律設(shè)計之前,作如下假設(shè)。
假設(shè)1. 忽略導(dǎo)彈導(dǎo)引頭和控制系統(tǒng)的動態(tài)特性,認(rèn)為其可以實現(xiàn)理想的制導(dǎo)過程。
假設(shè)2. 目標(biāo)的機動幅值是有限的。

2 自適應(yīng)積分滑模制導(dǎo)律
2.1 制導(dǎo)律設(shè)計
攔截制導(dǎo)律設(shè)計的基本原則是抑制視線的旋轉(zhuǎn),將導(dǎo)彈控制在與目標(biāo)組成碰撞或準(zhǔn)碰撞三角形的位置上[4]。由式(5)可知,通過設(shè)計合理的amθ即可控制ω的變化。
令vθ=rω,則式(5)的第二式可表示為
(6)
定義如下誤差變量
e=vθ-vθc
(7)
式中:vθc為vθ的期望值。vθc的剖面表達(dá)式設(shè)計為
(8)
式中:r0和ω0分別為攔截初始時刻r和ω的相應(yīng)值,Δ≥0,η≥1。由式(8)可知,當(dāng)r→0時,vθc→Δ,通過改變η可調(diào)整vθc的收斂速率,且初始時刻的e值取為零,為了防止攔截起始階段的導(dǎo)彈過載過大。

(9)
式中:atθ和amθ分別為系統(tǒng)的干擾和控制輸入。本文的目標(biāo)是設(shè)計合適的amθ,在未知有界干擾atθ存在的條件下,使系統(tǒng)狀態(tài)有限時間內(nèi)收斂至零或其鄰域內(nèi)。取如下形式的積分滑模面[17]:
(10)
式中:t≥t0,l1>0,l2>0, 0<α<1, sgn(·)為符號函數(shù)。滑模變量s(t0)=0意味著在攔截起始時刻系統(tǒng)狀態(tài)即位于滑模面上。對式(10)求導(dǎo)并聯(lián)立式(9),可得
(11)
設(shè)定如下的快速趨近律:
(12)
式中:k1>0,k2>0, 0<μ<1。聯(lián)立式(11)-(12),可得積分滑模制導(dǎo)律(Integral sliding-mode guidance law, ISMGL)的表達(dá)式為
(13)
式(13)包含未知的目標(biāo)加速度項atθ,致使其無法應(yīng)用,為此采用自適應(yīng)控制方法對|atθ|上界的平方進(jìn)行估計。根據(jù)假設(shè)2,可設(shè)|atθ|≤d,d為正常數(shù),引入如下形式的自適應(yīng)律對κ=d2進(jìn)行估計[15]:
(14)

(15)

(16)
式中:satδ1(x1)為飽和函數(shù),表達(dá)式為
(17)
satδ2(x2)與satδs(s)以此類推。
2.2 穩(wěn)定性分析
在對AISMGL進(jìn)行穩(wěn)定性分析之前,先給出需用的引理。
引理1[18]. 定義在包含原點的鄰域U?Rn上的光滑正定函數(shù)V(x,t),若存在實數(shù)a、b>0, 0<γ<1,使得下式成立:
(18)
則該函數(shù)值將在有限時間內(nèi)收斂至零,且收斂時間滿足
(19)
式中:x(t0)=x0,t0為初始時刻。
引理2[19]. 對于雙重積分系統(tǒng):
(20)
若采用如下形式的反饋律:
(21)
式中:g1>0,g2>0, 0
定理1. 針對式(9)所示的非線性制導(dǎo)系統(tǒng),若采用設(shè)計的AISMGL進(jìn)行制導(dǎo),有如下結(jié)論成立:
1) 滑模變量有限時間收斂至|s|≤Θ。
2) 系統(tǒng)狀態(tài)分別有限收斂至|x1|≤Θ2和|x2|≤Θ3。
各收斂域的具體表達(dá)式為
(22)
式中:Θ1為與d、ζ和Θ有關(guān)的正常數(shù),ζ定義見證明過程。
證. 取如下形式的Lyapunov函數(shù):
(23)
(24)
(25)
聯(lián)立式(25)和(14),代入式(24)可得
(26)
由基本不等式可得
(27)
將式(27)代入式(26)有
-χV1+ψ
(28)


(29)
對其求導(dǎo)得
(30)
(31)
(32)
將式(32)改寫成如下兩種形式[20]:
(33)

(34)
同理,可得x2的收斂域為
(35)
證畢。
3 制導(dǎo)指令轉(zhuǎn)換
根據(jù)制導(dǎo)指令作用方向的不同,攔截制導(dǎo)律可主要劃分為垂直導(dǎo)彈速度和彈目視線兩類。由于大氣層內(nèi)攔截彈利用氣動力提供機動過載,大氣層外的攔截彈利用安裝在彈體質(zhì)心處的軌控發(fā)動機提供機動過載,因此垂直導(dǎo)彈速度和彈目視線的制導(dǎo)律分別適用于大氣層內(nèi)和外的攔截。鑒于式(16)表示的AISMGL的作用方向垂直于視線,為了應(yīng)對大氣層內(nèi)的機動目標(biāo),采用如下形式的制導(dǎo)指令轉(zhuǎn)換[21]:
(36)
式中:am為導(dǎo)彈的制導(dǎo)加速度,nm為垂直于導(dǎo)彈速度的單位矢量。
為了保證式(36)中的分母不為零,令
nm·eθ=λ
(37)
式中:0<λ≤1。同時,nm還須滿足以下兩約束[22]:
(38)
式中:tm為導(dǎo)彈速度方向上的單位矢量。聯(lián)立式(37)-(38)可解得nm存在的條件為
1-(tm·eθ)2≥λ2
(39)
由式(39),將λ設(shè)置為
(40)
式中:σ>0足夠小。由此,可獲得兩個滿足條件的解,記作nm1與nm2。考慮到制導(dǎo)指令的連續(xù)性,應(yīng)取滿足如下條件的解:
(41)

4 仿真校驗
為了校驗AISMGL的有效性,對不同類型的機動目標(biāo)實施了攔截仿真。同時,考慮現(xiàn)有的兩種制導(dǎo)律與AISMGL作比較,分別為經(jīng)典的PPN制導(dǎo)律和文獻(xiàn)[10]中基于有限時間穩(wěn)定理論與擴張狀態(tài)觀測器設(shè)計的微分幾何制導(dǎo)律,簡記為DGGL-FE。PPN的表達(dá)式為
am=N1ω×vm
(42)
式中:N1為有效導(dǎo)航比。DGGL-FE的表達(dá)式為
(43)

導(dǎo)彈和目標(biāo)在慣性坐標(biāo)系oIxIyIzI下的初始狀態(tài)如表1所示。
表1 導(dǎo)彈和目標(biāo)初始狀態(tài)Table 1 Initial states of missile and target


(44)

基于上述攔截條件,仿真結(jié)果如圖2-6和表3
表2 制導(dǎo)律參數(shù)Table 2 Parameter settings for guidance laws
所示。由圖3可知,制導(dǎo)系統(tǒng)的狀態(tài)變量快速地收斂至零附近,vθ較好地跟蹤了設(shè)計的期望值vθc,表明了自適應(yīng)算法抑制目標(biāo)機動干擾的有效性。由于PPN未對目標(biāo)機動做專門處理,在圖4中相比于AISMGL與DGGL-FE,其視線轉(zhuǎn)率無法得到有效抑制。DGGL-FE的視線轉(zhuǎn)率在有限時間內(nèi)收斂至零附近;由于η=2,AISMGL的視線轉(zhuǎn)率呈準(zhǔn)線性減小的趨勢,與式(8)相吻合。圖5給出了過載分布曲線,AISMGL的過載分布均勻。由于系統(tǒng)狀態(tài)在攔截初始時刻即位于滑模面上,因此AISMGL的起始段過載較小,而DGGL-FE由于嵌入的觀測器存在估計誤差的初始尖峰現(xiàn)象,致使初始過載較大。在能量消耗方面,AISMGL明顯優(yōu)于PPN,且低于補償目標(biāo)加速度的DGGL-FE,表明控制視線轉(zhuǎn)率提前收斂會消耗更多能量。
圖2 攔截軌跡(情景一)Fig.2 Intercept trajectories (scenario 1)
圖3 系統(tǒng)變量隨時間變化(情景一)Fig.3 System variables versus time (scenario 1)
圖4 視線轉(zhuǎn)率隨時間變化(情景一)Fig.4 LOSR rate versus time (scenario 1)
圖5 制導(dǎo)加速度大小隨時間變化(情景一)Fig.5 Guidance acceleration magnitude versus time (scenario 1)
制導(dǎo)律脫靶量/m總能量消耗/(m·s-1)AISMGL0.085411.16DGGL-FE0.203425.87PPN0.266582.44
情景二:目標(biāo)正弦機動,參數(shù)設(shè)置與情景一相同,仿真結(jié)果如圖7-11和表4所示。由仿真結(jié)果可知,與情景一相同,AISMGL的初始過載小,過載分布均勻。在脫靶量和總能量消耗方面AISMGL依然優(yōu)于PPN,稍遜于DGGL-FE,表明此時控制視線轉(zhuǎn)率盡早收斂可降低制導(dǎo)指令隨著目標(biāo)的正弦機動進(jìn)行振蕩的幅度,更有利于節(jié)省能量。
圖7 攔截軌跡(情景二)Fig.7 Intercept trajectories (scenario 2)

圖8 系統(tǒng)變量隨時間變化(情景二)Fig.8 System variables versus time (scenario 2)
圖9 視線轉(zhuǎn)率隨時間變化(情景二)Fig.9 LOS rate versus time (scenario 2)
圖11 能量消耗隨時間變化(情景二)Fig.11 Energy consumption versus time (scenario 2)
制導(dǎo)律脫靶量/m總能量消耗/(m·s-1)AISMGL0.534461.91DGGL-FE0.480454.86PPN1.089478.88
與DGGL-FE相比,AISMGL可通過直接調(diào)節(jié)參數(shù)η來定量地控制視線轉(zhuǎn)率的收斂速率,而DGGL-FE由于嵌入的觀測器存在估計誤差無法精確地給出視線轉(zhuǎn)率的收斂時間。圖12給出了不同η條件下攔截常值和正弦機動目標(biāo)時視線轉(zhuǎn)率的變化,η值越大其收斂速率越快。圖13給出了脫靶量和總能量消耗隨η的變化,脫靶量稍有波動,基本處于同一水平,不同機動形式下總能量消耗隨η的變化趨勢不同。
情景三:情景一與情景二均是在確定性的條件下實施的攔截仿真,但在實際的攔截中,制導(dǎo)信息不可避免地含有測量噪聲。因此,為了驗證所設(shè)計制導(dǎo)律的噪聲特性,考慮相對距離、相對距離變化率、視線角和視線角速率的實際測量量中分別含有三倍標(biāo)準(zhǔn)差為10 m、10 m/s、0.01°和0.01/((°)/s)的高斯白噪聲,并在上述仿真條件的基礎(chǔ)上進(jìn)行了300次的蒙特卡洛仿真,圖14~圖15分別給出了攔截常值和正弦機動目標(biāo)時脫靶量和總能量消耗的統(tǒng)計結(jié)果。可看出,所設(shè)計的AISMGL具有良好的噪聲特性,脫靶量和總能量消耗的波動范圍較小,依然保持了確定性條件下的制導(dǎo)品質(zhì),易于工程實現(xiàn)。

圖12 不同η下視線轉(zhuǎn)率收斂Fig.12 LOSR convergences under different values of η
圖13 脫靶量和總能量消耗隨η的變化Fig.13 Miss distance and total energy consumption versus η
圖14 常值機動的統(tǒng)計分布Fig.14 Statistical distributions of constant maneuvering
圖15 正弦機動的統(tǒng)計分布Fig.15 Statistical distributions of sinusoidal maneuvering
5 結(jié) 論
本文從抑制彈目視線旋轉(zhuǎn)的基本原則出發(fā),設(shè)計了視線轉(zhuǎn)率收斂速率可調(diào)的跟蹤剖面,采用自適應(yīng)積分滑模控制和制導(dǎo)指令轉(zhuǎn)換方法推導(dǎo)了適用于攔截大氣層內(nèi)機動目標(biāo)的自適應(yīng)積分滑模制導(dǎo)律。仿真結(jié)果表明,文中所提出的制導(dǎo)律可精確命中機動目標(biāo),剖面跟蹤誤差能夠在有限時間內(nèi)快速收斂,并具有良好的噪聲特性,易于工程實現(xiàn)。與已有制導(dǎo)律相比,可通過調(diào)整剖面參數(shù)靈活控制視線轉(zhuǎn)率的收斂速率,過載分布均勻,能量消耗少。后續(xù)研究考慮如何智能地調(diào)整視線轉(zhuǎn)率的收斂速率來進(jìn)一步降低能量消耗。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04