一種球形電動(dòng)機(jī)轉(zhuǎn)子三自由度位置檢測方法研究
2019-02-25 10:17:02李雪逸王群京李國麗過希文鞠魯峰
微特電機(jī) 2019年2期
關(guān)鍵詞:檢測
李雪逸,王群京,錢 喆,李國麗,過希文,鞠魯峰,周 睿
(安徽大學(xué),合肥 230601)
0 引 言
近年來,隨著科技水平的進(jìn)步,越來越需要實(shí)現(xiàn)多自由度運(yùn)動(dòng),如擬人運(yùn)動(dòng)中的關(guān)節(jié)運(yùn)動(dòng)和視覺運(yùn)動(dòng)。球形電動(dòng)機(jī)概念的提出和研究旨在更好地滿足多自由度驅(qū)動(dòng)裝置的需求,減少由單個(gè)自由度系統(tǒng)和其他裝置組成的多自由度運(yùn)動(dòng)系統(tǒng)所帶來的諸如能耗大、效率低等實(shí)際問題。與傳統(tǒng)多自由度傳動(dòng)機(jī)構(gòu)相比,球形電動(dòng)機(jī)擁有摩擦力小、結(jié)構(gòu)更加簡單、體積更小等優(yōu)勢(shì),有很高的研究價(jià)值。
盡管球形電動(dòng)機(jī)類型、原理、控制策略各不相同,但是依然需要更加高效的位置檢測環(huán)節(jié)以輔助電機(jī)的控制。然而,普通電機(jī)常見的位置檢測策略卻很難適用于有球形電動(dòng)機(jī)的場合。
目前,國內(nèi)外同樣也已經(jīng)提出了多種球形電動(dòng)機(jī)的位置檢測方法,它們的原理、使用的儀器各不相同。其中具有代表性的方法包括滑軌支架測量系統(tǒng)、利用光電/雙光學(xué)傳感器的轉(zhuǎn)子位置檢測方法、機(jī)器視覺的方法、利用霍爾效應(yīng)傳感器和神經(jīng)網(wǎng)絡(luò)的方法[1-2]等,它們存在顯著的優(yōu)點(diǎn)和缺陷[3]。
本文研究了永磁球形電動(dòng)機(jī)轉(zhuǎn)子的三自由度位置檢測策略,通過三維磁感應(yīng)強(qiáng)度傳感器采集的數(shù)據(jù)來測量球形電動(dòng)機(jī)轉(zhuǎn)子包括空間和自旋的三自由度位置,進(jìn)行了仿真驗(yàn)證并搭建了實(shí)驗(yàn)平臺(tái),并進(jìn)一步對(duì)可能影響實(shí)驗(yàn)結(jié)果的誤差進(jìn)行了全面的分析。
1 永磁球形電動(dòng)機(jī)基本結(jié)構(gòu)及運(yùn)行原理
本文使用的永磁球形電動(dòng)機(jī)結(jié)構(gòu)的具體參數(shù)如下:定子半徑(殼內(nèi)/外)為100 mm/117 mm;轉(zhuǎn)子直徑為112 mm;永磁極個(gè)數(shù)為8;圓柱永磁極直徑和高度均為20 mm;線圈個(gè)數(shù)為24/2層;線圈匝數(shù)為1 600;最大傾斜角度為±15°。
定子線圈產(chǎn)生磁場。在球形電動(dòng)機(jī)的控制中,按照通電策略能為轉(zhuǎn)子磁極帶來力矩,推動(dòng)轉(zhuǎn)子自旋和產(chǎn)生角位移。通過位置檢測環(huán)節(jié)將轉(zhuǎn)子的位置實(shí)時(shí)反饋。
2 基于三維磁場的位置檢測方法
單個(gè)軸向充磁的圓柱形永磁體周圍任意空間位置的磁感應(yīng)強(qiáng)度矢量具有唯一性,根據(jù)某磁感應(yīng)強(qiáng)度矢量能推算出該位置對(duì)應(yīng)的永磁體附近的位置。將永磁體固定在轉(zhuǎn)軸上,它周圍的磁場跟隨轉(zhuǎn)軸運(yùn)動(dòng)且具有實(shí)時(shí)性。三維磁感應(yīng)強(qiáng)度傳感器能夠采集到磁感應(yīng)強(qiáng)度的正交分量。利用其采集到的磁感應(yīng)強(qiáng)度分量解算出轉(zhuǎn)子的三自由度位置[4-6]。檢測系統(tǒng)示意圖如圖1所示。
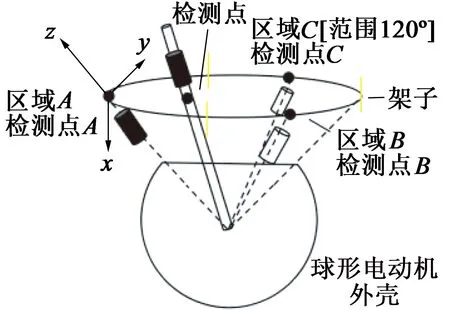
圖1 檢測系統(tǒng)示意圖
文獻(xiàn)[7]中采用的是氣隙磁場,由于永磁球形電動(dòng)機(jī)氣隙磁場空間有限,距離線圈和轉(zhuǎn)子磁極太近,易受影響。單從氣隙磁場解構(gòu)轉(zhuǎn)子位置尤其困難。本文對(duì)文獻(xiàn)[7]的方法進(jìn)行改進(jìn),不使用電機(jī)氣隙磁場,而是在球形電動(dòng)機(jī)外部進(jìn)行數(shù)據(jù)的采集和位置信息的解構(gòu)。此外,該文獻(xiàn)僅提出了求解球形電動(dòng)機(jī)轉(zhuǎn)子二自由度位置的算法,本文將對(duì)第三個(gè)自由度,即轉(zhuǎn)子的角位移進(jìn)行進(jìn)一步的分析和解構(gòu)。
2.1 測量的基本原理
圖2描述了坐標(biāo)系中的兩個(gè)軸向充磁的圓柱永磁體和兩個(gè)檢測點(diǎn)的相對(duì)位置。永磁體1和永磁體2的中心點(diǎn)分別為Pm和Pw,N極朝向所在軸的正方向,S極朝向所在軸的負(fù)方向。它們與絕對(duì)坐標(biāo)系X,Y,Z的坐標(biāo)原點(diǎn)直線距離分別為Lm和Lw。檢測點(diǎn)1,2的中心點(diǎn)分別為Ps和Ph。
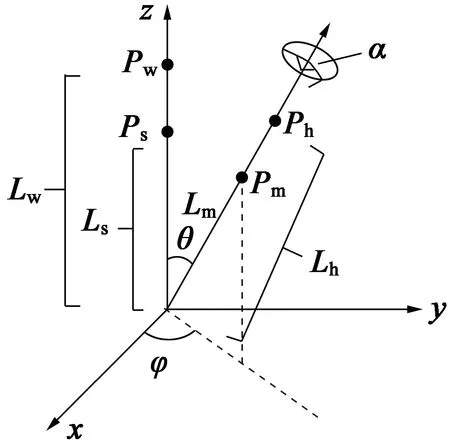
圖2 描述永磁體和檢測點(diǎn)相對(duì)位置的絕對(duì)坐標(biāo)系
P點(diǎn)在絕對(duì)坐標(biāo)系上的坐標(biāo)P(x,y,z)可以描述如下:
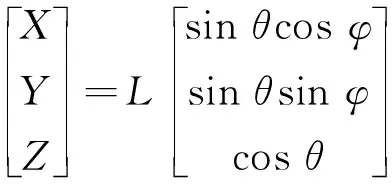
(1)
式中:L為OP距離。顯然,通過φ,θ可以得到P點(diǎn)的坐標(biāo)且該坐標(biāo)具有唯一性。
本文位置檢測的基本思路描述如下:通過φ和θ解算出轉(zhuǎn)子的空間二自由度位置,再由永磁體2與檢測點(diǎn)2之間的關(guān)系,確定轉(zhuǎn)子的自旋位置。
本文需要在檢測點(diǎn)放置三維磁感應(yīng)強(qiáng)度傳感器。將一個(gè)傳感器和一個(gè)永磁體固定,作為一組,置于相對(duì)坐標(biāo)系為xi,yi,zi的Z軸上S處。第一組置于A區(qū)域內(nèi),i=1;第二組置于B區(qū)域內(nèi),i=2;第三組置于C區(qū)域內(nèi),i=3。置于三個(gè)區(qū)域的傳感器分別為SA,SB,SC。由絕對(duì)坐標(biāo)系獲得相對(duì)坐標(biāo)系的方法如下:將前者按照逆時(shí)針繞Z,X軸旋轉(zhuǎn)β,α角的次序以獲得后者。β=0°,β=120°,β=240°對(duì)應(yīng)相對(duì)坐標(biāo)系xi,yi,zi的i=1,2,3。
以A區(qū)域?yàn)槔T谠搮^(qū)域,通過SA檢測出的數(shù)據(jù)解算出轉(zhuǎn)軸上的P點(diǎn)在相對(duì)坐標(biāo)系中的空間位置P(x,y,z),經(jīng)過坐標(biāo)轉(zhuǎn)移變換,即得到轉(zhuǎn)子的二自由度位置。P(x,y,z)的計(jì)算方法:
式中:L為P點(diǎn)到原點(diǎn)距離,R為坐標(biāo)變換矩陣。
2.2 轉(zhuǎn)子空間位置解算與仿真分析
檢測點(diǎn)1位于絕對(duì)參考坐標(biāo)系Z軸上,其檢測出的磁感應(yīng)強(qiáng)度B的正交分量Bx,By,Bz方向與絕對(duì)參考坐標(biāo)系中的X,Y,Z軸正方向相同。圓柱形永磁體1,永磁體2在檢測點(diǎn)1處產(chǎn)生的磁感應(yīng)強(qiáng)度分別為B1s和B2s,得到:
(3)
在Ps點(diǎn)放置傳感器S,其測得的正交磁感應(yīng)強(qiáng)度分量分別為Bx,By,Bz。由于檢測點(diǎn)1和永磁體2相對(duì)位置不變,B2s能預(yù)先測得,從而推導(dǎo)出B1s。φ由下式求得:
(4)

(5)
式中:θk∈[0,θ0],Bk=f(θk),k=1,2,…,n-1。
在θ和φ確定后,無論轉(zhuǎn)軸如何自旋,永磁體2相對(duì)于檢測點(diǎn)1的位置均保持不變,可以忽略自旋的影響。
將絕對(duì)坐標(biāo)系按照沿Z,Y軸逆時(shí)針旋轉(zhuǎn)φ,θ角的次序形成相對(duì)坐標(biāo)系x1,y1,z1,使永磁體1位于坐標(biāo)系x1,y1,z1的(0,0,Ls)位置上。傳感器S記錄的永磁體1的位置信息如下:
得:
(6)
利用磁偶極子法,建立圓柱永磁體等效DMP模型,通過式(7)[8]計(jì)算B1x,B1y,B1z:
(7)
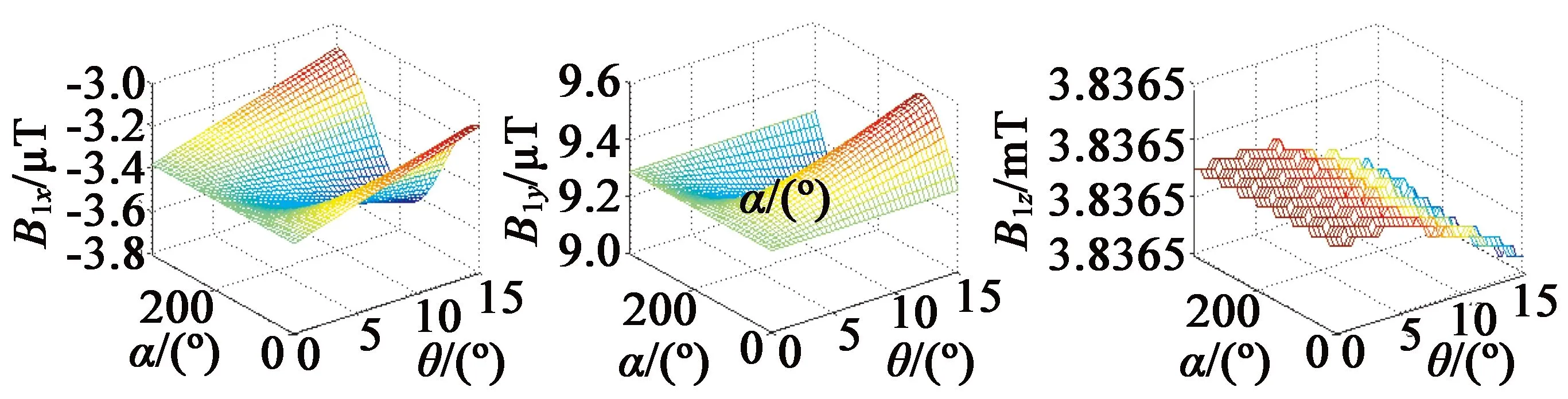
同樣以A區(qū)域?yàn)槔S来朋w和檢測點(diǎn)參數(shù)如表1和表2所示。當(dāng)永磁體在θ∈[0,π/9],φ∈[0,π]范圍內(nèi)時(shí),檢測點(diǎn)檢測到的磁感應(yīng)強(qiáng)度分量隨φ,θ的變化如圖3所示。
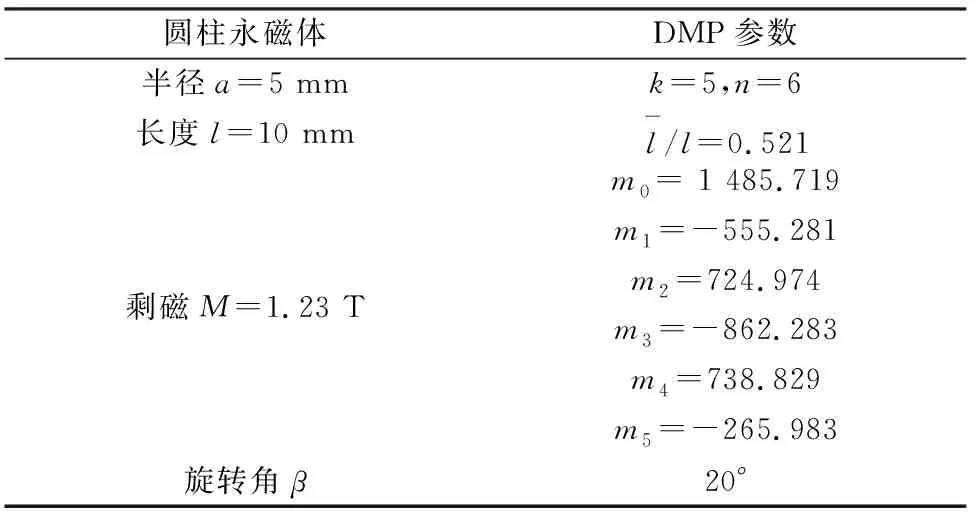
表1 磁源永磁體參數(shù)
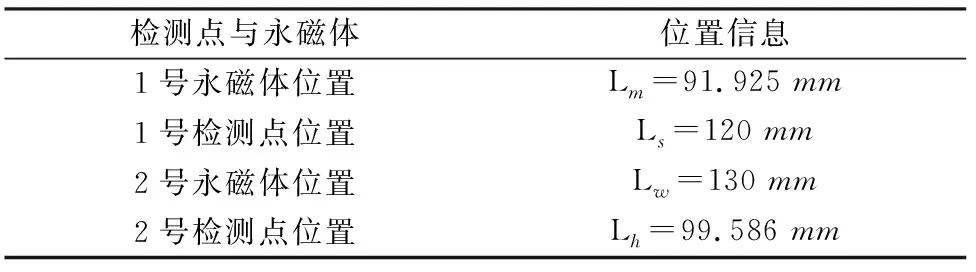
表2 檢測點(diǎn)與永磁體位置信息
(a) X方向 (b) Y方向 (c) Z方向
圖3隨φ,θ變化的X,Y,Z方向磁感應(yīng)強(qiáng)度
2.3 轉(zhuǎn)子自旋位置解算與仿真分析
檢測點(diǎn)2位于轉(zhuǎn)軸上,其檢測出的磁感應(yīng)強(qiáng)度B的分量Bx,By,Bz的方向一直在旋轉(zhuǎn),假定為坐標(biāo)系X″,Y″,Z″。設(shè)永磁體1,2在檢測點(diǎn)2產(chǎn)生的磁感應(yīng)強(qiáng)度分別為B1h,B2h,得:
(8)
由于檢測點(diǎn)2和永磁體1相對(duì)位置不變,因此可以通過B1h解算B2h。
將X,Y,Z按照沿Z,Y,X軸逆時(shí)針旋轉(zhuǎn)φ,θ,α角度的次序形成X″,Y″,Z″。檢測點(diǎn)2在XYZ中坐標(biāo)為x,y,z,在X″,Y″,″中為x″,y″,y″。得:
推出的x″,y″,z″表達(dá)式:
(9)
同理,能求得B2各分量。
任取θ,φ的值θ=10°,φ=36°。磁感應(yīng)強(qiáng)度分量Bx,By,Bz隨自旋角變化,如圖4所示。
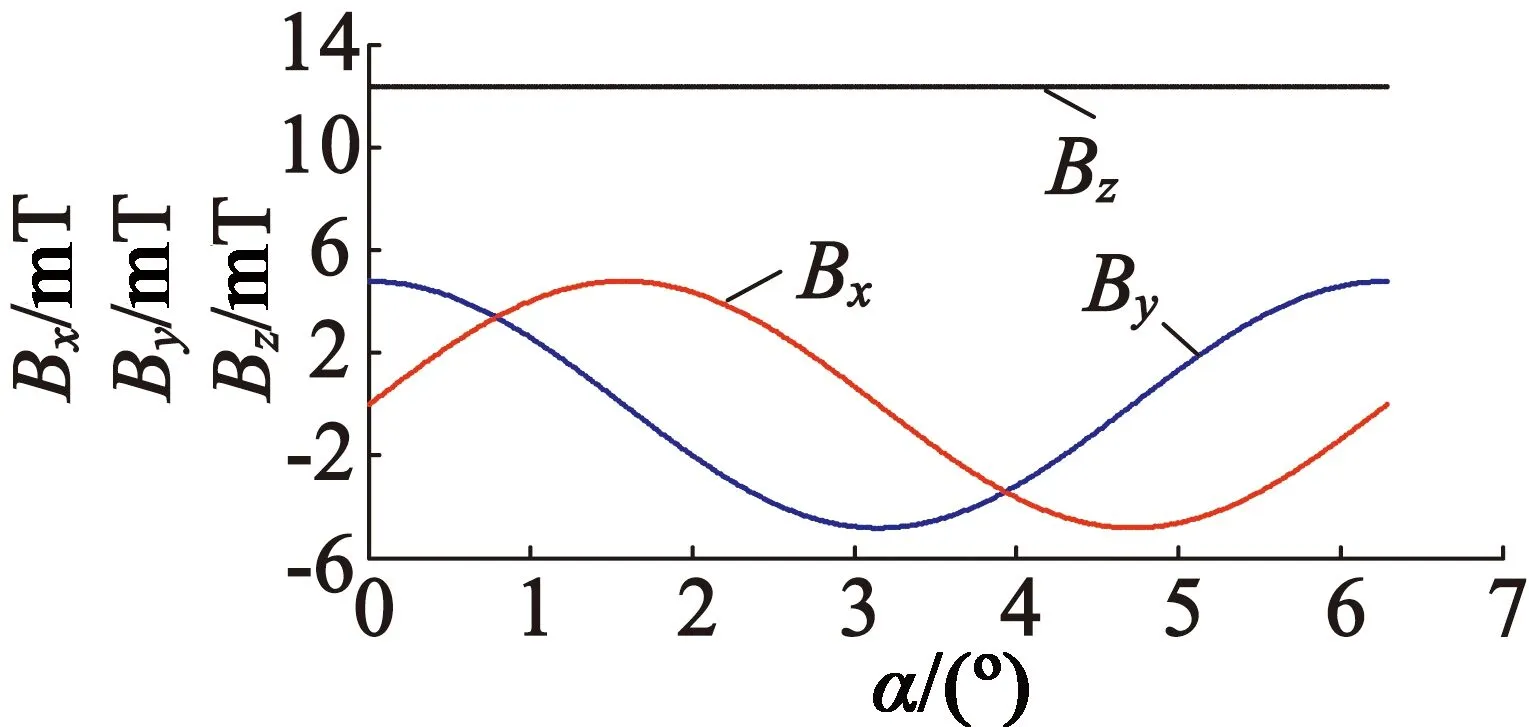
圖4 θ=10°,φ=36°下檢測點(diǎn)2磁感應(yīng)強(qiáng)度分量隨自旋角變化圖
由圖4確定θ,φ值后,檢測點(diǎn)測出的任意一組Bx,By,Bz能確定唯一的α角,如圖5所示。
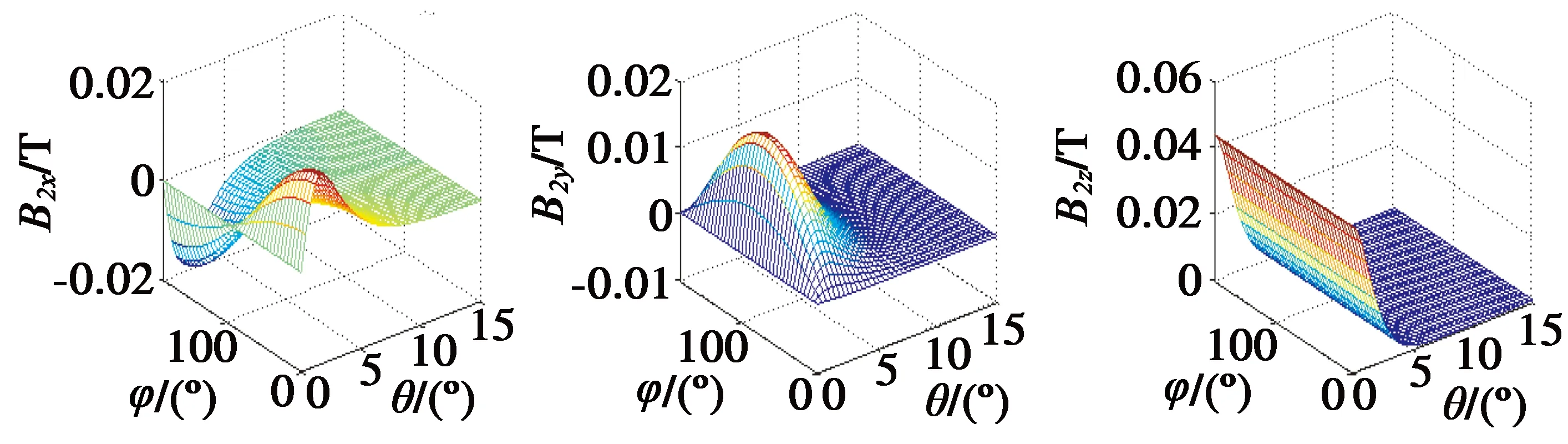
(a)X方向 (b)Y方向 (c)Z方向
圖5φ=36°下檢測點(diǎn)2磁感應(yīng)強(qiáng)度分量與α,θ關(guān)系圖
2.4 轉(zhuǎn)子位置檢測實(shí)驗(yàn)平臺(tái)
為了檢驗(yàn)本文位置檢測算法,依據(jù)該算法搭建位置檢測系統(tǒng)實(shí)驗(yàn)平臺(tái)如圖6所示。下位機(jī)使用STM32F103C8T6單片機(jī)和MLX90363三維霍爾傳感器進(jìn)行位置信息采集。上位機(jī)負(fù)責(zé)處理相關(guān)數(shù)據(jù)并與軟件的仿真結(jié)果進(jìn)行比對(duì)。
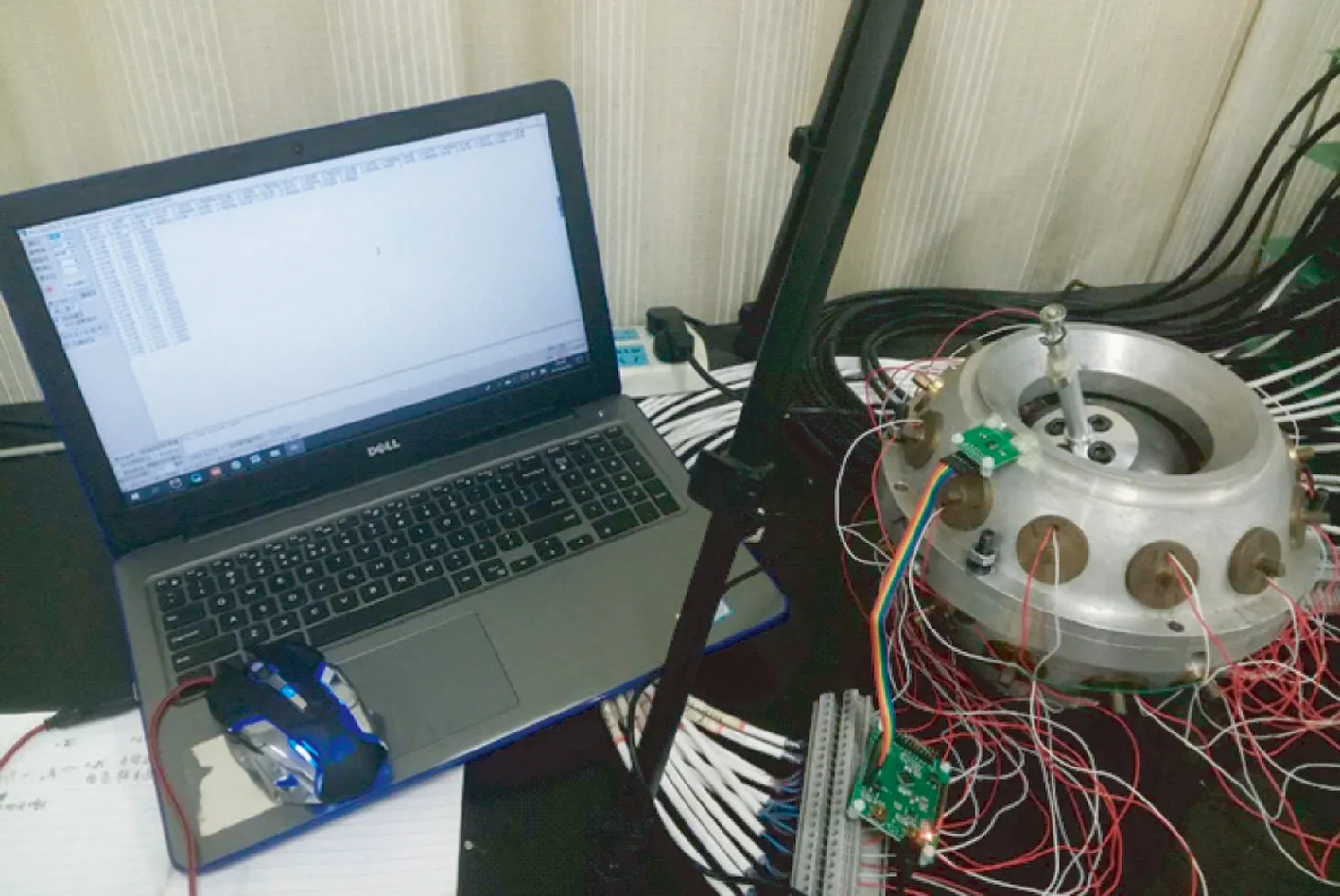
圖6 位置檢測系統(tǒng)實(shí)驗(yàn)平臺(tái)
圖7為STM32F103C8T6單片機(jī)、MLX90363傳感器和顯示在上位機(jī)的轉(zhuǎn)子位置信息。MLX90363是三維霍爾傳感器,在搖桿領(lǐng)域應(yīng)用比較廣泛。它在利用磁場聚集片聚集空間中的磁場的同時(shí),利用集成的霍爾感應(yīng)單元分別檢測三個(gè)正交方向的磁感應(yīng)強(qiáng)度,并用串口SPI通信總線傳輸處理后的位置數(shù)據(jù)。相較于使用多個(gè)線性霍爾傳感器組合進(jìn)行測量的方式,使用三維霍爾傳感器能夠更加便捷地讀取數(shù)據(jù),并減小組合線性霍爾傳感器過程中帶來的人為誤差,能夠在一定程度上提高精度。
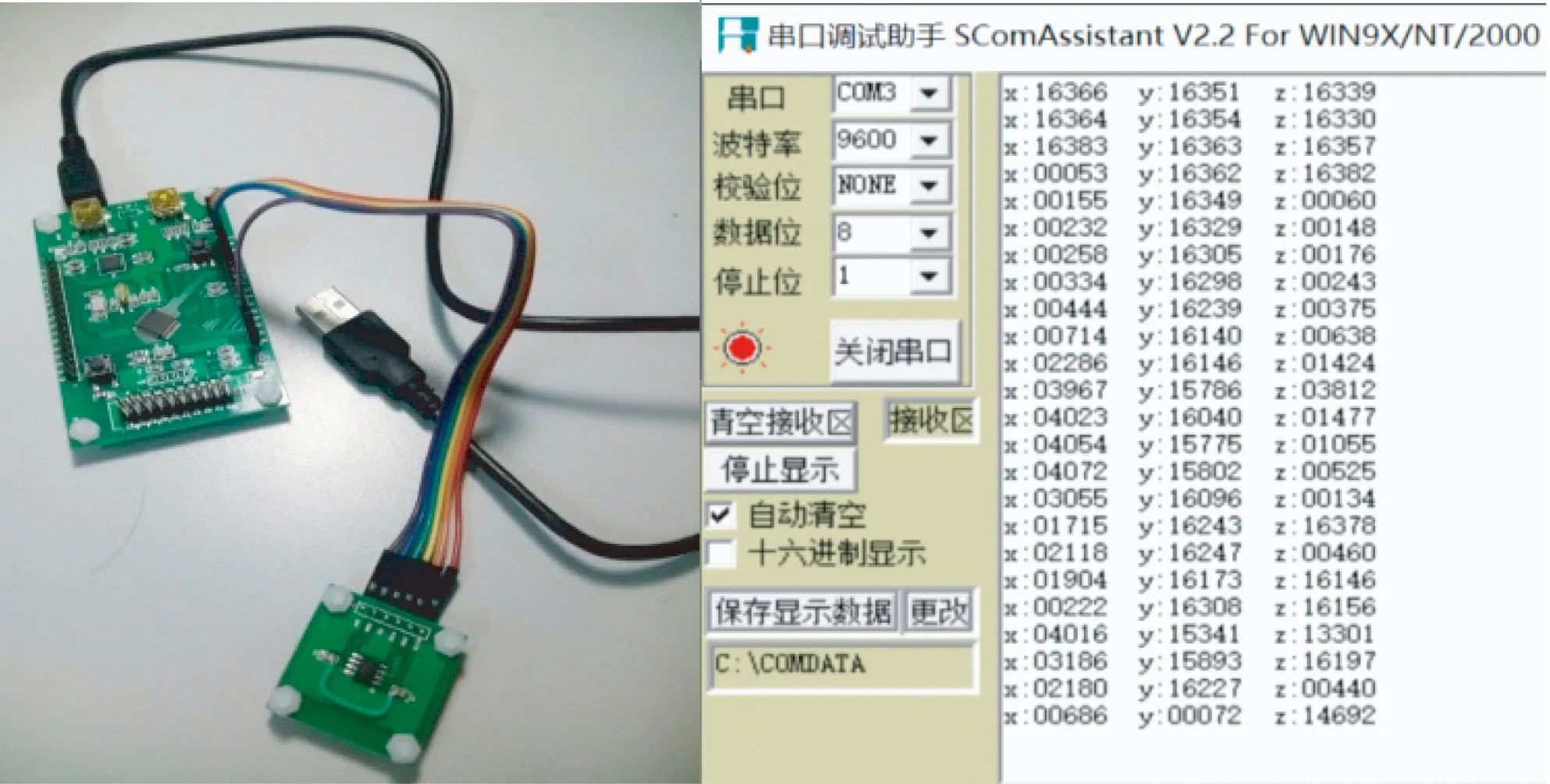
圖7 單片機(jī)、傳感器和采集的數(shù)據(jù)
將球形電動(dòng)機(jī)轉(zhuǎn)軸依照?qǐng)D8中的θ,φ,α預(yù)設(shè)的軌跡進(jìn)行重復(fù)運(yùn)動(dòng)。分別對(duì)θ,φ和α采用60個(gè)不同位置的定位操作,定位點(diǎn)如圖8所示。實(shí)驗(yàn)結(jié)果表明,在θ較小處,誤差偏小,原因在于此時(shí)的磁感應(yīng)強(qiáng)度較大,衰減程度小,能達(dá)到相對(duì)高的計(jì)算精度。θ,φ和α的誤差最大值依次為1°,2°,8°。
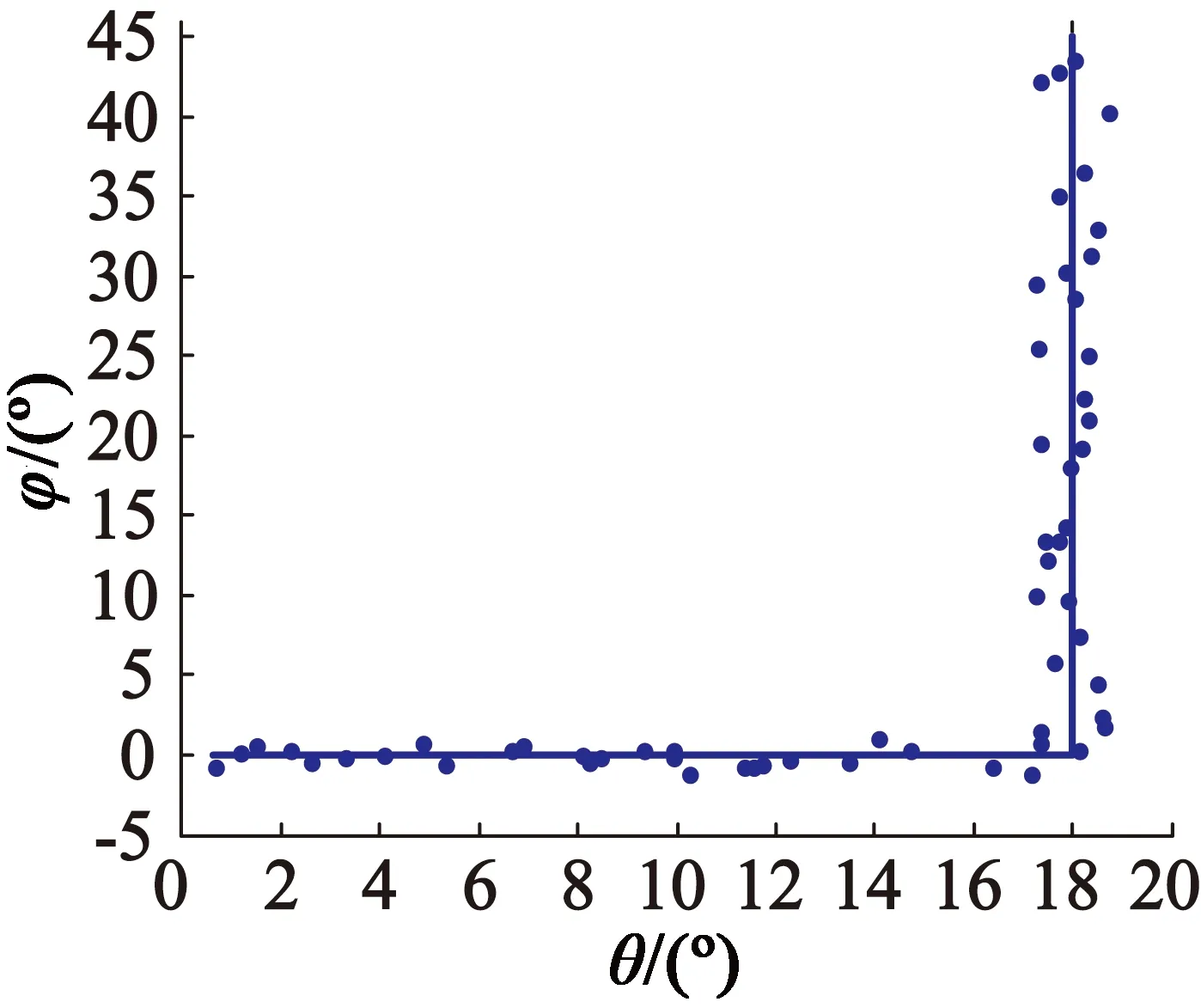
(a) θ,φ定位
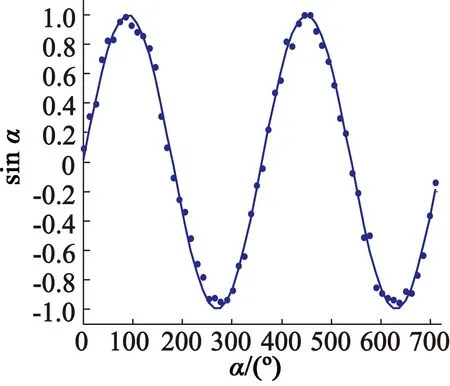
(b) α定位
3 誤差分析
電機(jī)內(nèi)部產(chǎn)生的磁場會(huì)一定程度影響傳感器所在位置測量的磁場,本節(jié)分析非磁場檢測區(qū)永磁體對(duì)檢測區(qū)磁場、電磁線圈、轉(zhuǎn)子永磁體以及永磁體安放問題等對(duì)測量磁場的影響[9-10]。
3.1 其他區(qū)域永磁體對(duì)檢測區(qū)磁場的影響
以A區(qū)域?yàn)槔A傳感器會(huì)感應(yīng)到B,C區(qū)域永磁體的磁感應(yīng)強(qiáng)度。在Ansoft Maxwell中可以仿真得到A,B,C區(qū)域永磁體在傳感器處產(chǎn)生的磁感應(yīng)強(qiáng)度分量:
Bx,y,z=(0.081 3 T,-0.008 91 T,0.105 T)
該值是一個(gè)恒定值。在處理得到的位置信息時(shí),考慮此恒定值能夠消除此誤差。SB,SC同理。
3.2 轉(zhuǎn)子永磁體對(duì)檢測區(qū)域磁場的影響
永磁球形電動(dòng)機(jī)轉(zhuǎn)子上分布有40個(gè)永磁體,會(huì)引起位置測量誤差。使用Ansoft Maxwell搭建本文研究的球形電動(dòng)機(jī)的三維模型[11]。
位于轉(zhuǎn)軸上的傳感器與轉(zhuǎn)子永磁體的相對(duì)位置是固定值,通過仿真,可以得到40個(gè)轉(zhuǎn)子永磁體在該點(diǎn)產(chǎn)生的磁感應(yīng)強(qiáng)度分量同樣是恒定值:
Bx,y,z=(-0.048 8 mT,0.219 mT,0.122 mT)
以A區(qū)域?yàn)槔T贏區(qū)域內(nèi),當(dāng)轉(zhuǎn)子從垂直方向開始偏轉(zhuǎn)到最大角度時(shí),轉(zhuǎn)子的40個(gè)永磁體在SA處產(chǎn)生的磁感應(yīng)強(qiáng)度大小如圖9所示。
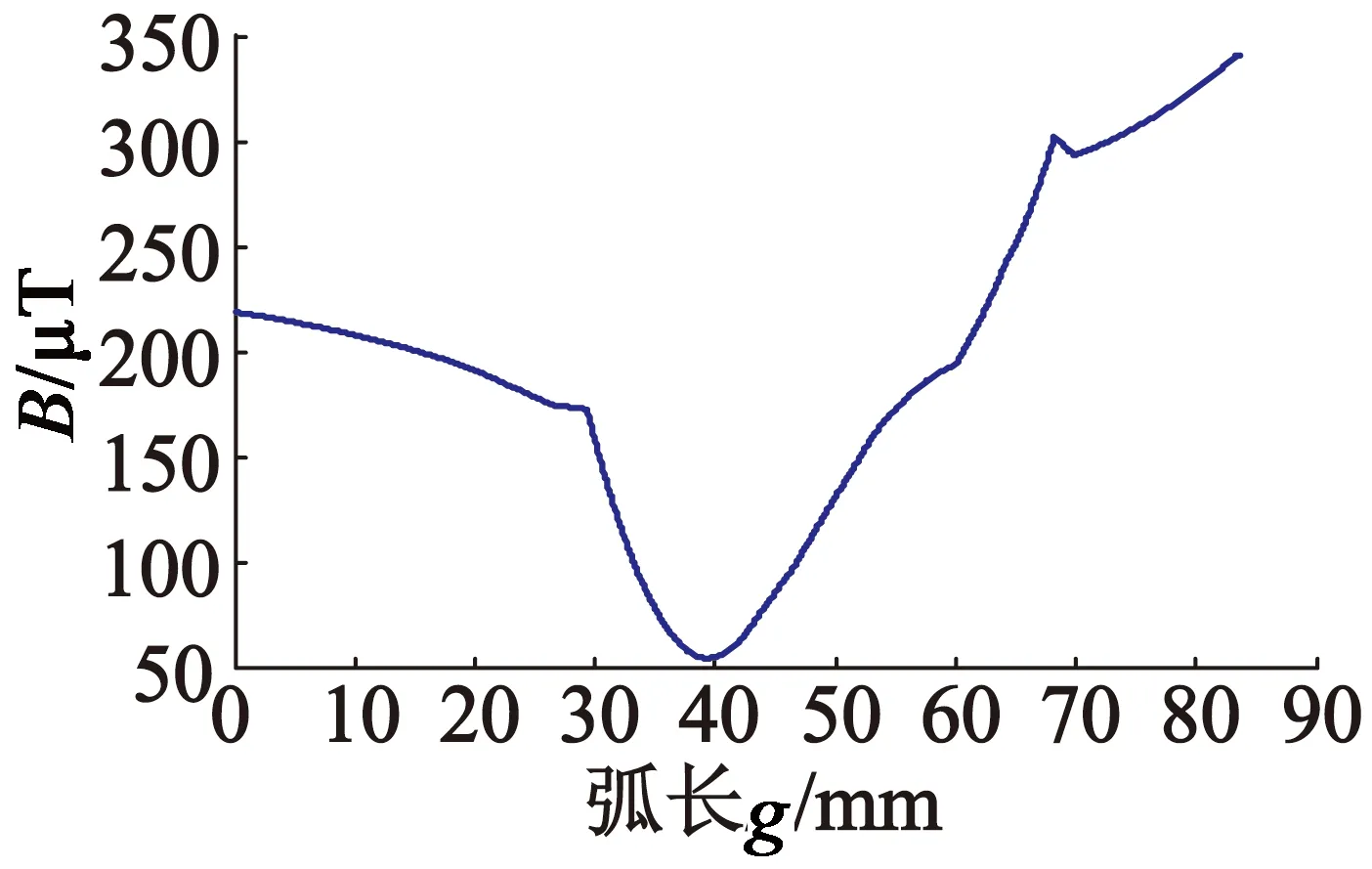
圖9 轉(zhuǎn)子永磁體在SA處產(chǎn)生的磁感應(yīng)強(qiáng)度與角位移的關(guān)系圖
轉(zhuǎn)子的40個(gè)永磁體與轉(zhuǎn)軸上檢測系統(tǒng)中的永磁體相對(duì)靜止,將其視為整體,通過有限元分析和擬合后得到磁感應(yīng)強(qiáng)度變化更為規(guī)律如圖10所示,基于此進(jìn)行進(jìn)一步的理論分析將會(huì)消除該項(xiàng)誤差。
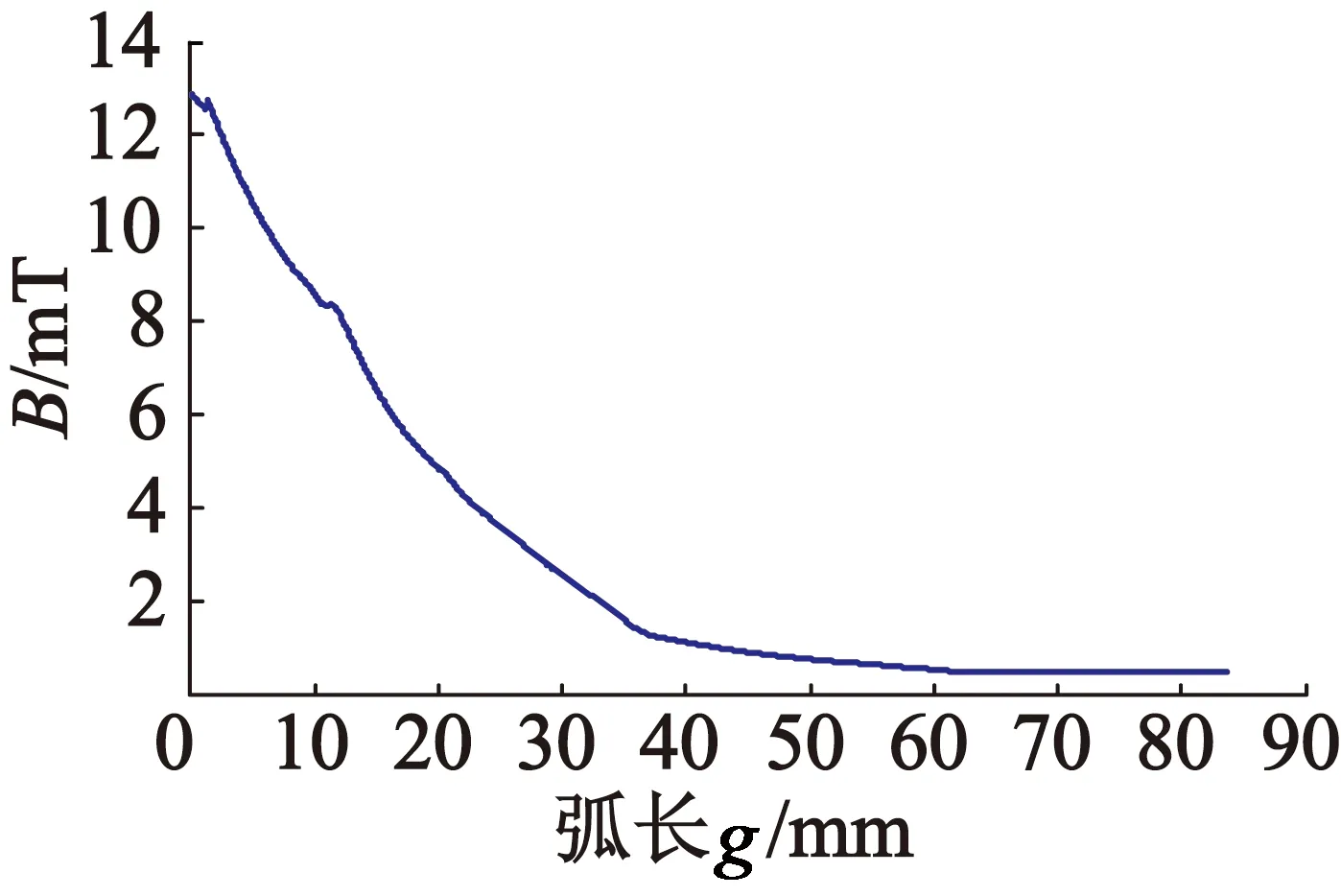
圖10 組合永磁體在SA處產(chǎn)生的磁感應(yīng)強(qiáng)度與角位移的關(guān)系
3.3 定子線圈對(duì)測量磁場的影響
通電線圈的勵(lì)磁同樣會(huì)帶來影響。以A區(qū)域?yàn)槔T贏區(qū)域內(nèi),選取距離傳感器SA最近的通過電流1 A,1 200 匝的一個(gè)線圈。仿真如圖11所示。從圖11中看出,隨著定子線圈中的電流變化,定子線圈在SA處產(chǎn)生的磁感應(yīng)強(qiáng)度也隨周期變化,且最大值均小于0.8 mT。
通過模擬通電策略下多個(gè)通電線圈磁場的疊加,可以模擬24個(gè)線圈對(duì)SA處產(chǎn)生的影響。在此不做贅述。
選取同樣的一個(gè)定子線圈通過電流1 A,1 200 匝,其對(duì)轉(zhuǎn)軸上傳感器的影響隨著時(shí)間、轉(zhuǎn)軸傾斜角位移的變化如圖12所示。
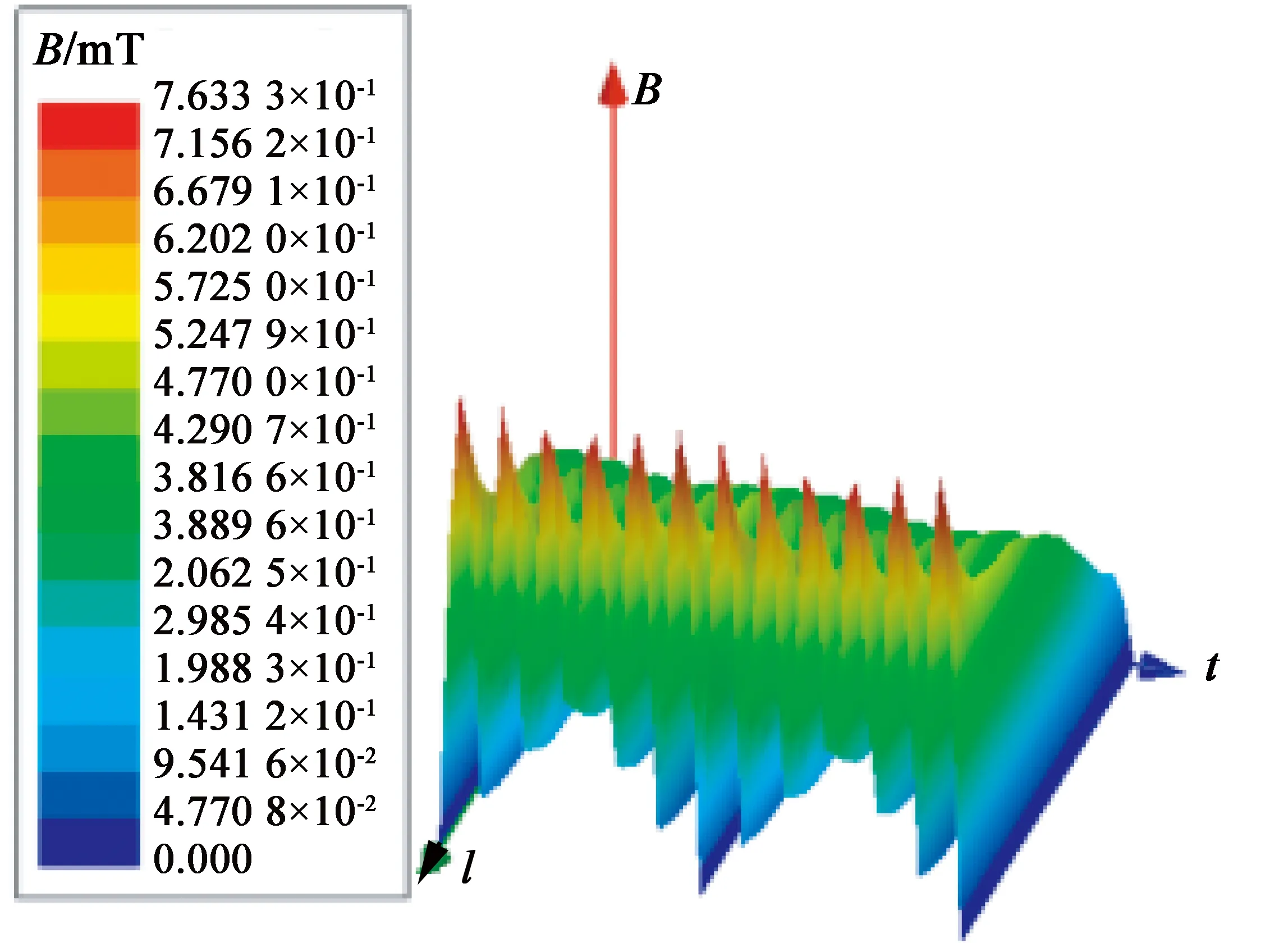
圖12 定子線圈在轉(zhuǎn)軸傳感器處產(chǎn)生的磁感應(yīng)強(qiáng)度
當(dāng)轉(zhuǎn)軸達(dá)到最大傾斜角且靠近所用線圈時(shí),磁感應(yīng)強(qiáng)度最大,為0.76 mT。這個(gè)值在一定程度上會(huì)影響數(shù)據(jù)處理和最終的位置檢測的精確性。
3.4 轉(zhuǎn)軸永磁體位置偏移對(duì)位置測量的影響
在實(shí)驗(yàn)中,永磁體不能鑲嵌在轉(zhuǎn)軸內(nèi),只能固定在轉(zhuǎn)軸上,對(duì)于半徑為r的永磁體,實(shí)際的轉(zhuǎn)軸的空間位置與理論的位置相差的角度:
(10)
式中:l表示永磁體幾何中心與轉(zhuǎn)子球心之間的距離。計(jì)算的誤差為4.17°。
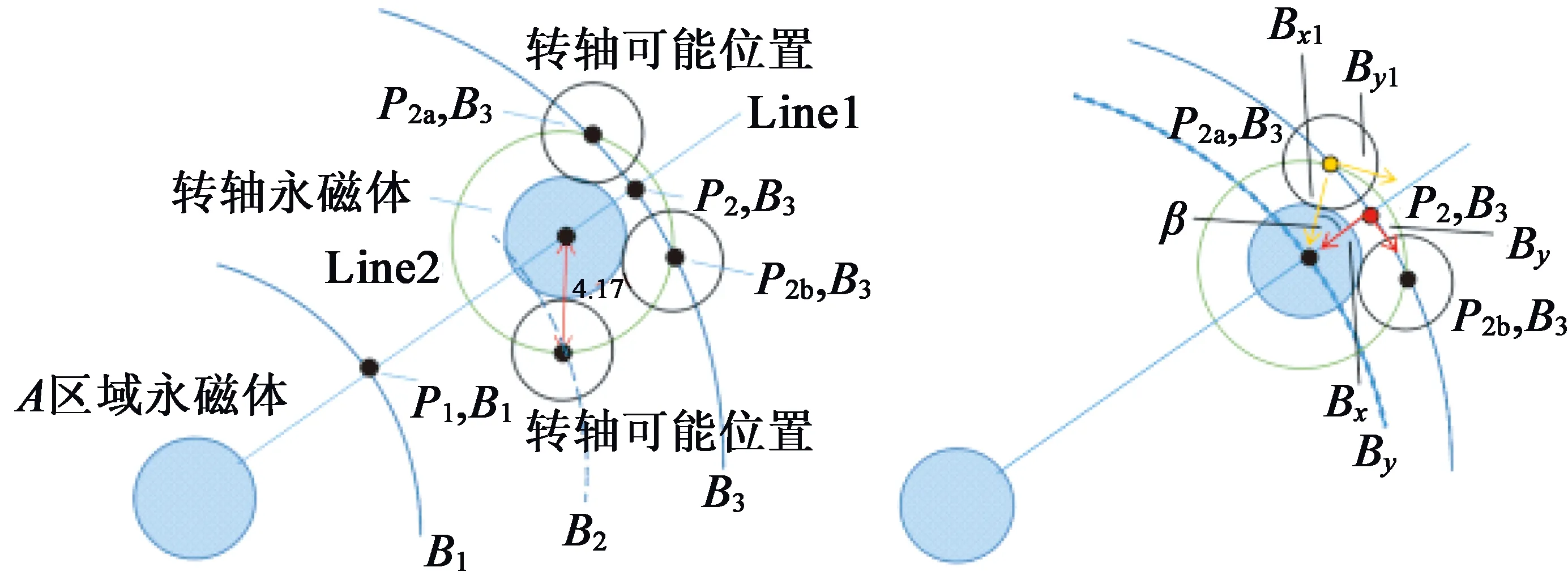
圖13 轉(zhuǎn)軸永磁體位置與誤差說明圖
在解算轉(zhuǎn)軸永磁體的位置后,轉(zhuǎn)軸位置的可能性如圖13所示。以A區(qū)域?yàn)槔汕拔目芍珹區(qū)域永磁體在Line1上產(chǎn)生的磁感應(yīng)強(qiáng)度隨著不斷遠(yuǎn)離永磁體而衰減,即B1>B2>B3。
假設(shè)在某個(gè)位置轉(zhuǎn)軸傳感器測量的磁感應(yīng)強(qiáng)度為B3,可以確定位置為P2。在Line2上磁感應(yīng)強(qiáng)度能達(dá)到B3的位置僅僅只有P2a和P2b兩個(gè)位置。對(duì)于位于此位置傳感器,A區(qū)域永磁體在此處的磁感應(yīng)強(qiáng)度為B3。
考慮P2,P2a,P2b,由于Bz分量是沿著轉(zhuǎn)軸且大小相同的,故在XY平面上的分量大小是相同的。需要確定轉(zhuǎn)軸位于位置P2a或P2b。假設(shè)轉(zhuǎn)軸位于位置P2a,在該點(diǎn)可以得到:
(11)
式中:β∈[-90°,90°]。
在圖14中,當(dāng)轉(zhuǎn)軸傳感器X方向朝向A區(qū)域永磁體時(shí),α為直角,Bx絕對(duì)值分量最大,By分量最小。當(dāng)By趨近于零時(shí):
(12)
比較By1和Bx1的值,如果符號(hào)相反,則β為正,轉(zhuǎn)軸位于P2a;否則轉(zhuǎn)軸位于P2b。對(duì)于Bn>B3的情況同樣適用。
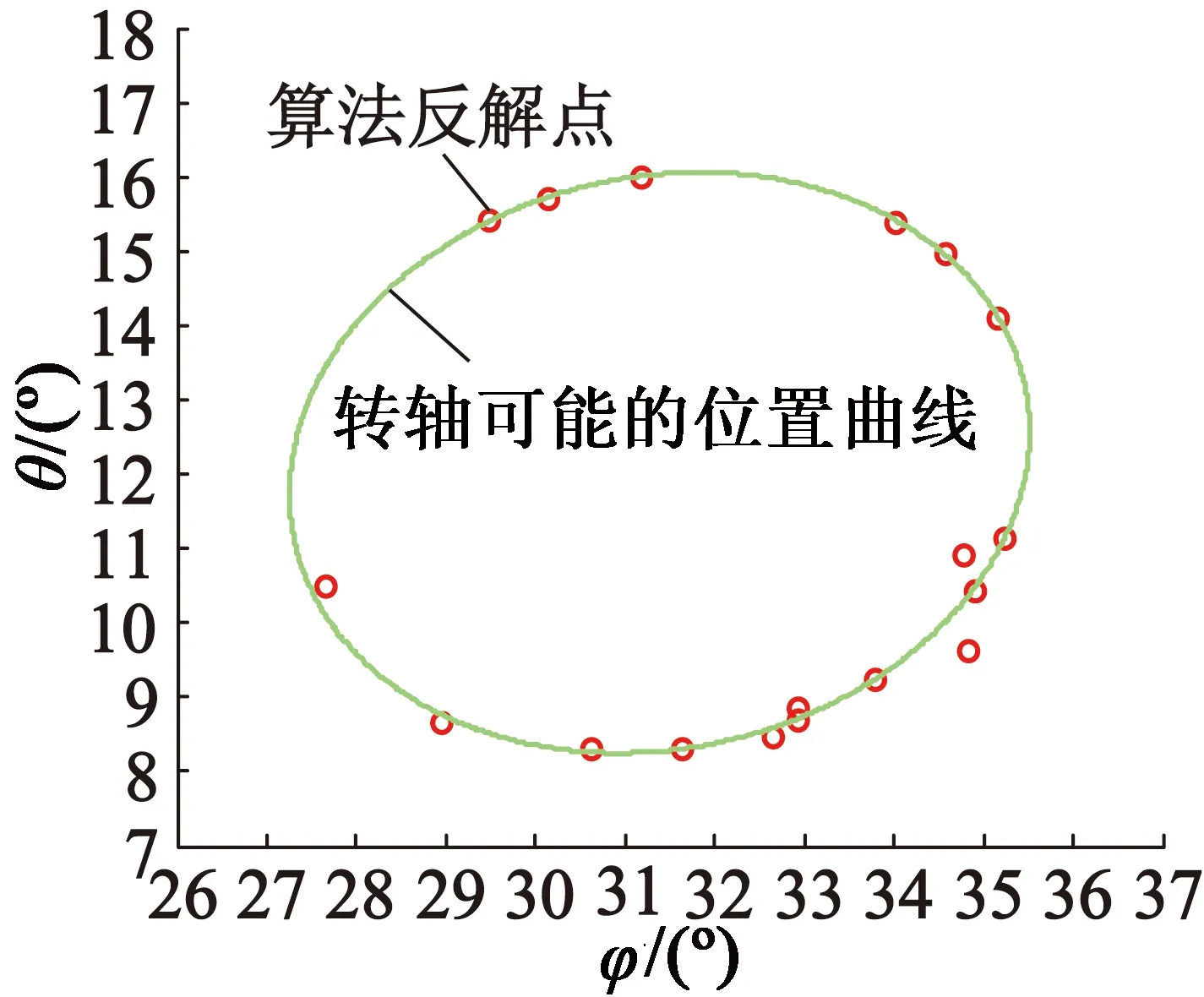
圖14 永磁體位于某位置下轉(zhuǎn)軸可能的位置和計(jì)算的位置
在圖14中,任取永磁體處在φ=46°,θ=15°的中心位置,根據(jù)此時(shí)轉(zhuǎn)軸在不同位置下傳感器返回的數(shù)據(jù)進(jìn)行測算,能得出此時(shí)轉(zhuǎn)軸所在的真實(shí)位置。該算法能夠有效地預(yù)防因?yàn)橛来朋w不能鑲嵌在轉(zhuǎn)軸內(nèi)而帶來的誤差。
4 結(jié) 語
本文使用分布式磁偶極子法對(duì)徑向充磁的圓柱形永磁體附近的磁感應(yīng)強(qiáng)度變化進(jìn)行了分析。以此為基礎(chǔ),模擬永磁體跟隨轉(zhuǎn)軸轉(zhuǎn)動(dòng)的情況,通過固定的磁感應(yīng)強(qiáng)度傳感器采集位置信息數(shù)據(jù),通過坐標(biāo)變換解算轉(zhuǎn)軸空間位置,同時(shí)通過另一組轉(zhuǎn)動(dòng)的傳感器和固定的永磁體解算轉(zhuǎn)軸旋轉(zhuǎn)的角度。仿真結(jié)果證明此方法的有效性。此外,通過使用單片機(jī)STM32F103C8T6和傳感器MLX90363進(jìn)行數(shù)據(jù)的采集,通過上位機(jī)的處理計(jì)算定位誤差。同時(shí)本文對(duì)位置檢測過程中的誤差來源進(jìn)行了全面的理論仿真分析。為球形電動(dòng)機(jī)轉(zhuǎn)子位置檢測的發(fā)展和完善給予一定幫助。
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
