基于改進結構樹的拆裝序列規劃方法
2019-03-28 06:33:16陸皖麟徐丙立邵小耀
兵器裝備工程學報 2019年2期
饒 毅,陸皖麟,徐丙立,邵小耀
(1.陸軍裝甲兵學院, 北京 100072; 2. 66132部隊, 北京 100043; 3. 66133部隊, 北京 100043)
維修是指通過故障現象確定故障原因,對發生故障的部件進行修理使系統恢復正常工作的過程,是提高裝備使用壽命的主要方法[1-2]。如何進行維修作業規劃關系到維修效率及成本的問題,如何規劃好維修作業流程是當前維修的研究熱點,在維修的過程中,拆裝是主要的工作手段,在整個維修過程中所占時間能達到總時間的40%~60%[3]。因此,維修作業規劃主要是對裝配序列進行科學規劃,以提高維修效率,降低維修成本。對拆裝序列規劃一直是國內外專家的研究熱點,如文獻[4-9]中分別提出了混合圖、約束圖、割集等基于知識等規劃方法,這些方法的核心都是解決如何對零部件信息及連接關系信息進行表達和調用,用以支持拆裝序列規劃,但是零部件之間的連接信息多樣,容易導致規劃的序列產生混亂。
為保證裝配的正確性,本文提出了一種基于改進結構樹的維修作業規劃方法,以結構樹作為裝配序列規劃的工具,基于約束關系對結構樹進行適應性改進,根據結構樹得到故障零件的拆裝序列及路徑,針對同一零件存在多條路徑的問題,構建基于時間、工具變換次數、拆裝方位變換等評價指標,采用優劣距離綜合評價算法選擇出最優的拆裝路徑。
1 拆裝序列規劃流程
維修實質是人-產品-工具三者之間發生交互的過程,拆裝序列規劃是對交互發生順序、交互方式以及交互對象進行科學合理的規劃,使得維修更加高效快捷。因此,可以將維修作業分為以下幾個層次:維修作業層、拆裝序列層、拆裝步驟層。如圖1所示[9]。
維修作業層:對需要進行的維修任務進行規劃,包括部件拆卸、修復和裝配等;
拆卸序列層:對維修作業層規劃的維修任務,涉及到得維修部件進行序列規劃,得到科學可行的拆裝序列,假設拆卸與組裝是可逆的;
拆裝步驟層:根據拆裝序列,確定進行維修的步驟,將序列轉化為可以進行交互的步驟。
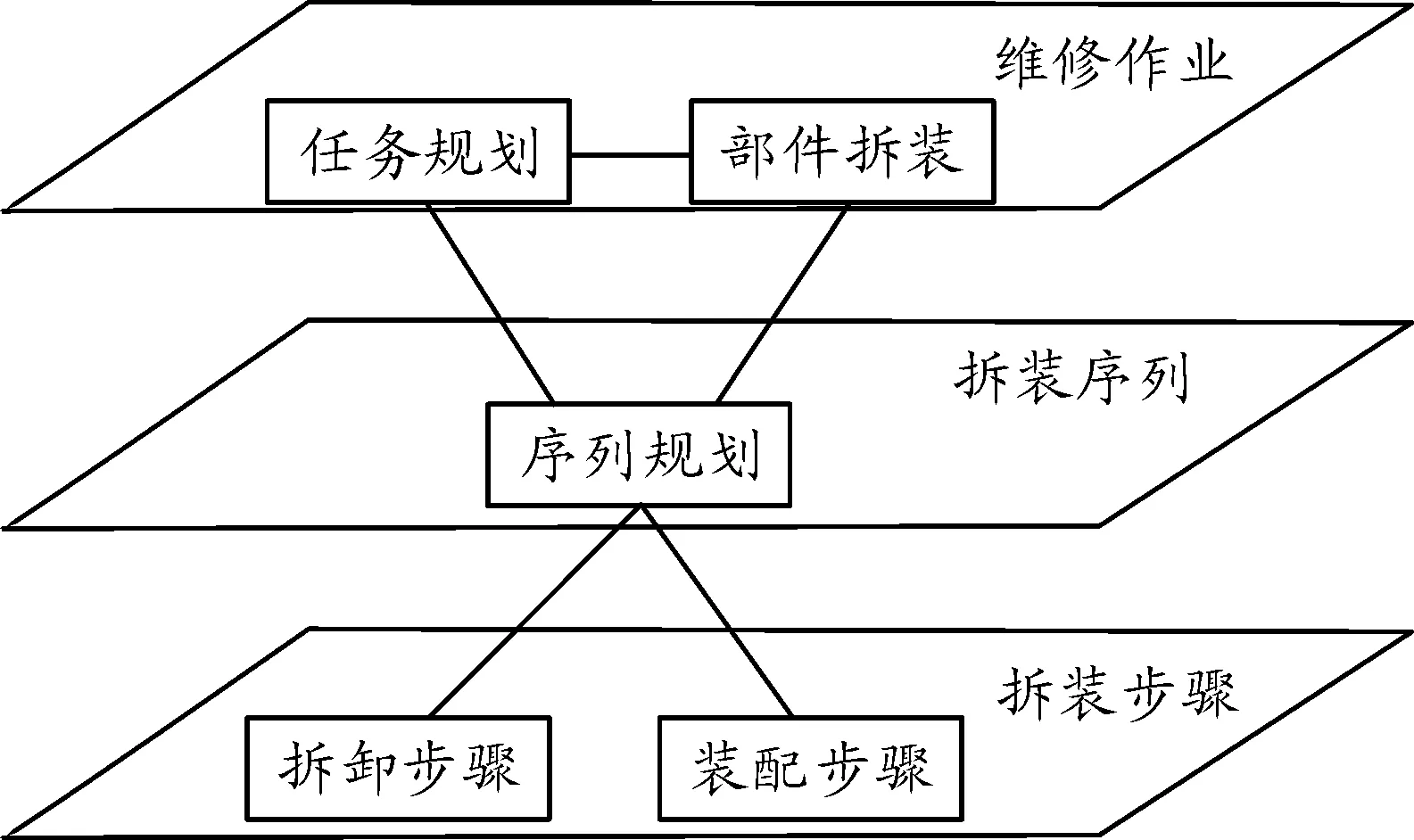
圖1 維修作業規劃流程
2 基于約束關系的結構樹構建
一個產品可以分為多個部件,部件又可以分解為小部件直至分解為零件,由此產品與部件、上級部件與下級部件形成了層級關系,這種關系可以以樹狀的形式表示,稱為結構樹。
結構樹(Structure Tree,ST):將待維修對象根據層級進行分解,部件分解成小組件或者零件,直到將所有的部件都分解為零件為止,由此形成的一個待維修對象的零件空間結構的樹狀結構稱為結構樹。ST反映的是待維修對象中各部件的層次關系,最頂層的節點(稱為根節點)代表待維修對象,中間各節點代表的是組成待維修對象的組件和部件,最底端的節點(葉節點)代表不可再拆卸的零件,即在維修中需要進行維修或者更換的部分,結構樹模型如圖2所示。
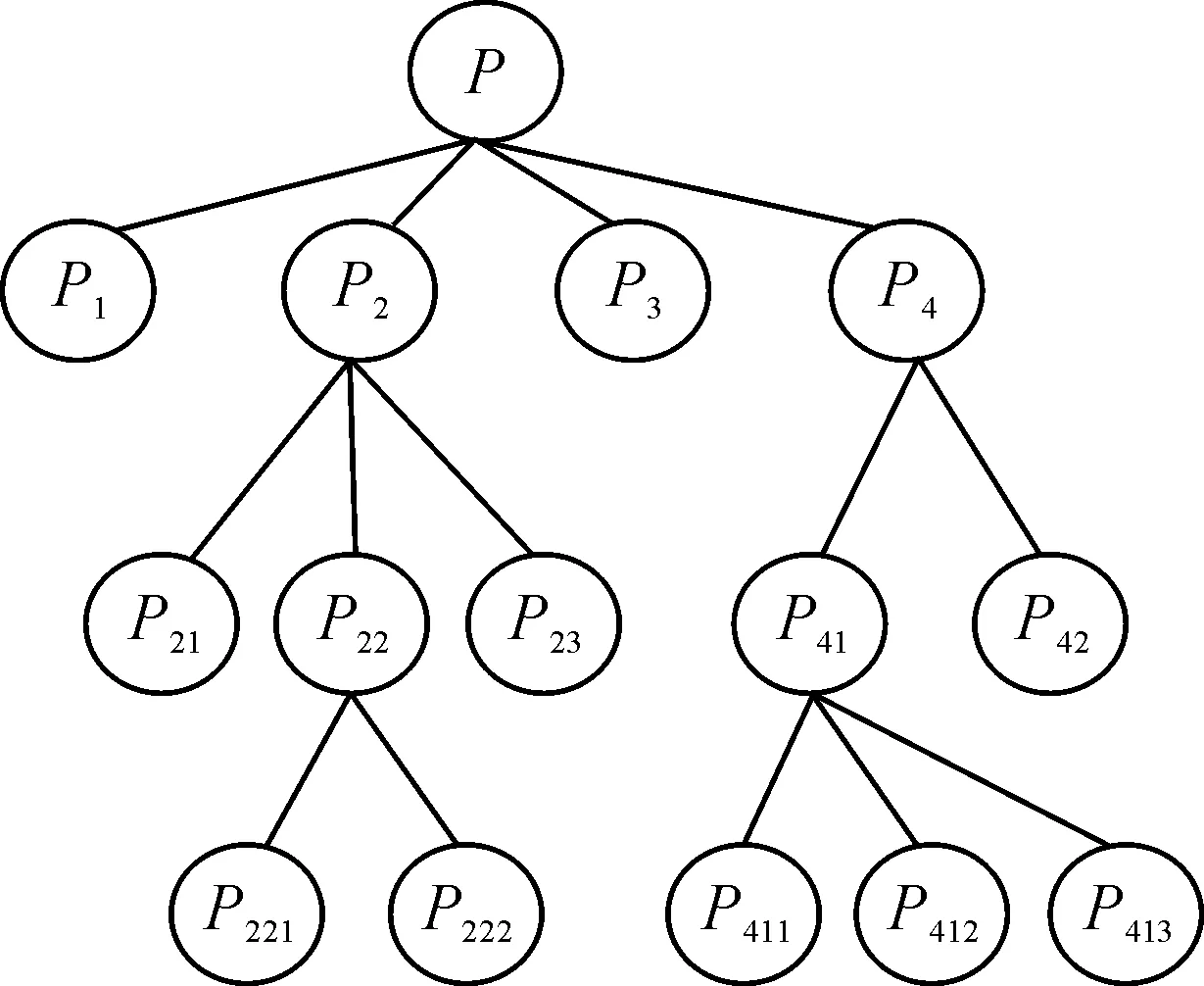
圖2 結構樹模型
2.1 定義約束信息模型
產品是由零件及零件間的約束關系組成的,約束關系表現了零件間的制約關系,包括空間運動及配合關系,可以用一下約束信息模型表示:
G={P,R}
其中:P={P1,P2,…,Pn}是零部件的集合,R={R1,R2,…,Rm}是零部件約束關系的集合。
約束信息模型如圖3所示,各節點代表零部件,連線代表節點之間的約束關系,箭頭方向代表兩零部件之間約束的制約關系,這種制約關系代表了在拆裝過程中的先后順序。
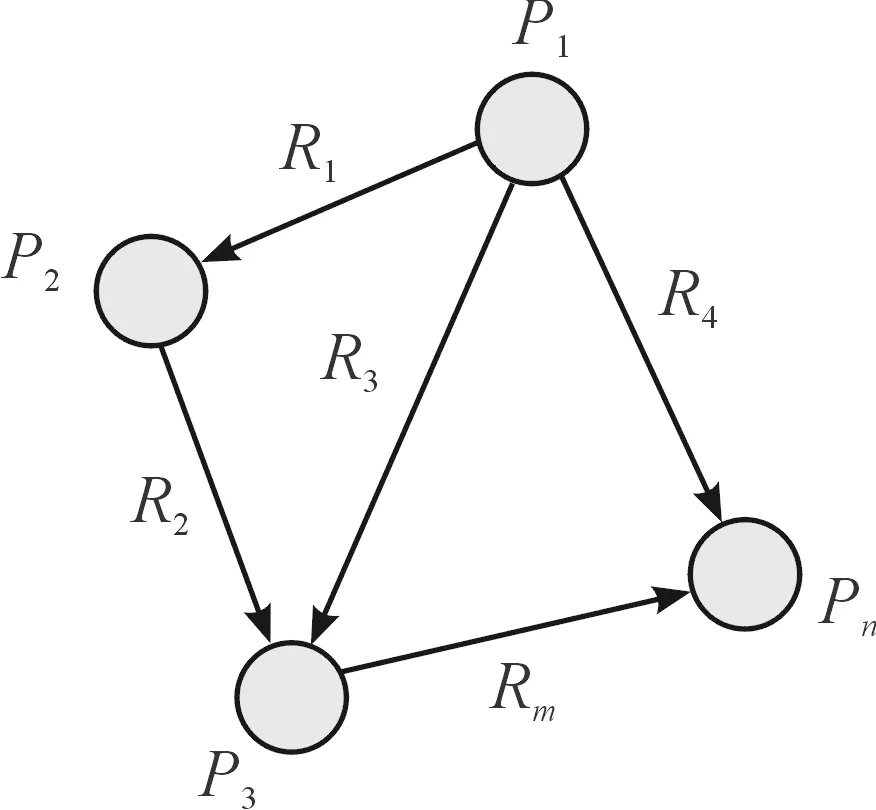
圖3 約束信息模型
本文主要針對機械產品的維修過程進行研究,針對實際維修過程中常見的一些約束關系進行定義,將維修作業的約束模型定義如下:
遮擋約束,這種關系是單向性的,兩部件之間既可以有物理連接,也可以沒有,但是要拆除第二個部件,必須先拆除第一個部件,從空間結構看,這種約束實質由外到里的一種遮擋關系,使得維修作業不能順利的進行,假設部件A與部件B構成遮擋關系,且為部件A擋住部件B,那么要拆除部件B就必須先拆除部件A,如果以R(A,B)表示兩部件間的約束關系,那么R(A,B)只表示部件A對部件B的遮擋約束,不能表示部件B對部件A的遮擋約束關系,部件B對部件A的遮擋約束表示為R(B,A),且R(A,B)≠R(B,A),將遮擋約束記為R1。
固定約束,也是一種單向關系,表示一個部件固定在另一個部件上,通常這種關系的維持需要依靠螺栓、螺母等緊固件(有的緊固件包含在某個部件中),這種約束關系,無論是哪個部件需要被拆除,都必須先解出這種約束關系,即無論是部件A固定部件B,還是部件B固定部件A,需要拆卸這兩個部件中的任何一個,都需要先解出部件之間的固定約束關系,以R(A,B)表示部件A固定部件B這一約束關系,以R(B,A)表示部件B固定部件A的約束關系,有R(A,B)≠R(B,A),將固定約束記為R2。
套裝約束,單向約束,即兩部件不存在相互套裝的情況,假設部件A套裝在部件B上面,那么要拆卸部件B,就必須將部件A移除,以R(A,B)表示部件A套裝在部件B上面這一約束,以R(B,A)表示部件B套裝在部件A上的約束關系,且R(A,B)≠R(B,A),將套裝約束記為R3。
連接約束,這是一種雙向約束,連接約束需要通過介質建立,在拆卸過程也是對介質的解除過程,以R(A,B)表示部件A和部件B的連接約束,以R(B,A)表示部件B和部件A的連接約束,則R(A,B)=R(B,A),將連接約束記為R4。
插接約束,這是一個單向約束,表示兩個部件之間的約束關系是通過兩部件自身的配合維持,不需要其他如螺栓、緊固件等介質支持。且不存在兩部件相互插裝的關系,若部件A插裝在部件B上,那么無論拆卸哪個部件,都需要先將插裝約束解除才能進行下一步操作。插裝約束主要針對電子設備中的電路板或者帶有插口的電纜。若以R(A,B)表示部件A插接在部件B上,R(B,A)表示部件B插接部件A上,有R(A,B)≠R(B,A),將插接約束記為R5。
2.2 帶有約束信息模型的結構樹模型構建
通過結構樹能直觀的展示待維修對象的層次關系,構成了維修對象的基本信息模型。能很好的表現產品的設計意圖及結構信息,因此具有結構清晰、維護簡單的優點,但是該結構對各部件之間的配合約束關系描述不直觀,不能體現零件之間,上下級之間的約束關系,在傳統結構樹構建的基礎上,將約束信息模型加入到結構樹中,在結構樹的層級連接關系上加入約束信息,結構樹本身就蘊含有可行的維修作業信息,將約束信息添加到結構樹中,從而根據帶有約束信息的結構樹進行產品的維修作業規劃,得到切實可行的維修裝配序列。
將表達約束信息的模型與結構樹模型相結合,構建維修作業規劃模型。維修作業規劃模型構建方法如下:
1) 構建產品的結構樹模型。結構樹構建到那一層級主要根據維修的需求,在維修中,根據維修方法的不同,維修分為換件維修和修復維修,換件維修將產生故障的部分從產品中拆下,換上新的部件或零件的維修過程。這種維修方式需要將最小維修單元拆下,因此結構樹的葉節點就是最小維修單元;修復維修是指產生故障的部件不需要拆卸,原位進行修理即可完成維修,這種方式下最小維修單元不需要被拆卸下來,這時結構樹的葉節點為最接近最小維修單元不拆卸單元。結構樹的根節點是產品,中間節點是拆卸部件,葉節點根據維修方式確定。
2) 模型層次劃分。為更好的表現結構樹的層級關系,便于后續的維修作業規劃,需要對模型進行層次劃分,產品的層次關系通常是系統—分系統—總成—部件—零件,對于結構樹,構建的層次是為后續的拆裝規劃服務,因此,模型的層次關系劃分應該以產品—拆裝部件—下層拆裝部件—最小拆裝單元為準。可以看出,結構樹的層次關系根據產品結構關系,逐層分解,直至最小拆裝單元。
3) 添加約束信息。在實際的維修過程中,通常是將相關零部件作為一個整體拆卸下來,再以拆下的整體部分作為拆卸對象進行拆卸,在進行結構樹的構建時,基于實際的維修過程,對結構樹的構建也是基于這個思想,并根據物體的結構進行層級劃分,對處于同一個層級的零部件,之間存在約束關系,不同層級之間的零部件也存在約束關系。因此,可以將零部件之間的約束信息標注在兩部件之間的連線上,以約束編號作為標識標注在結構樹上,不同層級之間的約束信息如圖4所示,統一層級零部件的約束信息模型如圖5所示。
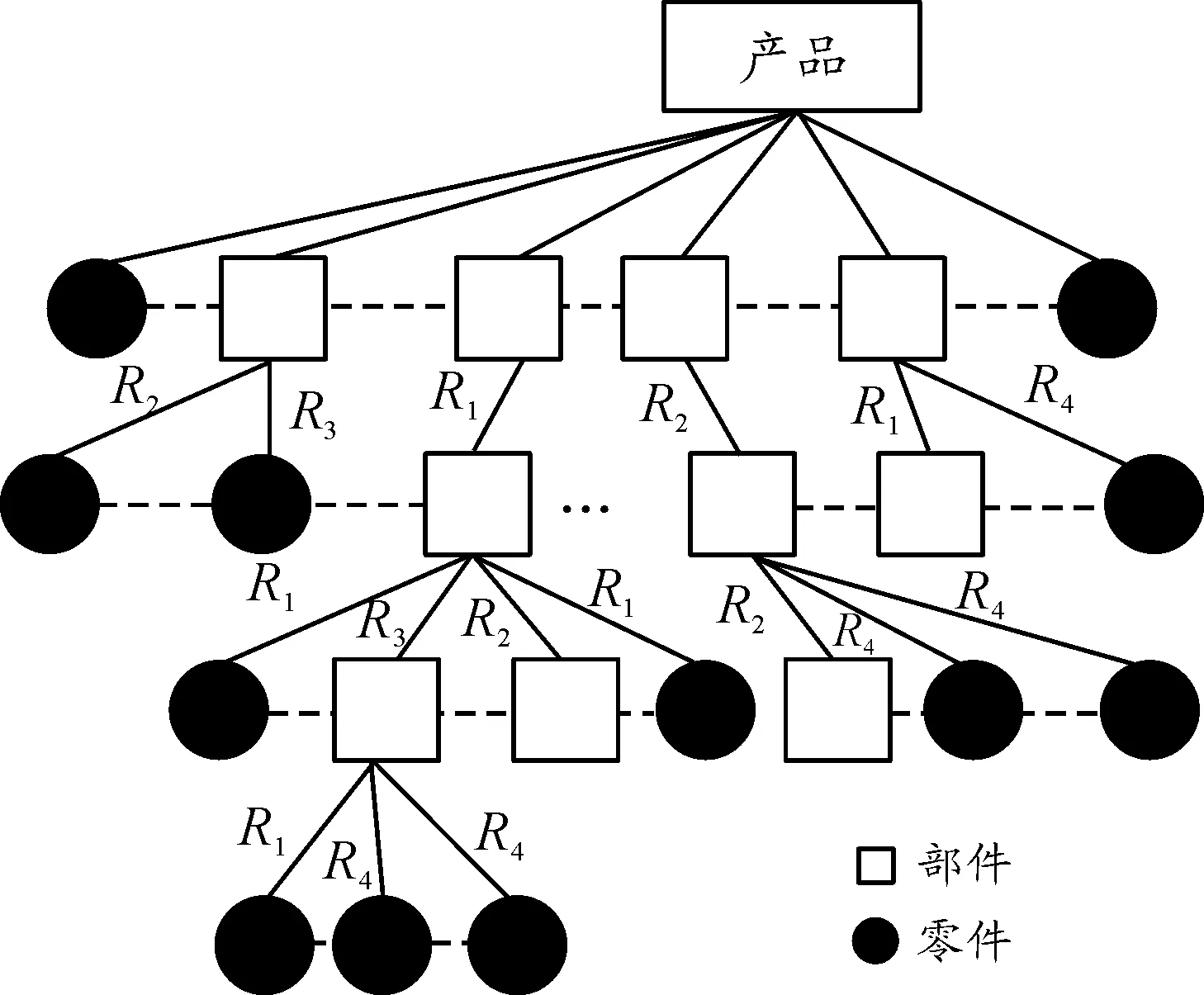
圖4 帶有約束信息模型的結構樹
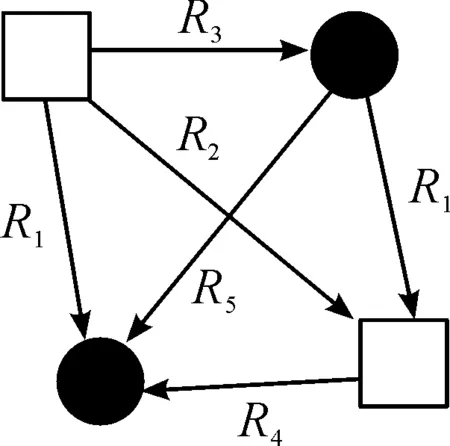
圖5 同一層級零部件的約束信息模型
3 基于結構樹的維修作業規劃
從形式上對維修進行劃分,可以分為整體拆卸和目標拆卸,添加了約束信息的結構樹模型本身隱藏了一部分可行的拆裝序列,如何將這部分拆裝序列提取出來,需要進行序列規劃。在進行序列規劃之前,對跳躍拆卸路徑的概念進行說明。
1) 跳躍拆卸路徑
在有些修復性維修的目標拆卸中,基于最小拆卸的原則,對不需要拆卸的部分盡量保留,減少拆卸動量。因此在拆卸規劃的過程中,可能出現跨越層級的拆卸路徑,這種跨越層級的路徑稱為跳躍拆卸路徑。如圖6對P212的拆卸,按照結構樹的拆卸路徑為P2—P21—P212,如果作為目標拆卸,那么跳躍拆卸路徑為P2—P212,即要拆卸P212,在拆卸P2以后直接拆卸,不需要對P21進行拆卸。這種方式在保證目標拆卸的同時,較少了拆卸的動量。
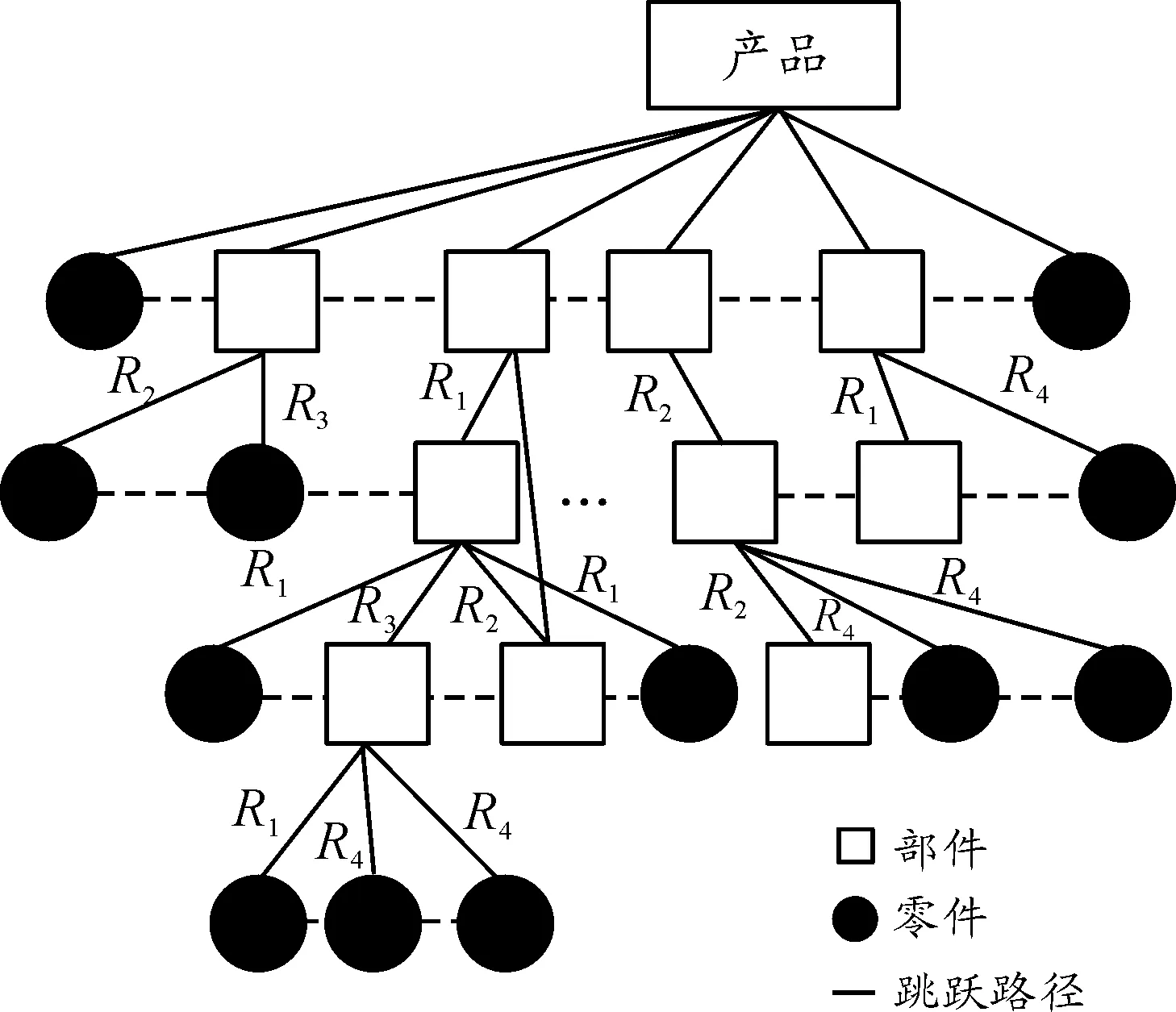
圖6 跳躍路徑規劃
2) 目標拆卸序列規劃
所謂目標拆卸是指在維修中,以故障點的部件或零件為拆卸目標,在盡量少的拆卸步驟下完成對目標的拆卸,不需要拆卸的部件盡量保留,因此,對于此類拆卸序列規劃不一定完全按照總成—部件—組件—零件的順序進行拆卸序列規劃,只需要將拆卸目標件所必須的約束關系解除就行。而不需要將所有的零部件全部拆除。也就意味著對某個目標件的拆卸,不需要將該件的父節點拆卸下來,再解除父節點下的約束關系。而是可以直接從父節點的上一層直接到目標件,這種情況下就涉及到跨越層級進行拆卸,這中跨越層級的拆卸路徑稱為跳躍拆卸路徑,如果不存在跨越層級的情況,就根據結構樹模型直接搜索拆卸路徑。拆卸算法如下:
① 指定目標拆卸單元;
② 判定拆卸目標拆卸單元父節點位置(是否為根節點);
③ 如果是,根據結構樹模型中第一層級的約束信息模型對目標單元進行拆卸規劃;
④ 如果不是,直接按照結構樹模型搜索拆卸序列;
⑤ 判斷步驟4中,是否存在跳躍拆卸路徑;
⑤ 如果存在,給出基于跳躍拆卸路徑下的拆卸序列;
⑦ 如果不存在,按照步驟4,進行拆卸序列規劃,得到最終的拆卸序列。
算法流程圖如圖7所示。
3) 整體拆卸序列規劃
整體拆卸序列規劃,采用基于結構樹模型,結合約束信息模型的順序遞歸算法。以圖2為例,對算法具體流程說明如下:
① 確定結構樹各節點對應的拆卸單元;如產品拆卸的第一層為P1、P2等,節點P2經過拆卸后形成節點P21、P22、P23;其中父節點的拆卸優先于子節點,根節點優先于中間節點,中間節點優先于葉節點。
② 確定各拆卸層級上各節點的拆卸順序;如確定P221、P222的拆卸順序;
③ 由根節點開始,逐層向下至葉節點,遞歸形成拆卸序列。
通過以上算法能得到圖2的拆卸的順序如下:
(P1,P2,P3,P4)→(P21,P22,P23,P41,P42)→
(P221,P222,P411,P412,P413)
上述算法給出了不同層級之間的拆卸順序,但是對于同一層級內的拆卸單元拆卸先后順序沒有指出,對于同一層級內的拆卸單元,根據約束信息模型進行序列規劃。最終得到完整的拆卸序列。
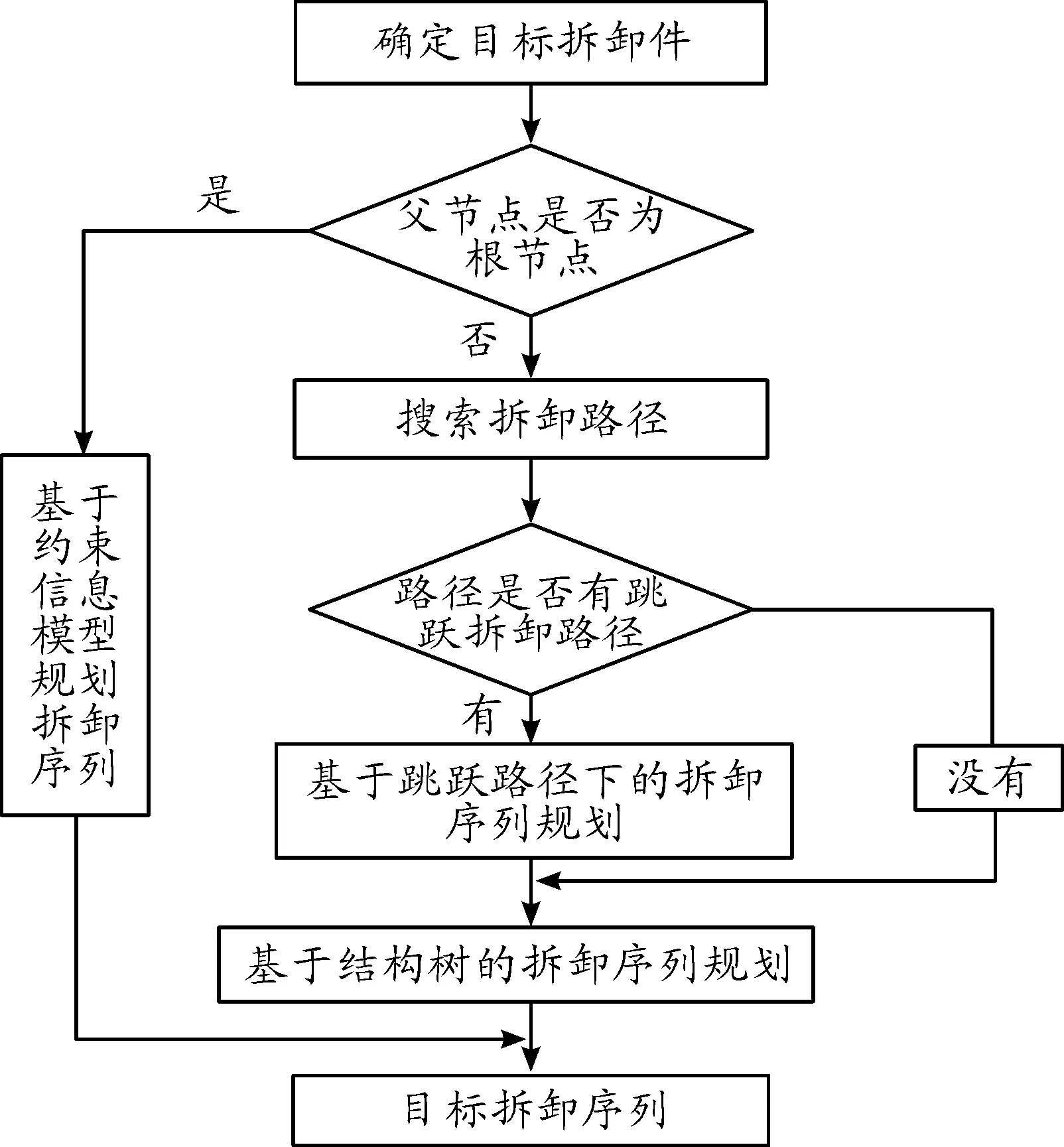
圖7 目標拆卸算法流程
4) 維修作業規劃
維修作業過程不僅需要知道需要拆卸的零部件名稱及其順序,還需要對每一步所需使用的工具進行說明,上述基于結構樹已經對維修過程中零部件的拆裝序列進行了規劃,但是對于每一步是否需要使用工具、使用什么工具沒有說明,本節就維修過程中的工具使用進行規劃。并結合序列規劃形成完整的維修作業流程。
在本文的結構樹中,零部件之間的連接采用的是零部件之間的約束,根據相關文獻,將零部件之間的約束歸為五類,因此,工具的選擇可以根據約束的種類決定,例如插接約束一般不需要工具,在進行該步驟時使用雙手即可;連接約束一般式螺栓、螺紋連接,這時需要起子等工具輔助拆裝。根據下一步的約束類型,判斷該工具是放回還是繼續使用,或者更換工具,對每一步進行判定,形成工具使用序列。
將工具使用序列賦予拆裝序列中,對拆裝序列中的每一步添加工具使用情況,是否使用工具,使用什么工具,下一步驟工具是否需要更換或者不需要工具,都詳細的添加在拆裝序列中,形成完整的維修作業流程。
4 實例驗證
本文以某減速器為例對算法進行驗證,圖8為減速器簡化模型。
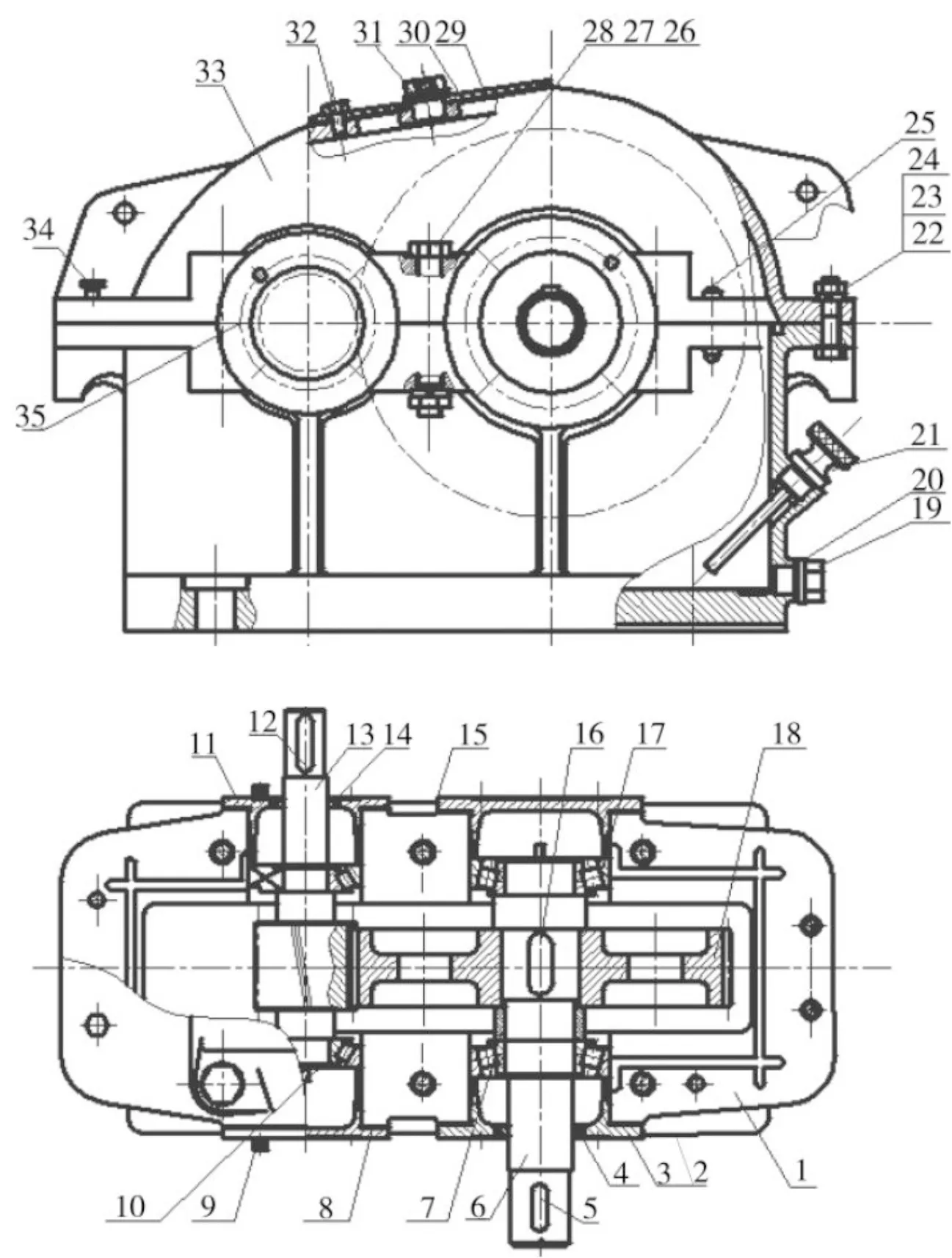
1.機體;2.調整墊片;3.軸承蓋1;4.骨架油封;5.鍵1;6軸;7.調整環;8.調整墊片;9.螺釘;10.軸承3;11.軸承蓋3;12.鍵2;13.齒輪軸;14.油封;15.軸承蓋2;16.鍵2;17.軸承2;18.大齒輪;19.油塞;20.油封圈;21.油尺;22.螺栓;23.螺母;24.墊片;25.銷;26.螺栓;27.螺母;28.彈簧墊片;29.墊片;30.視孔蓋;31.通氣罩;32.螺釘;33.機蓋;34.起蓋螺釘;35.軸承蓋4
圖8 減速器簡化模型
根據簡化模型,可以將減速器的主要零部件有:機體,機蓋,軸承,齒輪,鍵等,以及其他的緊固件,可以得到減速器帶有約束信息模型的結構樹,如圖9所示。
在減速器的結構樹模型中,第一層內部的零部件之間有約束關系,第2層級、第3層級第4層級內部的零部件沒有約束關系,對第1層級的約束信息模型構建如圖10所示。
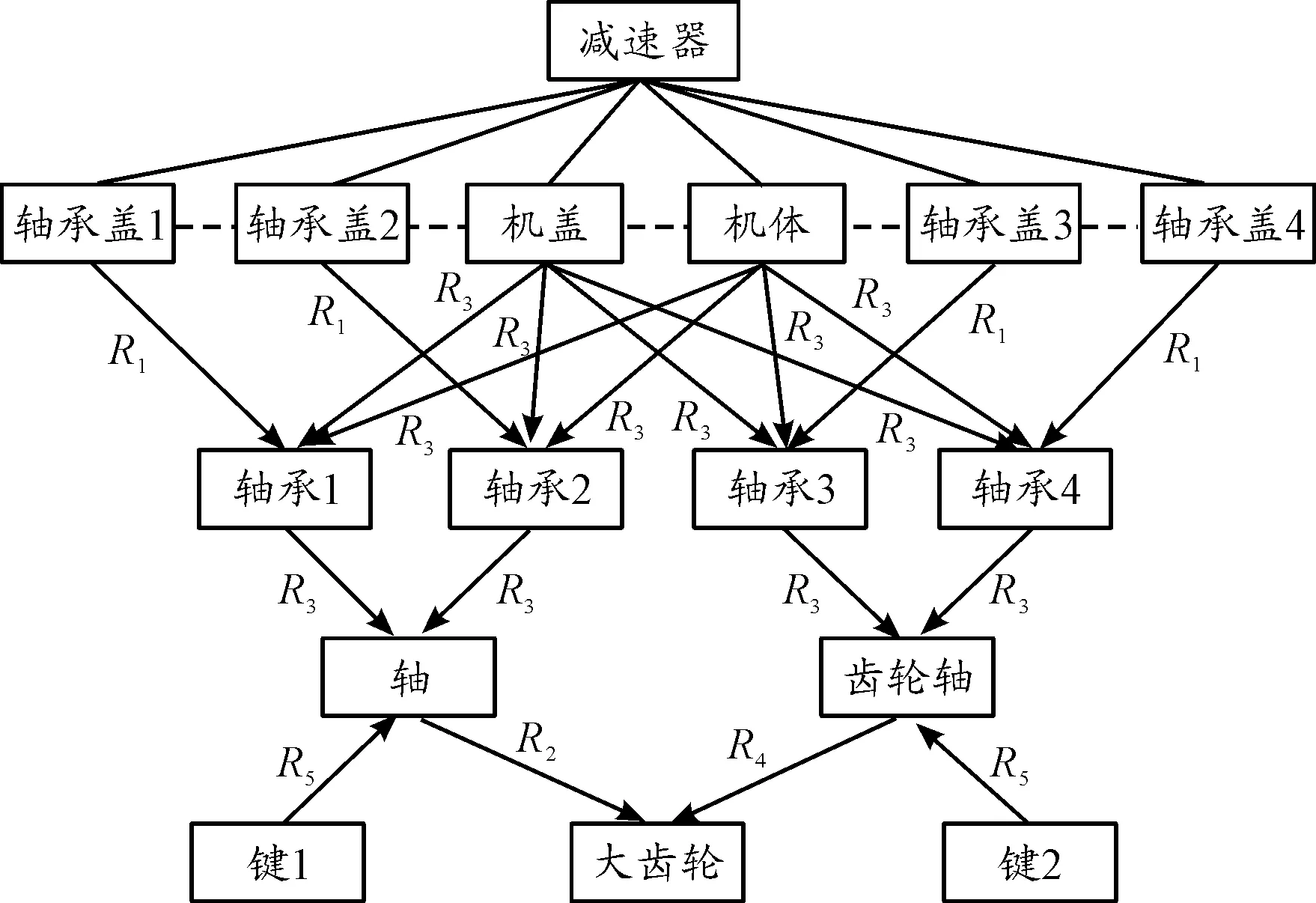
圖9 減速器結構樹模型
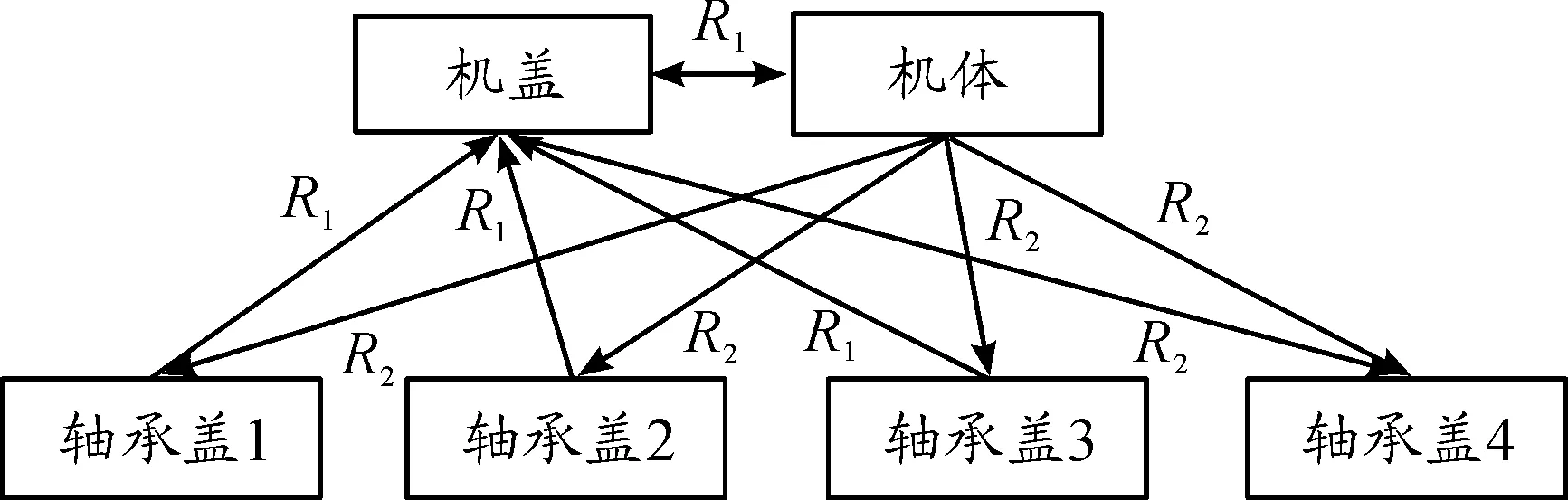
圖10 第1層級內部約束信息模型
以大齒輪受損故障為例進行拆裝序列規劃,大齒輪受損,需要更換大齒輪,采用目標拆卸算法進行拆卸序列規劃:
父節點不是根結點,因此直接根據結構樹模型進行序列規劃;
不存在跳躍路徑問題,按照結構樹層級關系確定路徑;
根據層級內部的約束信息模型確定層級內的先后順序,第1層級內的零部件拆卸順序為:軸承蓋1→軸承蓋2→軸承蓋3→軸承4→機蓋;
得到大齒輪拆卸的序列為:
軸承蓋1→軸承蓋2→軸承蓋3→軸承蓋4→機蓋→(軸承1,軸承2)→軸→大齒輪
由于軸承1與軸承2之間無約束關系,因此兩者無先后順序,最終的拆卸序列為:
軸承蓋1→軸承蓋2→軸承蓋3→軸承蓋4→機蓋→軸承1→軸承2→軸→大齒輪
由于裝配與拆卸是可逆的,因此拆卸的逆序為裝配的序列:
大齒輪→軸→軸承2→軸承1→機蓋→軸承蓋4→軸承蓋3→軸承蓋2→軸承蓋1
根據減速器的結構樹模型,軸承蓋與機體之間是采用螺釘連接的,因此對于此類約束需要起子工具,機蓋與與機體之間也是螺釘連接,同樣需要工具,軸承與軸之間是套裝約束,直接用手即可完成拆裝,不需要工具,大齒輪與軸之間通過鍵連接,也不需要工具即可完成拆裝,因此,得到齒輪受損的維修作業流程如圖11所示。
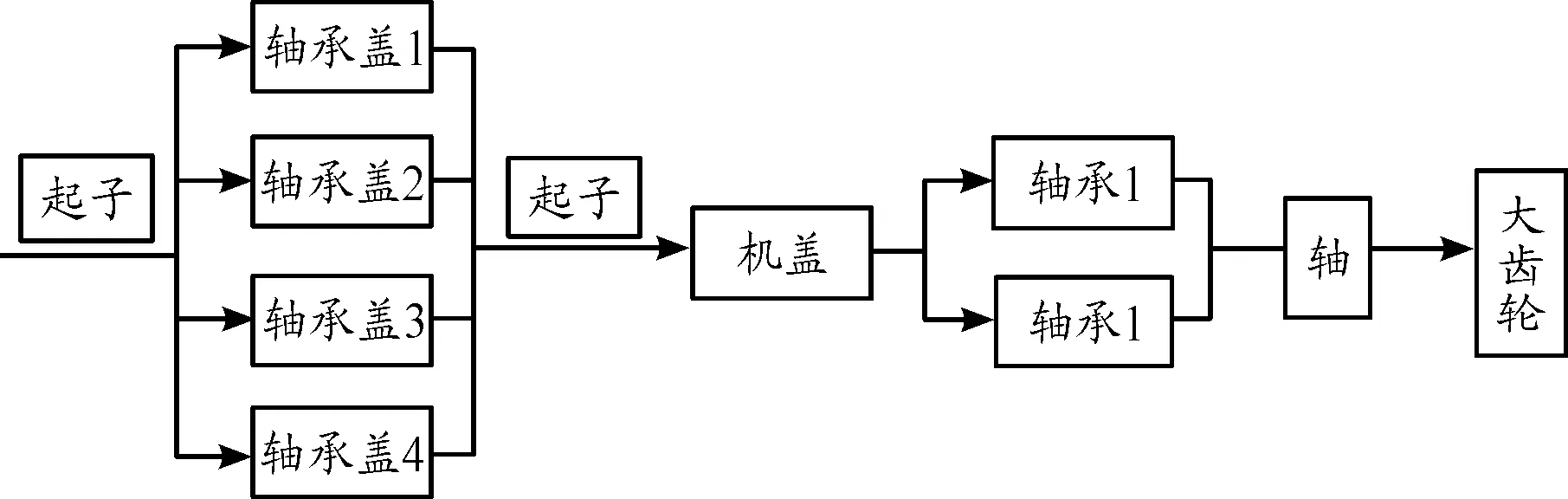
圖11 齒輪拆卸維修作業流程
5 結論
采用帶有約束信息模型的結構樹對零部件的拆裝路徑進行規劃,相對于其他規劃算法,簡單直觀,規劃的拆裝路徑科學可行,能直接得到每一步需要的拆卸工具,大大簡化了拆裝序列規劃的流程,提高了規劃效率,
該方法現階段只能針對具有約束關系的產品進行序列規劃,對于電子器件無法進行規劃。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
中國衛生(2016年2期)2016-11-12 13:22:16
光學精密工程(2016年6期)2016-11-07 09:07:19