基于溫度模型的10 N推力器點火異常發現方法
2019-03-06 01:13:06
航天器工程 2019年1期
(北京空間飛行器總體設計部,北京 100094)
目前我國中高軌道在軌衛星推進系統大多采用雙組元統一推進系統[1-2],10 N推力器是該類型推進系統中提供推力的唯一執行部件,其工作正常與否直接決定了衛星軌道或者姿態控制的成敗。現今主要通過兩種手段開展10 N推力器的狀態監測:通過衛星姿態角變化進行監測;通過控后測軌結果進行評估。上述兩種手段均存在不足:①一般地,衛星成對推力器的推力存在差異,正常情況下采用成對推力器點火也會引起姿態波動,并且在推力器點火過程中如果衛星動量裝置參與姿態控制,則推力器噴氣產生的干擾力矩會逐漸被動量裝置吸收[3-6],推力器異常工況無法完全反映到姿態波動上,因此采用姿態角變化監測方法無法發現引起姿態波動與正常情況姿態波動差異不明顯的推力器異常工況。②采用控后測軌結果評估10 N推力器工作情況,考慮到精確的測軌結果通常滯后于軌控任務,該方法無法在第一時間發現推力器工作的異常。例如某通信衛星某次軌控10 N推力器發生故障,在軌道控制過程中,對衛星姿態角進行監測,未發現異常,但控后通過測軌發現軌道未達到預期目標,進一步分析確定10 N推力器異常,后續通過補控使衛星軌道達到預期目標,但延長了衛星的軌控時間,影響了衛星點波束天線等有效載荷的正常使用。因此,需要尋找一種方法解決10 N推力器異常發現不及時的難題。
10 N推力器溫度是可以實時全面表征推力器工作正常與否的重要參數。無論是貯箱問題,還是10 N推力器自身問題,甚至是電磁閥管路問題,其直接表現均為推力大小出現異常波動或推力減小,最終均能通過10 N推力器溫度表征。此外,10 N推力器溫度變化趨勢也是反映推進劑是否排空或變為單組元的直接判據,是監測管理壽命末期衛星的重要依據。然而,目前中高軌衛星在軌管理缺少對10 N推力器溫度的精細化定量研究。因此,本文在開展10 N推力器溫度精細化定量研究的基礎上,提出一種在軌衛星10 N推力器點火異常發現方法,以快速及時發現10 N推力器工作異常。
本文研究了10 N推力器熱平衡模型修正方法和采用歷史遙測數據計算模型參數的方法,可用于10 N推力器點火異常檢測及預警。
1 10 N推力器點火異常發現方法
10 N推力器點火異常發現方法基本思想是基于10 N推力器熱平衡方程,結合歷史遙測數據,構建10 N推力器點火溫度包絡線物理模型;然后,以10 N推力器點火起始溫度作為10 N推力器點火溫度包絡線物理模型的初始溫度,通過反復迭代,計算得到從點火至熄火時間范圍內的10 N推力器點火溫度包絡線,最后,通過實時判定10 N推力器實測點火溫度是否在包絡線范圍內,實現10 N推力器點火異常的快速發現。該方法具體步驟如圖1所示。

圖1 10 N推力器點火異常發現方法Fig.1 A detection method for 10N thruster ignition abnormal
2 10 N推力器點火溫度包絡線物理模型構建
2.1 建立10 N推力器熱平衡方程
影響10 N推力器溫度的決定因素主要包括:空間外熱流(包括太陽翼紅外熱流及衛星本體遮擋等)、10 N推力器加熱器通斷狀態、推進劑燃燒所產生的熱耗和測溫熱敏電阻特性(精度及遙測分層值誤差)[1-3,7-8]。若想通過在軌遙測數據將所有因素一一剝離,得到10 N推力器點火溫度的精確數學模型是極難實現的。本文將10 N推力器假設為均溫物體,即10 N推力器各部分的比熱容C相同,空間外熱流僅考慮太陽光照,同時考慮推進劑燃燒、加熱器加熱及10 N推力器向深冷空間的熱輻射,根據熱力學定律建立10 N推力器的熱平衡方程[9-12]
σεAT4
(1)
式中:M為10 N推力器質量(kg);C為10 N推力器平均比熱容(J·kg-1·℃-1);t為10 N推力器的點火時間(s);T為10 N推力器t時刻的平均溫度(K);Qsun(t)是時間t的函數,為t時刻吸收空間外熱流(僅考慮太陽光照)產生的10 N推力器吸熱功率(W);Qpropellant近似為常值,為吸收推進劑燃燒熱量產生的10 N推力器吸熱功率(W);Qheater近似為常值,為吸收加熱器加熱熱量產生的10 N推力器吸熱功率(W);A為10 N推力器的表面積(m2);ε為10 N推力器表面發射率,無量綱;σ為斯蒂芬-波爾茲曼常數(W·m-2·K-4)。
對式(1)進行離散化,令
(2)
可得
T(t+Δt)=T(t)+ΔTsun(t,t+Δt)+
(3)
易知ΔTsun(t,t+Δt)為時間的函數,ΔTpropellant、ΔTheater為常值。
2.2 模型修正
T(t+Δt)=T(t)+ΔTsun(t,t+Δt)+
(4)
2.3 誤差選取及模型構建
考慮到測溫熱敏電阻特性,即精度、遙測分層值誤差和衛星姿態抖動等造成的太陽光照條件等因素變化,10 N推力器實際溫度與由式(4)計算的理論值存在一定誤差,引入誤差δ,一般地δ可根據衛星歷史數據選擇3~5 ℃,則10 N推力器點火溫度包絡線模型為
(5)
式中:Tupper表示上限,Tlower表示下限。
3 工程實施方法
1)選取時間步長Δt
根據熱敏電阻的靈敏度、衛星遙測參數下傳的時間間隔及衛星在軌遙測數據,選擇時間步長Δt。要求Δt滿足:10 N推力器溫度變化一個分層值的時間<Δt<10 N推力器溫度變化二個分層值的時間。后續在10 N推力器溫度在軌遙測數據選擇時,時間步長為Δt。
2)通過擬合求取常值系數σεA/(MC)
3)擬合推進劑燃燒產生的溫度增量ΔTpropellant和修正系數μ
4)擬合加熱器加熱產生的溫度增量ΔTheater

5)計算太陽光照產生的溫度增量ΔTsun(t,t+Δt)
選擇同時滿足10 N推力器未點火、受太陽光照和加熱器未加熱3個條件的,最近一個太陽光照周期(光照周期為n秒),10 N推力器溫度在軌遙測數據
T(t-n+Δt)=T(t-n)+ΔTsun(t-n,
(6)
計算得出ΔTsun(t-n,t-n+Δt)。
根據光照周期特點易知,ΔTsun(t,t+Δt)=ΔTsun(t-n,t-n+Δt)。
綜上,可得到10 N推力器點火溫度物理模型,再根據實際情況確定模型誤差后,則可得到10 N推力器點火溫度包絡線物理模型。
4 案例應用
以東三平臺某地球靜止軌道衛星向西位置保持過程中點火工作的10 N推力器4A為例開展案例應用。該衛星推進系統采用雙組元統一推進系統,且推力器采用恒定脈寬或連續方式點火。點火過程中,4A推力器不受照,即無需計算太陽光照產生的溫度增量ΔTsun(t,t+Δt)。
10 N推力器點火異常發現方法具體應用步驟如下:
(1)根據熱敏電阻的靈敏度、衛星遙測參數下傳的時間間隔及衛星在軌遙測數據,選擇時間步長Δt=24 s。即后續在10 N推力器溫度在軌遙測數據選擇時,時間步長為24 s。
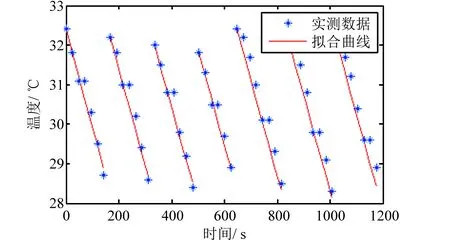
圖2 符合工況1時的10 N推力器實際溫度及擬合曲線Fig.2 Actual temperature and fitting curve for 10N thruster according with rule 1
(3)選取最近一次,不受太陽光照,推力器加熱器斷開(工況2)的10 N推力器點火溫度正常變化的在軌遙測數據,將點火初期1.5 min的10 N推力器點火溫度數據去掉,如圖3所示。應用公式T(t+Δt)=T(t)+ΔTpropellant-2.858×10-12×μ[T(t)]4Δt擬合推進劑燃燒產生的溫度增量ΔTpropellant和修正系數μ。擬合曲線如圖3所示,ΔTpropellant=4.427,μ=4.003,擬合最大誤差為-1.68 ℃。
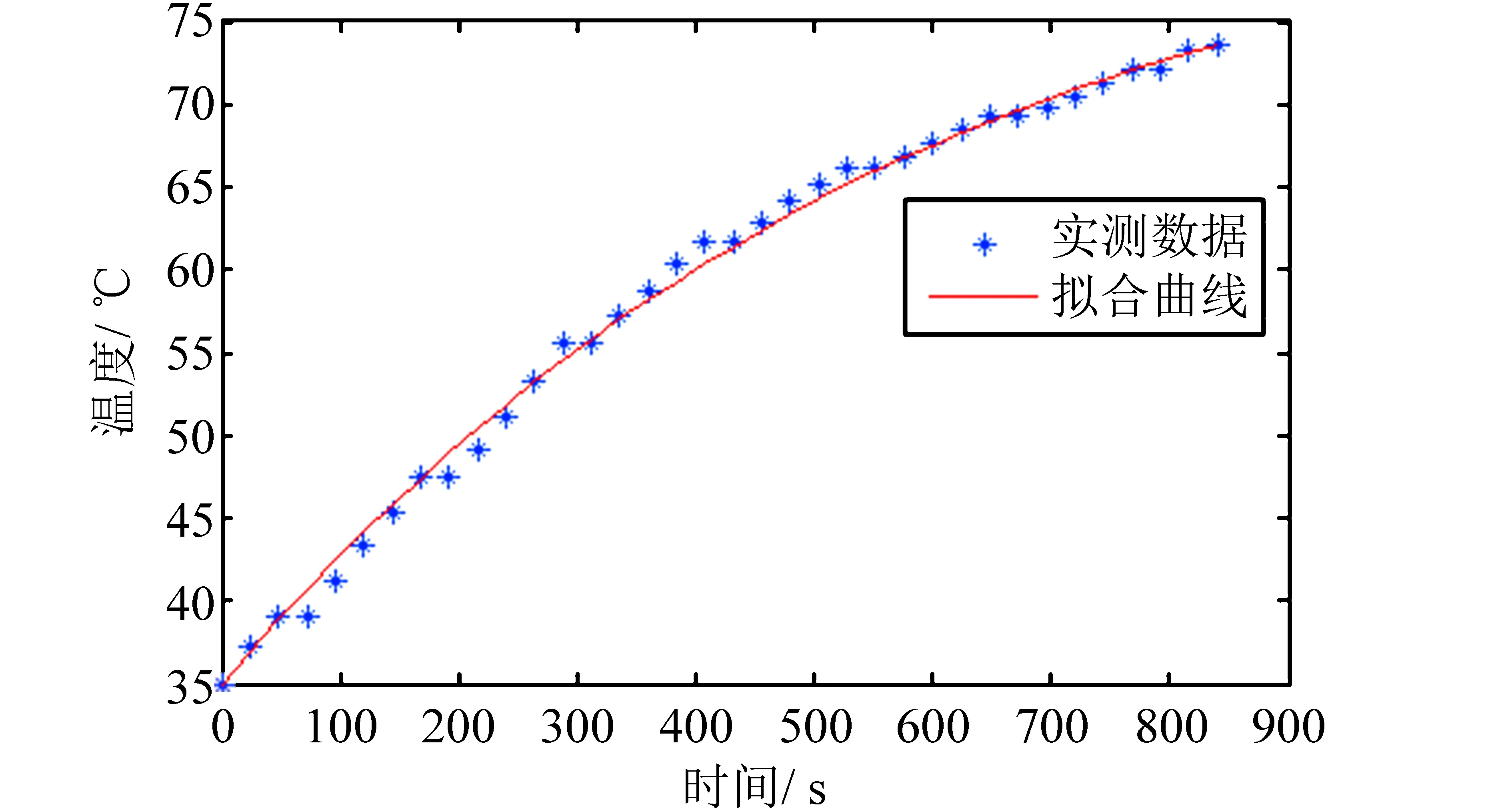
圖3 符合工況2時的10 N推力器實際溫度及擬合曲線Fig.3 Actual temperature and fitting curve for 10N thruster according with rule 2
(4)選擇最近一個軌道周期,不受太陽光照,推力器加熱器閉合,并且推力器未點火工作(工況3)的10 N推力器溫度在軌遙測數據,連續選擇6組,按時間先后順序連接起來如圖4所示。對所選6組數據,利用公式T(t+Δt)=T(t)+ΔTheater-2.858×10-12×[T(t)]4Δt擬合加熱器加熱產生的溫度增量ΔTheater。擬合曲線如圖4所示,加熱器加熱產生的溫度增量ΔTheater=1.198,擬合最大誤差為-1.01 ℃。
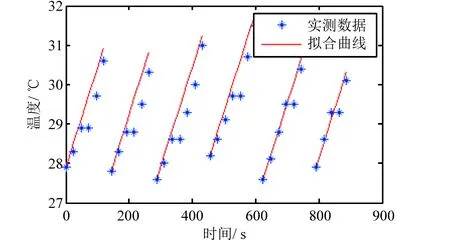
圖4 符合工況3時的10 N推力器實際溫度及擬合曲線Fig.4 Actual temperature and fitting curve for 10N thruster according with rule 3
由步驟(1)~(4)可知,4A推力器點火溫度計算模型為
T(t+24)=T(t)+4.427+1.198×Sheater-
2.746×10-10×[T(t)+273]4
(7)
式中:Sheater表示4A推力器加熱器狀態;Sheater=1表示加熱器處于加熱狀態;Sheater=0表示加熱器處于斷開狀態。
應用式(7)計算4A推力器點火溫度理論值,進行推力器異常診斷,如圖5所示,與實測溫度比較,理論值與實測值最大差值為2.72 ℃,滿足3~5 ℃的誤差要求,表明4A推力器點火工作正常。

圖5 4A推力器點火實際溫度及擬合曲線Fig.5 True firing temperature and fitting curve for 4A thruster
若本案例中的4A推力器點火過程中受太陽光照,則選取最近一個太陽光照周期的10 N推力器溫度數據,采用式(6)即可計算得到太陽光照產生的溫度增量,然后結合式(7)即可實現受太陽光照情況下的4A推力器點火異常檢測。
綜上,本文所提方法實現了10 N推力器的精細化診斷。如圖6所示,對于10 N推力器點火溫度異常①,當采用不超出設計門限10~120 ℃的溫度范圍進行診斷時,診斷結果為正常,而采用本文所提方法進行診斷時,則可在10 N推力器點火溫度超出理論點火溫度5 ℃時即可快速診斷為異常,有效避免了異常的漏報;而對于10 N推力器點火溫度異常②,雖然當溫度超出120 ℃時采用設計門限能夠發現該異常,但缺乏及時性,對于溫度敏感的設備,可能會導致設備損傷,而采用本文所提方法進行診斷,能夠在溫度不損傷設備的前提下提前100 s發現異常,消除了設計門限發現不及時導致設備損傷的風險。
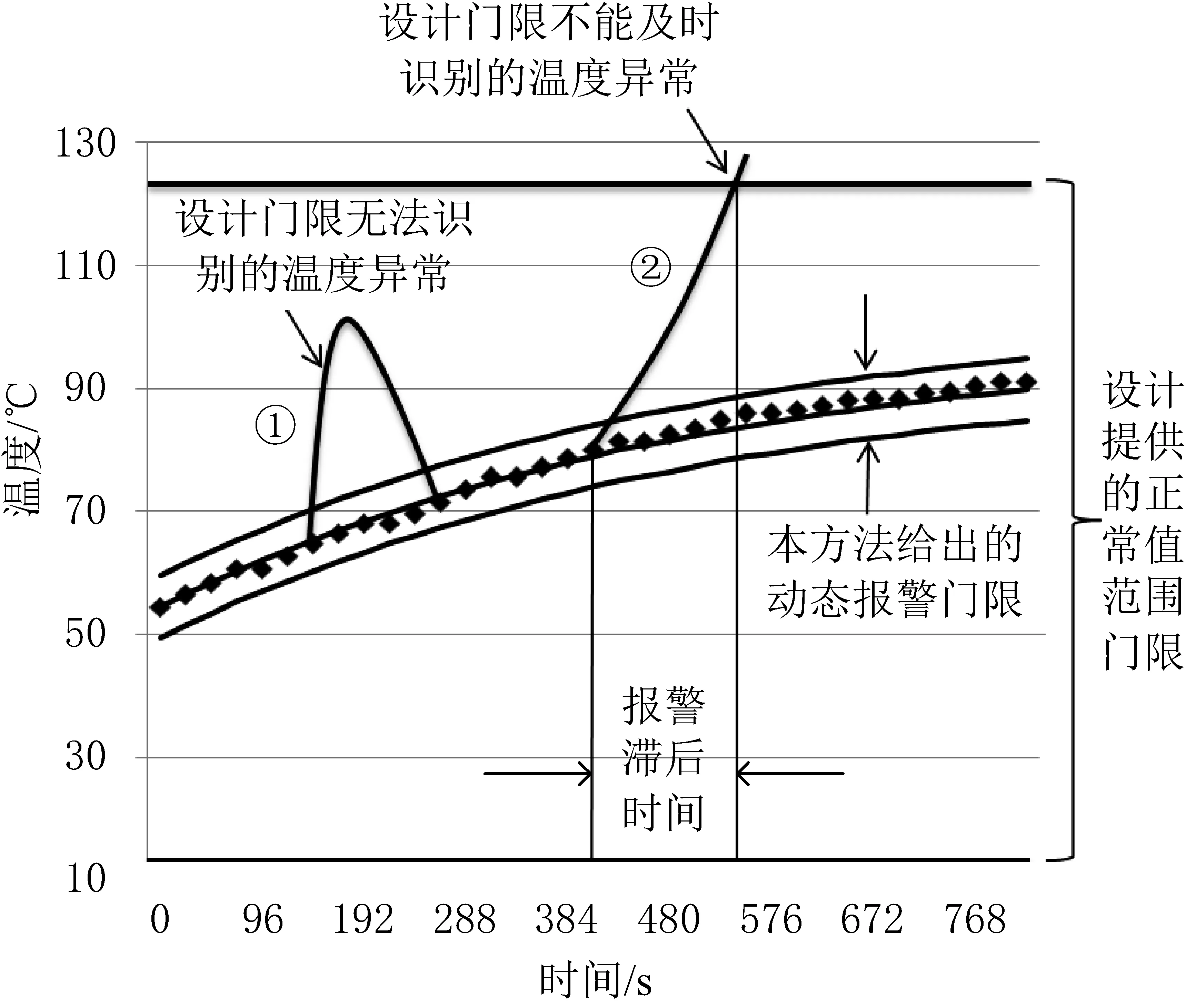
圖6 可識別的10 N推力器溫度異常
5 結束語
本文通過對10 N推力器點火溫度精細化建模,提出了一種10 N推力器點火異常實時發現方法,實現了10 N推力器點火異常定量化診斷。特別地,本文所提方法適用于軌道具有周期性變化特點、采用雙組元統一推進系統的所有衛星10 N推力器的異常發現,并且對10 N推力器的位置無限制條件,10 N推力器的位置差異表現為所提方法中擬合參數的差異。該方法克服了傳統的人工經驗診斷或者門限診斷存在的異常發現不及時的問題,特別是在衛星軌道控制過程中,及時發現10 N推力器點火異常,對于軌控策略的快速修正及保證軌控任務的圓滿成功具有重要意義。然而,本文所提方法仍存在一定的局限性,當10 N推力器點火不連續或者采用變脈寬方式點火工作時,無法實現推力器點火異常的實時發現,該問題有待進一步深入研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56