交會測量敏感器脈沖編碼激光控制系統設計
2019-04-02 09:31:20崔家瑞李希勝
實驗室研究與探索 2019年2期
崔家瑞, 許 震, 李 擎, 李希勝, 楊 旭
(北京科技大學 a. 自動化學院; b. 工業過程知識自動化教育部重點實驗室, 北京 100083)
0 引 言
交會測量敏感器為空間交會對接的關鍵技術,用于高精度測量從150 m開始到兩對接機構相互接觸這段距離范圍內,目標飛行器和追蹤器的相對位置、速度、姿態角和姿態角速度等。主要有主動式和被動式兩種。主動式是指目標飛行器主動連續發射激光,追蹤器通過捕捉目標飛行器的特征光點計算相對位置。被動式是指目標飛行器不需要發射激光,只需要安裝一個角反射鏡(合作目標),由追蹤器發射激光,并捕捉角反射鏡反射回來的特征光點計算相對位置[1-2]。主動式相對于被動式具有功耗大、負荷重等缺點,目前,絕大多數采用被動式[3]。
典型的被動式敏感器主要由光學系統、激光控制系統、CCD像機和機載計算機組成。其工作原理如下:激光控制系統控制激光器發送連續激光,然后,激光通過光學分束鏡反射到目標航天器上,由目標航天器的合作目標反射回來,透過光學分束鏡直接進入CCD像機成像,并由機載計算機通過求解兩航天器間的相對位姿[4]。
本文考慮到連續激光容易受太陽光和恒星光干擾和進一步降低敏感器功耗的問題,采用對激光器發光過程進行編碼的方式,研制了用于被動式交會對接敏感器的脈沖編碼激光控制系統,并通過不同頻率下的脈沖發光實驗,驗證了控制系統的有效性。
1 脈沖編碼激光控制系統硬件設計
脈沖編碼激光控制系統主要包括微控制器模塊、二次電源模塊、溫度控制模塊、恒流控制模塊、基準電源模塊、脈沖編碼模塊和通信模塊。系統整體框圖如圖1所示。
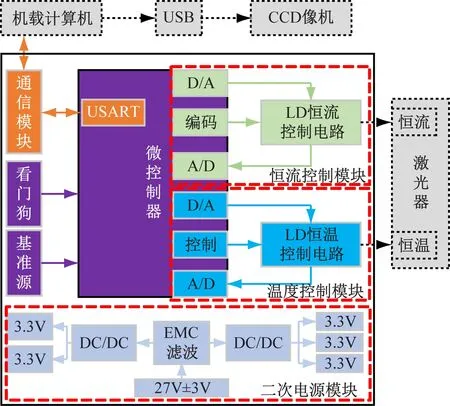
圖1 脈沖編碼激光控制系統整體框圖
整個系統以微控制器為核心,由微控制器按照設定的脈沖編碼格式控制激光器工作在脈沖模式,并保證激光器的工作溫度和電流持續穩定。與此同時,微控制器將激光器工作模式通過通信模塊傳輸給機載計算機,保證CCD像機圖像采集時序與激光器脈沖編碼時序同步。
1.1 溫度控制模塊
激光器工作溫度是影響其特性的重要參數之一[5-6]。溫度控制模塊采用微控制器的A/D和D/A實現對激光器工作溫度的實時采集與設定,并通過閉環形式控制溫度控制模塊的啟停。溫度控制模塊原理如圖2所示。激光器的工作溫度和TEC兩端最大電壓通過微控制器D/A來設置。微控制器通過D/A轉換,將機載計算機設置的激光器溫度和TEC兩端最大電壓轉換為模擬信號,分別輸入到LD溫度控制芯片的TEMPSP和TECCRT腳。設置電壓與溫度的關系為
T=6U+15
(1)
式中:T為目標溫度;U為設置電壓。
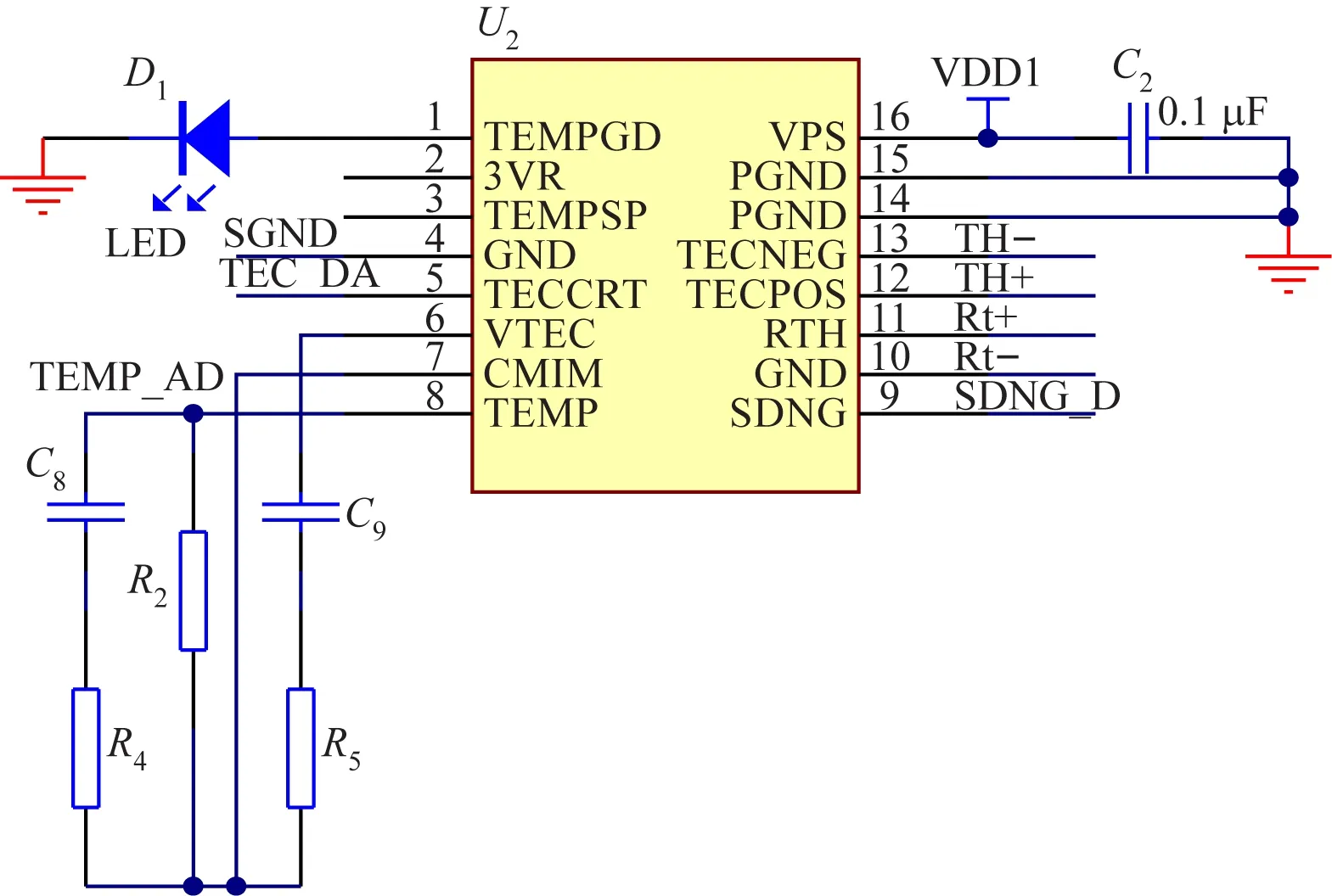
圖2 溫度控制模塊原理圖
TEC兩端最大電壓為
Utec_max=2.5×10K/(10K+R3)
(2)
該模塊能為熱電制冷器提供1.65 A的驅動電流,可以獲得超過90%的效率,設置溫度范圍在15~35 ℃。根據芯片datasheet的資料,在-40~125 ℃的工作溫度范圍內,溫度穩定性最高可達0.01 ℃,在工作溫度范圍內25 ℃溫差穩定時間可以控制在20 s。
TEMP_AD和VTEC_AD腳分別用來監測激光器的實際溫度和TEC兩端的電壓。若監測到激光器溫度不滿足(25±5) ℃,則微控制器將啟動TEC來制冷或制熱;若監測到TEC兩端電壓>2.5 V,則關閉溫度控制芯片,防止激光器的損壞。
本設計中,溫度設置為25 ℃,TEC兩端最大電壓為2 V。
1.2 恒流控制模塊
激光器工作電流的穩定性直接影響其波峰的波長位置[7-8],需要與濾光片配合使用。恒流控制模塊采用微控制器的A/D和D/A實現對激光器工作溫度的實時采集與設定,并通過數字端口實現恒流控制模塊按編碼脈沖輸出電流。恒流控制模塊原理圖如圖3所示。激光器的電流通過微控制器D/A來設置。隨著設置電壓的變化,恒流控制芯片的輸出電流也會線性改變,從而驅動激光器工作,電壓與電流的關系為
I=2Ulis/2.5
(3)
恒流控制芯片本身具有電流監測能力,因此,不需要單獨的電流監測模塊,只需利用微控制器A/D采集芯片輸出,即可獲得激光器實際工作電流。監測電壓與實際電流的關系為
Ulio=2.5I/2
(4)
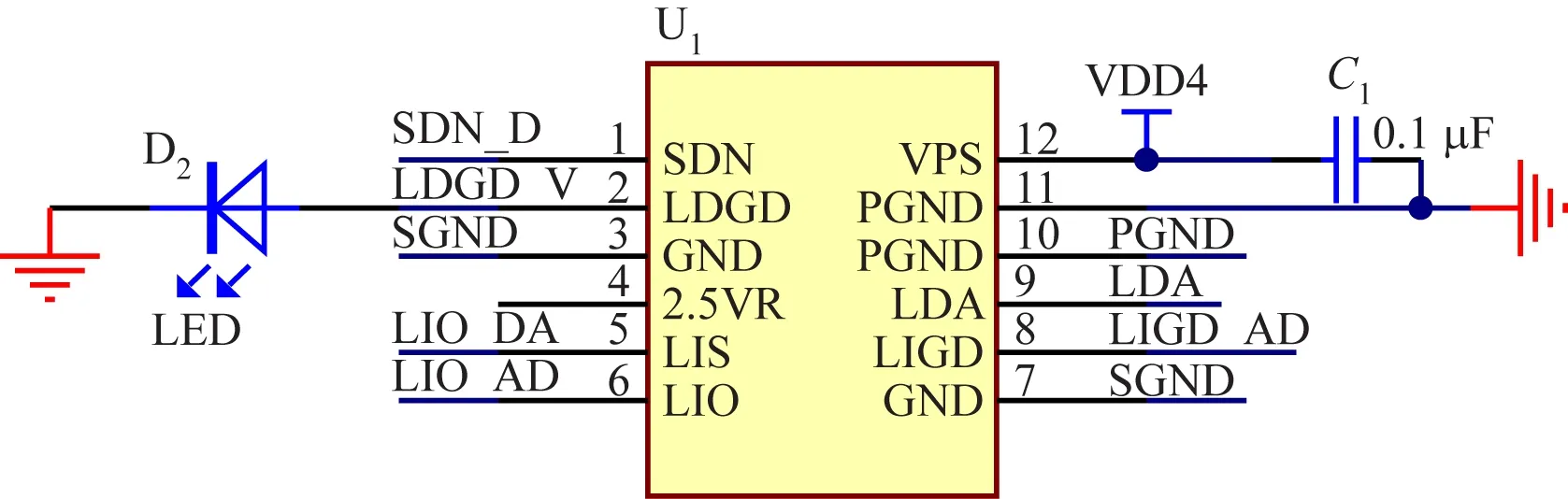
圖3 恒流控制模塊原理圖
該電路能為激光器提供最大約2 A的驅動電流,效率大于90%,啟動時間為4 ms。根據芯片datasheet
的資料,該芯片輸出電流的穩定度可達0.05%,調節精度可達±0.2%。并且,芯片內置了保護電路,當溫度異常或者電流過大時,芯片會自動關閉,直到異常狀態消失。
為了更好地保護激光器,設計了過流保護和過壓邏輯。LIO_AD用于監測激光器的實際電流,當電流過大時,微控制器控制SDN_D腳,關閉恒流控制芯片,LIGD_AD用于監測激光器的供電電壓,當電壓過大時,微控制器控制SDN_D腳,關閉恒流控制芯片,從而起到了保護激光器的作用。
本設計中,電流保護閾值為600 mA,電壓為2 V。
1.3 二次電源模塊
二次電源模塊[9-10]主要為敏感器提供各種電壓等級的電壓源和電流源,原理圖如圖4所示。
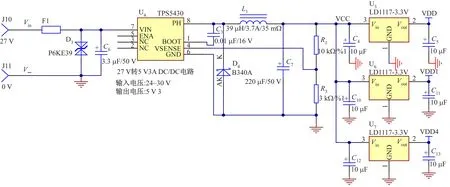
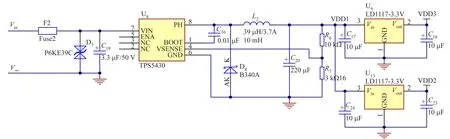
圖4 二次電源模塊原理圖
由于機載電源的規格為直流(27±3)V,因此,設計了24~30 V的寬電源輸入范圍的二次電源模塊,輸出為5 V和3.3 V。
該電源模塊首先將輸入電壓通過DC/DC模塊轉換為5 V電源,然后再通過LDO轉換為系統需要的3.3 V。DC/DC模塊的輸出電流可達3 A,兩個可以輸出6 A的電流,通過LDO后,有5路3.3 V電源,VDD、VDD1和VDD4可以提供最高1 A的電流,用來給微控制器和恒流控制模塊供電;VDD2和VDD3最高可以提供1.5 A的電流,用來給溫度控制模塊供電,能夠讓溫度控制芯片的輸出電流達到1.5 A < 1.65 A的最高電流,同時保護了激光器不受損壞。
輸入電壓通過了保險絲和P6KE39C,同時保護了系統和母線電壓。保險絲需要選用8~10 A的規格。
另外,為了保證電源的穩定性,在每個芯片的電源處增加了濾波電容和旁路電容。
1.4 基準電壓源模塊
基準電壓源模塊主要為微控制器的A/D、D/A、溫度控制模塊和恒流控制模塊提供參考電壓,原理圖如圖5所示。
該電路提供2.048 V的參考電壓源,保證了激光器兩端的電壓不會超過2.5 V。在-40~125 ℃工作溫度范圍內,該參考電壓源的精度最高可達0.05%。
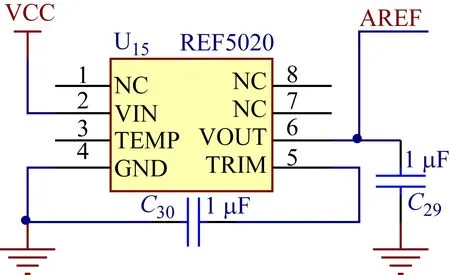
圖5 基準電壓源模塊原理圖
1.5 通信模塊
該模塊通過RS-232和RS-422與機載計算機和其它設備,原理圖如圖6所示。
通過RS-232與機載計算機通信時,主要功能為接收機載計算機的命令,通知機載計算機捕獲圖像,并且將激光器的相關信息,如電壓、電流、溫度等發送給機載計算機。
1.6 微控制器模塊
微控制器選用了Atmel公司的8位精簡指令集系統的AVR 系列芯片[11-12]。模塊主要包括最小系統電路和外置看門狗電路,原理圖如圖7所示。
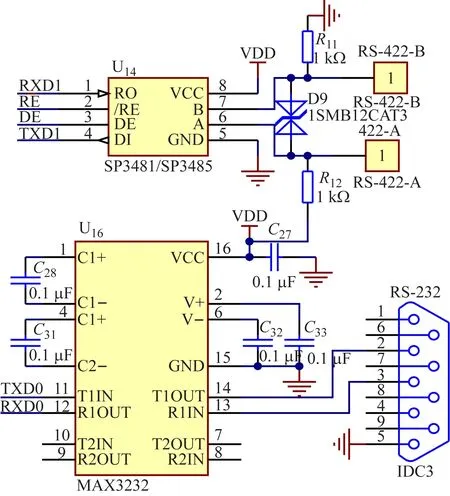
圖6 通信模塊原理圖
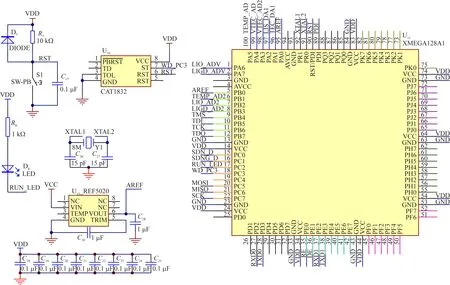
圖7 微控制器模塊原理圖
該模塊首先通過RS-232與機載計算機通信,接收機載計算機的命令,然后控制激光器發出脈沖編碼的激光,通知機載計算機進行同步,并且將激光器的相關信息,如電壓、電流、溫度等發送給機載計算機。由于該微控制器集成了12位A/D和D/A,因此節省了成本和電路的復雜度,提高了系統的可靠性。同時,該模塊要監測激光器的電壓、電流和溫度,保護激光器不受損壞。
另外,上電和程序跑飛時,微控制器的狀態是不確定的,無法進行系統控制工作。因此需要一個非屏蔽外部復位信號[13-14],將微控制器置入一個已知的狀態。為了使系統被復位信號正確的初始化,復位信號的脈沖寬度必須至少200 ms。設計中采用一片安森美公司的微控制器監控電路CAT1832。主要完成以下功能:① 電路上電及異常時產生一個長達250 ms的復位信號。② 當其看門狗輸入端1.2 s仍無變化時,其看門狗輸出端將變低。這樣當CPU程序異常跑飛時,CAT1832將對其復位。③ 實現手動復位(地面試驗用),產生至少250 ms的低電平復位脈沖。④ CAT1832復位信號和手動復位都能使CPU復位。
2 系統軟件設計
系統軟件采用有限狀態機模型[15],利用信號流圖的形式來描述。系統軟件的信號流圖如圖8所示。
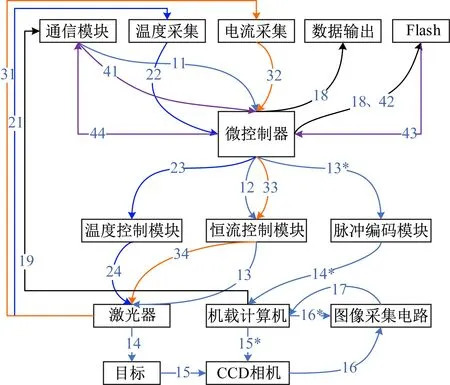
圖8 系統軟件信號流圖
由信號流圖確定的核心任務主要有:
(1) 通信模塊通過圖8中(11)到達微控制器,微控制器通過(12)恒流控制模塊,恒流控制模塊通過(13)控制激光器,這時微控制器通過(13)啟動脈沖編碼模塊,脈沖編碼模塊通過(14)控制機載計算機,激光器通過(14)發出脈沖式激光,激光照射到目標上,目標通過(15)將激光反射到CCD相機上,機載計算機通過(15*)控制CCD相機進行曝光,同時通過(16*)啟動圖像采集電路采集圖像,圖像數據通過(16)進入圖像采集電路,再通過(17)進入機載計算機, 機載計算機對數據進行處理后,輸出到相關的顯示設備上,同時通過(19)傳輸給微控制器,由微控制器通過(18)進行數據輸出,并存儲到Flash上,至此,該條信號流完成;該條信號流主要完成通過通信模塊控制敏感器相關動作。
(2) 通信模塊通過(41)到達微控制器,微控制器通過(42)到達Flash,再通過(43)返回到微控制器,最后,通過(44)進入到通信模塊,該條信號流主要完成對敏感器保存的數據和相關日志進行讀取和相關參數的設置等功能。
(3) 激光器溫度控制信號流。首先激光器溫度通過(21)進入溫度采集模塊,溫度采集模塊轉成數字信號后通過(22)送入微控制器,微控制器處理后通過(23)進入溫度控制模塊,最后通過(24)控制激光器溫度。
(4) 激光器脈沖編碼恒流控制信號流。首先激光器實際電流值通過(31)進入激光器電流采集模塊,轉成數字信號后通過(32)送入微控制器,微控制器處理后通過(33)進入恒流控制模塊,最后通過(34)控制激光器電流大小及開關狀態。
3 脈沖編碼設計
脈沖編碼[4,16]的設計需要考慮系統功耗要求、抗干擾性要求、機載計算機的計算能力和激光器的響應速度等。雖然激光器響應的最快頻率可達50 Hz(由恒流控制芯片的脈沖響應時間決定),但是受到CCD像機響應速度和穩定度的影響,最高的脈沖周期為160 ms。計算方法如下:
CCD像機采集1幀圖像(1 280×960)的時間為60 ms,為了保證圖像的穩定,需要留出上升和下降時間,由實驗數據可知,上升和下降時間都為6 ms,因此,保證圖像正確采集的圖像最小保持時間為60+6×2=72 ms,考慮裕量,設定上升時間和下降時間為10 ms,這樣,采集1幀圖像的時間為60+10×2=80 ms,所以脈沖編碼的周期為80×2=160 ms,考慮到系統的自身延時,最高的脈沖周期可達200 ms(5 Hz)。
本方案脈沖周期默認為1 Hz,占空比默認為0.5。編碼控制時序圖如圖9所示。
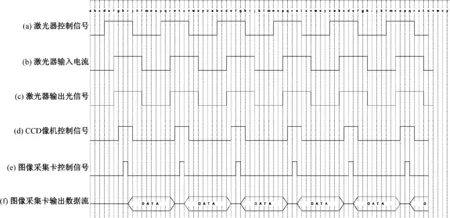
圖9 脈沖編碼控制時序圖
3.1 5 Hz脈沖編碼設計
5 Hz編碼時,占空比最低為80 ms/200 ms=0.4,最高為1,考慮到機載計算機圖像處理的方便性,需要在激光關閉的時候采集背景圖,最高占空比為120 ms/200 ms=0.6。因此,采用5 Hz編碼時,占空比的取值范圍為0.4~0.6。本方案占空比可選,占空比默認為0.5。
3.2 1 Hz脈沖編碼設計
1 Hz編碼時,占空比最低為80 ms/1 000 ms=0.08,最高為1(連續發光),考慮到機載計算機圖像處理的方便性,最高占空比為920 ms/1 000 ms=0.92。因此,采用1 Hz編碼時,占空比的取值范圍為:0.08~0.92。本方案占空比可選,占空比默認為0.5。
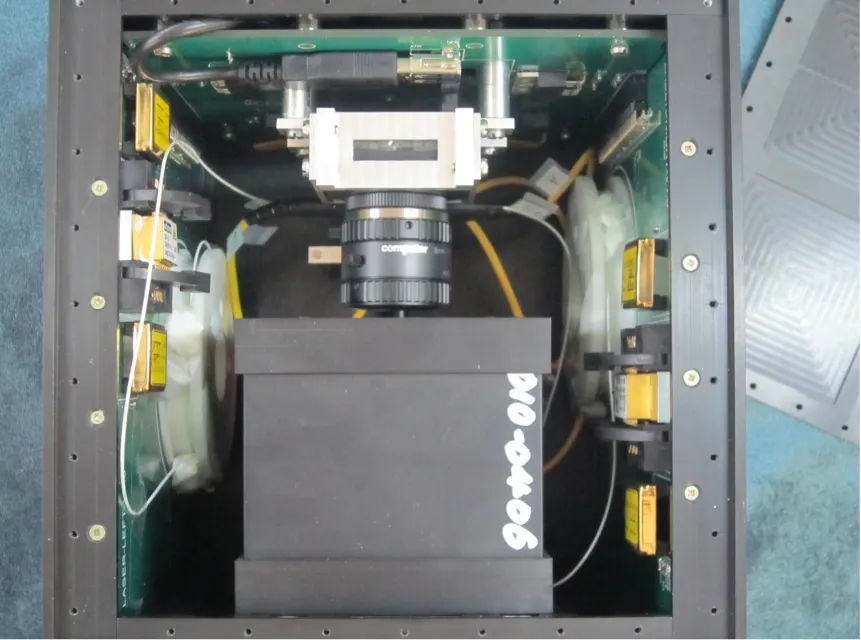
4 實驗測試
在實驗室環境下,采用Tektronix TDS3023B型號示波器對1 Hz和5 Hz條件下的激光脈沖波形、激光脈沖上升時間以及系統控制信號與激光脈沖間的傳輸延遲時間進行了實驗測試。研制的脈沖編碼激光控制系統實物如圖10所示。
4.1 1 Hz激光實驗
(1) 激光脈沖波形實驗。對1 Hz脈沖周期的檢測,測得的波形如圖11所示。由圖11可知,每個周期的長度為(0.992 9±2.309 4×10-4)s,相應的頻率為(1.007 1±2.342 1×10-4)Hz;高電平的幅值為(0.485 7±0.014 9)V;低電平的幅值為(0.001 9±0.012 1)V。具體統計信息分比如表1~3所示。
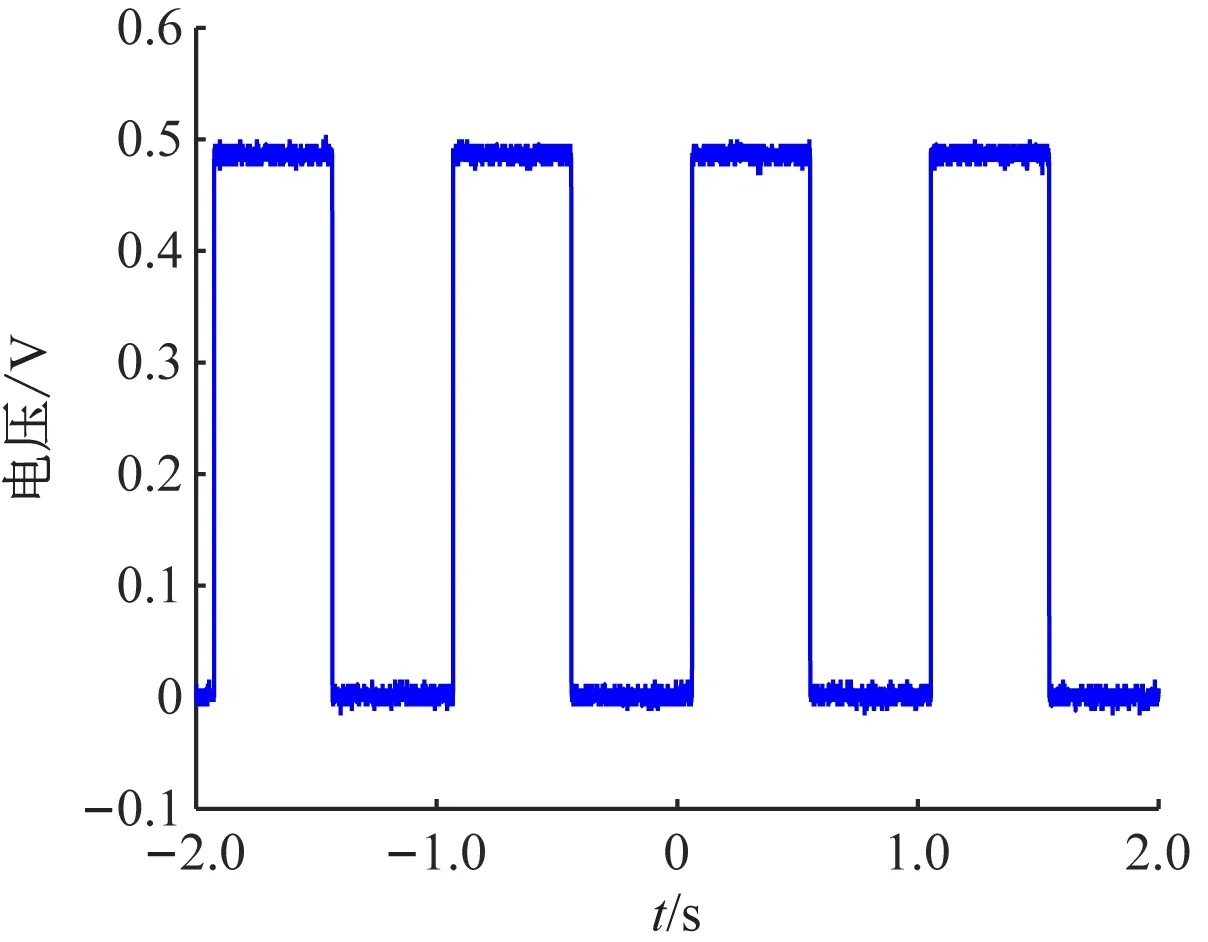
(a) 由原始數據點經繪制后的結果
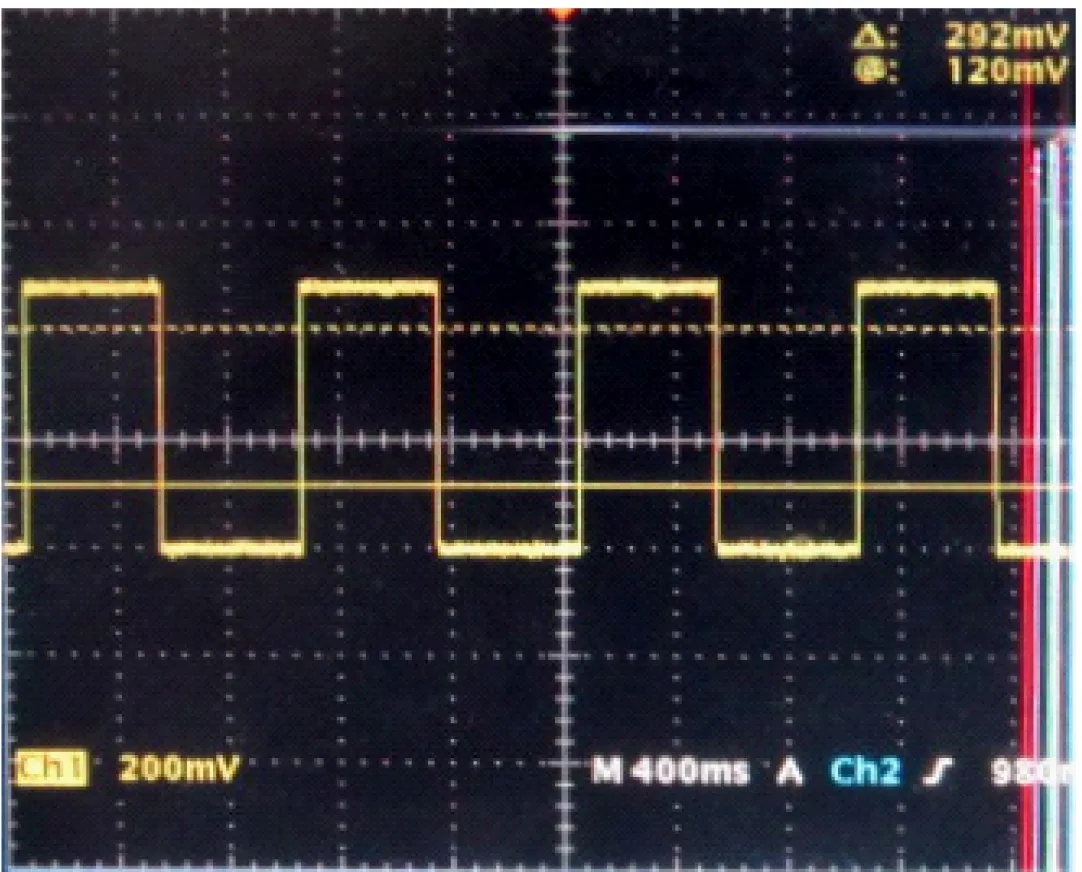
(b) 示波器波形截圖照片

123平均標準差周期/ms992.8993.2992.8992.90.230 9頻率/Hz1.007 31.006 81.007 31.007 12.342 1E-004

表2 脈沖幅值表

表3 低電平的均值及方差表
(2) 激光脈沖上升時間實驗。將上升時間tr定義為脈沖由高電平的10%上升到90%所需要的時間。高電平為0.485 7 V。實際拍攝的脈沖上升沿波形如圖12所示。
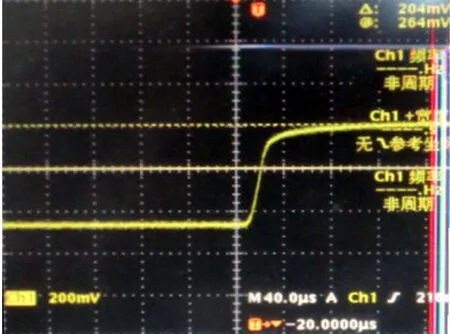
圖12 激光脈沖上升沿波形照片
采用階次為50的多項式擬合方法,對原始數據進行曲線擬合。擬合結果如圖13所示。

圖13 激光脈沖上升沿擬合曲線
上升沿實驗共進行了5組,得到脈沖上升時間約為(44.96±7.563 2)μs。各組數據如表4所示。

表4 激光脈沖上升時間表
(3) 傳輸延遲時間檢測。傳輸延遲時間指由控制電壓給出到激光器開始發光所經歷的時間。由原始數據繪制的波形和示波器波形照片如圖14所示。

(a) 傳輸延時原始數據及擬合曲線(b) 傳輸延時示波器波形照片
圖14 傳輸延時數據波形
將激光脈沖上升到50%最大值的時刻與控制電壓上升到50%最大值的時刻的差值定義為延遲時間, 共采集了3組數據,得到傳輸延遲時間為(5.8±0.1)ms,各組數據如表5所示。

表5 傳輸延遲時間表
4.2 5 Hz激光實驗
(1) 5 Hz激光脈沖波形實驗。5 Hz脈沖波形實驗結果如圖15所示。共采集了4個完整的周期,每個周期的長度為(0.198 6±5.773 5×10-5)s,相應的頻率為(5.034 0±0.001 5)Hz;波形中包含有5個高電平和4個低電平,幅值分別為(0.457 8±0.016 8)V和(1.4±11.6)mV。具體統計信息分比如表6~8所示。
(2) 5 Hz激光脈沖傳輸延遲時間實驗。延遲時間采用與1 Hz實驗時相同的定義。其中,激光脈沖最大值時對應的電壓約為0.457 8 V。由原始數據繪制的波形和示波器波形照片如圖16所示。

(a) 由原始數據點經繪制后的結果(b) 示波器波形截圖照片
圖15 5 Hz頻率時的波形圖

表6 波形周期時間表

表7 脈沖幅值表

表8 低電平的均值及方差表

(a) 傳輸延時原始數據及擬合曲線(b) 傳輸延時示波器波形照片
圖16 傳輸延時數據波形
由傳輸延遲定義得出5 Hz條件下的傳輸延遲時間約為5.9 ms。
5 結 語
研制了用于被動式交會對接敏感器的脈沖編碼激光控制系統。在1 Hz和5 Hz脈沖頻率下,激光脈沖的波形質量、上升時間和傳輸延時均具有較好的特性,基于該系統設計的敏感器在室外強光背景下有效測量測量距離達到了160 m,而且可以很好的濾除太陽光的干擾。