5萬噸級半潛船航行耐波性
2019-02-24 05:00:44陳曉明蔡連財
中國航海 2019年4期
關(guān)鍵詞:船舶
劉 旭, 陳曉明, 蔡連財
(1.中遠海運特種運輸股份有限公司, 廣州 510623; 2.中國船舶重工集團國際工程有限公司, 北京 100024 )
半潛船主要通過一系列下潛、上浮操作或碼頭滾裝的方式來裝卸和運輸不可分割的超大型設(shè)備[1-2],是重要的新型海洋工程特種運輸船型,目前最大載重噸已發(fā)展到11萬t,承運的單件貨物最大重量也達到6.4萬t。半潛船船寬與船長、型深、吃水的比值明顯大于常規(guī)運輸船。半潛船運輸?shù)奶卮笮驮O(shè)備和海洋平臺類別繁雜,每次航行過程中貨物的綁扎狀態(tài)都相差較大,船舶運動響應(yīng)變化也較大,稍有不慎,很容易引起貨物移動、傾倒,甚至引發(fā)全船舶傾覆等安全事故。[3-4]在航運過程中,為確保航行安全,半潛船每一次運載特大件貨物時均需要針對具體的運載狀態(tài)進行耐波性分析,并依據(jù)計算結(jié)果進行牢固綁扎。因此,全面掌握半潛船在不同運載航行狀態(tài)下的水動力特性和耐波性規(guī)律是非常有必要的。
作為一種高技術(shù)高附加值的特種船型,半潛船設(shè)計難度很大,2006年之前僅有荷蘭具備完整的建造設(shè)計能力,近些年,我國通過引進吸收的方式也逐漸具備一定的設(shè)計能力,但仍與世界先進水平存在巨大差距。迄今為止半潛船還沒有統(tǒng)一的技術(shù)要求,國內(nèi)外半潛船的關(guān)鍵技術(shù)資料、研究報告和文獻資料極少,針對半潛船耐波性的研究數(shù)量更少,白鑫等[5]、楊索賢等[6]分別利用HydroStar軟件預(yù)報半潛船的波浪載荷,得出規(guī)范公式無法對波浪載荷做出合理的評估而采用直接算法較為合理的結(jié)論。莫瑞芳等[7]利用Sesam/PatranPre軟件進行零航速耐波性分析,研究浪向?qū)Υ故帯M搖的響應(yīng)規(guī)律。目前,公開的文獻缺少半潛船耐波性試驗分析及數(shù)值模擬與試驗的對比分析等方面的研究,不利于半潛船技術(shù)的發(fā)展。
基于此,本文以5萬噸級半潛船為研究對象,開展模型試驗和實船試驗、數(shù)值模擬方法在半潛船耐波性分析領(lǐng)域的應(yīng)用研究,且通過對比分析探討半潛船航行狀態(tài)下的水動力規(guī)律,為同類型半潛船耐波性分析提供有益參考。
1 耐波性試驗
半潛船耐波性試驗方法包括模型試驗和實船試驗。耐波性模型試驗主要包括靜水試驗、規(guī)則波試驗、不規(guī)則波試驗和瞬態(tài)波試驗。[8]其中,不規(guī)則波模型試驗主要通過船舶模型在不規(guī)則波中的運動響應(yīng)試驗,以確定船體在不同狀態(tài)下各種頻率響應(yīng)函數(shù)及加速度等。耐波性實船試驗項目包括船舶運動響應(yīng)及垂向加速度等測試。[9]不規(guī)則波模型試驗和實船試驗?zāi)茌^真實地反映天然海浪作用下的船舶運動規(guī)律,前者是船舶設(shè)計期間確定船舶耐波性的重要依據(jù),后者是評價和檢驗船舶耐波性優(yōu)劣的最終依據(jù)。本文分別考慮了半潛船的這兩種試驗情況。
1.1 試驗參數(shù)和試驗條件
為得到半潛船準確的水動力特性,給后續(xù)綁扎設(shè)計提供依據(jù),需要開展半潛船的耐波性試驗研究。目標船型為我國開發(fā)的某5萬噸級半潛船,目標船型的實際尺寸參數(shù)和試驗條件見表1。
耐波性模型試驗在荷蘭MARIN水池進行,采用先進的搖板式多單元造波系統(tǒng)及消波系統(tǒng)。根據(jù)船舶與海洋工程模型試驗原理和相關(guān)規(guī)范[8,10],模型試驗?zāi)P涂s尺比取1∶49.5,見圖1。

圖1 5萬噸級半潛船模型
表1 半潛船模型參數(shù)
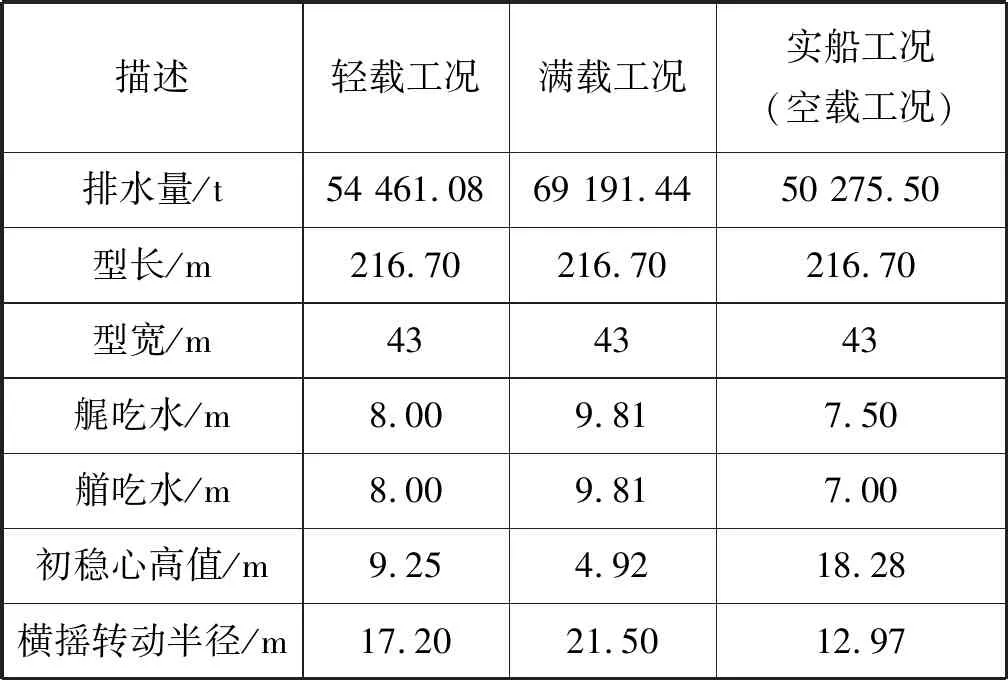
描述輕載工況滿載工況實船工況(空載工況)排水量/t54 461.0869 191.4450 275.50型長/m216.70216.70216.70型寬/m434343艉吃水/m8.009.817.50艏吃水/m8.009.817.00初穩(wěn)心高值/m9.254.9218.28橫搖轉(zhuǎn)動半徑/m17.2021.5012.97
1.2 不規(guī)則波試驗方法分析
(1)
不規(guī)則波試驗的RAO主要通過不規(guī)則波試驗獲得半潛船在白噪聲波譜中的運動響應(yīng),應(yīng)用譜分析技術(shù)將相應(yīng)的時域信號進行傅里葉變換,得到頻域響應(yīng),再進行平滑處理,最終計算得出船舶在不同浪向角下各自由度的RAO。
2 數(shù)值模擬
2.1 水動力分析數(shù)值方法
水動力分析數(shù)值方法是船舶耐波性分析的基本技術(shù)手段。與之前的研究僅數(shù)值模擬不同[5-7],本文將三維繞輻射勢流理論的OCTOPUS計算程序?qū)Π霛摯哪筒ㄐ灶A(yù)報結(jié)果與模型試驗和實船試驗結(jié)果進行對比分析,以此驗證數(shù)值模擬方法的合理性。在計算過程中,流場的求解基于頻域格林函數(shù)邊界元法進行,一階問題采用基于Korvin源勢法,二階采用Molin法。OCTOPUS水動力數(shù)值方法具體的實現(xiàn)原理見圖2。
實際海況是不規(guī)則且隨機的,譜分析法可給出特定不規(guī)則波海況下船體的運動響應(yīng)。[11]本文計算采用JONSWAP 波浪譜,其定義為
(2)
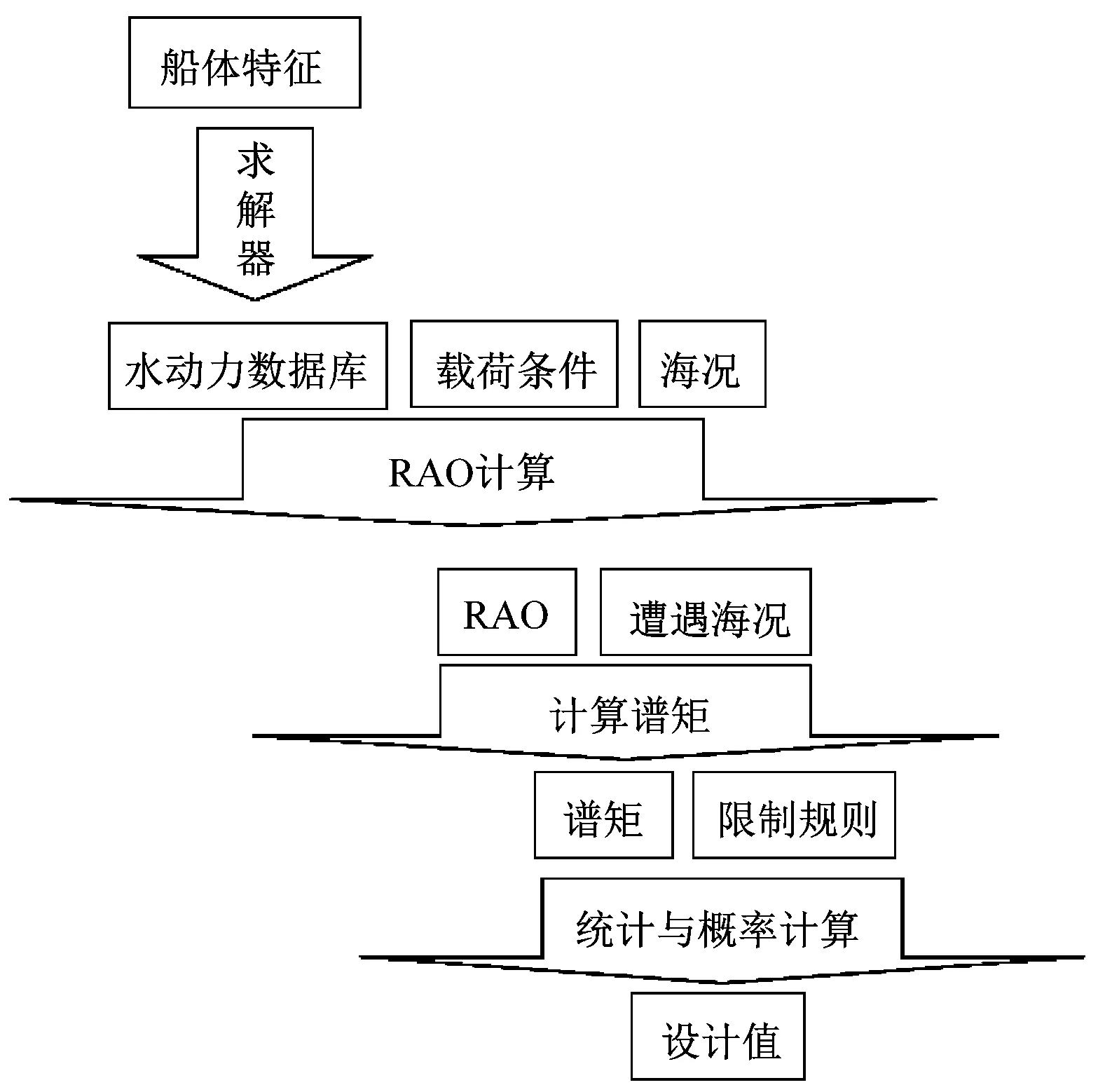
圖2 OCTOPUS水動力數(shù)值方法具體的實現(xiàn)原理
航行船舶的響應(yīng)譜的譜矩可表達為
(3)
式(3)中:Sζ(ω)為海浪譜密度函數(shù);ω為波浪圓頻率。
2.2 計算模型
水動力計算模型包括濕表面模型和質(zhì)量模型。濕表面模型是基于半潛船的肋骨型線圖中的50個典型肋位,其中:艉部1/4船長包含15個剖面;艏部1/4船長包含15個剖面;舯部包含20個剖面。為保證計算精度,計算區(qū)域長度和寬度方向均實取船寬的5倍。船體的網(wǎng)格沿船長方向約55個,船寬方向約20個,在型線變化比較大的地方網(wǎng)格密度適當加大,四周自由液面的網(wǎng)格與船體網(wǎng)格相匹配。船體水動力計算模型見圖3。
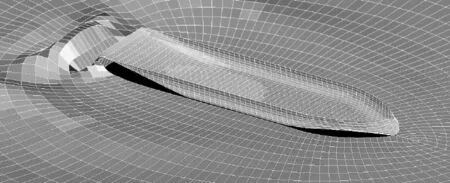
圖3 半潛船水動力計算模型
3 模型與實船試驗工況及結(jié)果分析
3.1 不規(guī)則波模型試驗與實船試驗工況
為完整考察半潛船的航行耐波性特性,分別測試以下典型工況。其中,定義從艉部方向傳來波浪入射角為 0°,艏部方向傳來波浪入射角為180°。
1) 輕載工況1(吃水=8 m),Hs=6.50 m,Tp=9.00 s,浪向90°/180°,航速10 kn。
2) 輕載工況2(吃水=8 m),Hs=6.50 m,Tp=12.50 s,浪向為90°/180°,航速為10 kn。
3) 滿載工況1(吃水=9.81 m),Hs=6.50 m,Tp=9.00 s,浪向為90°/180°,航速為10 kn。
4) 滿載工況2(吃水=9.81 m),Hs=6.50 m,Tp=12.50 s,浪向為90°/180°,航速為10 kn。
5) 實船工況(吃水=9.0 m),Hs=1.5~4.0 m,Tp=10~12 s,浪向為-35°/-45°/-60°,航速為9.0~11.8 kn。
3.2 模型試驗橫搖和垂蕩運動分析
半潛船模型試驗的橫搖、垂蕩運動情況見圖4、圖5、圖6和圖7。
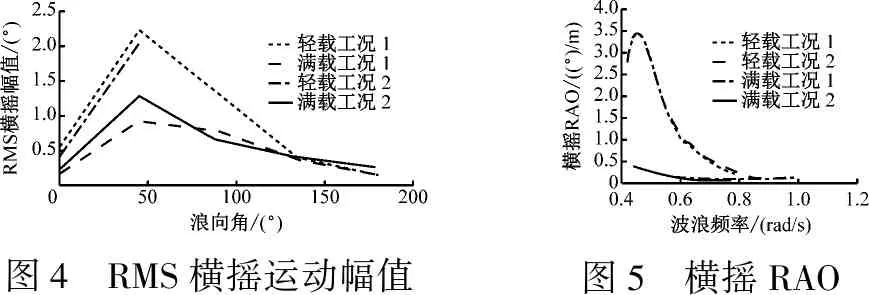
圖4 RMS橫搖運動幅值圖5 橫搖RAO
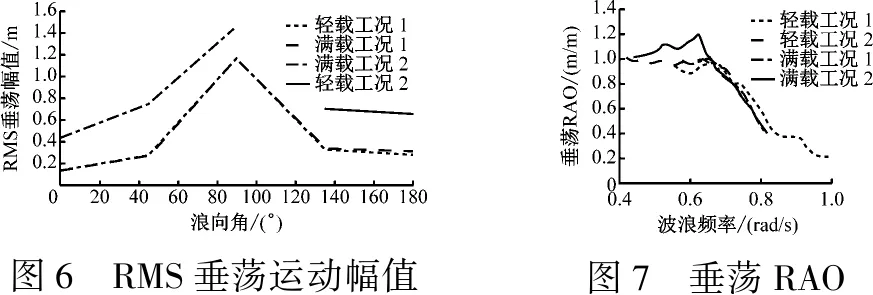
圖6 RMS垂蕩運動幅值圖7 垂蕩RAO
由圖4與圖5可知:
1) 在尾斜浪和橫浪之間區(qū)域的海況下,由于波浪的遭遇頻率接近于橫搖運動自然周期,船舶處于共振區(qū),因此半潛船的橫搖激勵最大,橫搖響應(yīng)最為劇烈。這與之前的結(jié)論是一致的。[9]
2) 橫搖運動對裝載狀態(tài)非常敏感,在輕載工況下船舶的最大橫搖角幅值遠大于滿載工況,主要原因是該裝載工況下船舶固有周期13.6 s更加接近波浪遭遇周期。
由圖6和圖7可知:
1) 在橫浪的海況下,半潛船的垂蕩運動響應(yīng)最大,其中滿載工況垂蕩RAO達到1.18,較為危險,其他浪向垂蕩性能相對較好。
2) 在滿載工況下垂蕩運動大于輕載工況。顯然裝載狀態(tài)對垂蕩運動存在一定影響。
3) 在小于0.7 rad/s波浪頻率范圍內(nèi),垂蕩受波浪高度影響較大,對波浪遭遇周期不太敏感。
3.3 試驗與數(shù)值模擬的結(jié)果對比
3.3.1自然橫搖周期對比
模型試驗與數(shù)值模擬的自然橫搖周期差異非常小,自然橫搖周期對比見表2。在3%以內(nèi)。該差異是船舶的尺度效應(yīng)所致,因此可忽略。

表2 自然橫搖周期對比 s
3.3.2運動響應(yīng)傳遞函數(shù)對比
半潛船不規(guī)則波縱搖RAO的模型試驗結(jié)果和OCTOPUS預(yù)報結(jié)果比較見圖8。由圖8可知:
1) 半潛船縱搖對裝載狀況不太敏感。
2) OCTOPUS預(yù)報結(jié)果非常接近于在模型試驗中測量到的縱搖RAO,故本文采用的數(shù)值方法可行,計算結(jié)果的精確度較好。
3) 半潛船模型試驗成本較高,且試驗數(shù)據(jù)非常有限,難于完整描述半潛船耐波性規(guī)律,尤其在高頻和低頻區(qū)間。OCTOPUS則可給出相對準確的縱搖RAO高頻和低頻計算結(jié)果,有助于實際工程應(yīng)用。
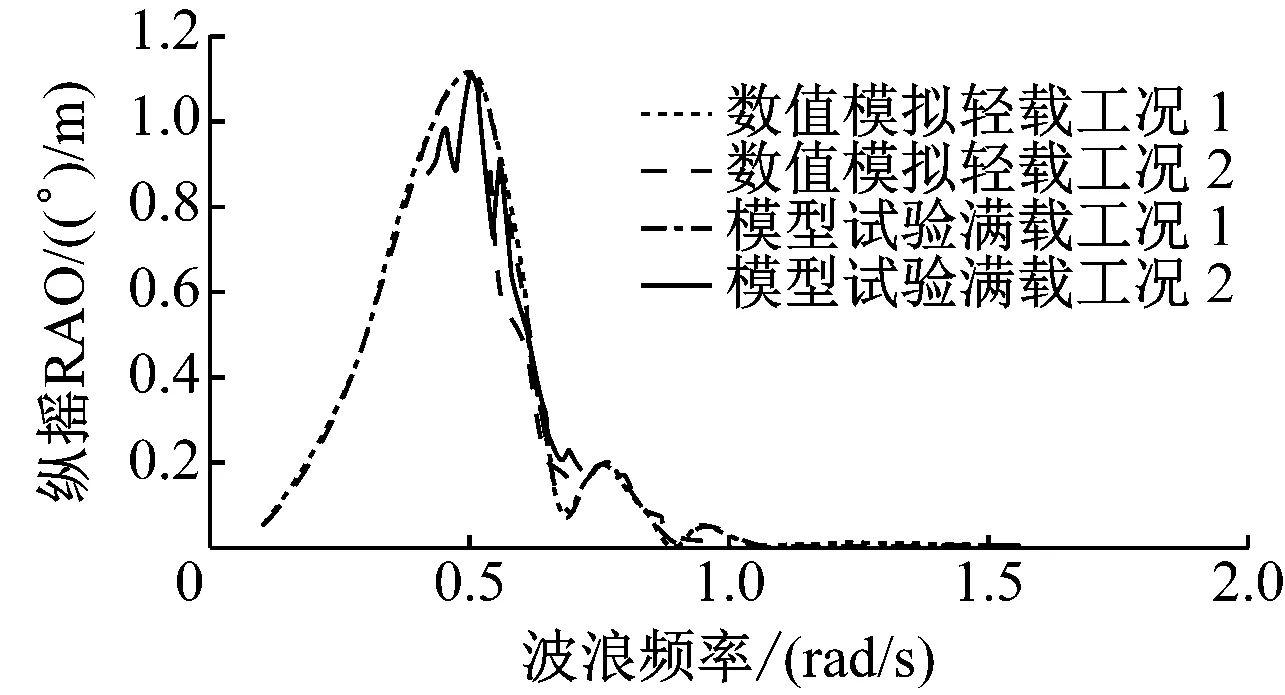
圖8 縱搖RAO模型試驗結(jié)果和OCTOPUS預(yù)報結(jié)果
3.3.3加速度預(yù)報對比
為進一步驗證在不同工況下船舶運動響應(yīng)的預(yù)報精度,選擇半潛船駕駛臺和主甲板上2個參考點進行觀測,坐標分別為駕駛臺:X=198.40 m,Y=0.00 m,Z=42 m;主甲板:X=0.00 m,Y=21.50 m,Z=13.00 m;圖9~圖12分別給出了輕載工況(吃水=8 m),Hs=6.50 m,Tp=12.50 s在不同浪向情況下的駕駛臺和主甲板參考點數(shù)值模擬和模型試驗的垂向加速度和橫向加速度值對比結(jié)果,見圖9~圖12。
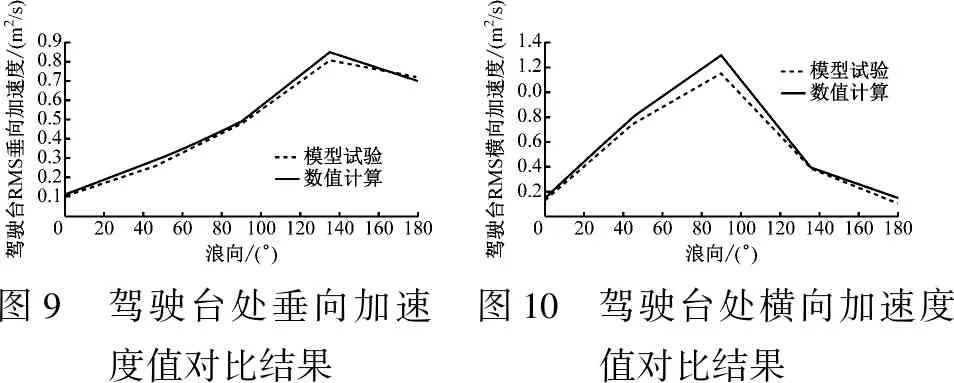
圖9 駕駛臺處垂向加速度值對比結(jié)果圖10 駕駛臺處橫向加速度值對比結(jié)果

圖11 主甲板處垂向加速度值對比結(jié)果圖12 主甲板處橫向加速度值對比結(jié)果
由圖9~圖12可知:駕駛臺和主甲板參考點的垂向加速度和橫向加速度值數(shù)值計算曲線與模型試驗曲線的趨勢基本吻合,數(shù)值模擬結(jié)果略為保守:在頂浪和艏斜浪的海況下,駕駛臺和主甲板處垂向加速度下相對較大,表明縱搖運動起著重要的作用,垂向加速度和浪向有關(guān);在艉斜浪和橫浪的海況下,駕駛臺處橫向加速度最大,橫向加速度同時受浪向和所處位置的影響。半潛船在實際綁扎分析時需要全面考慮加速度處于最不利的情況。
3.3.4實船試驗與數(shù)值模擬橫搖運動對比分析
對在某海域?qū)嶋H營運中的半潛船進行實船耐波性試驗, 實測該船航行過程中的橫搖運動特性,并與OCTOPUS數(shù)值模擬結(jié)果進行對比,從而檢驗數(shù)值模擬方法的可靠性和實用性。兩者對比結(jié)果見圖13。
由圖13可知:實船試驗的橫搖RAO值與數(shù)值模擬在同等海況下的計算值是比較接近和吻合的,數(shù)值模擬結(jié)果具有較高的準確性,可用于實船耐波性預(yù)報。但兩者也存在一定差別,主要原因是試驗時的海洋環(huán)境條件存在一定的不確定因素,而數(shù)值模擬的數(shù)學(xué)模型基于一定假設(shè)條件,無法完全真實模擬實際海況。在實際工程應(yīng)用中,數(shù)值模擬應(yīng)考慮一定安全裕度。
4 結(jié)束語
本文結(jié)合實例分析,利用試驗方法和數(shù)值模擬方法研究某5萬噸級半潛船的耐波性,得出以下結(jié)論,可對同類型半潛船的開發(fā)設(shè)計提供一定的參考:
1) 半潛船橫向加速度與浪向、所處半潛船垂向位置相關(guān)。半潛船垂向加速度則與浪向相關(guān)。
2) 半潛船橫搖、垂向和縱搖運動響應(yīng)與裝載狀態(tài)和浪向相關(guān)。在輕載工況下的船舶橫搖自然周期接近于一般航行海域的波浪遭遇周期,半潛船最大橫搖角發(fā)生在輕載艉斜浪工況;半潛船最大垂蕩運動發(fā)生在滿載橫浪工況。這證明在大風(fēng)浪運載航行的情況下,半潛船應(yīng)該盡可能避免頂浪和橫浪航行,
根據(jù)實際營運經(jīng)驗,盡可能保持船舶與浪向在20°夾角的情況下航行。
3) OCTOPUS數(shù)值模擬結(jié)果的分布規(guī)律與模型試驗、實船試驗相符合,且能夠提供更為完整的預(yù)報結(jié)果,說明數(shù)值模擬方法對于計算半潛船耐波性是一種有效的工具,可作為半潛船的貨物綁扎分析主要技術(shù)手段。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:08:26
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
機械工業(yè)標準化與質(zhì)量(2022年6期)2022-08-12 02:07:42
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30