一種實時監控的車道偏離預警系統
2019-03-22 09:27:16夏道華張振東逄蘭芹張相坤
汽車實用技術 2019年5期
夏道華,張振東,逄蘭芹,張相坤
?
一種實時監控的車道偏離預警系統
夏道華,張振東,逄蘭芹,張相坤
(山東科技職業學院,山東 濰坊 261000)
車道偏離預警系統是一種通過聽覺警告、視覺警告以及觸覺警告等方式輔助駕駛員減少汽車因車道偏離而發生交通事故的系統。針對目前大部分車道偏離預警系統不能實時監控車輛偏離情況,文章提出了一種實時監控的車道偏離預警系統,該系統將車速劃分為若干個不同區間,在每個速度區間內設置不同的閾值,這樣就可以解決當前車道偏離預警系統只在大于某一速度值下才發揮作用并且只設置一個閾值的問題,通過驗證該預警系統能夠有效起到車道偏離預警的作用。
車道偏離;預警系統;閾值;交通事故
前言
車道偏離預警系統是一項先進的車輛主動安全技術。該系統在駕駛員無意識(駕駛員未打轉向燈)偏離原車道時,能在偏離車道之前零點幾秒內發出警報,或振動方向盤和座椅來提醒駕駛員車輛偏離的狀況,防止車輛駛離本車道而發生交通事故。
1 目前車道偏離預警系統的現狀
目前在高校和研究所里有進行車道偏離預警技術的研究工作,比較具有代表性的有吉林大學的JLUVA-1 系統,能夠初步實現對車輛行駛道路的識別,車道標線提取和行車路徑的確定等,以及東南大學的DSP 的嵌入式車道偏離報警系統和清華大學THMR 系列智能汽車中的車道偏離識別系統等[1]。雖然國內的車道偏離預警系統在性能上有較大的提高,但在車道偏離預警系統產品的開發和應用過程中,仍有不足的地方需要去完善和克服。基于現有車道偏離預警系統的不足,文中提出了一種改進的車道偏離預警系統。
2 一種改進的實時車道偏離預警系統
2.1 結構組成
本文提出了一種實時監控的車道偏離預警系統,該系統將車速劃分為若干個不同區間,在每個速度區間內設置不同的閾值,這樣就可以解決當前車道偏離預警系統只在大于某一速度值下才發揮作用并且只設置一個閾值的問題。一種實時監控的車道偏離預警系統,其特征包括以下五部分。
(1)攝像機標定模塊,主要是對兩個CCD攝像機進行內外參數的標定。
(2)車道標線處理模塊,主要對攝像機采集的道路視頻信號利用數字信號處理器(DSP)進行處理,獲得車輛在車道中的準確位置。
(3)車速采集與判斷模塊,主要通過車速傳感器獲取車輛速度,并把采集到的車速與存儲器內存儲的速度區間進行比較,速度區間按照車速的大小,從零開始劃分為若干個區間,分別記為速度區間V1、速度區間V2、速度區間V3……速度區間Vn。車速傳感器采集的車速通過判斷,確定該車速所在區間,從而確定該速度下車輛與車道標線間的距離之差的閾值。
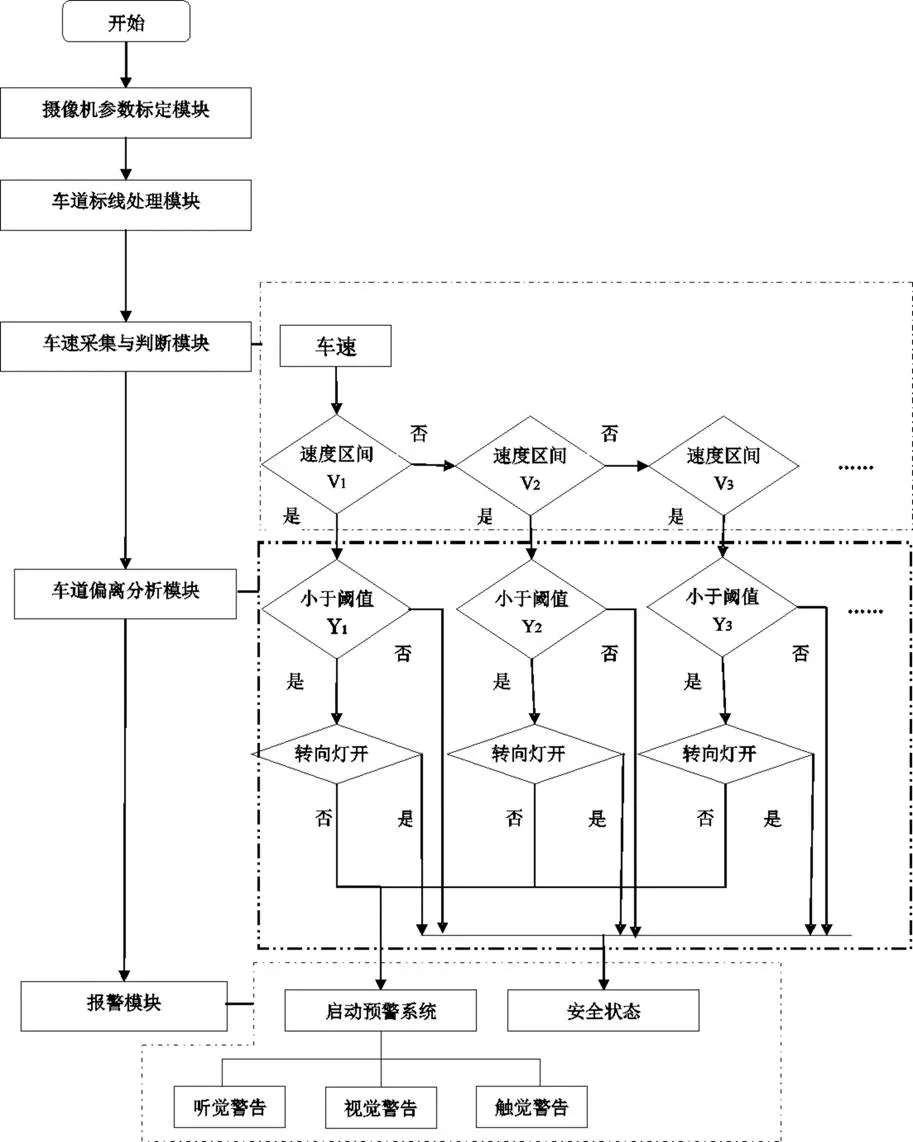
圖1 一種實時監控的車道偏離預警系統結構框圖
(4)車道偏離分析模塊,該模塊主要根據車速區間確定相應的閾值,閾值和速度區間一一對應,即每一個速度區間對應一個閾值,閾值分別為Y1、Y2、Y3……Yn,并且閾值大小Y1 (5)報警模塊,主要對駕駛員駛離本車道時,進行警告提醒,包括聽覺警告、視覺警告以及觸覺警告等。如圖1所示的是一種實時監控的車道偏離預警系統結構框圖。 首先,兩個CCD攝像機進行內外參數的標定,標定完參數后,啟動車輛,同時車道偏離預警系統開始工作,通過安裝在前擋風玻璃內的兩個攝像機獲取道路標線數字視頻信號,并送至數字信號處理器(DSP)進行處理,獲得車輛在車道中的位置信息。由車速傳感器獲取車輛的行駛速度,并將該車速與存儲器內存儲的速度區間進行比較,確定該速度所屬區間,例如某一時刻車速傳感器測得的車速為V,該速度V首先判斷是否屬于速度區間V1,若不屬于速度區間V1,繼續判斷該速度是否屬于區間V2,依次類推,直至確定速度V所屬的速度區間。假若該速度V屬于區間Vi,接下來需要判斷車輛與車道標線之間的距離是否小于速度區間Vi所對應的閾值Yi,若車輛與車道標線之間的距離大于閾值Yi,則說明車輛在本車道內正常行駛;若車輛與車道標線之間的距離小于閾值Yi,則需進一步判斷駕駛員是否打開轉向信號燈,若開啟信號燈,則不發出警告,若駕駛員未開啟信號燈,則警告模塊發出警告,提示駕駛員車輛即將偏離車道。 該車道偏離預警系統將車速從零開始劃分為不同的區間,并在每個速度區間設置不同的閾值,這樣對于車輛的任意一個行駛速度,都會有一個閾值與之對應,提高了車道偏離預警系統的靈敏性。 該車道偏離預警系統采用兩個CCD攝像機,分別安裝于前擋風玻璃內側的兩側處,分別檢測左右車道標線,與單攝像機相比,雙攝像機能更好地獲取車道標線信息。 本文利用MATLAB/Simulink與CarSim軟件,搭建模型進行了聯合仿真,通過仿真實驗發現,文中提出的車道偏離預警系統,明顯優于其他預警系統模型。 文中通過分析目前車道偏離預警系統的研究現狀,提出了一種改進的車道偏離預警系統,該系統通過聯合仿真實驗,驗證了該系統比其他系統更準確地判斷車輛的偏離狀態。該系統目前已通過仿真實驗階段,下一步將進行實車驗證。 [1] 孫德鑫.車道偏離預警系統的研究[J].時代汽車,2018. [2] 高琪,馮燕,梁瑞波.基于結構化道路的車道偏離實時預警算法[J].計算機仿真,2018. [3] 谷燕如,黃忠朝.車道檢測與偏離預警系統研究綜述[J].時代農機,2018. [4] 胡詩婷,舒思.車道偏離輔助駕駛專利技術分析[J].計算機產品與流通,2018. [5] 金浙,張帥,閆豐雨.基于機器視覺的直行車道路偏離預警系統設計[J].汽車工程師,2018. A real-time monitoring lane departure warning system Xia Daohua, Zhang Zhendong, Pang Lanqin, Zhang Xiangkun (Shandong Vocational College of Science and Technology, Shandong Weifang 261000) The lane departure warning system is a system that assists the driver in reducing traffic accidents caused by lane departures by means of an audible warning, a visual warning, and a tactile warning.For most of the current lane departure warning systems, the vehicle deviation cannot be monitored in real time.This paper proposed a real-time monitoring lane departure warning system. The system divided the vehicle speed into several different intervals and set different thresholds in each speed interval. This can solve the current lane departure warning system only at a certain speedand only sets a threshold.By verifying that the early warning system can effectively play the role of lane departure warning. Lane departure;Warning system;Threshold;Traffic accident A 1671-7988(2019)05-57-02 U471 A 1671-7988(2019)05-57-02 U471 夏道華(1987-),男,就職于山東科技職業學院,從事汽車安全方面研究。 10.16638/j.cnki.1671-7988.2019.05.0172.2 工作過程
2.3 優勢
3 驗證
4 總結