基于地軸矢量解算的SINS無(wú)緯度支持自對(duì)準(zhǔn)方法
2019-02-15 08:47:44鄭振宇周愛(ài)軍徐軒彬
宇航學(xué)報(bào) 2019年1期
關(guān)鍵詞:實(shí)驗(yàn)方法
鄭振宇,周愛(ài)軍,唐 君,徐軒彬
(海軍大連艦艇學(xué)院, 大連 116018)
0 引 言
捷聯(lián)慣導(dǎo)系統(tǒng)(SINS)初始對(duì)準(zhǔn)的最終目標(biāo)是確定載體坐標(biāo)系相對(duì)導(dǎo)航坐標(biāo)系的姿態(tài)關(guān)系。現(xiàn)有的初始對(duì)準(zhǔn)理論與方法,如基于卡爾曼濾波的對(duì)準(zhǔn)方法、羅經(jīng)對(duì)準(zhǔn)法以及近年來(lái)提出的基于最優(yōu)化的慣性系對(duì)準(zhǔn)方法(OBA方法)等[1-4],在方法應(yīng)用中都需要精確的緯度信息支持。目前,對(duì)準(zhǔn)所需緯度信息主要源于衛(wèi)星或無(wú)線電定位手段,然而,對(duì)于水下、地下、密林等無(wú)線電信號(hào)覆蓋不到,或在高架橋、高層樓宇遮擋導(dǎo)致信號(hào)覆蓋微弱的區(qū)域,要獲得緯度值并非易事,因此,研究無(wú)緯度支持下的對(duì)準(zhǔn)方法成為近年來(lái)初始對(duì)準(zhǔn)研究的一個(gè)重要方向。
針對(duì)靜止基座下未知緯度對(duì)準(zhǔn)問(wèn)題,文獻(xiàn)[5]提出利用導(dǎo)航系下重力與地球自轉(zhuǎn)角速度矢量的夾角估計(jì)緯度,再利用估計(jì)緯度采用傳統(tǒng)解析方法實(shí)現(xiàn)粗對(duì)準(zhǔn)。在晃動(dòng)基座下,文獻(xiàn)[6]提出利用重力矢量在慣性空間的角位置關(guān)系確定緯度,再利用估計(jì)緯度進(jìn)行傳統(tǒng)意義的慣性系對(duì)準(zhǔn),并分析了緯度估計(jì)的精度與對(duì)準(zhǔn)精度。上述方法均采用先進(jìn)行緯度估計(jì)再對(duì)準(zhǔn)的兩階段模式,后者以前者為基礎(chǔ),增加了方法應(yīng)用的復(fù)雜性;另外,緯度估計(jì)與對(duì)準(zhǔn)都源于矢量觀測(cè)信息,觀測(cè)信息被重復(fù)利用,從信息處理的角度,對(duì)準(zhǔn)效率有待提高。那么,能否利用矢量觀測(cè)信息直接實(shí)現(xiàn)無(wú)緯度支持下的對(duì)準(zhǔn)解算呢?

1 基于地軸矢量解算的對(duì)準(zhǔn)思路

1.1 靜止基座下的對(duì)準(zhǔn)思路
(1)
(2)
1.2 晃動(dòng)基座對(duì)準(zhǔn)思路
2 靜止基座下直接解析對(duì)準(zhǔn)方法
2.1 直接解析對(duì)準(zhǔn)算法
(3)
式(3)中未出現(xiàn)緯度值,同時(shí)矩陣各行向量均為單位向量且相互正交,無(wú)需額外進(jìn)行正交化處理,相對(duì)傳統(tǒng)的解析式對(duì)準(zhǔn)方法更具工程實(shí)用性。
2.2 與傳統(tǒng)解析法的統(tǒng)一關(guān)系
將式(3)變形后可得到:
(4)

(5)
顯然,式(5)即為傳統(tǒng)的解析對(duì)準(zhǔn)方法解算模型。因此,直接解析對(duì)準(zhǔn)方法在重力矢量與地球自轉(zhuǎn)角速度矢量模約束與兩個(gè)矢量夾角約束條件下即轉(zhuǎn)化為傳統(tǒng)解析式對(duì)準(zhǔn)方法。
2.3 精度分析
(6)

(7)
(8)
當(dāng)不考慮矢量模誤差時(shí),有μ1=g,μ2=gΩcosL,此時(shí),式與傳統(tǒng)解析對(duì)準(zhǔn)的誤差模型一致[8]。
當(dāng)考慮矢量模誤差影響時(shí),以加速度計(jì)觀測(cè)模為例,根據(jù)模解算關(guān)系有:
(9)

1/μ1=[1-δfb/(2g2)]/g
(10)
以加速度計(jì)誤差為1000 μg為例,經(jīng)計(jì)算由矢量模誤差引起的姿態(tài)誤差約為0.2″,因此,誤差分析中可以忽略模觀測(cè)誤差的影響。
下面分析重力矢量指向誤差引起的姿態(tài)誤差。假設(shè)重力矢量指向偏差引起的緯度誤差為δL,則μ2=gΩcos(L+δL),帶入式中的方位誤差項(xiàng)得:
(11)
泰勒展開并忽略二階小量后得到由重力矢量指向偏差引起的方位誤差項(xiàng)為:
(12)
以地球表面最大垂線誤差30″為例,假設(shè)緯度為45°,陀螺常值漂移誤差為0.1 (°)/h,加速度計(jì)零偏為1000 μg,則由此引起的方位誤差僅為0.14″。因此,在實(shí)際應(yīng)用中無(wú)需考慮矢量模誤差以及重力矢量指向誤差的影響,直接解析對(duì)準(zhǔn)方法與傳統(tǒng)解析對(duì)準(zhǔn)方法具有相同的理論極限精度。
3 基于地軸矢量解算的晃動(dòng)基座自對(duì)準(zhǔn)方法
3.1 對(duì)準(zhǔn)基本流程
(13)
(14)
(15)
重力矢量觀測(cè)在某一時(shí)間點(diǎn)上可以獲得該時(shí)刻導(dǎo)航系天向軸矢量Ub0:
(16)
3.2 地軸矢量的三矢量幾何解算方法
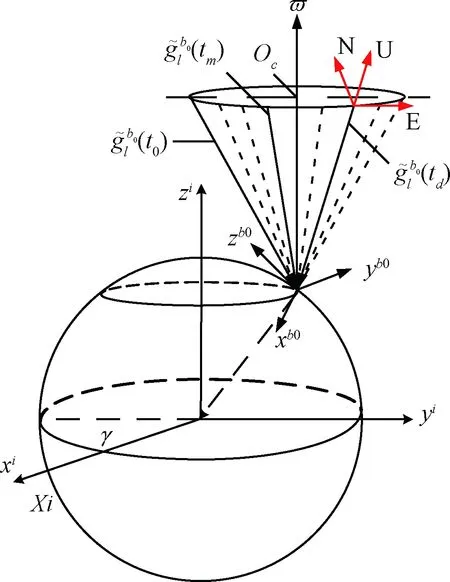
圖1 重力矢量載體慣性系視運(yùn)動(dòng)Fig.1 Gravitational apparent motion in b0-frame
1)計(jì)算三個(gè)矢量的差分矢量Δg1與Δg2:
(17)
2)根據(jù)叉乘關(guān)系計(jì)算地軸方向矢量:
u=Δg1×Δg2
(18)
3)根據(jù)矢量關(guān)系建立差分矢量Δg1與Δg2的中垂線矢量l1及l(fā)2:
(19)
4)計(jì)算三個(gè)矢量間的中心位置∑g1與∑g2:
(20)
5)建立l1及l(fā)2的中垂線方程組:
(21)
3.3 地軸矢量的四元數(shù)解算方法
(22)

(23)
(24)


(25)
(26)

(27)
4 實(shí)驗(yàn)驗(yàn)證
4.1 靜止基座對(duì)準(zhǔn)實(shí)驗(yàn)驗(yàn)證
4.1.1仿真實(shí)驗(yàn)
以靜止基座下100 s的加速度計(jì)、陀螺數(shù)據(jù)為解算數(shù)據(jù),仿真中設(shè)陀螺儀常值漂移為0.1 (°)/h,隨機(jī)漂移0.01 (°)/h;加速度計(jì)零偏為1000 μg,隨機(jī)噪聲為100 μg。蒙特卡洛仿真次數(shù)設(shè)為100次,仿真步長(zhǎng)設(shè)為0.01 s。分別采用文獻(xiàn)[5]與式(3)的直接解析對(duì)準(zhǔn)方法進(jìn)行同等條件對(duì)準(zhǔn)解算,解算后傳統(tǒng)方法需要進(jìn)行正交化解算,最終解算誤差以及100次Matlab解算消耗時(shí)間結(jié)果如表1所示。由結(jié)果可知,兩種解析式對(duì)準(zhǔn)方法的誤差均值差別不大,直接解析法的方位誤差均方差要小于傳統(tǒng)方法;同時(shí),由于直接解析法無(wú)需緯度估計(jì),且無(wú)需正交化過(guò)程,仿真運(yùn)算耗時(shí)小于傳統(tǒng)方法,解算效率較高。
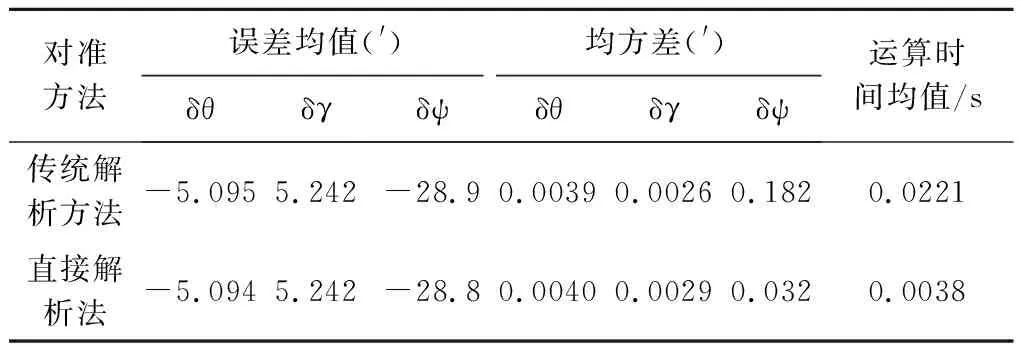
表1 兩種解析式對(duì)準(zhǔn)方法精度及運(yùn)算時(shí)間比較Table 1 Analytic alignment methods’ run time and precisions
4.1.2轉(zhuǎn)臺(tái)靜止基座實(shí)驗(yàn)
實(shí)驗(yàn)采用SGT-3型三軸多功能實(shí)驗(yàn)轉(zhuǎn)臺(tái),實(shí)驗(yàn)對(duì)象為自研光纖捷聯(lián)航姿系統(tǒng),捷聯(lián)系統(tǒng)安裝于試驗(yàn)轉(zhuǎn)臺(tái),令X軸指內(nèi)框軸、Y軸指中框軸、Z軸指外框軸。將轉(zhuǎn)臺(tái)內(nèi)中外框置零,保持靜止10 min,在此基礎(chǔ)上內(nèi)、中框位置不動(dòng),外框轉(zhuǎn)至45°位置,保持靜止10 min;再分別令外框置于90°、135°、180°、225°、270°、315°,連續(xù)采集8個(gè)方位位置的IMU數(shù)據(jù),完成對(duì)準(zhǔn)采集實(shí)驗(yàn)。采集成后,分別截取8個(gè)方位下平臺(tái)穩(wěn)定后5 min的數(shù)據(jù),并進(jìn)行直接解析式對(duì)準(zhǔn)解算,8次解算誤差如表2所示,其中方法1為傳統(tǒng)解析算法,方法2為直接解析方法。由表2可看出,在無(wú)緯度支持條件下直接解析式對(duì)準(zhǔn)精度與傳統(tǒng)解析方法基本相同,具有較強(qiáng)的實(shí)用價(jià)值。
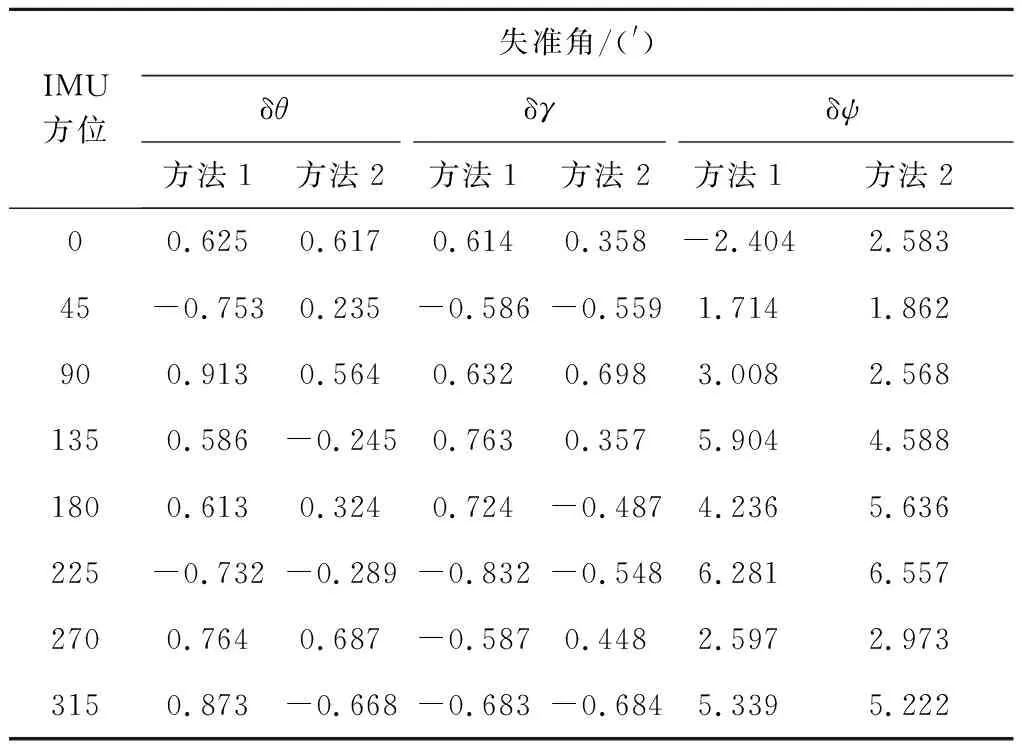
表2 轉(zhuǎn)臺(tái)下8位置解析對(duì)準(zhǔn)精度Table 2 Analytic alignment precisions of eight positions on turntable
4.2 晃動(dòng)基座對(duì)準(zhǔn)仿真校驗(yàn)
仿真中慣性器件參數(shù)設(shè)置及蒙特卡洛樣本數(shù)與4.1節(jié)相同,對(duì)晃動(dòng)基座下基于地軸矢量的對(duì)準(zhǔn)方法進(jìn)行驗(yàn)證分析。仿真中模擬基座航向ψ、縱搖θ及橫搖γ角呈周期性變化,幅度分別為4°、5°與7°,搖擺周期分別為7、5與6 s。設(shè)桿臂長(zhǎng)度為(0.05、0.05、0.05 m),橫蕩、縱蕩和垂蕩引起的線速度也呈周期性變化,其模型為:
VDi=ADiωDicos(ωDit+φDi)
(28)
其中,ADx=0.02m/s,ADy=0.03 m/s,ADz=0.2 m/s,ωDi=2π/TDi,TDx=7 s,TDy=6 s,TDz=8 s,φd為[0 2π]上服從均勻分布的隨機(jī)相位。對(duì)準(zhǔn)解算時(shí)間為200 s,地軸矢量解算方法分別采用三矢量定姿及基于四元數(shù)的優(yōu)化算法,稱為未知緯度1及未知緯度2方法。
首先,不引入觀測(cè)濾波環(huán)節(jié),重點(diǎn)考查兩種方法的有效性,方位對(duì)準(zhǔn)誤差分布結(jié)果如圖2所示,姿態(tài)誤差均值及均方差結(jié)果如表3所示。由結(jié)果可以看出,兩種方法水平對(duì)準(zhǔn)結(jié)果近似重合,精度上基本一致,但方位誤差相差較大,說(shuō)明方法采用不同的軸向矢量解算方法僅影響方位解算精度對(duì)水平對(duì)準(zhǔn)精度幾乎沒(méi)有影響。由圖3可看出方法1的方位對(duì)準(zhǔn)精度較差,對(duì)準(zhǔn)解算超差現(xiàn)象嚴(yán)重,分析其原因,是由于對(duì)準(zhǔn)時(shí)間較短,方法1構(gòu)建的中垂線方程易形成病態(tài)方程,矢量觀測(cè)未進(jìn)行濾波,觀測(cè)噪聲過(guò)大,容易形成奇異解,造成方位對(duì)準(zhǔn)失效[12]。然而方法2的地軸矢量解算來(lái)源于更為全面的觀測(cè)數(shù)據(jù),且采用最優(yōu)姿態(tài)解算算法,算法解算穩(wěn)定性較好,方位對(duì)準(zhǔn)精度較高。
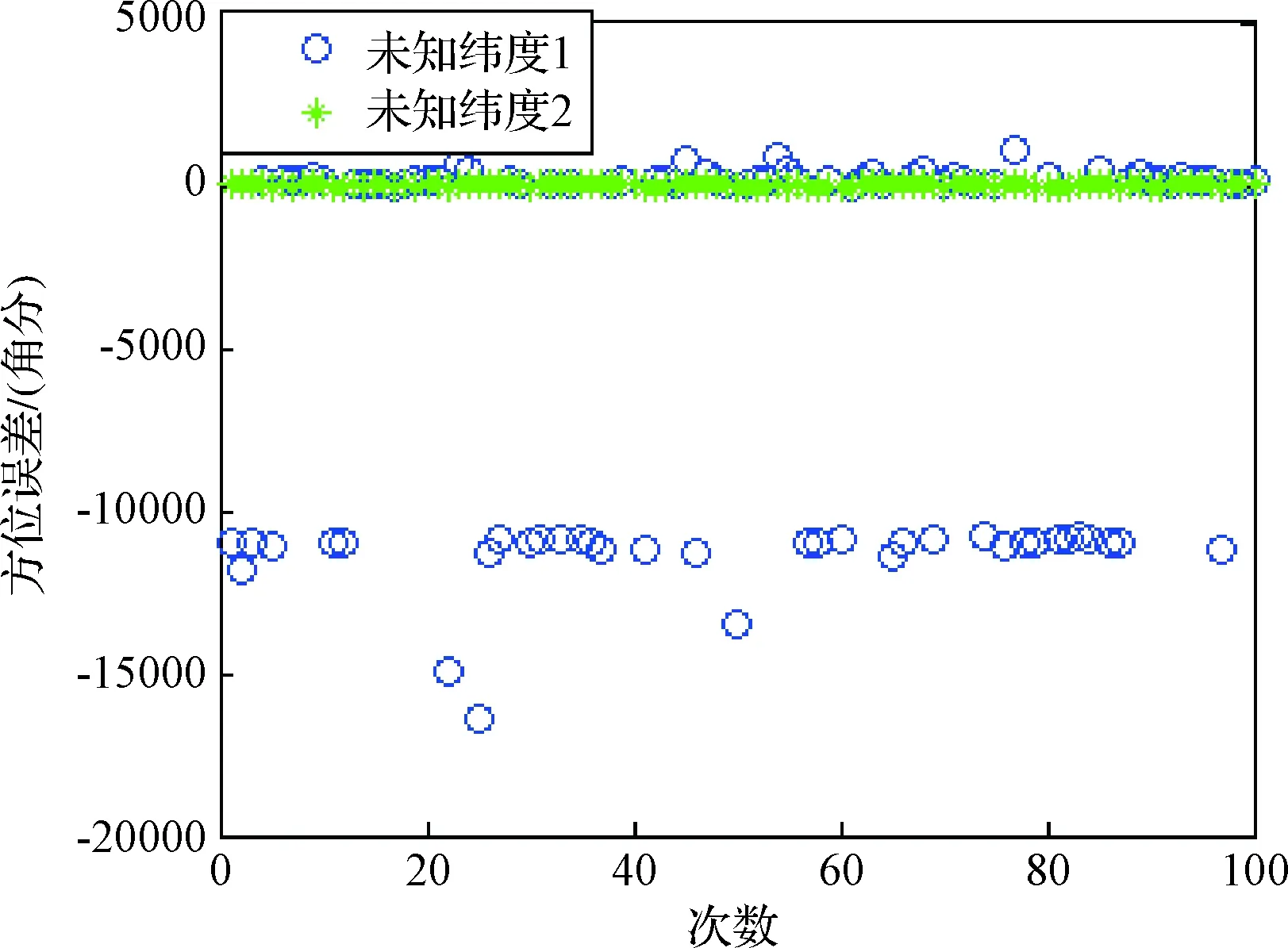
圖2 無(wú)濾波下?lián)u擺基座仿真實(shí)驗(yàn)方位對(duì)準(zhǔn)精度分布Fig.2 Simulation results distribution of alignment azimuth precision without filter

對(duì)準(zhǔn)方法對(duì)準(zhǔn)誤差均值/(')對(duì)準(zhǔn)均方差/(')δθδγδψδθδγδψ未知緯度方法1-3.1303.7083941.30.3690.3485646.5未知緯度方法2-3.1303.7088.21710.3690.34814.378
其次,對(duì)慣性系重力矢量觀測(cè)引入低通濾波環(huán)節(jié),考察濾波后的對(duì)準(zhǔn)精度情況,濾波器參數(shù)設(shè)置如表4所示。

表4 低通濾波器參數(shù)設(shè)置Table 4 Parameter setting of low-pass filter
低通濾波后的對(duì)準(zhǔn)誤差分布見圖3,統(tǒng)計(jì)結(jié)果見表5。不難發(fā)現(xiàn),引入低通濾波環(huán)節(jié)后重力矢量觀測(cè)精度得到了提高,對(duì)準(zhǔn)精度相應(yīng)得到提高。同時(shí),兩種對(duì)準(zhǔn)方法具有相同的水平對(duì)準(zhǔn)精度,但基于四元數(shù)解算的對(duì)準(zhǔn)方法的對(duì)準(zhǔn)誤差均值與均方差值都小于幾何解析對(duì)準(zhǔn)方法。
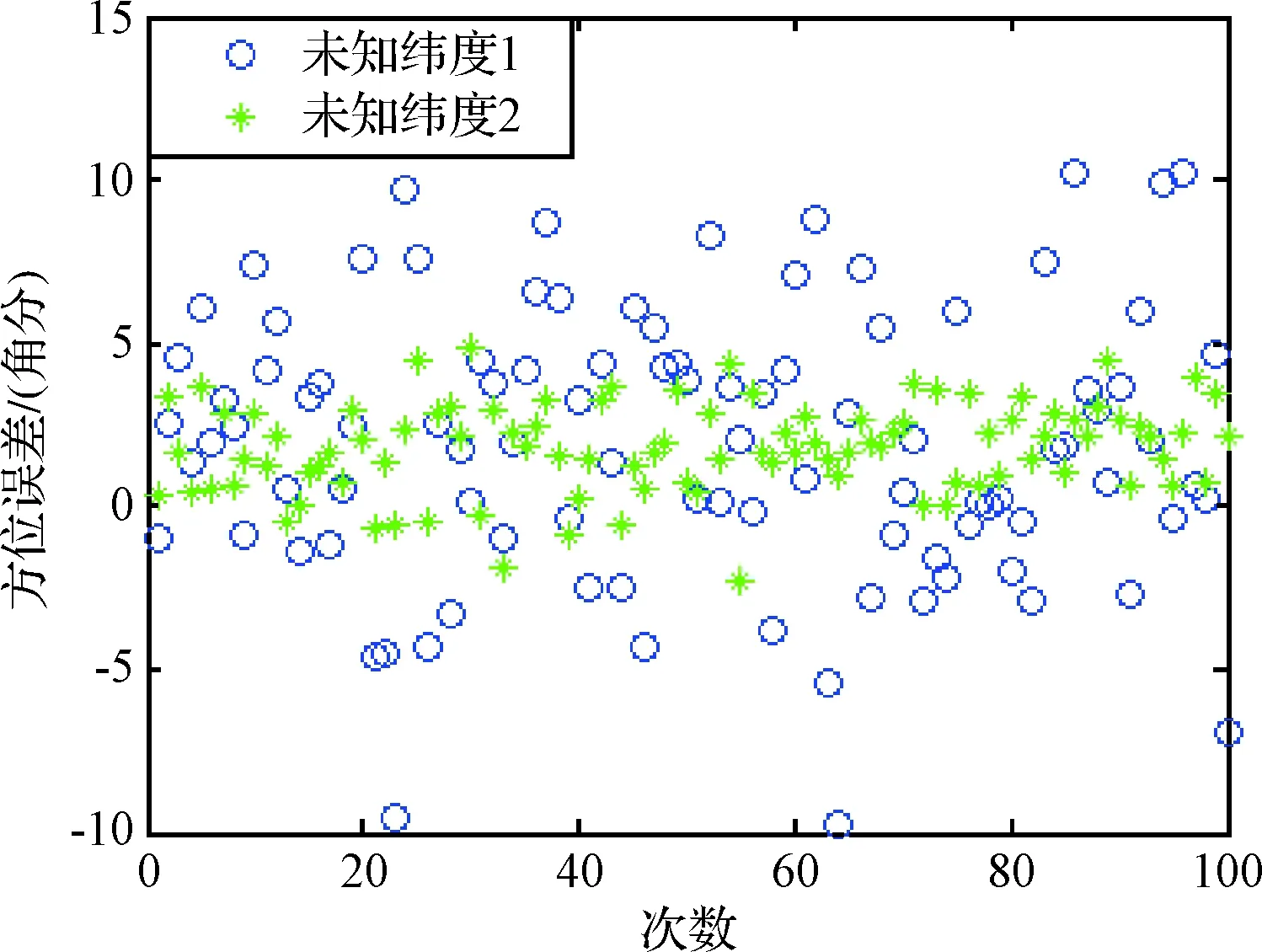
圖3 搖擺基座仿真實(shí)驗(yàn)方位對(duì)準(zhǔn)精度分布Fig.3 Distribution of simulation azimuth alignment precision
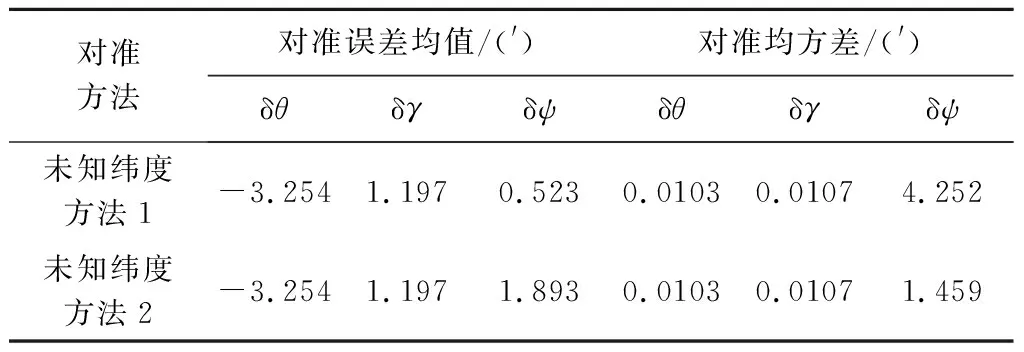
對(duì)準(zhǔn)方法對(duì)準(zhǔn)誤差均值/(')對(duì)準(zhǔn)均方差/(')δθδγδψδθδγδψ未知緯度方法1-3.2541.1970.5230.01030.01074.252未知緯度方法2-3.2541.1971.8930.01030.01071.459
4.3 船載實(shí)驗(yàn)驗(yàn)證
在仿真實(shí)驗(yàn)的基礎(chǔ)上,以海試實(shí)驗(yàn)數(shù)據(jù)為對(duì)象檢測(cè)本文對(duì)準(zhǔn)方法的實(shí)船環(huán)境適用性。試驗(yàn)海域?yàn)槟虾D澈S颍抡鏀?shù)據(jù)源于裝載于艦艇上的兩套自研光纖捷聯(lián)航姿系統(tǒng),其中,一套系統(tǒng)采用GPS位置組合導(dǎo)航工作方式,作為姿態(tài)基準(zhǔn),另一套系統(tǒng)輸出數(shù)據(jù)作為仿真數(shù)據(jù)源,如圖4所示。系統(tǒng)IMU光纖陀螺的零偏穩(wěn)定度優(yōu)于為0.01 (°)/h,加速度計(jì)零偏穩(wěn)定度優(yōu)于50 μg。對(duì)準(zhǔn)解算時(shí)間為200 s,數(shù)據(jù)解算起始時(shí)間每次向前推進(jìn)30 s,共進(jìn)行10次對(duì)準(zhǔn)解算,結(jié)合姿態(tài)基準(zhǔn)得到姿態(tài)誤差,10次對(duì)準(zhǔn)解算誤差結(jié)果如圖5所示。
可以看出,船載實(shí)驗(yàn)與仿真實(shí)驗(yàn)結(jié)果的精度分布特點(diǎn)基本一致。兩種對(duì)準(zhǔn)方法的水平對(duì)準(zhǔn)精度相同,橫搖角對(duì)準(zhǔn)誤差在8′以內(nèi),縱搖角對(duì)準(zhǔn)誤差在2′以內(nèi);采用本文方法的方位對(duì)準(zhǔn)精度(對(duì)準(zhǔn)誤差小于55′)要高于基于三矢量解析的對(duì)準(zhǔn)方法(對(duì)準(zhǔn)誤差小于75′),且方法2對(duì)準(zhǔn)結(jié)果的穩(wěn)定性也優(yōu)于方法1,表明基于四元數(shù)的地軸矢量解算方法在未知緯度條件下對(duì)準(zhǔn)應(yīng)用中具有較強(qiáng)的優(yōu)越性。
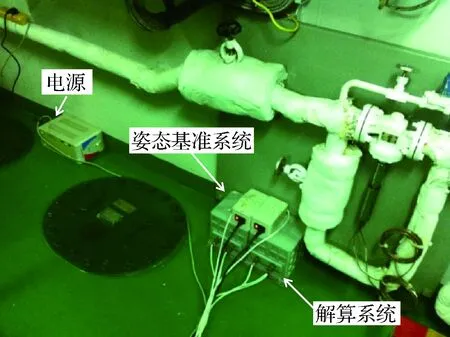
圖4 船載實(shí)驗(yàn)航姿系統(tǒng)配置Fig.4 Ship-borne fixing of IMU testing
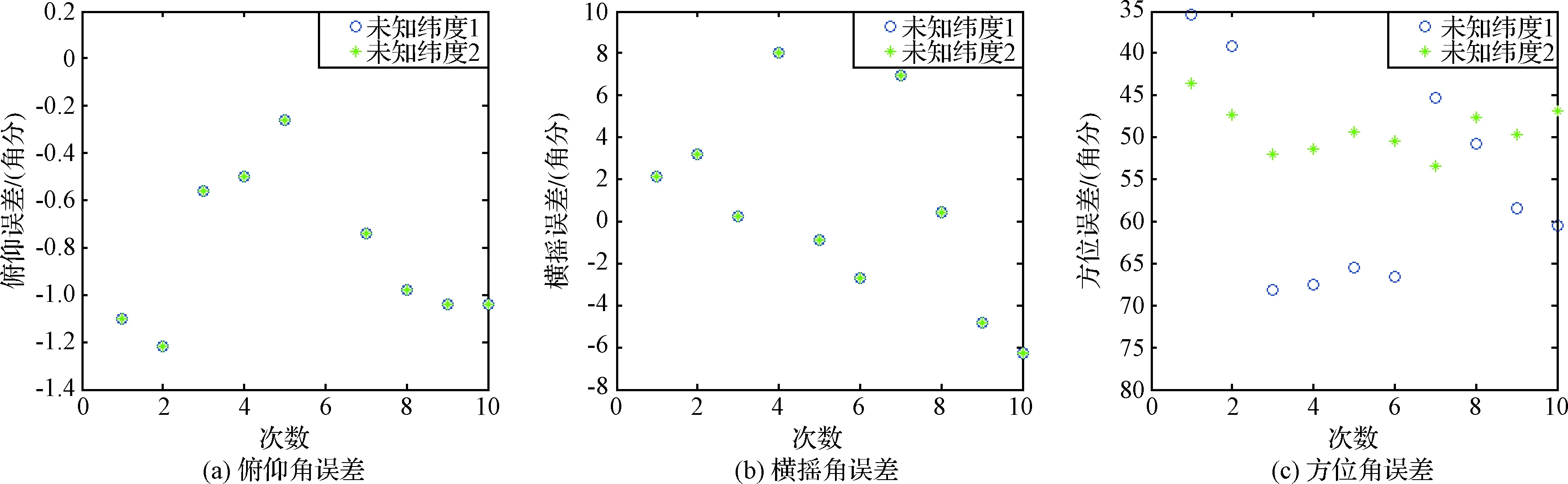
圖5 船載實(shí)驗(yàn)對(duì)準(zhǔn)誤差分布Fig.5 Distribution of ship-borne test alignment errors
5 結(jié) 論
本文將無(wú)緯度支持對(duì)準(zhǔn)問(wèn)題轉(zhuǎn)換為對(duì)地軸矢量在參考坐標(biāo)系下投影的解算問(wèn)題,并分別建立了靜止基座以及晃動(dòng)基座條件下的解決方案。仿真實(shí)驗(yàn)與轉(zhuǎn)臺(tái)實(shí)驗(yàn)分別驗(yàn)證了靜基座直接解析方法的有效性以及相對(duì)傳統(tǒng)解析對(duì)準(zhǔn)方法的高效性。針對(duì)晃動(dòng)基座下的地軸矢量解算問(wèn)題,提出了一種基于旋轉(zhuǎn)四元數(shù)的軸向矢量?jī)?yōu)化解算方法,仿真實(shí)驗(yàn)與船載實(shí)驗(yàn)驗(yàn)證了該解算方法相對(duì)于三矢量幾何解算方法的優(yōu)越性。下一步將針對(duì)重力矢量觀測(cè)的干擾問(wèn)題引入實(shí)用有效的預(yù)濾波方法,以進(jìn)一步提高方法的對(duì)準(zhǔn)精度。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56