全數(shù)字交流伺服驅(qū)動器設(shè)計
2019-03-10 03:17:26杜仁慧陶春榮游新望
雷達(dá)與對抗 2019年4期
杜仁慧,秦 雅,陶春榮,游新望
(中國船舶重工集團(tuán)公司第七二四研究所,南京 211153)
0 引 言
隨著艦載雷達(dá)技術(shù)的飛速發(fā)展,對伺服系統(tǒng)的跟蹤精度、轉(zhuǎn)速平穩(wěn)性以及可靠性等提出了更高的要求。這就需要交流伺服驅(qū)動器具有更好的動態(tài)性能、穩(wěn)態(tài)精度、通用性和易用性。交流伺服驅(qū)動器經(jīng)歷了磁放大器控制、晶體管控制、集成電路控制、計算機(jī)控制的發(fā)展過程,如今已經(jīng)進(jìn)入了一個全新的時期,其主要標(biāo)志為數(shù)字信號處理器(DSP)和智能功率模塊(IPM)的出現(xiàn)。這使得交流伺服驅(qū)動器的模塊化和全數(shù)字化得以實(shí)現(xiàn)。[1]
針對電機(jī)控制的DSP具有超強(qiáng)的數(shù)據(jù)處理能力和很快的數(shù)據(jù)處理速度,可用于實(shí)現(xiàn)交流伺服控制的復(fù)雜算法,提高系統(tǒng)的控制精度和可靠性。[2-4]IPM主要功能是利用脈沖寬度調(diào)制(PWM)技術(shù)將直流電逆變成控制電機(jī)的電壓和頻率可調(diào)的交流電,其內(nèi)部集成了IGBT及其驅(qū)動電路,同時具有短路、過流、欠壓和過熱等保護(hù)功能,具有集成度高、保護(hù)功能完善以及可靠性好等優(yōu)點(diǎn)。[5]本文提出了一種基于DSP和IPM的全數(shù)字交流伺服驅(qū)動器設(shè)計,其采用矢量控制算法實(shí)現(xiàn)了電機(jī)的位置、速度和電流全閉環(huán)控制。文中著重闡述了伺服控制單元的軟硬件設(shè)計,并給出了驅(qū)動電機(jī)運(yùn)行的實(shí)驗結(jié)果。
1 伺服驅(qū)動器原理
交流伺服驅(qū)動器的原理框圖如圖1所示,主要由伺服控制單元和功率驅(qū)動單元兩大部分組成。
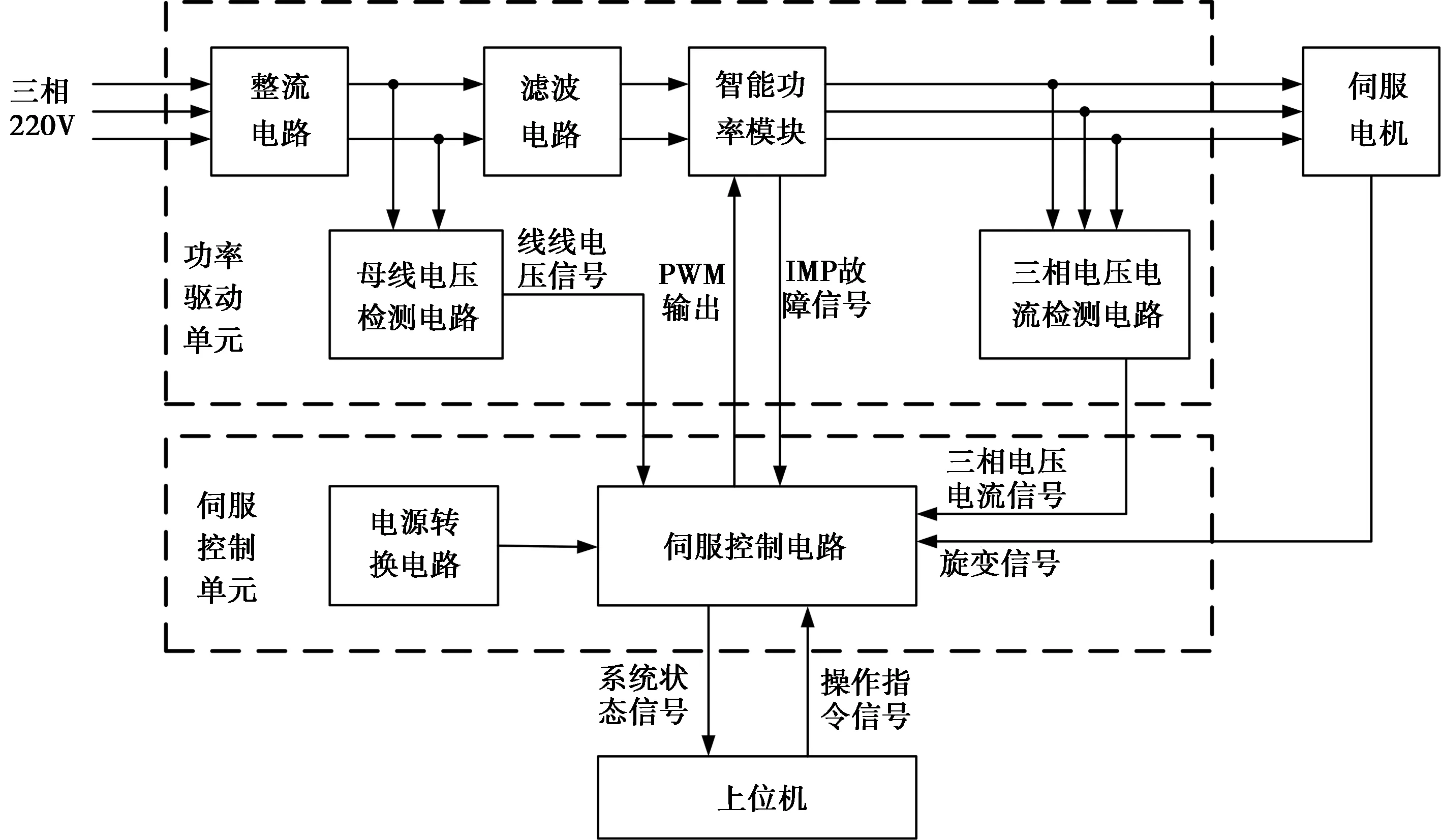
圖1 交流伺服驅(qū)動器原理框圖
伺服控制單元中電源轉(zhuǎn)換電路主要為驅(qū)動器中各模塊提供+5V和±15V電源。伺服控制電路主要接收電機(jī)反饋的旋變信號、三相電壓電流信號,用于電機(jī)控制。接收母線過壓欠壓信號、三相過流信號以及IPM故障信號等實(shí)現(xiàn)故障的檢測保護(hù)。運(yùn)行閉環(huán)控制算法輸出6路PWM信號。
功率驅(qū)動單元主要對輸入的三相交流電進(jìn)行整流濾波,通過智能功率模塊將直流電逆變成具有相應(yīng)幅值和頻率的交流電,從而控制電機(jī)運(yùn)行。檢測母線電壓信號和三相電壓電流信號,用于驅(qū)動器的控制和保護(hù)。
2 伺服控制電路硬件設(shè)計
伺服控制電路是交流伺服驅(qū)動器的核心部分,其主要有以下功能:接收指令信號和反饋信號,運(yùn)行閉環(huán)伺服控制算法,產(chǎn)生PWM輸出信號,控制電機(jī)高性能地運(yùn)行;通過對各種故障信息的實(shí)時檢測和處理,實(shí)現(xiàn)過壓、欠壓、過流以及IPM故障等情況下的保護(hù)。從模塊化設(shè)計的角度考慮,伺服控制電路采用了DSP+FPGA的硬件架構(gòu),其原理框圖如圖2所示。
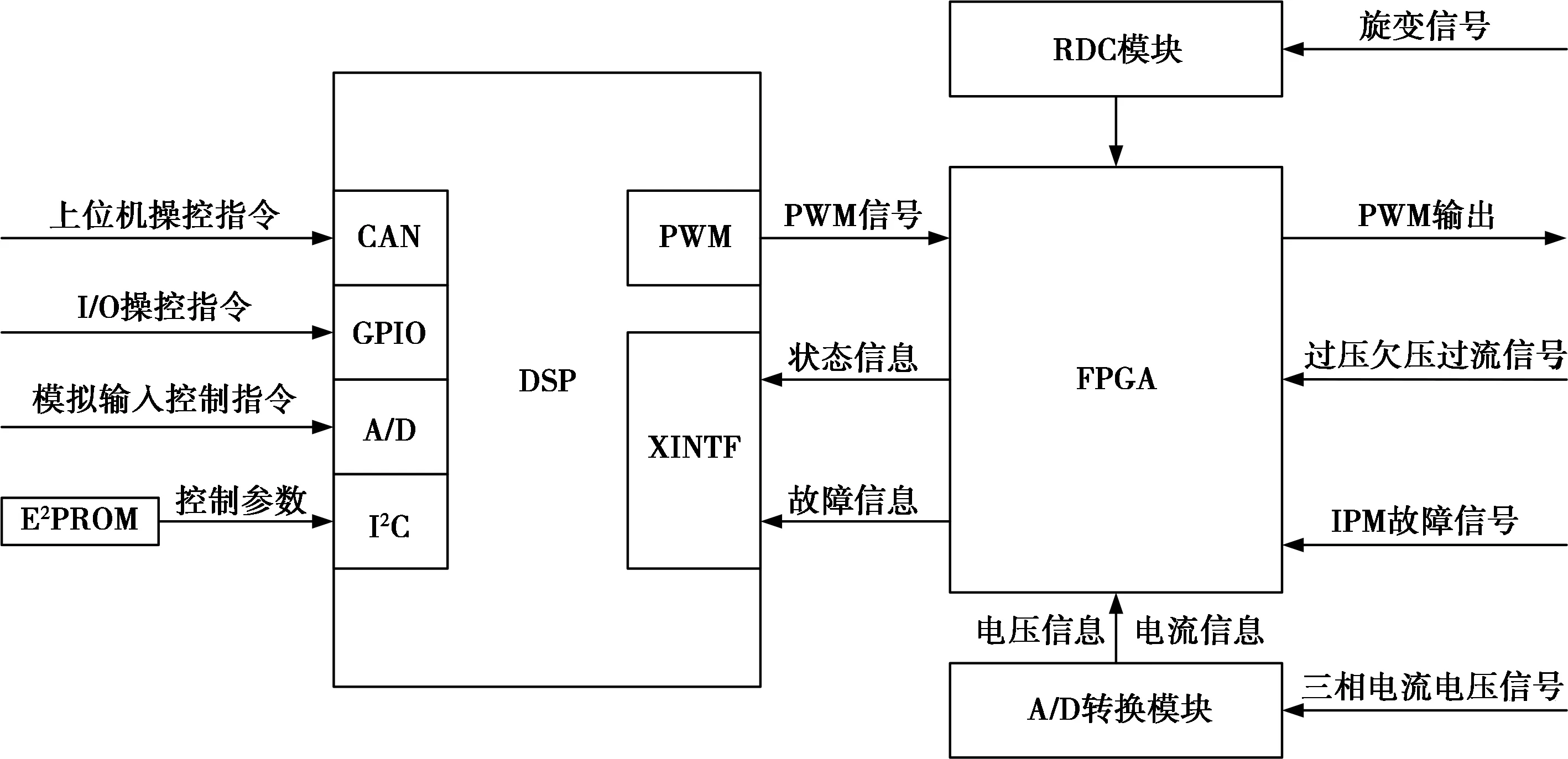
圖2 伺服控制電路原理框圖
DSP芯片主要實(shí)現(xiàn)對電機(jī)的高性能控制,包括以下功能:
(1) 具有32位單精度浮點(diǎn)運(yùn)算單元,能夠處理運(yùn)算量較大的電機(jī)矢量控制算法以及實(shí)時性要求高的信號濾波算法等,實(shí)現(xiàn)對電機(jī)的高性能控制;
(2) 具有eCAN通訊模塊,能夠?qū)崿F(xiàn)與上位機(jī)的通信,接收控制指令并發(fā)送驅(qū)動器的各種運(yùn)行和故障狀態(tài);
(3) 具有多個獨(dú)立可編程的復(fù)用通用輸入輸出接口(GPIO),能夠?qū)崿F(xiàn)對驅(qū)動器的IO操控;
(4) 具有12位的A/D轉(zhuǎn)換器,能夠?qū)崿F(xiàn)模擬量輸入控制;
(5) 具有I2C總線模塊,能夠?qū)崿F(xiàn)與E2PROM通信,存儲驅(qū)動器的控制參數(shù)以及歷史故障;
(6) 具有高分辨脈沖寬度調(diào)制(PWM)模塊,能夠方便地實(shí)現(xiàn)對電機(jī)的PWM控制;
(7) 具有并行總線外部接口(XINTF),能夠?qū)崿F(xiàn)與FPGA芯片通信,接收位置、速度和電流等狀態(tài)信息以及過壓、欠壓、過流和IPM故障等故障信息。
FPGA芯片主要實(shí)現(xiàn)對位置、電壓、電流和故障信號的處理,包括以下功能:
(1) 通過外設(shè)RDC模塊接收并處理電機(jī)的位置信息;
(2) 通過外設(shè)A/D模塊接收并處理電機(jī)的三相電流和三相電壓信息;
(3) 將處理好的狀態(tài)信息和故障信息統(tǒng)一發(fā)送至DSP芯片;
(4) 接收DSP芯片發(fā)送的PWM信號,進(jìn)行互鎖后輸出;
(5) 接收母線過壓、欠壓、三相過流以及IPM故障等信號,并在故障情況下通過封鎖PWM輸出信號實(shí)施保護(hù)。
3 伺服控制軟件設(shè)計
伺服控制軟件運(yùn)行于DSP芯片中,主要接收指令和反饋的狀態(tài)信息,并通過相應(yīng)控制算法實(shí)現(xiàn)對電機(jī)的位置、速度和電流的三閉環(huán)控制。閉環(huán)控制原理框圖如圖3所示。三閉環(huán)都根據(jù)指令和反饋的誤差設(shè)計了PI控制算法,其中電流控制算法中對電機(jī)采用磁場定向矢量控制,經(jīng)過Clark變換和Park變換將靜止ABC坐標(biāo)系下的三相電流變換成旋轉(zhuǎn)dq坐標(biāo)系下的兩相電流,采用閉環(huán)算法調(diào)節(jié)電機(jī)的dq軸電流,再分別通過Park逆變換、Clark逆變換以及PWM法調(diào)制定子三相電壓,從而達(dá)到控制電機(jī)的目的。
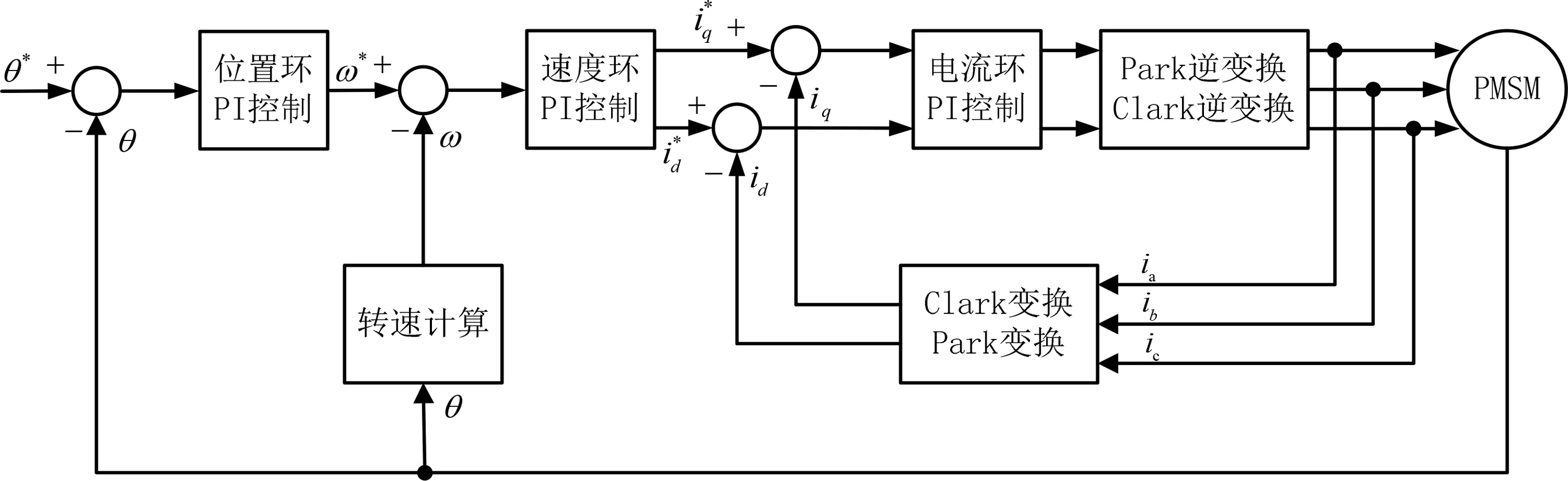
圖3 三閉環(huán)控制原理框圖
伺服控制的軟件主要包含主程序和中斷程序兩個部分。主程序首先進(jìn)行系統(tǒng)初始化,配置控制芯片各功能模塊寄存器參數(shù)和系統(tǒng)參數(shù),接著進(jìn)行驅(qū)動器狀態(tài)自檢,判斷各個部件功能是否正常,若自檢異常則閃爍故障指示燈報警,若自檢通過便接通動力電并進(jìn)入循環(huán)狀態(tài)。進(jìn)入循環(huán)狀態(tài)后控制芯片首先接收控制指令,接收到運(yùn)行指令后打開定時器中斷。在定時器中斷子程序中執(zhí)行電機(jī)控制算法,驅(qū)動電機(jī)運(yùn)行。接收到停止指令后則關(guān)閉定時器中斷,停止電機(jī)運(yùn)行。在每個定時器中斷子程序運(yùn)行結(jié)束后,查詢過壓、欠壓、過流等故障信號,若發(fā)現(xiàn)故障則立刻封鎖PWM輸出信號并閃爍故障指示燈報警,若無故障則循環(huán)等待下一個定時器中斷的到來。
定時器中斷子程序是整個伺服驅(qū)動器控制算法的核心部分,在定時器中斷子程序中完成電機(jī)位置、速度和電流控制算法。定時器中斷周期為0.1 ms,其決定了PWM輸出信號的頻率,也就是電流環(huán)的周期。進(jìn)入定時器中斷子程序后,首先讀取電機(jī)的位置、速度和電流信息,接著根據(jù)不同的工作模式讀取位置、速度或電流指令并運(yùn)行相應(yīng)的控制算法,最后輸出控制電機(jī)的PWM信號。
4 實(shí)驗結(jié)果
所研制的交流伺服驅(qū)動器輸出功率約為6 kW。為了研究交流伺服驅(qū)動器的控制性能,適配天津東籬型號為M-407-B的伺服電機(jī),其額定功率為5.5 kW,額定轉(zhuǎn)速為3 200 r/min。
實(shí)驗1:跟蹤額定轉(zhuǎn)速的階躍信號,實(shí)驗結(jié)果如圖4所示。
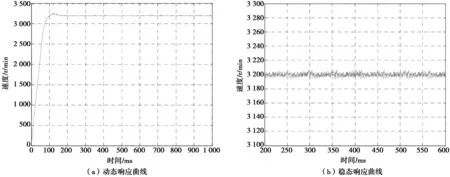
圖4 跟蹤3 200 r/min的階躍響應(yīng)曲線
從圖4可以看出,M-407-B電機(jī)在跟蹤3 200 r/min的階躍信號時上升時間約為80 ms,超調(diào)量為1.5%,穩(wěn)態(tài)時轉(zhuǎn)速波動峰峰值小于5 r/min。這表明所設(shè)計的驅(qū)動器具有很好的動態(tài)性能和穩(wěn)態(tài)精度。
實(shí)驗2:跟蹤額定轉(zhuǎn)速的正弦信號,實(shí)驗結(jié)果如圖5所示。從圖上可以看出,電機(jī)能夠很好地跟蹤幅值為3 200 r/min,周期為1 s的速度正弦信號,跟蹤誤差的峰值小于20 r/min。這表明所設(shè)計驅(qū)動器在控制參數(shù)不變的情況下能夠驅(qū)動電機(jī)跟蹤階躍和正弦信號,具有很好的自適應(yīng)性能。
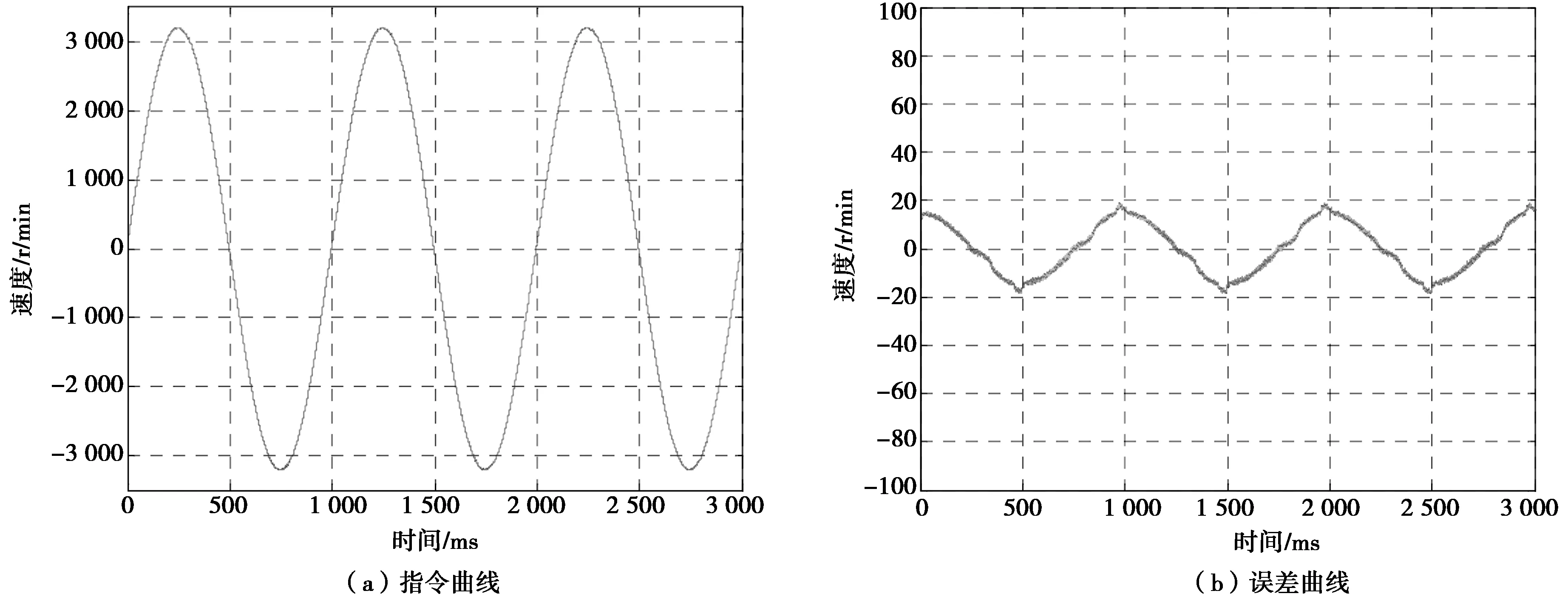
圖5 跟蹤正弦信號的響應(yīng)曲線
5 結(jié)束語
為了適應(yīng)艦載雷達(dá)伺服系統(tǒng)高性能的控制要求,本文基于模塊化的思想設(shè)計了一種以數(shù)字信號處理芯片和智能功率模塊作為核心元件的交流伺服驅(qū)動器,具有結(jié)構(gòu)緊湊、硬件集成化程度高、軟件控制算法先進(jìn)等優(yōu)點(diǎn)。實(shí)驗結(jié)果表明,所設(shè)計的交流伺服驅(qū)動器能夠在控制參數(shù)不變的情況下驅(qū)動電機(jī)高性能地跟蹤階躍信號和正弦信號,并且具有很好的自適應(yīng)性能。
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
今日農(nóng)業(yè)(2021年14期)2021-10-14 08:35:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
海峽姐妹(2020年8期)2020-08-25 09:30:18
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
