嫦娥衛(wèi)星數(shù)傳副瓣信號的干涉測量研究與精度驗證
2019-03-07 01:41:02任天鵬謝劍鋒路偉濤韓松濤
載人航天 2019年1期
任天鵬,謝劍鋒,路偉濤,陳 略,韓松濤
(1. 北京航天飛行控制中心,北京 100094; 2. 航天飛行動力學技術重點實驗室,北京 100094)
1 引言
深空探測器軌道測定主要依靠測距、測速和測角等三種手段,甚長基線干涉測量(Very Long Baseline Interferometry,VLBI)是其中主要的測角手段[1]。通常,VLBI的觀測量是群時延,通過相關相位除以干涉帶寬得出[2]。干涉帶寬即干涉信號在頻譜上分布的最大帶寬。嫦娥一號與嫦娥二號衛(wèi)星使用了間距20 MHz的雙頻點VLBI信標,每個頻點的帶寬為1 MHz;嫦娥二號衛(wèi)星實驗、嫦娥三號衛(wèi)星正式使用了最大間距為38 MHz的差分干涉測量(Differential One-way Range,DOR)信號,可得到隨機誤差為0.1 ns量級的干涉群時延結果[3]。
VLBI時延除了隨機誤差,還要消除大氣、電離層和觀測裝置時延等系統(tǒng)性誤差。為此,需通過交替觀測探測器和鄰近射電源,即ΔVLBI技術[4]。如果探測器干涉測量采用DOR信號,又稱為ΔDOR型VLBI技術。嫦娥二號任務利用VLBI信標和DOR信號,分別開展了ΔVLBI與ΔDOR型VLBI實驗,結果表明[5]:采用DOR信號所獲時延數(shù)據比采用VLBI信標所獲時延數(shù)據的噪聲水平有改善。因此在我國后續(xù)月球探測與火星探測衛(wèi)星中,VLBI將選用DOR信號開展干涉跟蹤。
除了VLBI信標和DOR信號,還有探測器向地面發(fā)送的科學數(shù)據,即數(shù)傳信號,可用來進行VLBI測量。但由于數(shù)傳信號主瓣帶寬有限,而且其發(fā)射時間根據有效載荷而定,不一定能夠滿足VLBI測軌需求,因而未作為VLBI主用信號[6]。
后續(xù)月球探測(包括載人登月)任務中,著陸器落月后有效載荷開啟,探測器將發(fā)射數(shù)傳信號。由于數(shù)傳信號可能影響DOR干涉時延的準確性,因此利用數(shù)傳信號代替DOR側音開展干涉測量研究,對探月衛(wèi)星高精度軌道測定具有重要工程價值。同時,首次火星探測中,DOR信號與數(shù)傳信號將分時工作,因此開展數(shù)傳信號干涉跟蹤可直接提高干涉測軌的弧段覆蓋范圍。為此,本文首次將數(shù)傳副瓣信號(泄露頻譜)作為干涉測量對象,開展數(shù)傳信號干涉測量研究,建立數(shù)傳副瓣信號干涉測量優(yōu)化模型,并利用實測數(shù)據驗證比對了數(shù)傳副瓣信號干涉時延與傳統(tǒng)DOR干涉時延。
2 干涉測量原理與誤差建模
2.1 干涉測量原理
干涉測量源于射電天文領域,具有測角精度高、作用距離遠等優(yōu)點,是近年深空導航領研究域的熱點[1]。干涉測量技術基本原理如圖1所示,兩測站接收相同射電源或航天器信號,根據幾何關系,相同信號到達兩測站的幾何時延如式(1):
(1)

圖1 干涉測量基本原理Fig.1 Basic principles of interferometry
式中,B表示兩個測站的基線,θ為方向夾角,c為光速。
2.2 數(shù)傳副瓣信號干涉測量優(yōu)化建模
根據文獻[7],干涉條紋的相位誤差與信噪比成式(2)所示反比關系:
σφ=1/SNR
(2)
由于雙通道干涉時延存在式(3)所示關系,可將雙通道干涉時延誤差表示為式(4):
(3)
(4)
可見,干涉時延誤差與干涉帶寬成反比、與信噪比成反比。
嫦娥一號、嫦娥二號任務采用了帶寬為20 MHz的VLBI信標(圖2),嫦娥二號、嫦娥三號任務采用了帶寬為38.4 MHz的DOR側音信號(圖3)。由于VLBI信標和DOR信號輻射強度及干涉帶寬為固定值,因此干涉測量中不存在優(yōu)化建模需求。然而,隨著數(shù)傳副瓣信號(圖4)干涉帶寬的增加(選取距離主瓣較遠的副瓣作為干涉對象),信號輻射強度隨之下降;單個副瓣信號內,線性增加有效帶寬并不能線性增加信號輻射強度,但是線性增加了處理噪聲。因此,需要對數(shù)傳副瓣信號子瓣有效帶寬、數(shù)傳副瓣信號干涉帶寬等進行優(yōu)化建模。

圖2 VLBI信標信號頻譜Fig.2 Spectrum of VLBI beacon signal
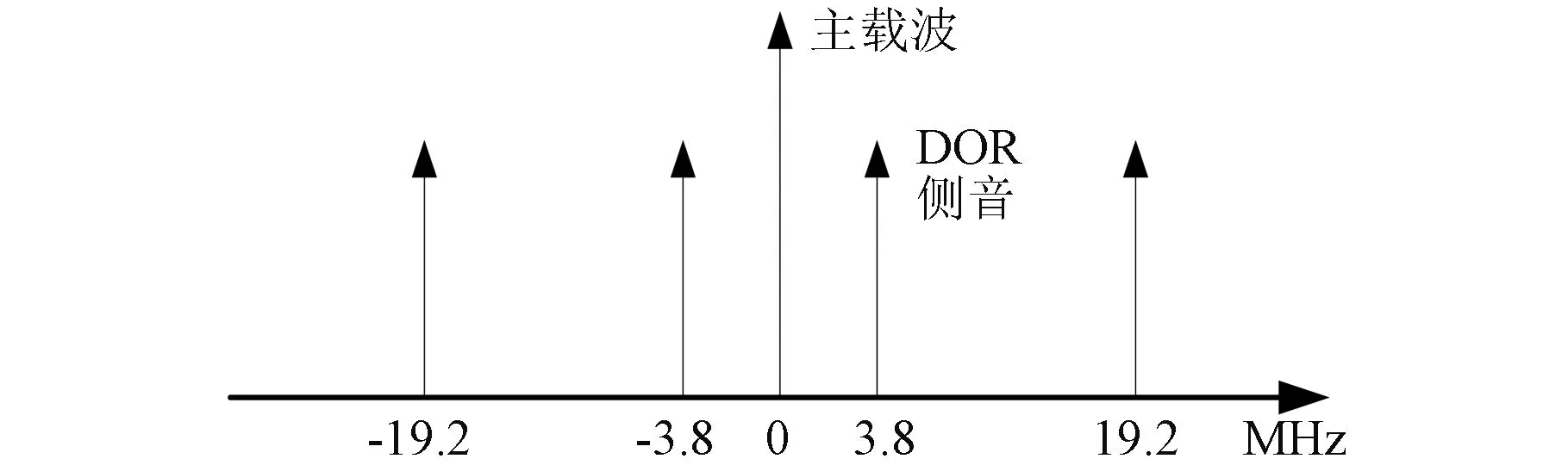
圖3 DOR側音信號頻譜Fig.3 Spectrum of DOR signal

圖4 數(shù)傳信號及其副瓣頻譜Fig.4 Spectrum of data transmission signal and sidelobe signal
2.2.1 數(shù)傳副瓣信號子瓣有效帶寬優(yōu)化
航天器寬帶信號的干涉信噪比可以表示為式(5)[6]:
(5)
其中,B為信號帶寬,eirp表示在帶寬B上分配的有效全向輻射功率(EIRP),snr表示影響SNR且與信號帶寬B獨立的其他因素。
對于單個數(shù)傳副瓣信號,由于其輻射能量在頻譜上并未平坦分布,呈現(xiàn)為中間高邊緣低,因此需要針對單個數(shù)傳副瓣信號,以干涉信噪比最大為目標,建立數(shù)傳副瓣信號子瓣有效帶寬的優(yōu)化模型如式(6):
(6)
其中,eirpN(B)表示第N個數(shù)傳副瓣在帶寬B上分配的有效全向輻射功率(EIRP)。以嫦娥三號著陸器數(shù)傳副瓣信號輻射強度作為輸入,數(shù)值優(yōu)化結果顯示,針對其第2、3、4、5個副瓣,有效帶寬均取副瓣帶寬的58%時干涉信噪比最大(圖5)。穩(wěn)妥起見,后續(xù)分析及實測數(shù)據處理中,副瓣有效帶寬均取副瓣帶寬的50%。

圖5 嫦娥三號著陸器數(shù)傳副瓣信號有效帶寬優(yōu)化Fig.5 Optimization of effective bandwidth for data transmission sidelobe signal of Chang′e-3 lander
2.2.2 數(shù)傳副瓣信號干涉帶寬優(yōu)化
為取得較寬的干涉帶寬,需要選取距離主瓣較遠的副瓣作為干涉對象。然而距離主瓣越遠,副瓣輻射強度越弱,信噪比越小。因此需要針對數(shù)傳信號整體,以干涉時延誤差最小為目標,建立數(shù)傳副瓣信號干涉帶寬優(yōu)化模型如式(7):
(7)
其中eirpN(Δf)表示數(shù)傳信號整體分配給干涉帶寬為Δf的數(shù)傳副瓣的EIRP。以嫦娥三號著陸器數(shù)傳信號輻射強度在不同副瓣的分布作為輸入,數(shù)傳副瓣信號干涉帶寬數(shù)值優(yōu)化結果如圖6所示。可知道,取第4副瓣或第5副瓣的干涉測量誤差相近。穩(wěn)妥起見,后續(xù)實測數(shù)據處理取電平較高的第4副瓣作為干涉對象。

圖6 嫦娥三號著陸器數(shù)傳副瓣信號干涉帶寬優(yōu)化Fig.6 Optimization of interferometric bandwidth for data transmission sidelobe signal of Chang′e-3 lander
3 DOR干涉與數(shù)傳干涉時延驗證比對
利用嫦娥三號(CE03)著陸器下行的DOR信號和數(shù)傳信號開展DOR干涉時延與數(shù)傳干涉時延驗證實驗。CE03著陸器DOR信號包括1個主載波和4個側音,4個側音分別距離主載波±19 MHz、±3.8 MHz;數(shù)傳信號主瓣帶寬及左右對稱的副瓣寬度均取決于碼速率。
不失一般性,DOR信號采用-19 MHz、主載波、+3.8 MHz共3個點頻通道(干涉帶寬約22.8 MHz);數(shù)傳信號采用左4副瓣、主瓣、右4副瓣3個寬帶通道(干涉帶寬約22.5 MHz),其中副瓣有效帶寬取50%。干涉帶寬相仿條件下,分別解算DOR干涉時延與數(shù)傳干涉時延,針對隨機誤差、系統(tǒng)性誤差與穩(wěn)定性(波動誤差)進行分析比對。
3.1 隨機誤差分析比對
利用2017年6月8日CE03著陸器跟蹤數(shù)據,完成干涉測量數(shù)據處理。其中3個點頻通道和3個寬帶通道的信號頻譜與干涉條紋分別如圖7、圖8所示。

圖7 CE03著陸器DOR與數(shù)傳信號頻譜Fig.7 Spectrums of DOR and data transmission signals of Chang′e-3 lander

圖8 CE03著陸器DOR與數(shù)傳信號干涉條紋Fig.8 Interferometric fringes of DOR and data transmission signals of Chang′e-3 lander

圖9 DOR信號、數(shù)傳主瓣、數(shù)傳第4副瓣干涉時延Fig.9 Interferometric delays of DOR, data transmission mainlobe and sidelobe signals
可以看出,CE03數(shù)傳信號泄露頻譜左4副瓣和右4副瓣干涉條紋亦比較明顯,說明其能量足夠提取高精度干涉時延結果,可以支撐干涉測量需求。利用實測數(shù)據解算干涉時延結果,如圖9所示。可以知道:
1) DOR信號通道(-19 MHz、主載波、+3.8 MHz)干涉帶寬約22.8 MHz,干涉時延隨機誤差(STD)約為0.17 ns;
2) 數(shù)傳主瓣通道干涉帶寬約2 MHz,干涉時延隨機誤差(STD)約為0.79 ns;
3) 數(shù)傳通道(左4副瓣、主瓣、右4副瓣)干涉帶寬約22.5 MHz,干涉時延隨機誤差(STD)約為0.02 ns。
上述實測結果與理論分析相符:由于干涉帶寬較寬,數(shù)傳干涉時延隨機精度優(yōu)于數(shù)傳主瓣干涉時延隨機精度;由于信噪比較高,數(shù)傳干涉時延隨機精度優(yōu)于DOR干涉時延隨機精度。
3.2 系統(tǒng)性誤差分析比對
由于DOR干涉時延與數(shù)傳干涉時延采用不同的通道進行帶寬綜合,因此其時延值必定存在一定的差異。而經過射電源差分消除通道間時延差異后,理論上DOR干涉時延與數(shù)傳干涉時延將相同。基于該原理,本節(jié)將利用2018年3月31日與4月1日的CE03著陸器干涉跟蹤數(shù)據,分別解算基于射電源差分的DOR干涉時延和數(shù)傳干涉時延,進而評估其系統(tǒng)性誤差。
2018年3月31日的干涉時延、差分干涉時延如圖10、圖11所示,2018年4月1日的干涉時延、差分干涉時延如圖12、圖13所示。藍色是DOR通道干涉時延,紅色是數(shù)傳通道干涉時延。可以看出,利用射電源差分觀測后,DOR干涉時延與數(shù)傳干涉時延基本吻合。

圖11 2018年3月31日嫦娥三號差分干涉時延(較短紅色為數(shù)傳信號,較長藍色為DOR信號)Fig.11 Differential interferometric delays of Chang′e-3 lander on March 31, 2018 (data transmission signal: red and short, DOR: blue and long)

圖12 2018年4月1日嫦娥三號干涉時延(較短紅色為數(shù)傳信號,較長藍色為DOR信號)Fig.12 Interferometric delays of Chang′e-3 lander on April 1, 2018 (data transmission signal: red and short, DOR: blue and long)

圖13 2018年4月1日嫦娥三號差分干涉時延(較的紅色為數(shù)傳信號,較的藍色為DOR信號)Fig.13 Differential interferometric delays of Chang′e-3 lander on April 1, 2018 (data transmission signal: red and short, DOR: blue and long)
3.3 穩(wěn)定性比對
由3.2節(jié)可以知道,射電源差分觀測消除系統(tǒng)性誤差后,DOR干涉時延與數(shù)傳干涉時延基本吻合,然而并不理想。譬如下行數(shù)傳信號階段,DOR干涉時延波動較大;沒有下行數(shù)傳信號階段,DOR干涉時延較為平穩(wěn)。本節(jié)將以干涉相時延為基準,評估DOR干涉時延與數(shù)傳干涉時延的穩(wěn)定性,其原理為:無論群時延還是相時延,均反映了干涉對象的軌道特性,因此群時延與相時延具有一致的趨勢性[8]。由于干涉帶寬寬,干涉相時延具有公認的高精度優(yōu)勢。因此可以以相時延為基準,可以評估DOR干涉時延(群時延)與數(shù)傳干涉時延(群時延)的穩(wěn)定性。
利用2017年6月8日CE03著陸器干涉跟蹤數(shù)據,分別解算DOR信號與數(shù)傳信號的干涉相時延(消除電離層延遲影響),則DOR干涉相時延與數(shù)傳干涉相時延的趨勢如圖14所示。顯然,DOR干涉相時延與數(shù)傳干涉相時延的趨勢幾乎完全相同,表明了相時延較低的測量噪聲、較高的測量精度等優(yōu)勢。
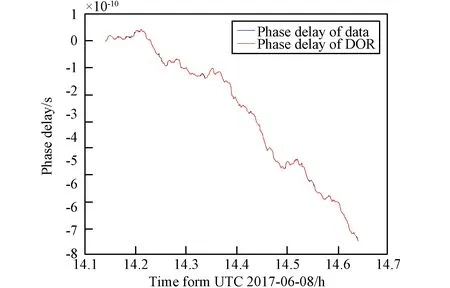
圖14 數(shù)傳干涉相時延(藍色)和DOR干涉相時延(紅色)Fig.14 Phase delays of data transmission signal (blue) and DOR signal (red)
以干涉相時延為基準,分別符合DOR干涉時延和數(shù)傳干涉時延的變化趨勢,如圖15~16所示。直觀而言,數(shù)傳干涉時延與干涉相時延的符合性優(yōu)于DOR干涉時延與干涉相時延的符合性。群時延與相時延的符合差異不同于隨機誤差與系統(tǒng)性誤差,在此稱之為波動誤差。數(shù)據統(tǒng)計結果表明,數(shù)傳干涉時延波動誤差約0.14 ns(STD),而DOR干涉時延波動誤差約0.46 ns(STD),說明數(shù)傳干涉時延的穩(wěn)定性優(yōu)于DOR干涉時延。

圖15 數(shù)傳干涉時延及其干涉相時延(藍色為群時延STD=0.14 ns,紅色為相時延)Fig.15 Interferometric group and phase delays of data transmission signal (group delay: blue with STD=0.14 ns, phase delay: red)

圖16 DOR干涉時延及其干涉相時延(藍色為群時延STD=0.14 ns,紅色為相時延)Fig.16 Interferometric group and phase delays of DOR signal (group delay: blue with STD=0.46 ns, phase delay: red)
4 結論
干涉帶寬相仿條件下,數(shù)傳信號干涉時延隨機誤差約0.02 ns(STD),優(yōu)于DOR干涉時延0.17 ns(STD)的隨機誤差;利用射電源差分觀測后,DOR干涉時延與數(shù)傳干涉時延基本吻合;以干涉相時延為基準,數(shù)傳干涉時延的波動誤差約為0.14 ns(STD),DOR干涉時延的波動誤差約為0.46 ns(STD),說明了數(shù)傳干涉時延的穩(wěn)定性優(yōu)于DOR干涉時延。
因此,在探測器下行數(shù)傳信號的觀測弧段,可以利用數(shù)傳信號代替DOR信號開展干涉跟蹤與測量試驗,以獲取精度更高、穩(wěn)定度更優(yōu)的干涉時延數(shù)據。同時,DOR干涉時延的波動誤差來源有待進一步探究。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00