一種衛星反作用飛輪延壽方法
2019-03-06 01:10:46
航天器工程 2019年1期
(西安衛星測控中心,航天器在軌故障診斷與維修重點實驗室,西安 710043)
反作用飛輪(以下簡稱飛輪)是衛星姿態控制系統中重要的慣性執行機構,具有可靠性好、控制精度高和功耗低等優點[1-2]。它通常采用軸承組件作為旋轉和支撐的組件單元,長期頻繁使用會造成軸承磨損。例如,基于零動量控制的在軌側擺機動成像衛星,需要頻繁采用飛輪實現高精度姿態控制,導致飛輪因長期軸承摩擦引起工作電流、溫度增大,出現性能退化或失效,影響衛星姿態安全。因此,研究飛輪延壽方法,對于確保衛星姿態安全,進而確保航天任務的有效完成具有重要作用。
要延長飛輪壽命,就要減少其工作時間,這就要求衛星上能夠產生其他形式的力矩進行姿態控制。磁力矩器的工程應用已經十分成熟[3-6],通過引入磁力矩器工作,實現磁力矩器與飛輪的聯合姿態控制,能減少飛輪工作時間,是一種可行的飛輪延壽策略。目前,對磁輪聯合控制的研究取得了一定的成果。文獻[7]中研究了飛輪故障時通過磁輪聯合控制實現小衛星三軸高精度姿態控制問題,文獻[8]中研究了使用磁輪聯合控制實現小衛星初始姿態快速捕獲問題,文獻[9]中研究使用磁輪聯合控制實現小衛星姿態機動的問題。以上磁輪聯合控制研究主要針對磁輪力矩分配問題,用于解決小衛星的姿態控制問題,而對于衛星在飛輪性能退化條件下如何減少飛輪工作時長、延長其在軌使用壽命這一問題,針對性不強。
本文提出一種姿態機動時輪控、正常穩態模式時滾動軸磁控(飛輪不接入系統)的磁輪聯合控制方法,通過仿真分析對聯合控制方法中滾動軸穩態磁控算法進行驗證,最后對所提出的控制方法進行了在軌驗證。
1 磁輪聯合控制方法
磁控在微小衛星中可用于單獨的姿態控制,或者磁控與飛輪同時工作實現姿態控制。由于磁控力矩較小,大多數衛星常使用飛輪進行姿態控制,使用磁控進行飛輪卸載。磁控力矩雖然較小,但可替代飛輪進行穩態模式下的姿態保持,從而減小飛輪工作時間,延長飛輪的工作壽命。因此,本文提出姿態機動過程采用三軸輪控,姿態穩態過程滾動軸采用磁力矩器進行控制,滾動軸飛輪不接入系統工作。
姿態機動模式下采用比例積分微分(PID)輪控,在正常穩態模式下使用比例微分(PD)磁控,從而減少飛輪穩態工作時間,延長其在軌工作壽命。由于磁力矩器在卸載或入軌捕獲外的其他階段并不工作,因此要在正常穩態模式下使用磁控,首先要確定磁控力矩大小,具體是通過三軸磁力距器磁控電流大小來確定。確定磁控力矩大小后,再進一步確定磁控與輪控方式的切換條件及過程。
1.1 正常穩態模式下滾動軸PD磁控
磁控工作原理為:根據衛星姿態信息,在衛星本體坐標系下,磁力矩Tc主要由圖1所示的磁力矩器產生的磁矩M=[MxMyMz]及地球磁場強度B=[BxByBz]作用產生,見式(1)。
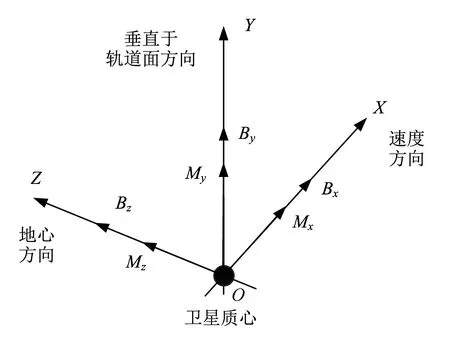
圖1 衛星本體坐標系下磁矩及磁感應強度分解
(1)
由于太陽同步軌道By較小,產生X軸(滾動軸)控制力矩主要依靠Y軸(俯仰軸)磁棒的磁矩My和Z軸(偏航軸)磁場強度Bz。因此,通過My和Bz控制X軸干擾力矩引起的姿態和角速度超差,而Y軸和Z軸干擾力矩引起的姿態和角速度超差采用輪控。
若已知衛星的姿態偏差e和角速度偏差ω,采用PD控制算法,則三軸控制力矩可表示為
Tc=-Kpe-Kdω
(2)
式中:比例系數Kp=[KpxKpyKpz]T;微分系數Kd=[KdxKdyKdz]T。
Tc確定后,由地磁場強度B及組合控制矩陣Λ(b),可確定磁力矩器三軸控制磁矩為
Mc=BΛ-1(b)Tc/‖B‖2
(3)
式中:地磁場強度單位矩陣b=B/‖B‖。
由式(3)得Mc,則三軸磁力矩器控制磁電流Ic可由式(4)[10]得到。
(4)
式中:μe為磁棒有效磁導率;N為線圈匝數;l為磁棒長度;V為磁棒體積。
1.2 姿態機動模式下PID輪控
PID控制算法是將偏差的比例(P)、積分(I)和微分(D)通過線性組合構成控制量,對被控對象進行控制[11]。姿態機動采用飛輪PID控制算法,控制律如下。
(5)
式中:積分系數Ki=[KixKiyKiz]T;φ,θ,ψ分別為滾動角、俯仰角和偏航角;t0為控制開始時刻。
飛輪采用開環+閉環的姿態機動模式,如圖2所示。接收到姿態機動控制角a時,首先進行開環運行,飛輪以一定的速率先加速運行至a/2,然后以同樣的速率減速運行,減速時間與加速時間相同;開環結束后,在正常穩態(包括零姿態和偏置姿態)接入飛輪PID閉環控制,用于消除開環控制的姿態誤差,并維持姿態穩定。非機動軸(俯仰軸和偏航軸)始終采用飛輪PID控制算法。
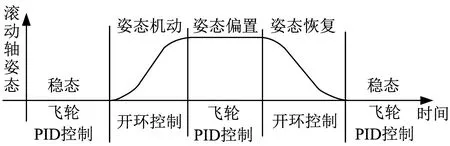
圖2 滾動軸機動和穩態控制示意
1.3 姿態控制方式切換
滾動軸姿態機動結束恢復至零姿態后,在滾動角及角速度小于一定值時接入滾動軸磁控;磁控狀態下,滾動軸飛輪處于不工作狀態,保持零轉速;若滾動軸磁控姿態超差或者偏航軸飛輪轉速偏高,為確保安全,控制系統將自主切換到三軸飛輪PID控制;磁控制切換到飛輪控制后滿足磁控接入條件時,控制系統又自主切換回磁控。通過增加穩態滾動軸磁控時間,可減少穩態飛輪工作時間。
姿態機動模式仍采用開環+閉環形式,開環控制結束后接入單飛輪PID控制,用于消除開環控制的姿態誤差并維持偏置姿態穩定,見圖3。非機動軸(俯仰和偏航軸)控制算法不變,仍為飛輪PID控制。穩態下,滾動軸磁力矩器和飛輪聯合控制接入流程見圖4。
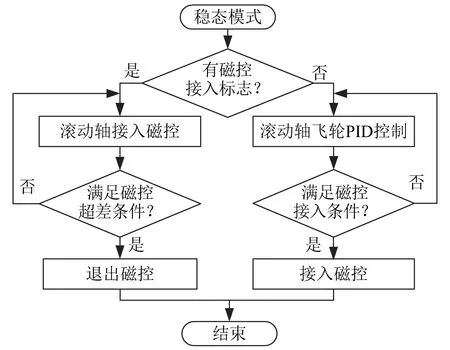
圖4 穩態模式下磁控與飛輪聯合控制切換流程
1.4 磁控接入條件分析
由于地磁場強度B在衛星本體坐標系中的表達式是相當復雜的,因此采用磁控未必總能得到理想的控制力矩Tc。穩態控制的目的主要是克服內外干擾力矩對衛星姿態的影響,對于滾動軸磁控,地磁場強度與衛星本體滾動軸夾角存在接近0°情況,即B與衛星本體滾動軸平行(升降交點附近),此時無法產生滾動方向理想磁控力矩,在干擾力矩作用下,姿態誤差變大。
滾動軸磁控62 400 s的數學仿真結果如圖5所示。滾動姿態誤差變大是在地磁場強度與衛星本體滾動軸夾角接近0°時,此時無法產生該滾動方向理想磁控力矩,在干擾力矩作用下,滾動姿態出現較大姿態控制誤差。
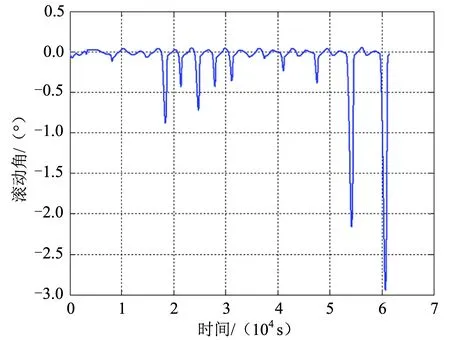
圖5 滾動角磁控曲線
綜上分析,由于磁力矩器的磁矩較小,磁控力矩較弱,地磁場強度復雜,升降交點附近不能產生滾動軸理想的控制力矩,因此,為確保衛星安全,需要在地磁場強度與滾動軸夾角較大時接入磁控,同時要具備穩態磁控時姿態超差退回輪控的能力。
2 仿真分析
設置具體的磁控接入對應的滾動角及角速度大小,對磁輪聯合控制方法進行地面仿真分析,以驗證穩態模式下滾動軸磁控和飛輪控制自主切換功能,仿真結果如圖6~8所示。穩態模式下,滾動軸采用磁控,俯仰軸、偏航軸采用輪控;磁控制狀態下,滾動軸飛輪保持零轉速,均為不工作狀態;假設磁控接入條件為衛星滾動角小于6°,滾動角速度小于0.02(°)/s。通過判斷滾動角及角速度大小,穩態滾動磁控與輪控能夠實現自主切換,切換輪控后可恢復到衛星上原來的三軸飛輪PID控制模式,輪控穩定后,判斷姿態滿足設定條件,因此又恢復磁控狀態。
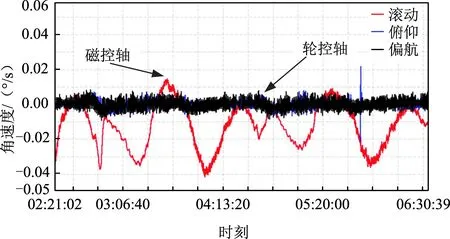
圖6 穩態控制三軸姿態曲線

圖7 穩態控制飛輪轉速曲線
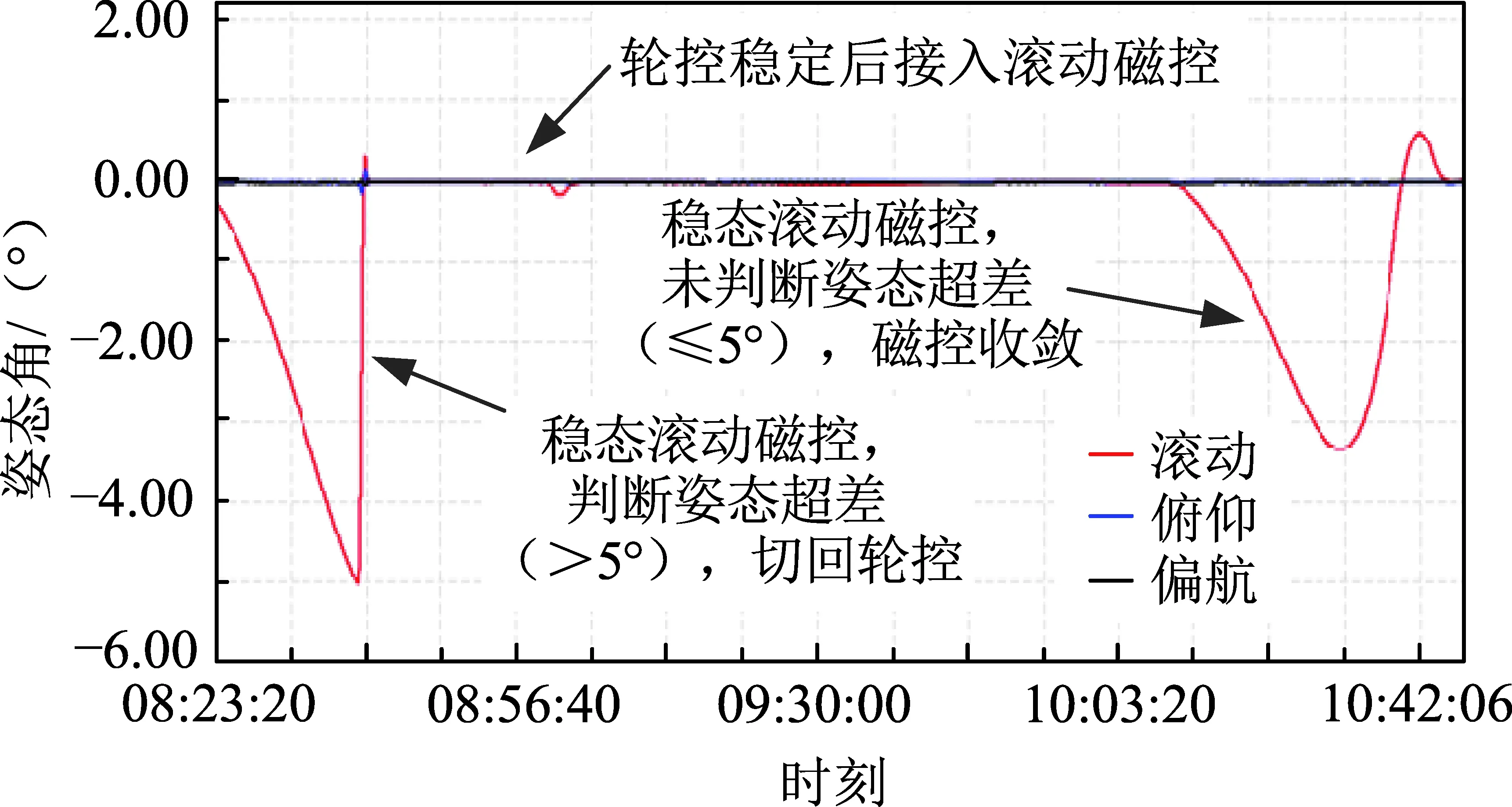
圖8 穩態控制滾動磁控與輪控自主切換Fig.8 Autonomous switching of flywheels and magnetorquer in steady state rolling control
3 在軌驗證
以某在軌衛星為例,對本文提出的延壽方法進行驗證。該衛星采用零動量輪控的姿態控制方式,控制系統共配置6臺飛輪,在衛星上的安裝位置如圖9所示。在正常穩態工作時,啟用Xa,Ya,Za主份飛輪工作;當滾動軸進行姿態機動時,同時啟用滾動軸的Xa和Xb飛輪進行姿態機動。該衛星在軌期間Xa和Xb主備份飛輪出現電流、溫度小幅增大趨勢,經分析發現是因為飛輪保持架問題導致軸承摩擦力矩增大。將本文方法應用于此在軌衛星,磁控實施前后飛輪轉速變化如圖10所示。由圖10可知:磁控接入前,在軌穩態運行采用飛輪PID控制,轉速在150 r/min以內;實施磁控后,滾動軸Xa飛輪轉速始終為0 r/min,俯仰軸Ya飛輪、偏航軸Za飛輪轉速在50 r/min以內,表明衛星滾動軸(X軸)始終處于磁控模式下,沒有切換到輪控模式,同時衛星滾動軸姿態角始終小于6°,三軸角速度始終小于0.02(°)/s,分別如圖11和圖12所示。
穩態情況下,滾動軸飛輪停轉后,飛輪電流為0,Xa飛輪溫度開始下降,穩定于16°左右。磁控前后Xa飛輪電流、溫度變化如圖13所示,磁控前電流、溫度緩慢增大,磁控接入后,由于飛輪不工作,電流、溫度迅速下降,并趨于穩定。
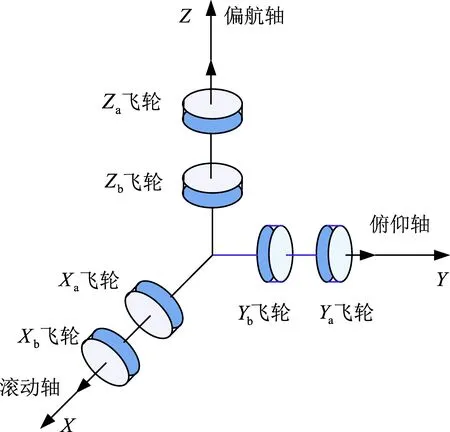
圖9 飛輪配置示意

圖10 磁控實施前后飛輪轉速變化曲線Fig.10 Speed change curve of flywheel before and after magnetic control implementation
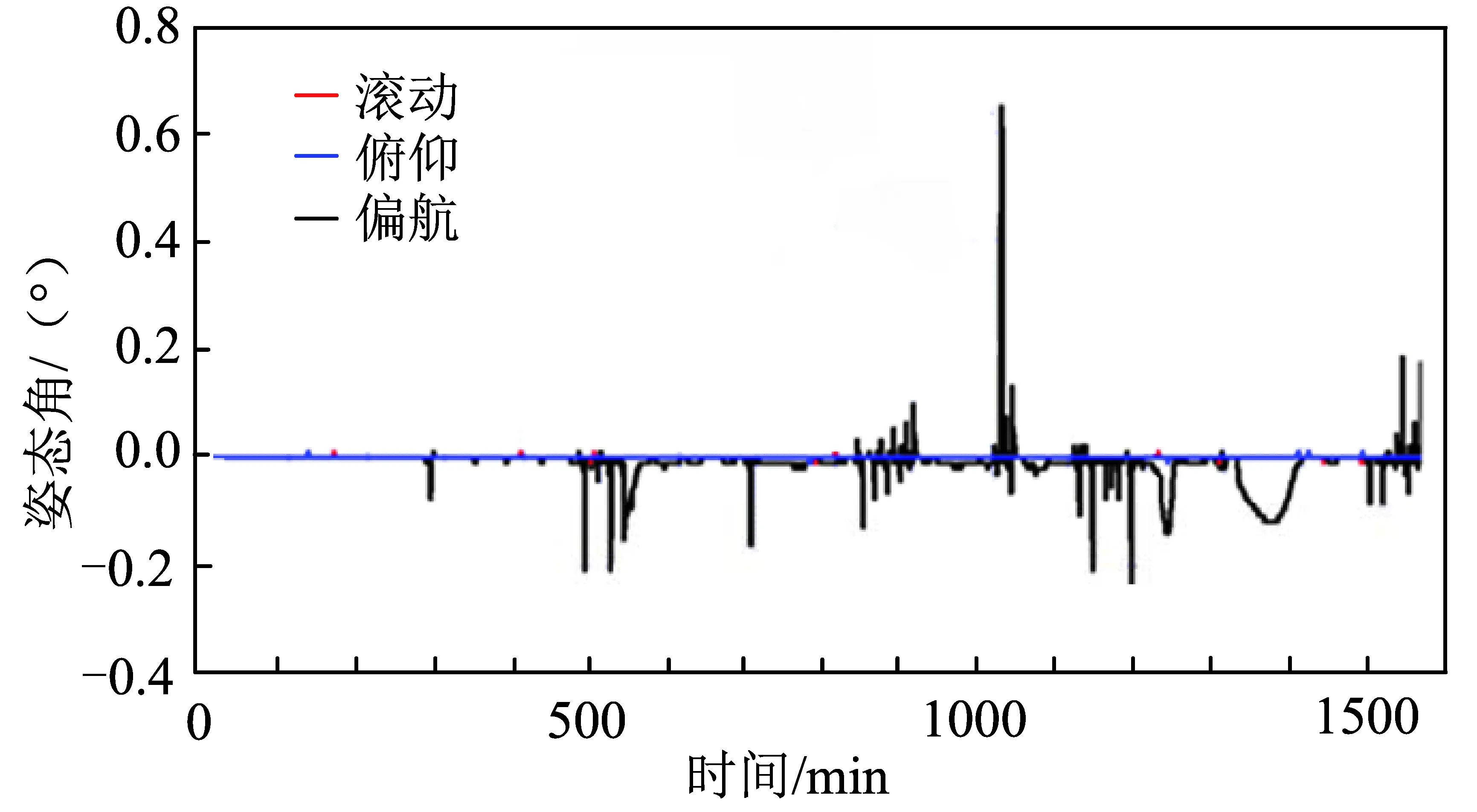
圖11 穩態飛行情況下衛星三軸姿態角遙測曲線Fig.11 Telemetry curve of three-axis attitude anglein satellite steady state flight
穩態情況下,實施磁控前,磁電流不為0,磁電流與磁場相互作用產生的磁力矩用于飛輪卸載,其目的是把飛輪轉速維持在設定的閾值附近。實施磁控后,滾動軸飛輪停轉,轉速電流均為0,完全不產生作用力矩,僅靠磁力矩來抵消空間環境干擾力矩,所以滾動軸較實施磁控前需要較大磁力矩。滾動軸磁力矩靠俯仰軸和偏航軸磁棒產生(磁力矩的方向垂直于磁電流和磁場強度所在的平面),實施磁控后,俯仰軸和偏航軸磁棒磁電流會增大,由于環境干擾力矩是周期性的,因此磁電流也是周期性變化的,如圖14所示。
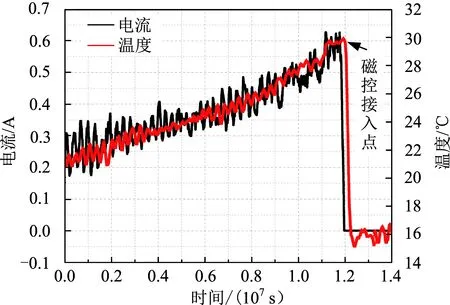
圖13 磁控實施前后Xa飛輪電流、溫度變化曲線
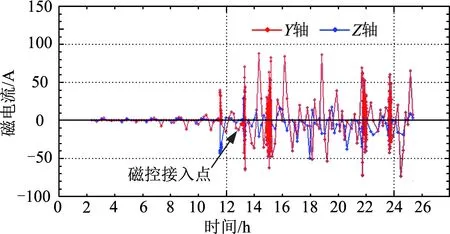
圖14 磁控實施前后磁棒電流變化曲線Fig.14 Change curve of magnetic bar current before and after magnetic control implementation
磁輪聯合控制方法實施以后,衛星遙測數據顯示,滾動軸姿態超差最大約2.6°,且絕大部分時間均小于1°,衛星穩態情況下沒有自主切換回PID輪控方式,與數學仿真結果一致。同時,實施磁輪聯合控制以前,飛輪1天(24 h)一直處于工作狀態,實施磁輪聯合控制后,衛星遙測數據顯示,飛輪工作電流、溫度均在門限值內,1天平均工作時間為56 min,可見飛輪工作時間顯著減少,飛輪壽命得到延長。
4 結束語
本文提出的應用磁輪聯合控制的飛輪延壽方法,可實現衛星的三軸穩態控制,滾動角采用俯仰軸磁矩和偏航軸方向的磁場分量控制,俯仰軸和偏航軸仍采用飛輪PID控制方式。在軌衛星飛輪性能下降后,控制系統在穩態接入磁控,在姿態機動過程中和滾動角超過設定閾值后,衛星三軸仍采用PID輪控方式。衛星滾動軸采用磁控方式后,大大減少飛輪工作時間,飛輪狀態有所恢復,控制系統所采用的策略可以延長飛輪在軌使用壽命,對其他采用輪控的在軌衛星,在飛輪性能退化情況下延長其使用壽命具有一定借鑒意義。