一款全時四驅電控分動器總成的開發介紹
2019-03-22 09:27:28劉志柱李柱蔡未末張鑫肖峻
汽車實用技術 2019年5期
劉志柱,李柱,蔡未末,張鑫,肖峻
?
一款全時四驅電控分動器總成的開發介紹
劉志柱1,李柱2,蔡未末1,張鑫1,肖峻2
(1.東風汽車公司技術中心,湖北 武漢 430058;2.武漢理工大學機電工程學院,湖北 武漢 430070)
為保證多軸驅動車輛的行駛性能和操作舒適性,分動器的設計至關重要。針對某款全時四驅電控分動器總成的開發與測試,介紹了全時四驅電控分動器換擋機械結構、控制器組成原理、換擋策略設計、故障診斷系統設計。全時四驅電控分動器總成開發完成后在臺架上進行換擋可靠性試驗,試驗結果證明:機械結構可滿足換擋要求、換擋策略合理、控制器穩定可靠。
分動器;控制器;控制策略;故障診斷;臺架測試
引言
由于全輪驅動系統技術能夠使車輛擁有更好的穩定性、通過性和操作性能,所以使其成為當前越野汽車的主要特征之一,而分動器則是汽車實現全輪驅動的核心部件。當前四驅系統的工作方式主要有分時四驅、全時四驅、適時四驅三種模式[1],操作形式則可分為手動和電動兩種形式。手動分動器需要駕駛員在多變的越野路況下操作換擋桿,并兼顧其他操作,對駕駛技術要求高,而且分動器有特定的檔位順序和換擋條件,駕駛員易造成誤操作[2]。然而電控分動器以換擋按鈕作為輸入信號,從而由驅動電機進行換擋。雖然電控分動器具有換擋簡單、安全性好等優點,但存在以下難點:換擋操縱裝置的開發、分動器控制器TCU的開發、控制策略的開發、臺架實驗困難。針對上述問題,設計了具有“滑動齒套差速不傳扭”特點的行星差速換擋機構。設計控制器和編寫程序完成對整車狀態信息采集,準確判斷駕駛員操作意圖,從而發送換擋指令順利完成換擋以及信息提醒。最后,在實驗臺架上進行全時四驅電控分動器的臺架疲勞耐久試驗以及電控換擋操縱系統循環換擋10萬次目標耐久試驗。
1 背景介紹
為充分發揮四驅車輛的性能和提供對車輛的傳動系統的保護,本款全時四驅電控分動器設置有四個行駛模式,分別為HL、H、N及L模式。四個模式對應著不同的適用行駛工況和車速范圍,具體說明如下:
HL模式:當車輛行駛時出現輪胎打滑或車輛行駛在附著力低的路面(如結冰路面或雪地、潮濕光滑等路面)選擇HL模式行駛。在HL模式下行駛,為了車輛安全,車速建議不要超過60km/h。
H模式:在城市路面等較平坦的路面、高速公路等大部分路況下,選擇該H模式行駛,每次車輛下電后再次上電,分動器初始擋位默認為H擋,行駛模式旋鈕默認H模式。
N模式: 當車輛出現故障,車輛無法正常行駛需要拖車時,為了對車輛傳動系統的保護,拖車時,車輛分動器需要處于N檔,行駛模式為N模式。
L模式:在極限工況下,如無路、越野、爬坡、越障等條件下,車輛設定為低檔四輪驅動模式。在L模式下行駛,為了車輛安全,車速建議不要超過20km/h。
2 全時四驅電控分動器方案開發設計
2.1 全時四驅電控分動器本體結構設計
該款電控分動器總體結構如圖1所示,主要由主要由殼體、行星減速機構、行星差速機構、換擋操縱機構、鏈輪鏈條傳動機構六個部分組成。核心電控換擋操縱裝置結構如圖2所示,換擋電機依據換擋信號驅動換擋凸輪軸從而進行HL、H、N、L四個模式的切換。
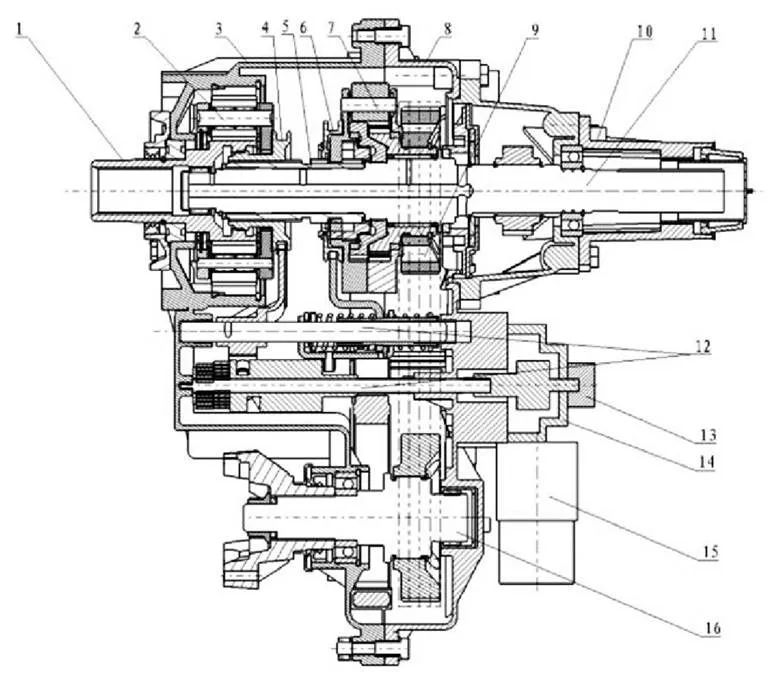
圖1 全時四驅電控分動器總成機械本體結構
1-分動器輸入軸 2-行星減速機構3-前殼體 4-高低檔滑動齒套 5-后橋驅動軸軸套 6-差速鎖止撥叉套 7-行星差速機構 8-中殼體 9-鏈輪傳動裝置 10-后殼體 11-后橋驅動軸 12-電控換擋操縱裝置 13-電機位置編碼器 14-電機減速器 15-換擋電機 16-前橋驅動軸
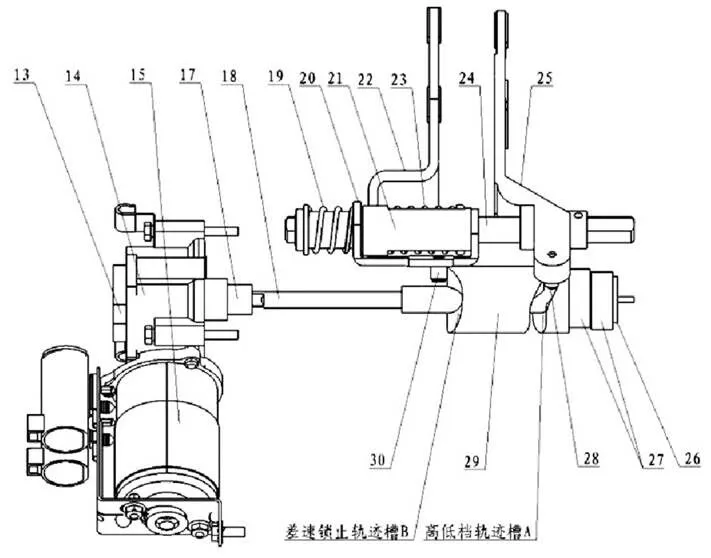
圖2 電控換擋操縱裝置結構示意圖
13-電機位置編碼器 14-電機減速器 15-換擋電機 17-電機減速器輸出軸 18-換擋凸輪軸 19-差速退檔彈簧 20-差速鎖止導塊 21-差速進檔彈簧固定架 22-差速鎖止撥叉 23-差速進檔彈簧 24-撥叉軸 25-高低檔撥叉 26-彈性件支撐片27-彈性件 28-高低檔滾輪 29-凸輪 30-差速鎖止滾輪
如圖2所示,換擋電機15輸出端和電機減速器14相連。電機減速器14端部裝有電機位置編碼器13,用于反饋電機位置信號。電機減速器輸出軸17通過三角形凹槽和換擋凸輪軸18軸端的三角形凸起連接,凸輪29和彈性件27空套在換擋凸輪軸18上。彈性件支撐片26和換擋凸輪軸18采用焊接或鉚接,可同步旋轉。差速退檔彈簧19、差速鎖止導塊20、差速進檔彈簧固定架21、差速鎖止撥叉22、差速進檔彈簧23和高低檔撥叉25均空套在撥叉軸24上。凸輪29上設有高低檔軌跡槽A和差速鎖止軌跡槽B,高低檔滾輪28一端在高低檔軌跡槽A內,另一端固定在高低檔撥叉25上。差速鎖止滾輪30一端在差速鎖止軌跡槽B內,另一端固定在差速鎖止導塊20上。
高低檔軌跡槽A為封閉式,換擋時,由軌跡槽推動高低檔滾輪28和高低檔撥叉25沿撥叉軸24左右運動,執行換擋操作。差速鎖止軌跡槽B左半邊為開放式,當由N(非鎖止)檔進入L(鎖止)檔時,軌跡槽B推動差速鎖止滾輪30、差速鎖止導塊20、進檔彈簧固定架21向左運動,壓縮進檔彈簧23,由進檔彈簧23推動差速鎖止撥叉22向左運動,進入L檔,同時壓縮退檔彈簧19;而從L(鎖止)檔退入N(非鎖止)檔時,軌跡槽B僅給滾輪30留出向右運動的空間,由退檔彈簧19提供退檔力。
下面以從HL(高速鎖止)檔換入N檔(空檔)為例,介紹電控換擋操縱裝置的實施方式。如圖2所示,當駕駛員將檔位選擇開關由HL置為N,分動器控制單元判斷車輛狀態是否滿足換擋條件,若滿足,則驅動換擋電機15通過彈性件27推動換擋凸輪29按照圖2中箭頭所示方向旋轉α°,旋轉過程中,凸輪29上的高低檔軌跡槽A不斷向左延伸,推動軌跡槽內的高低檔滾輪28和高低檔撥叉25沿撥叉軸24向左運動,從H(高速)檔進入N檔(空檔)。與此同時,旋轉過程中,由于凸輪29上的差速鎖止軌跡槽B向右延伸,而軌跡槽B左邊為開放式,這樣就給差速鎖止滾輪30留出了向右運動的空間,退檔彈簧19推動差速鎖止滾輪30和差速鎖止撥叉22沿撥叉軸24向右運動,從L(鎖止)檔退入N(非鎖止)檔。以此類推,當換擋電機15帶動凸輪29旋轉時,軌跡槽推動兩組滾輪和撥叉沿撥叉軸運動,使得分動器進入相應檔位。
2.2 全時四驅電控分動器控制器設計
全時四驅電控分動器控制器作為全時四驅電控分動器總成的核心部件,對分動器的正常工作關系重大[3],而硬件則又是控制器能夠穩定、安全工作的基礎和保障。
經過分析,分動器控制器的主要功能有以下三點:換擋電機控制、換擋電機位置檢測以及系統故障診斷。針對以上三項功能,系統分動器控制器電控單元原理圖如圖3所示,控制器主要包含電源、信號采集、CAN通信、驅動和電流檢測及驅動保護等部分。其中開關信號包含檔位選擇、離合器位置、制動等信號。轉速信號和換擋信號經過處理后進入控制器,分動器控制器采通過馬達位置編碼器檢測檔位位置。比較換擋信號和換擋后實際位置形成位置閉環控制,從而準確完成檔位調換。
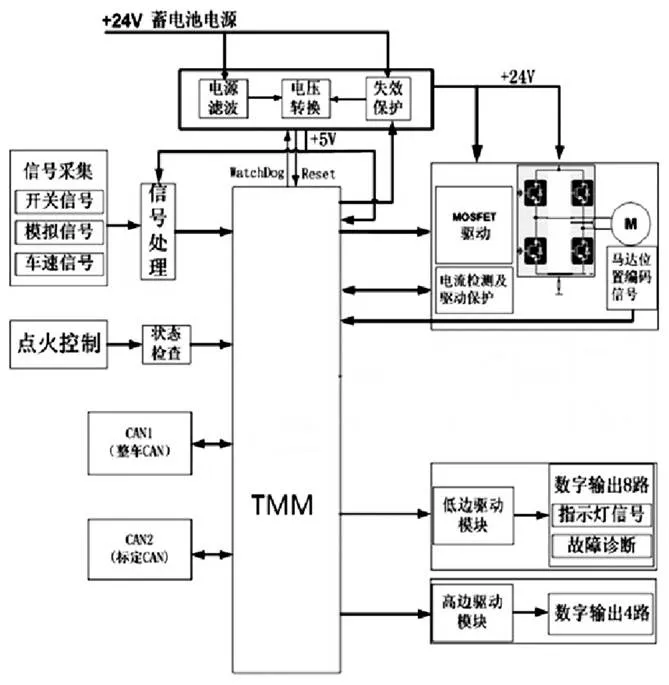
圖3 電控分動器控制器原理圖
2.3 控制策略設計
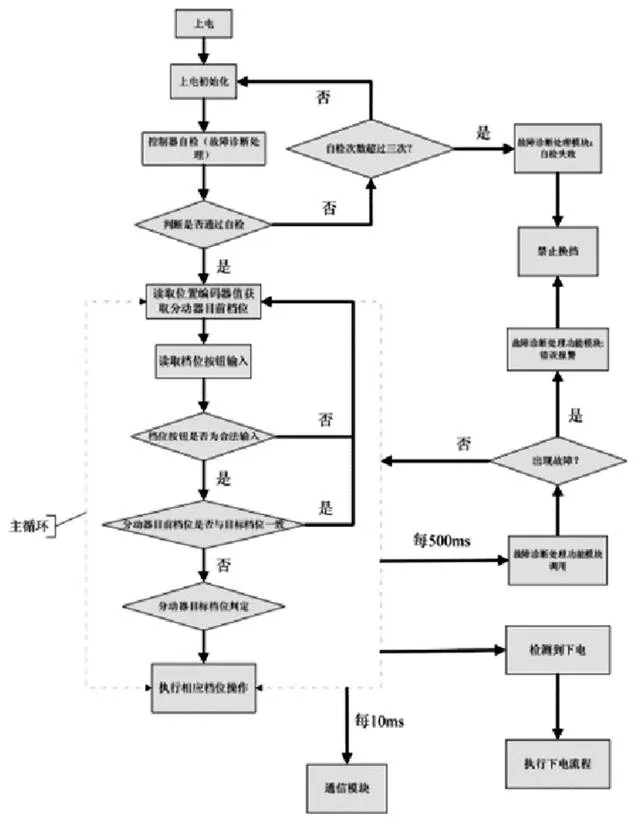
圖4 換擋控制策略流程圖
為滿足全時四驅電控分動器功能要求和安全需求,軟件整體策略由上電初始化自檢模塊、換擋模塊、通信模塊、故障診斷模塊和下電處理模塊等組成[4]。在程序主循環中,控制器通過馬達位置編碼器和檔位選擇按鈕不斷讀取分動器當前檔位和目標檔位,設置換擋條件進行此次換擋行為的合法判斷從而決定是否執行換擋操作。當目標檔位和當前檔位一致時則等待條件滿足和新的檔位選擇開關信號。當目標檔位和當前檔位不一致時進行換擋條件判定,如果滿足則執行換擋操作。為增強分動器的可靠性和可維護性,主程序中同時設置周期為500ms的故障診斷程序為駕駛員提供可能出現的故障參考。全時四驅電控分動器控制策略原理圖如圖4所示。
2.4 故障診斷系統設計
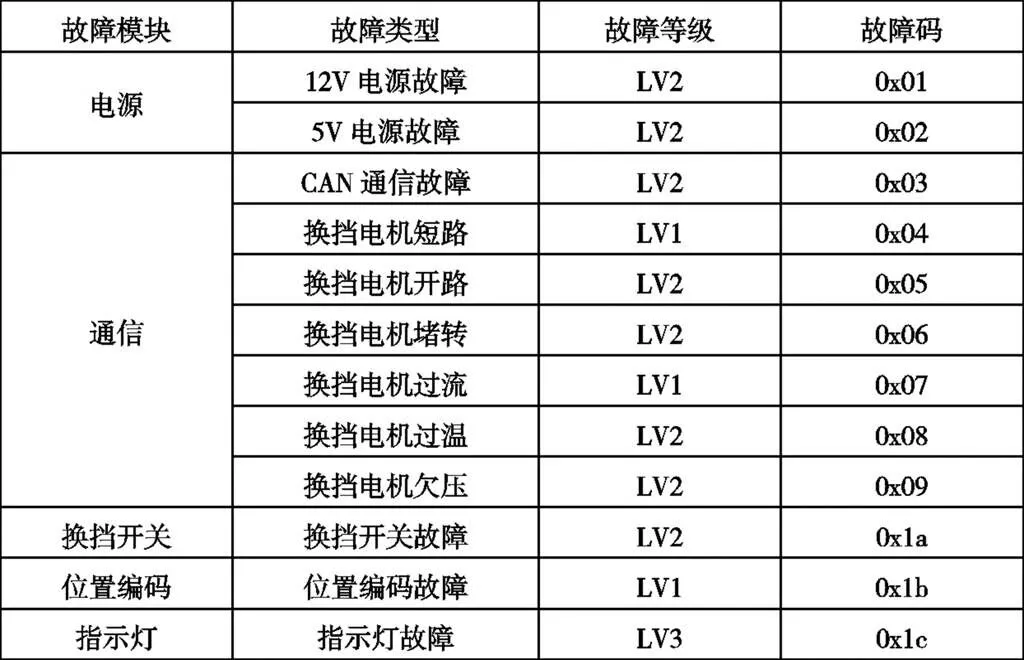
由于復雜電路的使用,全時四驅電控分動器在為駕駛員提供操作方便的同時也降低了其可維護性。針對出現故障時檢查度大、專業能力要求高的問題,控制器中設計了完善的故障診斷系統[5],故障診斷主要內容見表5。整車CAN依據故障代碼將故障類型顯示在顯示屏上或由專業汽車維修人員通過整車CAN讀取故障碼判斷故障類型。
表5 故障碼對應的故障信息以及處理措施
全時四驅電控分動器開發定型過程中以及產品量產后需要定期在帶前后負載的專業檢測臺架上進行電控分動器換擋功能可靠性的檢測認可試驗[6]。試驗樣品進行臺架試驗時,全時四驅電控分動器裝于試驗臺上應與其在汽車上的實際工況相似。試驗測試臺架所需的一臺驅動電機、兩臺測功機布置安裝根據電控分動器的偏置進行適應調整[7]。根據分動器中心距離以及在整車上的偏置角來設計臺架試驗工裝,將被測試的樣品安裝固定。輸入電機、輸出測功機,試驗樣品在臺架布置如圖6所示。
測試內容需要根據實際電控分動器各檔位排列設計順序來確定。測試臺架監控各檔位是否按照設計的臺架既定換擋策略進行換擋,反饋換擋成功與失敗次數。由于目前開發電控分動器四個擋位是按照HL、H、N、L進行依次排列設計,為了驗證設計換擋機構可靠性,將按照上述四個擋位測試內容進行可靠性臺架試驗。電控分動器換擋可靠性臺架試驗測試結果包括以下內容如表7所示。
表7 全時四驅電控分動器換擋可靠性臺架試驗測試結果
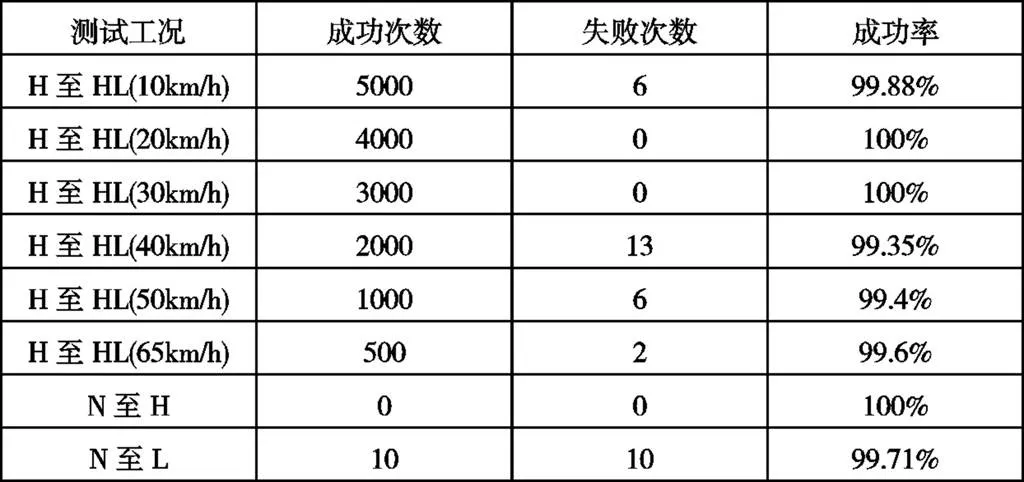
對于測試過程中出現的較小頻次換擋失敗現象,經過分析原因如下。電控分動器換擋操縱機構的換擋撥叉齒套與結合齒在換擋過程中會較小概率的出現需要換擋力較大情況。當換擋電機提供的換擋力小于需要的換擋力時,換擋機構中具有換擋緩沖作用的扭簧給換擋機構蓄能,保證換擋電機不會堵轉。當換擋馬達的位置編碼器識別到目標擋位時,電機停止轉動,具有自鎖功能的換擋機構鎖止電機不會反轉。但是,實際分動器換擋撥叉沒有到位,當外界需要的換擋力變小時,扭簧提供的換擋力滿足換擋力需求時,換擋撥叉到位,即在實際工作中表現為換擋到位需要延遲一定時間。由于臺架換擋測試的連續性以及臺架控制標定時間參數與實際試驗測試的全過程不可能完全匹配,所以臺架測試時會出現換擋失敗現象。這種出現頻次在測試過程中出現的概率較小,一般要求在2%以內是可以接受的[7]。
4 結束語
本文在手動分動器的基礎上開發全時四驅電控分動器,在檔位操縱機構上面使用步進電機、凸輪、位置編碼器等來完成換擋動作和位置檢測。同時使用彈性件,避免機構因剛性連接而損壞,同時可以實現在車速小于60km/h時換H擋與HL擋,在車速小于2km/h時實現換L擋和N擋。自主開發的電控分動器控制器TMM和換擋控制策略,可準確判斷駕駛員意圖,根據采集的車輛狀態信息,發送換擋指令,并可與儀表進行通訊,在儀表上顯示相關信息等。通過分動器試驗臺架對全時四驅電控分動器總成進行最后的臺架試驗,試驗表明,該總成穩定可靠,達到設計要求。文章介紹了電控分動器開發的主要內容,為其它汽車上控制器的開發提供了參考。
[1] 夏權.分時四驅汽車用分動器力學特性與性能分析[D].安徽農業大學,2015.
[2] 金姣姣.車輛分動器性能及其檢測系統研究[D].浙江大學,2008.
[3] 彭曉宇.新能源汽車動力電機控制器硬件功能安全的需求開發[J].汽車電器,2018(09):13-15.
[4] 王鳴,張振東.電動汽車充電網關控制器開發[J].能源研究與信息,2018,34(03):159-163.
[5] 張云龍,袁大宏,王國戟.電控汽車故障診斷技術的現狀與發展趨勢[J].汽車技術,2000(07):30-32.
[6] 王鈺明.智能四驅車輛分動器力學特性與性能分析研究[D].安徽農業大學,2012.
[7] 王韋韋,陳黎卿,胡芳.分動器性能測控試驗系統設計[J].湖北汽車工業學院學報,2016,30(02):8-12.
Development of a Full-time Four-drive Electrically Controlled Transfer Assembly
Liu Zhizhu1, Li Zhu2, Cai Weimo1, Zhang Xin1, Xiao Jun2
( 1.Dongfeng Automobile Technology Center, Wuhan Hubei 430058; 2.Mechanical and Electrical Engineering, Wuhan University of Technology, Wuhan Hubei 430070 )
In order to ensure the driving performance and operation comfort of multi-axle drive vehicles, the design of actuator is very important. Aiming at the development and test of a full-time four-drive electronic control distributor assem -bly, this paper introduces the structure of the transmission mechanism, the principle of the controller, the design of the shift strategy and the design of the fault diagnosis system of the full-time four-drive electronic control distributor. After the development of full-time four-drive electronic control actuator assembly, the shift reliability test is carried out on the bench. The test results show that the mechanical structure can meet the shift requirements, the shift strategy is reasonable, and the controller is stable and reliable.
Transfer; Controller; Control Strategy; Fault Diagnosis; Bench Test
A
1671-7988(2019)05-131-04
U462
A
1671-7988(2019)05-131-04
: U462
劉志柱(1982-),男,工程師,就職于東風汽車公司,主要研究方向:汽車傳動系統設計。
10.16638/j.cnki.1671-7988.2019.05.040