基于地形匹配的直升機低空飛行前視告警方法
2019-03-05 03:37:18張碩儼陸洋
北京航空航天大學學報 2019年2期
張碩儼, 陸洋
(南京航空航天大學 直升機旋翼動力學國家級重點實驗室, 南京 210016)
直升機在飛行過程中,由于缺乏對周圍地形感知而發生墜毀的情況,稱為可控飛行撞地。利用直升機前視告警系統可有效避免此類事故的發生[1-2]。然而,現有的直升機前視告警系統通常只適用于飛行高度較高的巡航飛行。對于經常需要執行低空飛行任務的直升機,如醫療救護直升機、武裝直升機等,當其離地高度很低(通常小于100 m)時,由于告警系統的告警邊界過大,會產生持續虛警。因此,為減少直升機低空飛行時告警系統的虛警,需在確保飛行安全的前提下縮小前視告警邊界。然而,由于導航誤差與地形數據庫誤差的存在,使得直升機與地形的相對位置也存在一定誤差。若僅縮小直升機前視告警邊界而不做任何修正處理,將會導致告警失敗。可見,如何準確獲取直升機與地形間的相對位置是直升機低空飛行前視告警的關鍵。
國內外對于準確獲取運動物體與地形間相對位置這一問題,主要集中在導彈、固定翼飛機、潛艇等領域。文獻[3]采用地形輪廓匹配算法準確獲取導彈與地形的相對位置,但該算法不允許飛行器進行機動飛行;文獻[4]采用桑迪亞慣性地形輔助導航算法修正戰斗機與地形的相對位置誤差,但該算法在地形梯度變化劇烈區域易造成濾波發散。對于直升機而言,經常需要在復雜的地形上空進行機動低空飛行,因此上述2種方法都不適用于直升機低空飛行告警。而文獻[5]采用的互功率譜算法,可準確獲取潛艇與地形的相對位置,該算法作為一種性能優良的圖像匹配算法,不僅對地形適應性強,而且在匹配時允許潛艇作機動航行[6]。
由于直升機對地形匹配的技術需求與潛艇具有較大的相似性,因此,本文基于互功率譜算法,開展基于地形匹配的直升機低空飛行前視告警方法研究。首先,建立直升機逃逸軌跡模型并確定直升機前視告警邊界;然后,基于互功率譜算法進行地形匹配,以準確獲取直升機與地形的相對位置,并利用地形熵選擇匹配區域提高匹配精度;最后,構建測試算例對本文提出的方法進行仿真驗證。
1 直升機低空飛行前視告警方法
直升機前視告警方法的核心是告警邊界,目前告警邊界的設計方法主要有美國Honeywell公司的告警邊界設計方法[7]和基于逃逸軌跡的告警邊界設計方法[8]。其中,Honeywell的告警邊界為考慮通用性,其邊界設計趨于保守,低空飛行時虛警率較高,不適用于直升機低空飛行。基于逃逸軌跡的告警邊界設計方法則基于直升機的飛行性能,能夠在保證安全的基礎上最大程度的縮小告警邊界以減小虛警率,因此本文采用該方法。
基于逃逸軌跡的告警邊界設計方法,首先需要確定直升機的逃逸軌跡,然后在此基礎上設計告警邊界。
1.1 直升機逃逸軌跡
直升機的逃逸過程通常可分為3個階段:飛行員反應、拉起改出和穩定爬升。其中,飛行員反應階段保持直升機當前狀態飛行,穩定爬升階段以拉起改出階段最終時刻的狀態為基準進行勻速飛行,這兩部分均為直線運動軌跡;而拉起改出為機動飛行狀態,其軌跡為復雜的空間曲線,是逃逸軌跡中最為關鍵的部分,直接決定了逃逸軌跡的整體形態。圖1示出了直升機逃逸軌跡的3個主要組成部分。
由文獻[9]可知,直升機逃逸軌跡的拉起改出部分與拋物線方程擬合度較高,該部分逃逸軌跡高度H可表示為
H=c0+c1x+c2x2
(1)
式中:x為軌跡的橫向坐標;c0、c1和c2為待定擬合系數。擬合系數的大小與直升機的飛行性能相關,通常需要基于飛行試驗數據擬合求解,亦可利用高精度直升機飛行動力學模型獲得,本文采用第2種方法。

圖1 直升機逃逸軌跡各部分組成示意圖Fig.1 Schematic diagram of each part of helicopter escape trajectory
在實際應用時,對于給定機型,首先離線計算各種不同組合飛行狀態下逃逸軌跡拉起改出部分的擬合系數,在實際飛行過程中,通過多維插值即可獲得該飛行狀態下的系數值,從而得到相應逃逸軌跡的拉起改出部分。
1.2 直升機前視告警邊界
參考文獻[10],將逃逸軌跡中飛行員反應階段的時間設定為2 s。此外,由于傳感器誤差以及地形數據庫誤差等因素的存在,直升機在飛行過程中應在其下方留有一段安全距離,即最小安全高度。在現有直升機近地告警產品中,如美國Honeywell公司的MXKKII,將最小安全高度的最大值設為500 feet(對應高度152.4 m),對于直升機低空飛行而言,顯然不能直接采用。因此,本文根據傳感器誤差、地形數據庫誤差以及地形平均斜率等因素,將最小安全高度設為50 m。以UH-60直升機為例,設飛行初始狀態為:前飛速度為40 m/s,下降率為4 m/s,則得到告警邊界如圖2所示。圖中:x、z為軌跡坐標。

圖2 UH-60直升機逃逸軌跡及告警邊界示意圖Fig.2 Schematic diagram of escape trajectory ands alert envelope for UH-60 helicopter
2 直升機/地形相對位置的準確獲取
在確定了直升機前視告警邊界后,須進一步準確獲取直升機與地形的相對位置,才能進行有效告警。此外,為避免匹配區域選擇不當導致的匹配失敗,在進行地形匹配之前,利用地形熵選擇匹配區域,以提高匹配的準確性。
2.1 直升機低空飛行地形匹配方法
互功率譜算法的基本原理是利用快速傅里葉變換將2個相關矩陣由空域變換到頻域,再根據傅里葉變換的位移性質,得到一個反映兩者相對誤差的脈沖函數[11-12]。將該方法應用于直升機與地形匹配時,須將直升機雷達探測得到的地形高程矩陣和機載地形數據庫的地形高程矩陣進行快速傅里葉變換,得到一個互功率譜,由歸一化的互功率譜計算出一個脈沖函數,由該函數即可得到直升機與地形的相對位置誤差。
直升機雷達探測的地形高程矩陣和機載地形數據庫地形高程矩陣的互功率譜G(u,v)可表示為
(2)

F-1(e-j2π(uΔx+vΔy))=δ(x-Δx,y-Δy)
(3)
當直升機與地形的相對位置誤差為0時,該脈沖函數會產生一個明顯的沖激峰,其值為1,而其他區域則為0,如圖3(a)所示。當相對位置誤差較小時,2個地形高程矩陣存在的水平偏移量引起的脈沖函數將產生一個明顯的沖激峰。相對位置誤差越小,2個地形高程矩陣重疊區域越大,則沖激峰值越接近1,其他區域的值越接近于0,如圖3(b)所示。此時沖激峰的位置坐標即為直升機與地形的相對位置誤差值。而當相對位置誤差很大時,該函數的能量將從單一峰值分散到許多小峰值,如圖3(c)所示。圖中:X、Y為脈沖函數坐標。
2.2 不同地形對匹配方法的影響分析
此處通過仿真測試,考察不同地形起伏程度對互功率譜算法的有效性影響。首先利用馬爾可夫算法隨機生成一個起伏程度較大的地形[13],大小為220×220矩陣網格,地形高程均值為487 m,極差為55 m,方差為81 m2,如圖4所示。
在該地形中取出2 個200×200的矩陣作為待匹配地形,兩矩陣X、Y方向的平移偏差值均為20。對2個待匹配地形矩陣進行快速傅里葉變換,再計算得到脈沖函數,如圖5所示。該脈沖函數中存在一個明顯的沖激峰,其坐標為(20,20),峰值為0.44,由此可得到2個待匹配地形矩陣X、Y方向的平移偏差值均為20。
進一步生成一個起伏程度較小的隨機地形,地形高程均值為497 m,極差為5 m,方差為1.6 m2,如圖6所示。
同樣在該地形中取出2個200×200的矩陣作為待匹配地形,兩矩陣X、Y方向的平移偏差值均為20。計算得到脈沖函數如圖7所示。可見,該脈沖函數中不存在明顯的沖激峰,此時匹配失敗。
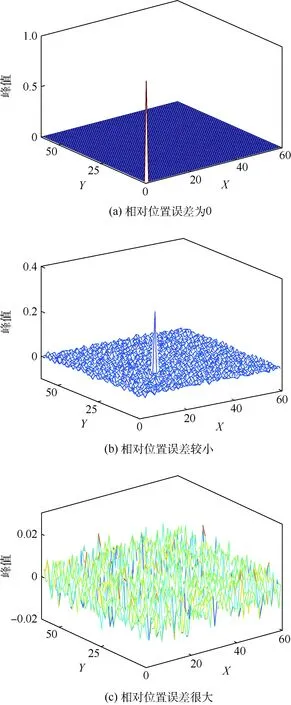
圖3 不同相對位置誤差下的脈沖函數Fig.3 Pulse functions with different relative position errors

圖4 起伏較大的隨機地形Fig.4 Undulating random terrain

圖5 匹配成功時的脈沖函數Fig.5 Pulse function on successful matching
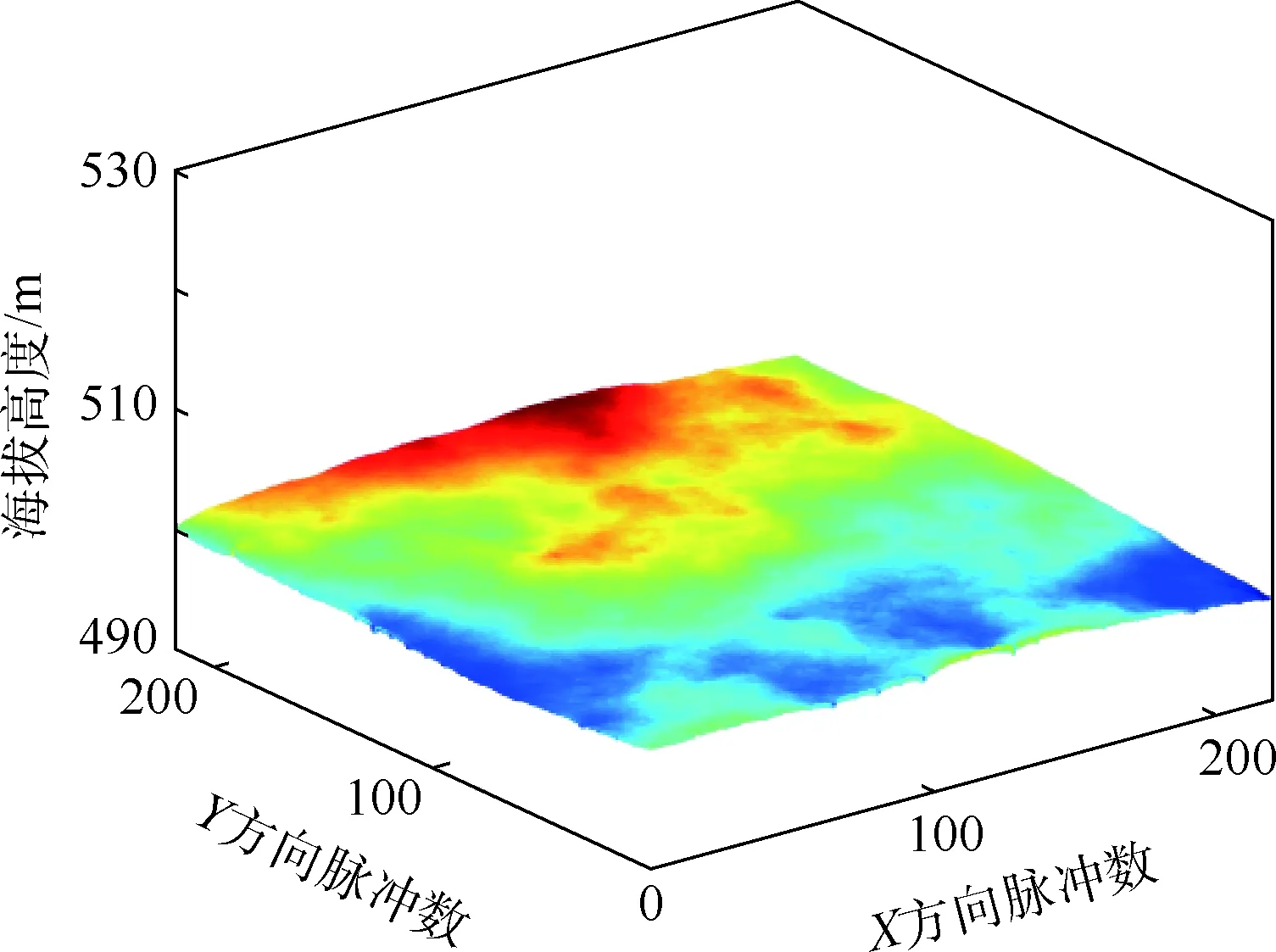
圖6 起伏較小的隨機地形Fig.6 Small undulating random terrain
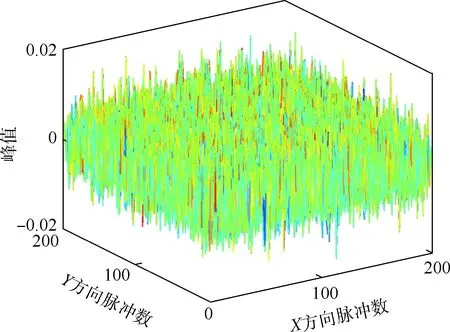
圖7 匹配失敗時的脈沖函數Fig.7 Pulse function on failed matching
上述仿真測試表明,互功率譜算法的匹配效果受地形起伏程度影響很大,地形起伏程度越大,地形越獨特,匹配準確度越高,因此山地等地形較適合地形匹配,而平原、沙漠等地形易導致匹配失敗。
2.3 地形熵選擇匹配區域
針對平原、沙漠等包含信息量較少的區域,本文參考文獻[14],采用地形熵選擇匹配區域方法來解決此問題。
地形熵能夠用來描述地形起伏的劇烈程度,當某區域的局部地形高度值變化較為劇烈時,地形所包含的信息量比較豐富,此時計算得到的地形熵較小,而越小的地形熵越有利于進行匹配運算。地形熵的定義式為
(4)
式中:p為無量綱的地形高度值;h為地形高度值;i為地形采樣點的序號;M為地形采樣點個數的總量;Hterrain為地形熵。
在進行地形匹配前,首先計算直升機當前位置附近區域的地形熵,若地形熵小于預先設定閾值,則進行地形匹配。這樣,避免了在平原等區域進行匹配導致的匹配失敗,有效提高了地形匹配的準確性。
以圖4地形為例,可取出共441個200×200的高程矩陣,參考文獻[15]將地形熵閾值設為9,計算得到有25個高程矩陣的地形熵大于閾值,而其中有19個匹配失敗。將該25個高程矩陣篩除后,剩余416個矩陣均能夠匹配成功。
3 算法仿真測試
本文利用MATLAB開展對基于地形匹配的直升機低空飛行前視告警方法的仿真測試。首先給出算法性能的評價指標,然后給出仿真測試的參數設置,最后給出仿真結果及分析。
3.1 算法性能評價指標
根據文獻[16],此處采用虛警率和告警成功率作為評價告警方法的性能指標。
虛警是指告警系統在直升機安全飛行時給出了不必要的告警,虛警率定義為
(5)
式中:Nu為虛警算例個數;N為算例總數。
告警成功率則是相對告警失敗而言的。告警失敗是指告警提示過晚,飛行員得到告警信號時已經無法及時改出而導致撞地事故。告警成功率定義為
(6)
式中:Nf告警失敗算例個數。
表1給出了前視告警方法的性能指標判斷標準。
需要說明的是,計算虛警率和告警成功率的算例總數僅包括產生告警的算例。

表1 前視告警方法性能指標判斷標準Table 1 Judgement criteria for performance index of forward looking alert method
3.2 仿真參數設置
為對比驗證本文提出的基于地形匹配的直升機低空飛行前視告警方法的優勢,仿真中設置了2個測試組,一個為采用本文方法的匹配組,另一個為采用常規告警方法的對照組,2個測試組的告警邊界相同,均采用基于逃逸軌跡的告警邊界,最小安全高度設為50 m,但對照組未結合地形匹配算法,無法修正直升機與地形的相對位置誤差。
1) 地形參數設置:類似圖4,仿真地形采用馬爾可夫算法隨機生成的500組地形,地形高程均值約為400 m,地形矩陣大小均為220×220,設每個矩陣網格大小為90 m,總大小即為19 800 m×19 800 m,2個測試組均在500組地形進行仿真飛行測試。
2) 直升機飛行參數設置:仿真基于UH-60直升機飛行動力學模型。直升機由地形矩陣坐標(20,100)處出發,在500 m海拔高度以40 m/s的速度平飛,無線電高度均值約為100 m,終點為矩陣坐標(160,100)處,每0.5 s主動探測直升機周圍10×10矩陣網格的地形數據,并計算地形熵,當地形熵小于9時,則進行地形匹配。飛行期間發生告警或到達終點則停止該次仿真測試。
3) 誤差參數設置:測試開始時,2個測試組直升機與地形的位置誤差均為3個矩陣網格,即270 m,匹配組與對照組中各有一半測試組的誤差方向沿直升機飛行方向,即直升機導航位置位于實際位置前方,另一半誤差方向相反,即直升機導航位置位于實際位置后方。
3.3 仿真結果與分析
由3.2節可知,在仿真測試中,對照組存在導航位置誤差,告警邊界以導航位置為準,而正常飛行軌跡和逃逸軌跡則以實際位置為準。取仿真測試中的典型算例為例,如圖8和圖9所示。圖8(a)、圖8(b)為測試中同一地形下的2個測試組,其中匹配組告警成功,而對照組產生虛警。圖8(a)中,告警邊界、正常飛行軌跡與地形相交,而逃逸軌跡與地形不相交,此時告警成功。圖8(b)中導航位置在實際位置前方,告警邊界與地形相交,而正常飛行軌跡、逃逸軌跡與地形不相交,此時為虛警。圖8(c)為該地形下,2個測試組直升機與地形相對位置誤差隨時間變化的曲線。從圖中可以看出,仿真開始時2組的相對位置誤差均為3個矩陣網格,但匹配組通過地形匹配修正了這一誤差。

圖8 對照測試AFig.8 Controlled trial A
圖9(a)、圖9(b)為仿真測試中同一地形下的另外2個測試組,其中匹配組告警成功而對照組告警失敗。圖9(a)所述狀態與圖8(a)相似,為告警成功。而圖9(b)中導航位置在實際位置后方,告警邊界、正常飛行軌跡、逃逸軌跡均與地形相交,此時告警失敗。圖9(c)為該地形下,2個測試組直升機與地形相對位置誤差隨時間變化的曲線。同樣可以從圖中看出,匹配組通過地形匹配修正了相對位置誤差。
完成對照組、匹配組各500組仿真測試算例后,得到的測試結果如表2所示。
從表2的仿真結果可以看出,對于采用地形匹配的本文告警方法,相比于常規告警方法,虛警率明顯降低(約16%),告警成功率顯著提高(近30%)。

圖9 對照測試BFig.9 Controlled trial B

表2 告警方法仿真測試結果Table 2 Simulation test results of alert method
4 結 論
本文將基于互功率譜算法的圖像匹配方法應用于直升機地形匹配,有效地修正了直升機與地形的相對位置誤差,并據此提出了直升機低空飛行前視告警方法,有效實現了直升機低空飛行防撞告警。主要結論如下:
1) 互功率譜算法的匹配效果受地形起伏程度影響,地形起伏程度越大,地形越獨特,匹配準確度越高。
2) 對于直升機低空飛行狀態,未結合地形匹配的常規告警方法由于直升機與地形的相對位置不準確,導致告警成功率低、虛警率高。結合地形匹配后的前視告警方法告警成功率顯著提高,虛警率明顯降低,證明了本文提出的前視告警方法能夠很好地適應直升機低空飛行的防撞告警要求。
