海上風電場與航路安全距離
2019-02-24 05:00:42聶園園劉克中陳蜀喆
中國航海 2019年4期
關鍵詞:船舶
聶園園, 劉克中,b,c, 楊 星,b, 陳蜀喆,b, 馬 杰,b
(武漢理工大學 a.航運學院;b.內河航運技術湖北省重點實驗室; c.國家水運安全工程技術研究中心, 武漢 430063)
隨著海上風電的快速發展,海上風電場建設占用可航水域的面積也在逐漸增加,海上風電場水域船舶通航安全也越來越受到人們的關注。在進行海上風電場選址時,合理地設置擬建海上風電場與航路的安全距離是保障風電場附近船舶通航安全的最直接有效的措施,已成為海上船舶安全航行研究領域備受關注的問題之一。[1-4]
相對于海上石油平臺和橋梁而言,海上風電場建設起步較晚,因此,在海上設施與航路安全距離定量研究方面,針對石油平臺或橋梁的研究占大多數,而對于海上風電場的研究相對較少。例如,朱曼等[5]在分析失控船舶漂移運動模型的基礎上,建立失控船舶-橋碰撞概率計算模型,并根據可接受碰撞概率定量獲取橋區水域的通航范圍。HASSEL等[6]為研究船舶與石油平臺的安全距離,對平臺建設前后附近水域的船舶交通流數據進行統計分析,研究結果表明:在平臺建成后,大多數船舶自覺地與平臺保持1 n mile以上的通行距離。學者們在確定海上風電場與航路安全距離時往往會參照相關國際公約、法律法規以及行業規定等,或借鑒其他海上設施的研究成果,直接設定為某一具體范圍。[7-8]目前,也存在一些學者在研究海上風電場水域船舶交通或碰撞風險時,對兩者與風電場和航路距離之間的關系進行分析。例如,RAWSON等[2]通過統計Thanet海上風電場建設前后附近的船舶交通分布后,發現在建設前存在部分船舶穿過風電場場區的現象,而在建成后船舶與風電場的距離基本>0.5 n mile。WAWRUCH等[9]在對MARIN和GL碰撞風險模型進行對比分析之后,利用這兩種模型計算出風電場和航路距離分別為0 n mile、0.5 n mile和1.0 n mile時的船舶和風機碰撞概率,實現風電場與航路安全距離的基礎建模。CHANG等[10]為評價船舶定線對海上風電場水域通航安全的影響,在距離風電場不同位置處選取多個截面,并對各截面上的船舶交通流進行擬合,在此基礎上利用IWRAP模型計算出有、無船舶定線時船舶與風電場的碰撞概率。該研究涉及碰撞概率與風電場和航路距離之間的對應關系分析,能夠為風電場與航路的安全距離研究提供一種參考思路。
綜上所述,現有海上風電場水域船舶航行安全研究對于風電場與航路安全距離的定量分析探索較少,一些學者雖然能從船舶交通分布和船舶碰撞風險的角度進行分析,但研究不夠深入,缺少考慮船舶交通流、風、流和風電場規模等因素對安全距離界定的影響。基于此,本文構建全面的船舶與海上風電場碰撞概率計算模型,并根據可接受碰撞概率的標準來界定海上風電場與航路安全距離,從而建立一種滿足船舶與風電場碰撞概率處于可接受水平以內的安全距離計算方法,為風電場選址和風電場水域船舶航行風險研究提供理論支持。
1 船舶與風電場碰撞概率計算模型
1.1 船舶與風電場碰撞過程分析
根據船舶主機是否出現故障,可將船舶與風電場碰撞分為漂移碰撞和動力碰撞兩種類型。漂移碰撞是指船舶在風電場附近航行時,出現主機故障導致船舶失控,受風、流等環境因子的影響,可能漂移至風電場內與風機發生碰撞。船舶k失控后受到風、流的拖曳力,其漂移速度指向風電場,經過一段時間的漂移將進入風電場內,見圖1。船舶k若能在進入風電場前,及時自救或得到外界援助,也可避免發生碰撞。動力碰撞是指由于人為錯誤、惡劣天氣和風機干擾等因素引起的航行失誤,船舶在不斷接近風電場的過程中未能及時調整航向,船舶機動避碰失敗,導致與風電場發生碰撞。在既定航路上航行時,船舶航向改變通常較小,因此,動力碰撞發生的一個前提條件是船舶航行在將與風電場發生碰撞的區域內。船舶j與風電場發生動力碰撞的碰撞區域見圖1。
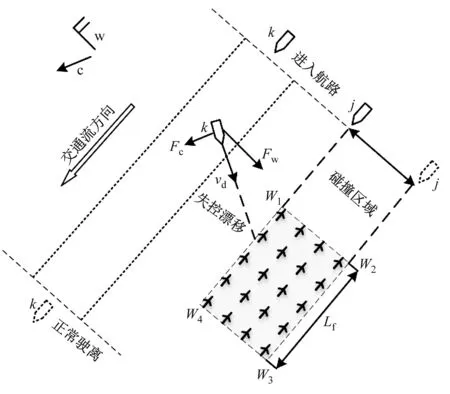
圖1 船舶與風電場碰撞過程
1.2 計算模型構建
1.2.1基本模型
基于對碰撞過程的分析,可將船舶與風電場碰撞概率計算模型分為漂移碰撞和動力碰撞概率子模型。通過拆分碰撞過程的不同階段,在漂移碰撞概率子模型中,需判斷船舶是否發生故障、漂移航跡是否朝向風電場及在進入風電場前能否獲得救援。在動力碰撞概率子模型中,判斷船舶是否位于碰撞區域內,主要取決于船舶位置和船舶航向。駛入碰撞區域上的船舶并不必然會與風電場發生碰撞,因此,還需考慮船員能否及時采取避碰措施。在上述分析的基礎上,考慮船舶交通量和船舶類型的影響,構建船舶與風電場碰撞概率計算模型為
P=P1+P2
(1)
(2)
(3)
式(1)~式(3)中:P為船舶與風電場發生碰撞的年平均概率;P1為船舶失控后與風電場發生漂移碰撞的年平均概率;P2為船舶與風電場發生動力碰撞的年平均概率;Ni為航路上第i類船舶的年交通量;Pib為第i類船舶發生失控的概率;x為船舶位置的橫坐標(以航路中軸線為縱坐標軸,以垂直于航路中軸線的直線為橫坐標軸);Bi為第i類船舶的平均寬度;f(x)為船舶橫向分布的概率密度函數;Pcw為船舶受風、流作用漂移至風電場的概率;PM1為船舶未能成功自救的概率;PM2為船舶未能成功得到外界援助的概率;θ為船舶航向;f(θ)為船舶的航向分布密度函數;θ1、θ2為船舶位于碰撞區域內時航向指向風電場邊界時的航向臨界值,θ1<θ2;xW1、xW2分別為W1、W2的橫坐標;PC為因果概率;Pr為船員無法及時做出避碰反應的概率。
1.2.2主要參數求取
Pib與船舶平均失控概率和船舶在航路上航行的時間有關,即
(4)
式(4)中:Pb為船舶每小時發生失控的概率,可通過統計事故數據獲得;L為航路長度;vi為第i類船舶的平均航速。
f(x)可通過統計船舶數據之后對船舶在航路寬度方向的數量進行擬合獲得。海上風電場一般建設于開闊水域,對于開闊水域而言,f(x)通常服從正態分布,[9-10]且
(5)
失控船舶在風、流等因素的共同作用下將產生一定的漂移速度,通過判斷該漂移速度的方向與風電場方位的一致性能夠確定Pcw的大小。其計算公式為
(6)
A={w|vw<0.2 m/s,w∈[1,Nw]}
(7)
式(6)~(7)中:Nw為風向種類數;Nc為流向種類數;Pw為w風向的概率;Pc為c流向的概率;Pa1、Pa2為在w風向和c流向時,失控船漂移速度vd的方向指向風電場的概率,主要與船舶失控位置以及風電場邊界長度Lf有關;w∈A指風向種類為靜風的情況。
確定vd的大小和方向首先需要掌握失控船舶的受力情況,失控船舶主要受風、流、波的作用,通過對失控船舶進行受力分析,可得到受力公式為
(8)
(9)
(10)
式(8)~式(10)中:M為船舶載重噸;mf為科氏力;Fw為風的拖曳力;FC為水的拖曳力;Fw為波浪輻射力;ρw和ρc分別為空氣和海水的密度;Sw和Sc分別為失控船舶暴露于水面以上和浸沒于水面以下的面積;Cw和Cc分別為空氣和水流的曳力系數。
假設失控船舶在任意時刻都處于平衡狀態,即dvd/dt=0,同時,忽略波浪的輻射力和mf,可得到
Fw+Fc=0
(11)
從而推導出vd的大小和vd與vw的夾角α分別見式(12)和式(13)。在Cw/Cc一定時,vd除與vw和vc有關,還與Sw/Sc有關。在船舶滿載時,Sw/Sc主要與船舶載重量M有關。
(12)
(13)
船員能通過修理故障,拋錨停航以及獲取外界援助等措施,避免與風電場發生碰撞。相關研究[11]通過統計分析,可得出船員未能及時修理船舶主機故障的概率取決于主機故障時間,見式(14)。船員未能通過拋錨阻止船舶漂移的概率隨風速的變化關系,也可通過查閱文獻得出。[11]

(14)
式(14)中:f(t)為船員沒能成功修理故障的概率,主要與vd和船舶與風電場的距離ds有關,vd越大,ds越小,f(t)越大;t為主機故障時間。
外界援助通常指應急拖船的救援行動。PM2主要與拖船噸位Mt、拖船速度vt、拖船與失控船舶的初始距離dt、失控船漂移速度vd和失控船舶載重量M等因素有關,具體為
PM2=f(Mt,vt,dt,vd,M)
(15)
對于P2而言,首先應獲得船舶交通橫向分布以及船舶航向分布,根據風電場位置和規模,確定船舶在碰撞區域內且航向也指向風電場的概率,通過分析船舶位置、航向與風電場間的幾何關系,得出θ1和θ2為
(16)
(17)
式(16)~式(17)中:y為船舶位置的縱坐標;yW1和yW2分別為W1和W2的縱坐標。
PC為船舶采取避碰措施失敗的概率,與船舶噸位、速度、導助航設備、通航環境和人為因素等有關,難以進行定量分析。國外相關學者已進行一些研究,FUJII等[12]通過分析歷史數據,提取事故發生之前船舶偏移被糾正的頻率,從而確定PC的數值。Pr主要取決于ds,借鑒MARIN碰撞模型[13]中的經驗公式,認為Pr=exp(-0.575×ds)。
1.2.3蒙特卡洛模擬
蒙特卡洛模擬方法是一種運用隨機數解決計算問題的方法,能夠通過多次抽樣試驗獲得問題的近似解,在水上交通安全領域中應用廣泛。[14-15]通過不斷生成服從船舶特征分布、環境特征分布的隨機數來計算船舶與風電場碰撞概率。
船舶位置、船舶航向一般服從一個特定分布,可通過實地調研獲取。環境因素如風況、流況也遵從一定規律,可從氣象網站上獲得。在獲得船舶特征、環境特征的分布函數之后,分別產生船舶位置、航向、主機狀態等特征以及風況、流況的隨機數。據此,結合其他相關參數可求得船舶與風電場的碰撞概率。
2 船舶與風電場碰撞概率影響因子分析
通過計算在不同條件下船舶與風電場碰撞概率,分析碰撞概率隨各因子的變化趨勢,探究船舶與風電場碰撞概率的一般規律,是基于可接受碰撞概率界定航路與風電場安全距離的基礎。
整機測試儀通過裝置電源把座上的閉環測試連接線,實時檢測裝置閉鎖接點復位信號。當裝置上電后,裝置閉鎖信號會從閉合到斷開,表明裝置已處于正常運行狀態,可以進行整機測試。WDT將裝置正常運行信號反饋給ITCC,有其根據信號來源,觸發左側或右側測試系統的掃描儀。掃描儀掃描裝置側面的機箱條碼,并將條碼信息提交給大數據服務支撐模塊。大數據服務支撐模塊根據裝置條碼獲取裝置硬件板卡等多維度數據,智能測試控制中心根據該數據控制對應氣閥,完成該型號裝置測試連接線的自動連接,為整機智能測試構建閉環測試環境。
2.1 試驗參數確定
本文以莆田轄區擬建的海上風電場E區為試驗對象,通過多組模擬試驗驗證所提出的計算方法。試驗中一些因子的取值見表1,風玫瑰圖見圖2。
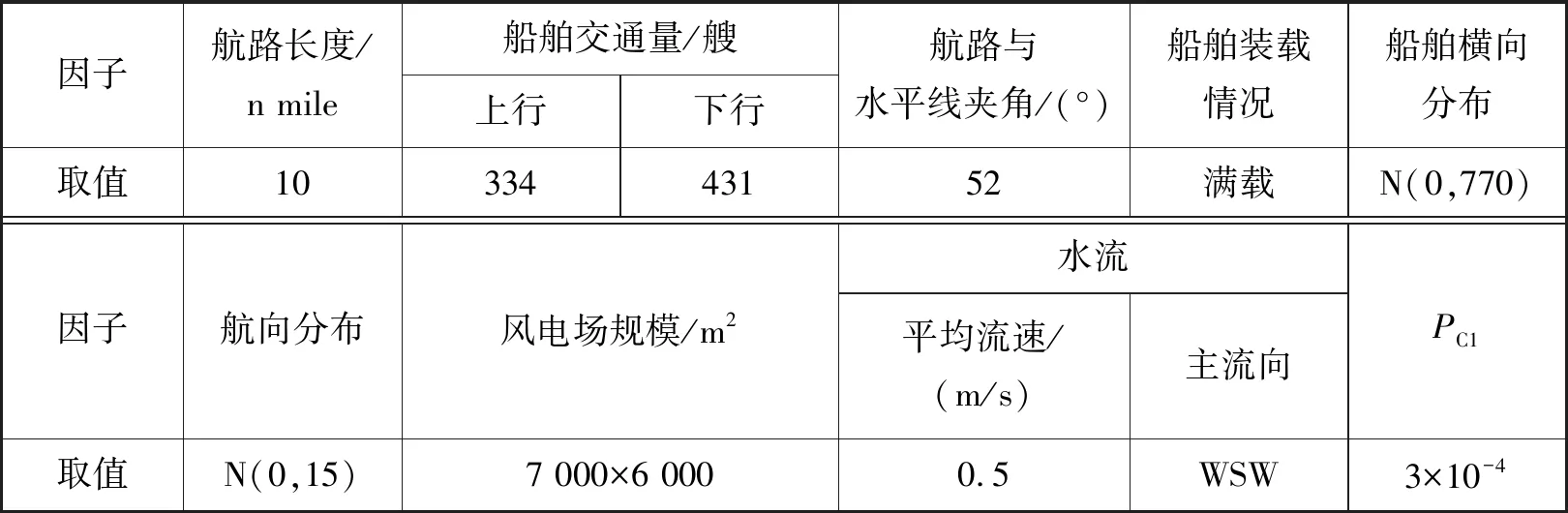
表1 參數取值
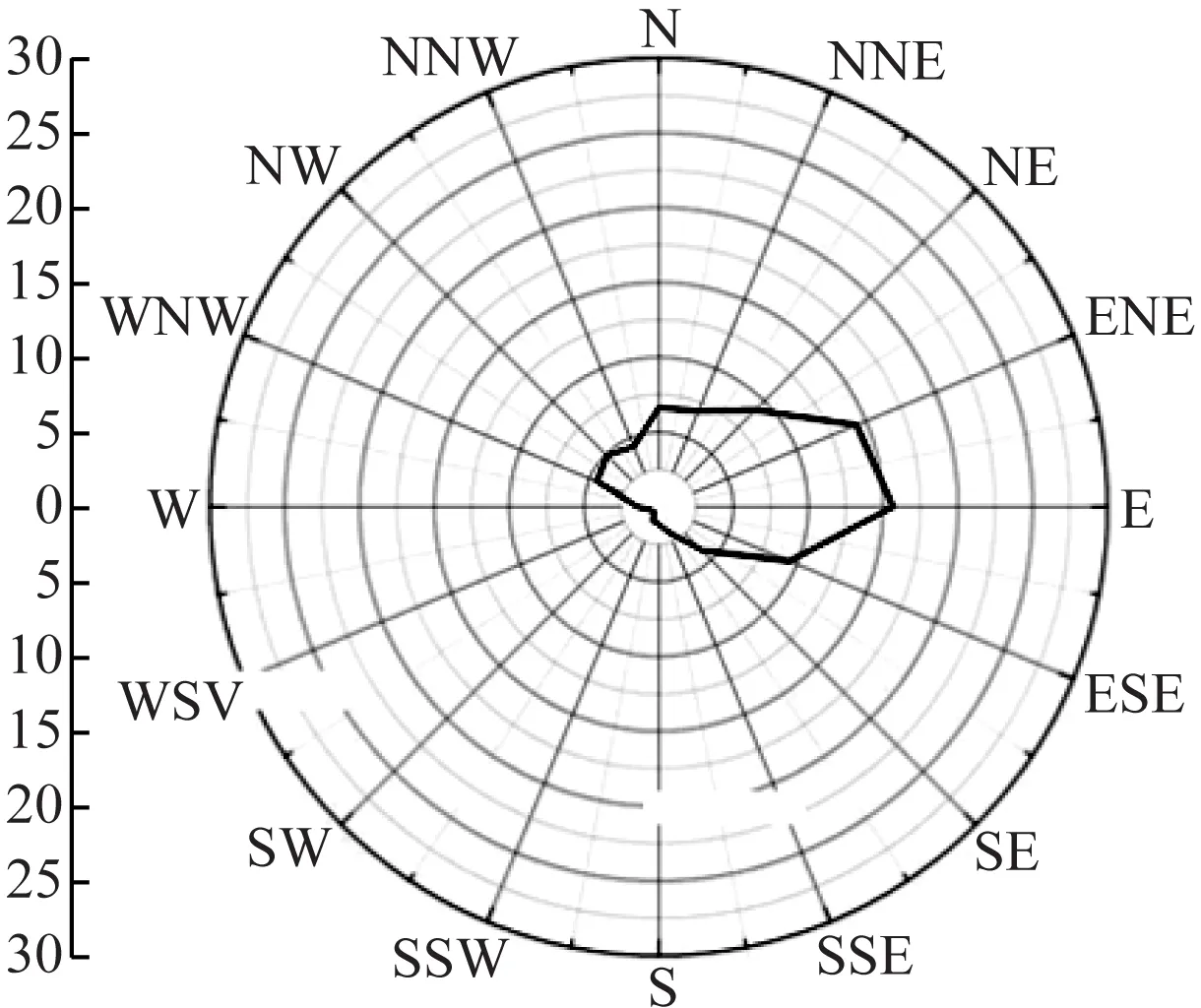
圖2 風玫瑰圖
根據概率模型分析可知:P與諸多因素有關。為從船舶和風電場特征兩方面分析P,在梳理P的主要影響因素之后,選取v(船舶平均速度)、M和Lf作為主要參數,深入探索P隨主要影響參數的變化規律。根據對風電場E區水域的船舶交通流統計可知:船舶速度通常在6~13 kn,船舶以中小型船舶為主,船舶載重量一般低于2萬t。此外,風電場E區靠近航路一側的邊界線長度約為7 000 m。基于以上實際數據,對試驗參數進行假設,設計3組試驗方案見表2。
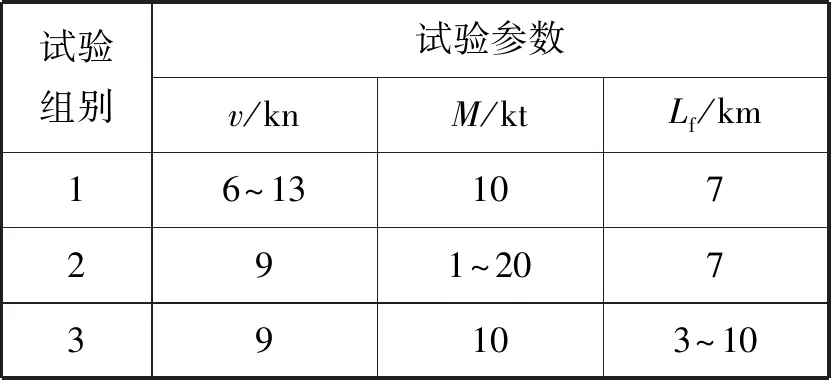
表2 試驗設計
2.2 試驗結果分析
2.2.1P隨v的變化
P隨v的變化趨勢見圖3。當M和Lf一定時,若設定某一風電場與航路距離,P隨v的增大而減小;當風電場與航路距離d<4 200 m時,v取不同取值時對應的P值之間的差異較為明顯,隨著d的增加,這種差異也隨之縮小。
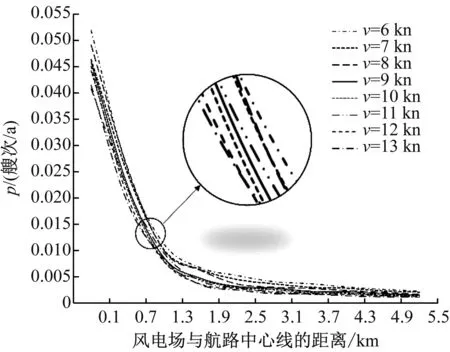
圖3 P隨v的變化
2.2.2P隨M的變化
P隨M的變化趨勢見圖4。當v和Lf一定時,若設定某一風電場與航路距離,P基本隨M的增大而減小。當d<1 000 m或900 m
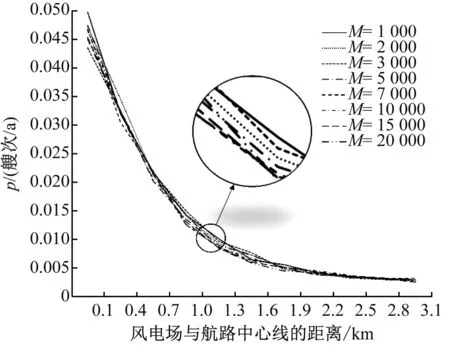
圖4 P隨M的變化
2.2.3P隨Lf的變化
P隨Lf的變化趨勢見圖5。當v和M一定時,若設定某一風電場與航路距離,P隨Lf的增大而增大。當900 m
2.3 試驗結論
在以上參數的設置下,得出P的最大值約為0.049艘次/a。在其他參數不變時,P隨船舶平均速度的增大而增大,且幅度明顯,而隨船舶載重噸和風電場邊界線長度的變化不明顯。
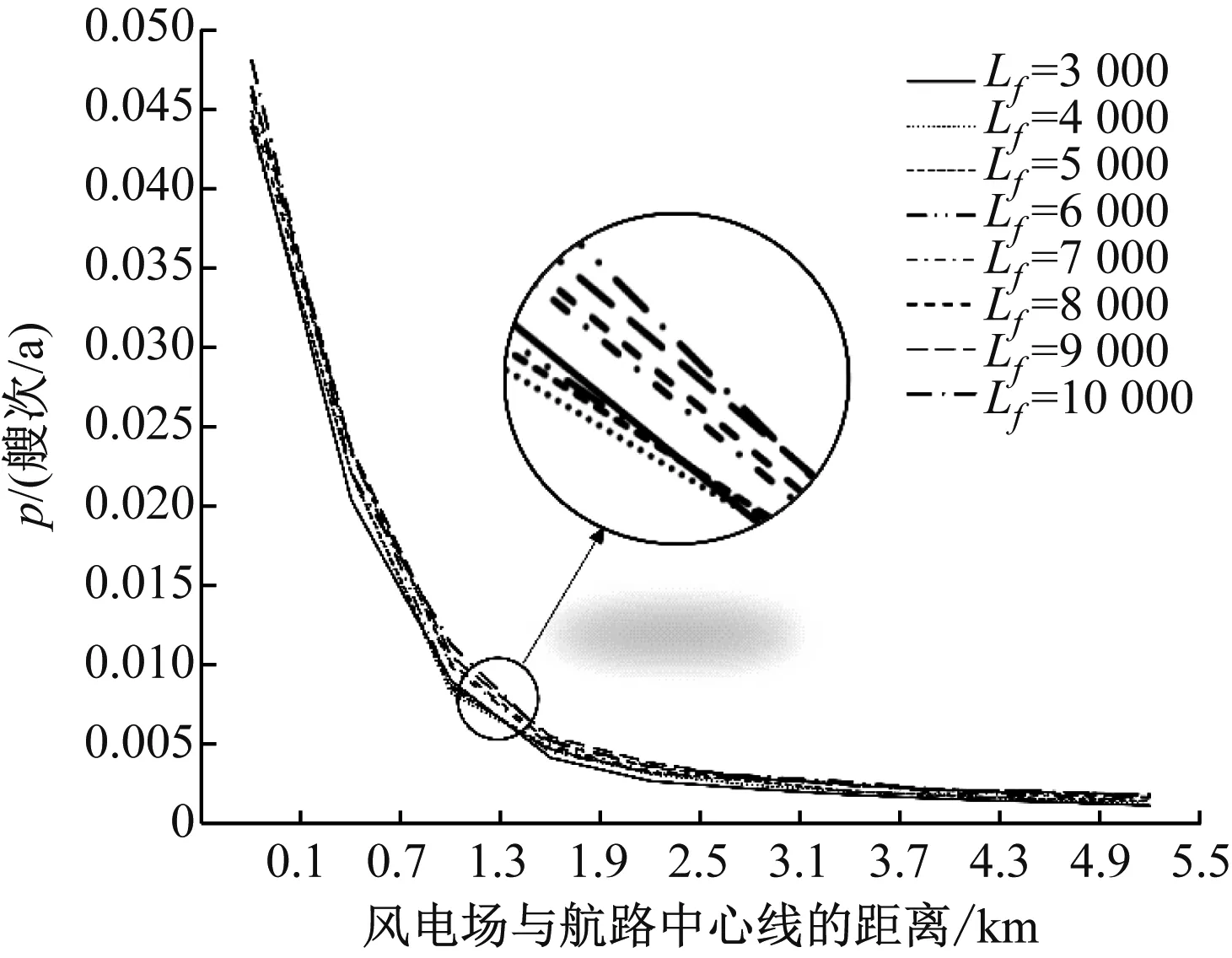
圖5P隨Lf的變化
3 海上風電場與航路安全距離界定
根據試驗結果可知:船舶和風電場碰撞概率與航路和風電場距離密切相關。為保障風電場水域船舶航行安全,可通過控制航路與風電場距離,達到降低船舶與風電場碰撞概率的目的。
本文借鑒德國在海上設施碰撞風險研究中的可接受風險標準[16],將航路中船舶與海上風電場發生碰撞事故的可接受概率設定為0.006 7艘次/a。據此,計算出滿足年平均碰撞概率小于0.006 7艘次時的風電場與航路距離,將其作為安全距離。
在參數設置下,當v、M、Lf取不同值時,風電場與航路安全距離變化趨勢見圖6。當M、Lf一定時,安全距離隨v的增大而減小;當v<8 kn時,安全距離會發生明顯波動;當v>8 kn時,安全距離的變化較為平順。當M、v一定時,安全距離基本上隨Lf的增加而增大;當v、Lf一定時,隨著M的增大,安全距離逐漸減小。安全距離隨v、M、Lf的變化趨勢與P的變化規律相對應,在3個參數中,安全距離隨v的變化最大,而隨Lf的變化最小,說明雖然縮小風電場邊界線長度能夠降低船舶與風電場碰撞的概率,從而降低對于風電場與航路的安全距離的要求,但成效不大,建議適當提高附近船舶平均速度。
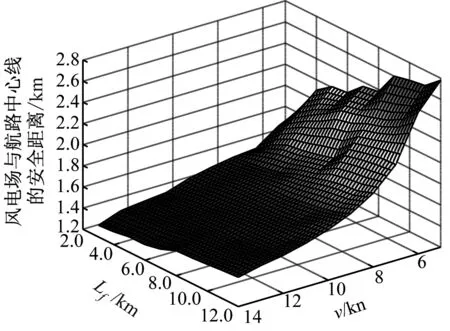
a) M=1 000 t

b) M=5 000 t
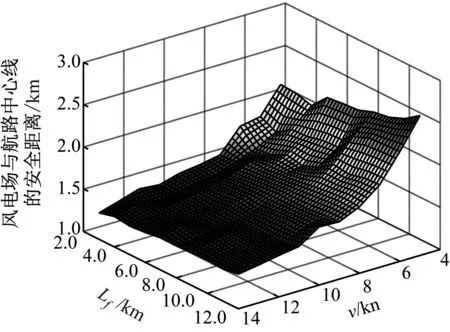
c) M=10 000 t
圖6 風電場與航路安全距離變化曲面圖
在參數設置下,風電場與航路的安全距離在1 300~3 000 m。相對于英國海事與海岸警衛署提出的安全距離范圍[1],本文得出的安全距離閾值更小,在確保船舶通航安全水平滿足行業標準的情況下,所提出的安全距離模型能夠更好地優化海域資源配置,同時,能夠減小對原船舶交通流的壓縮及通航環境的改變,在一定程度上將減少海上風電場建設對船舶通航安全的影響。
4 結束語
在分析船舶與海上風電場碰撞過程的基礎上,考慮船舶類型、位置、速度、風和流等因素的影響,建立基于蒙特卡洛仿真的船舶與風電場碰撞概率模型,分析船舶與風電場碰撞概率的分布特征。隨后,剖析碰撞概率與風電場和航路的距離之間的相互關系,確定碰撞概率的可接受程度,據此獲取風電場與航路的可接受安全距離范圍,從而提出一種定量計算海上風電場與航路安全距離的方法。研究結果表明:船舶平均速度越小,船舶載重噸越小,風電場邊界線長度越大,風電場與航路的安全距離閾值也越高,特別是當v<8 kn時,安全距離閾值將大幅度提高。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30