QM-40SA機(jī)床上下料機(jī)器人結(jié)構(gòu)仿真與試驗
2019-04-02 09:31:30霍洪鵬解福祥姜軍生
實驗室研究與探索 2019年2期
霍洪鵬, 解福祥, 姜軍生, 宋 健
(1. 山東科技大學(xué) 機(jī)電學(xué)院, 山東 青島 266590; 2. 濰坊學(xué)院 機(jī)電與車輛工程學(xué)院, 山東 濰坊 261061)
0 引 言
目前常用的機(jī)床有組合機(jī)床、數(shù)控機(jī)床和加工中心等,根據(jù)文獻(xiàn)和企業(yè)調(diào)研,現(xiàn)有的機(jī)床大多數(shù)是手工上下料,能夠?qū)崿F(xiàn)自動上下料的機(jī)床還沒有普及[1~3]。手工上下料需要耗費(fèi)大量的人力、物力和財力。為了解決以上問題,本文針對QM-40SA機(jī)床,利用三維建模軟件Solidworks以及運(yùn)動學(xué)和動力學(xué)仿真軟件(Automatic Dynamic Analysis of Mechanical Systems, ADAMS)與ANSYS,設(shè)計了一種上下料機(jī)器人,針對機(jī)器人的零部件進(jìn)行結(jié)構(gòu)設(shè)計和仿真[4-5]。
1 結(jié)構(gòu)分析與設(shè)計
結(jié)構(gòu)簡化
利用Solidworks根據(jù)機(jī)器人基本組成:支架、腰座、大臂、小臂、末端及組成平行四邊形的拉桿,結(jié)合所要求的尺寸和旋轉(zhuǎn)自由度等,初步建立機(jī)器人的三維模型。
為了分析機(jī)器人各組成構(gòu)件之間的運(yùn)動關(guān)系,圖1(a)為機(jī)器人的簡化機(jī)構(gòu)。圖1(b)中1表示轉(zhuǎn)軸1,其他表示各桿件,設(shè)定桿件13與桿件2為連接軸2;桿件3與桿件2為連接軸3,兩連接軸安裝在同一轉(zhuǎn)座上,其對末端執(zhí)行器位置為并行驅(qū)動,轉(zhuǎn)座又由軸1驅(qū)動,整個機(jī)構(gòu)類似于一個串聯(lián)混合機(jī)構(gòu)。
(a) (b)
1-軸; 2~13-桿件
圖1 加工中心上下料機(jī)器人結(jié)構(gòu)圖
由于此結(jié)構(gòu)為兩組平行四邊形組成,其中主平行四邊形確定末端點位置,輔助平行四邊形使末端執(zhí)行器與水平面保持一個固定的姿態(tài)。
關(guān)節(jié)1即為機(jī)座轉(zhuǎn)動關(guān)節(jié),實現(xiàn)了360°的扭轉(zhuǎn);桿件2、3、4、5共同組成了平行四邊形,且由于桿件3固定在機(jī)座上,故其在各關(guān)節(jié)轉(zhuǎn)動時會一直保持著水平的狀態(tài),由于平行四邊形結(jié)構(gòu)的特征使得桿件6也一直保持著水平的姿態(tài);桿件6和8為同一構(gòu)件上,所以桿件6與8之間的夾角不變,桿件8與水平面的夾角也不會改變;同樣的桿件11與水平面的夾角不會改變,桿件11與12同屬在同一構(gòu)件,所以末端點12所在面就不會改變,一直保持著水平狀態(tài)。對于腰部結(jié)構(gòu)如圖2所示。
圖2中1為大臂,2為連接桿件3(見圖1)和桿件2的關(guān)節(jié)連接軸,3為小臂的連接軸。電動機(jī)通過連接減速器再連接在關(guān)節(jié)軸的兩邊,左邊大臂與軸鍵連使左邊電動機(jī)可以帶動大臂轉(zhuǎn)動,右邊小臂的連接與軸鍵連,從而右邊的電動機(jī)可以通過帶動小臂連接轉(zhuǎn)動來帶動小臂實現(xiàn)俯仰動作。
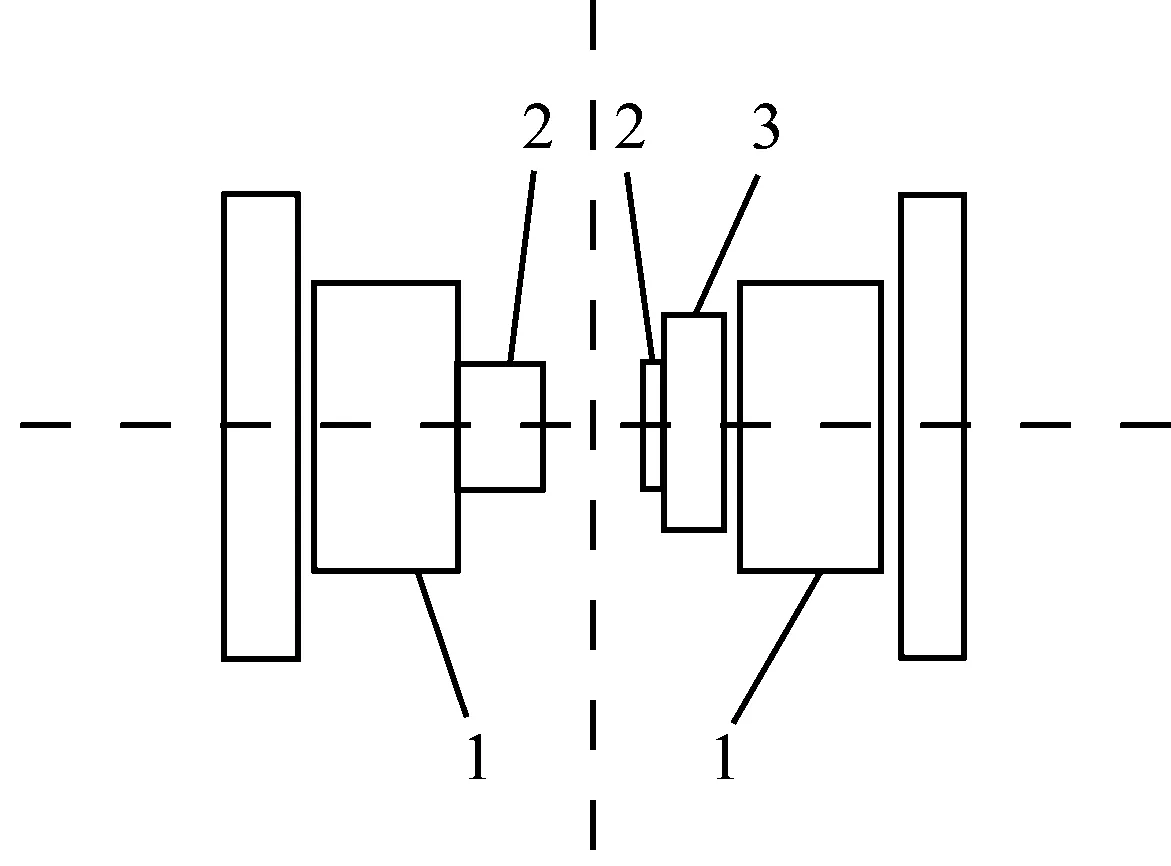
1-大臂; 2-連接軸; 3-小臂連接軸
圖2 腰座與大、小臂連接結(jié)構(gòu)
由于結(jié)構(gòu)的特殊性,故影響機(jī)器人末端點位置的因素由桿件2的轉(zhuǎn)動,即為小臂的俯仰角度。也是由此兩個因素來實現(xiàn)工作空間內(nèi)的動作。簡化結(jié)構(gòu)如圖3所示。
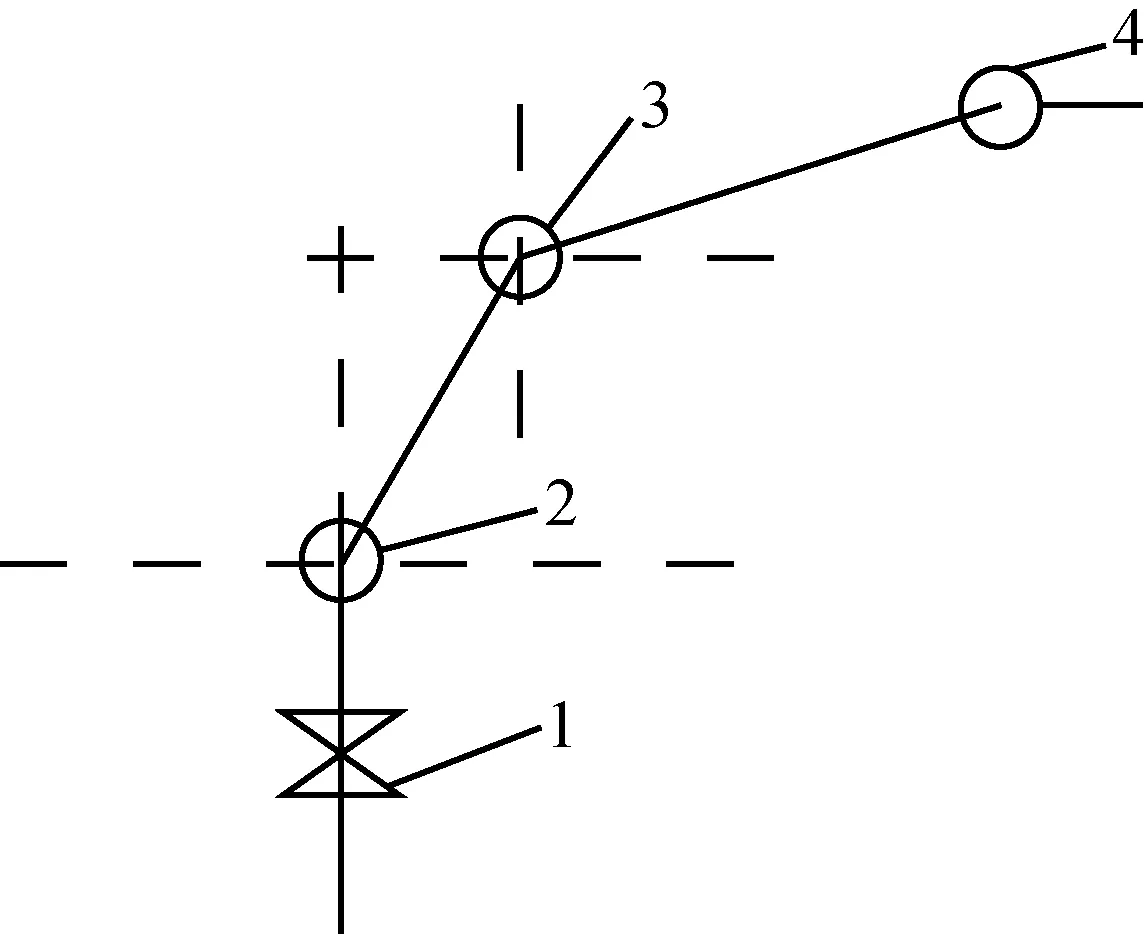
1-腰部; 2-大臂; 3-小臂; 4-末端執(zhí)行器
圖3 機(jī)器人結(jié)構(gòu)簡化圖
2 數(shù)據(jù)計算
2.1 根據(jù)D-H法建立坐標(biāo)系
為了表示機(jī)器人末端執(zhí)行器的位姿,通常在機(jī)器人的末端建立一個相對坐標(biāo)系。因為空間中的一個點在不同坐標(biāo)系中位置表示是不同的,所以需要利用不同坐標(biāo)系之間相互轉(zhuǎn)換關(guān)系。定義桿件2與水平面的夾角為β1,以及桿件9與水平面之間的夾角為β2,連桿參數(shù)與關(guān)節(jié)變量見表1。坐標(biāo)系如圖4所示。
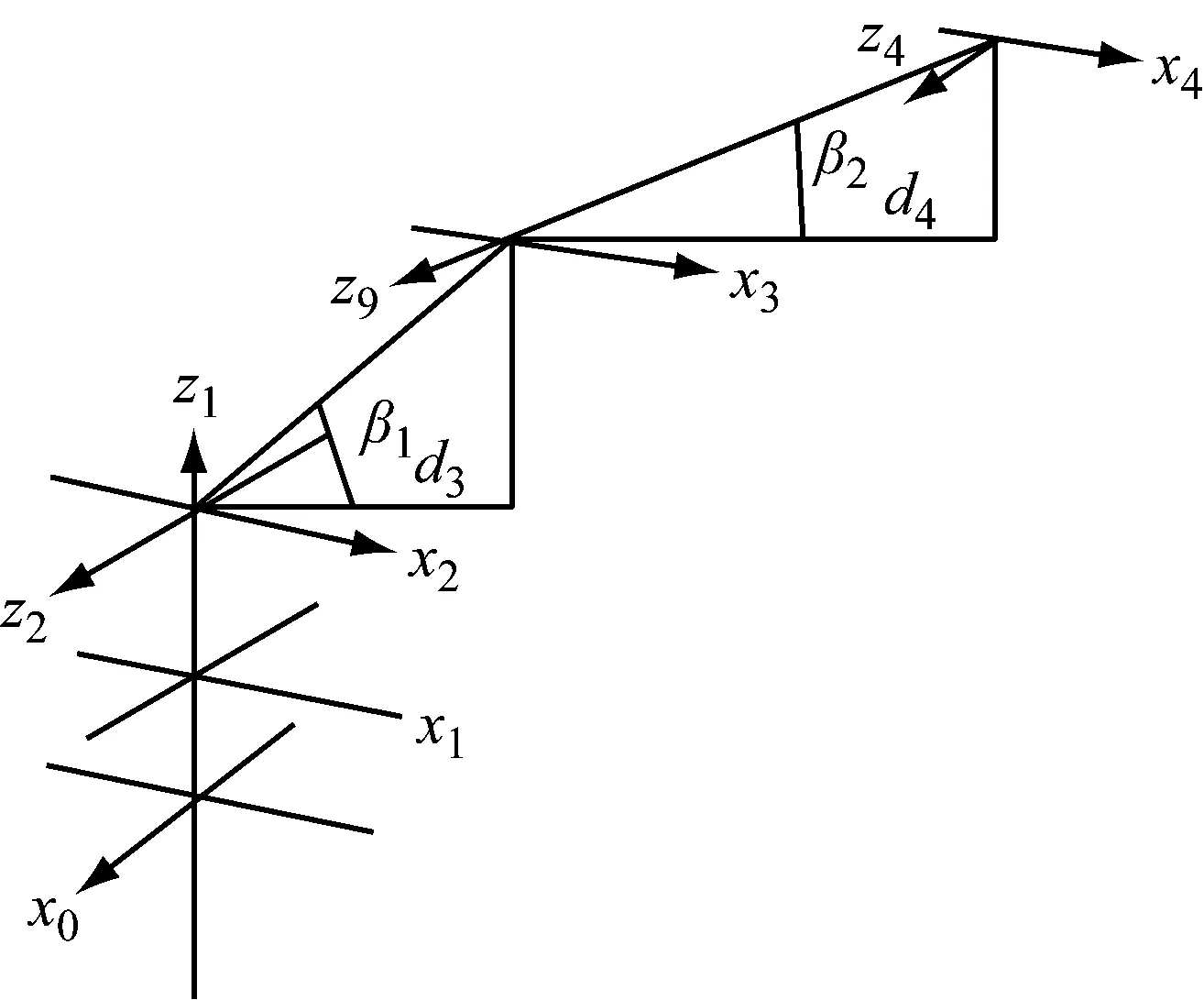
圖4 坐標(biāo)系簡化圖
圖中,在每一個關(guān)節(jié)處建立坐標(biāo)系,zi軸在xi-1至xi方向的平移距離di,xi在zi-1至zi方向的平移距離為ai,zi旋轉(zhuǎn)θi角度使得xi-1旋轉(zhuǎn)至與xi平行,xi旋轉(zhuǎn)αi角度使得zi-1旋轉(zhuǎn)至與zi平行。
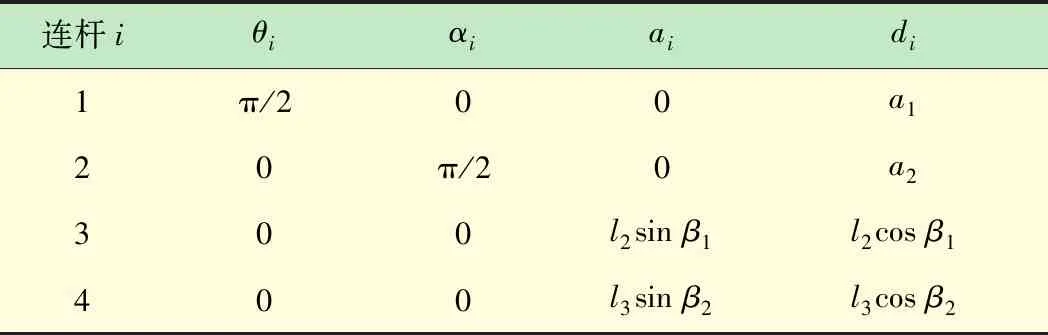
表1 連桿參數(shù)與關(guān)節(jié)變量
2.2 運(yùn)動學(xué)正解
如果已知關(guān)節(jié)變量,求解上下料機(jī)器人末端執(zhí)行器相對于參考坐標(biāo)系位姿的過程為運(yùn)動學(xué)的正解。通過對機(jī)構(gòu)的運(yùn)動學(xué)正解[6-8]分析,可以得出機(jī)器人末端的位置,從而知道機(jī)器人的工作空間。各個關(guān)節(jié)的D-H坐標(biāo)系建立后,通過齊次坐標(biāo)變換矩陣,求出桿件i-1到i桿的轉(zhuǎn)換。
根據(jù)4×4的齊次變換矩陣公式:
Ti=rot(xi,αi-1)trans(xi,a1)trans(zi,di)rot(zi,θi)
依次得桿1轉(zhuǎn)換到參考坐標(biāo)系轉(zhuǎn)換矩陣:
0T=trans(0,0,a1)rot(z,θ1)=
桿件2轉(zhuǎn)換到桿件1坐標(biāo)系轉(zhuǎn)換矩陣:
1T=trans(0,0,a2)rot(x,θ2)=
桿件3轉(zhuǎn)換到桿件2坐標(biāo)系轉(zhuǎn)換矩陣:
桿件4轉(zhuǎn)換到桿件3坐標(biāo)系變換矩陣:
已知齊次變換矩陣的表達(dá)式為:
0T=0T1T2T3T=
由此可知,當(dāng)桿件2與桿件3一定,安裝時βi一定,然后轉(zhuǎn)動后改變的Δβ一定時,那么末端的坐標(biāo)是一定的。而其中的Δβ大小與電動機(jī)轉(zhuǎn)角有關(guān)系。
3 仿真分析
3.1 前處理
現(xiàn)利用運(yùn)動仿真軟件ADAMS對機(jī)器人進(jìn)行運(yùn)動軌跡仿真[9-12],進(jìn)一步確定其工作空間與軌跡。將模型Solidworks中另存為x-t格式,以便其在ADAMS中打開。
根據(jù)機(jī)器人工作時的動作特點和工作對象,在多種驅(qū)動方式中選擇電動機(jī)做驅(qū)動方式。電動機(jī)驅(qū)動效率高、運(yùn)動速度快、位姿精確度高。現(xiàn)對底座、腰座、大臂、小臂,以及各個拉桿和關(guān)節(jié)進(jìn)行運(yùn)動副的設(shè)定,然后在安裝電動機(jī)的地方設(shè)定驅(qū)動旋轉(zhuǎn)力。
為了使得仿真成功,需要在仿真前進(jìn)行各個運(yùn)動副的檢測,在ADAMS/view中的tools工具中選擇model verify 選項得到其中model verified successfully表明模型定義成功,現(xiàn)在進(jìn)行仿真的下一步。
現(xiàn)僅對左右電動機(jī)施加轉(zhuǎn)矩,使得假定電動機(jī)的旋轉(zhuǎn)帶動拉桿驅(qū)動大小臂運(yùn)動,從而完成機(jī)器人的工作,由仿真的末端點的軌跡線可以看出,由左右電動機(jī)旋轉(zhuǎn)的配合,末端可以完成上下一定角度的弧線運(yùn)動。其中仿真時對ADAMS中Revolute joint添加motion時,step設(shè)置默認(rèn)值為30.0d*time,此時type選displacement,則參數(shù)的實際意義為角速度為30°/s;這樣就可以通過電動機(jī)與減速器的搭配來適應(yīng)其工作時速度等[13-15]。
3.2 路徑規(guī)劃
首先,已知機(jī)器人的自由度,其主要運(yùn)動可分為腰座的旋轉(zhuǎn),大、小的俯仰。分別用電動機(jī)控制,為實現(xiàn)對于放置在不同地方的物料,進(jìn)行位置的準(zhǔn)確抓取、放置,對各個部位的軌跡配合記性設(shè)計。各個部位的運(yùn)動順序的不同可以實現(xiàn)軌跡的不同,如圖5所示。
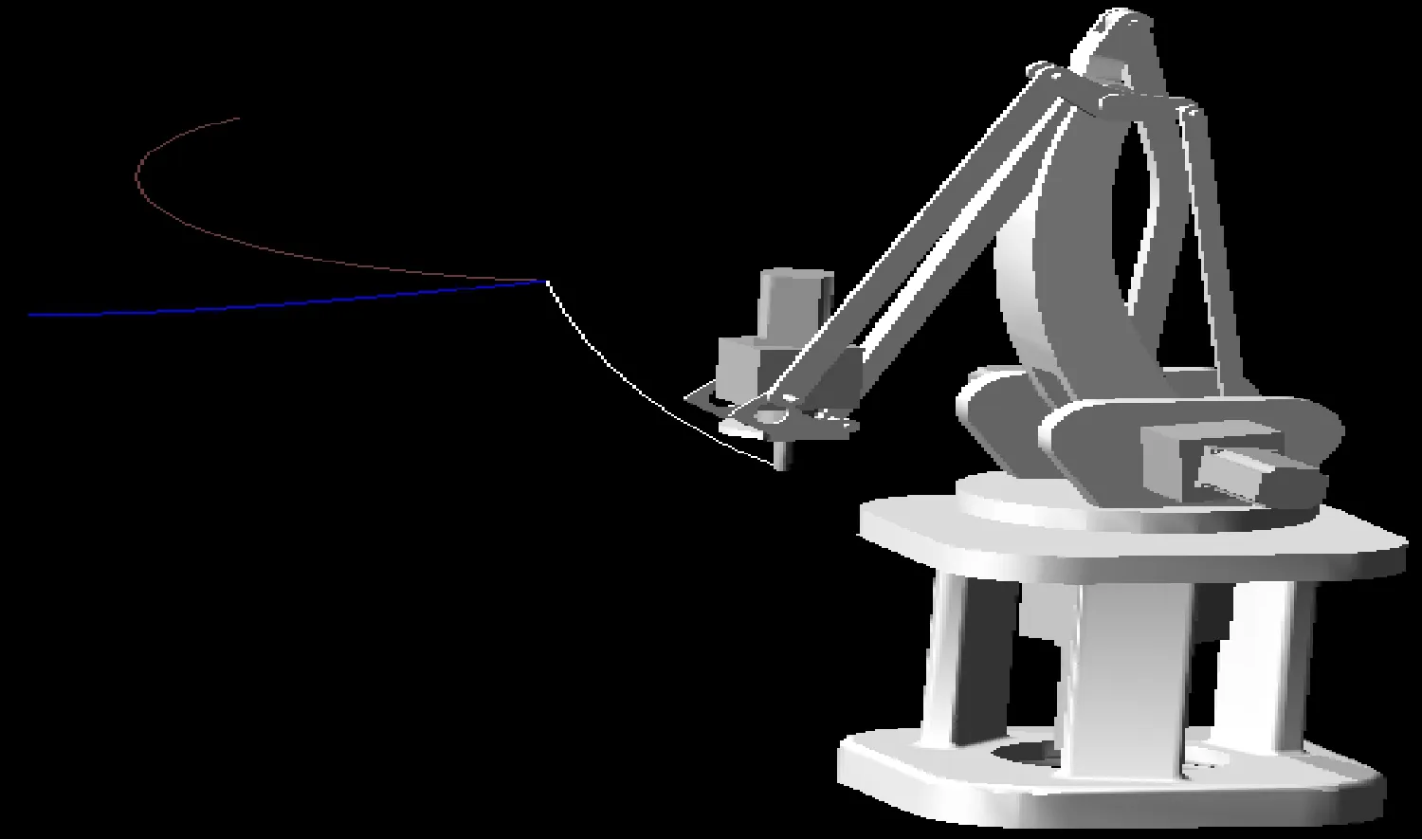
圖5 仿真軌跡圖
其中在末端抓取物料,經(jīng)過沿弧線軌跡提升(小臂上仰),下面如若工作需要可以沿藍(lán)色軌跡將物料放在機(jī)器的正前方(大臂的下俯);倘若需要沿著棕色軌跡放著物料,則為腰座和大臂的下俯共同作用實現(xiàn)。由此可知,電動機(jī)的先后運(yùn)作和合作可以改變末端軌跡路線。通過控制不同電動機(jī)的旋轉(zhuǎn)配合,轉(zhuǎn)動速度、方向等因素,可以形成在某一區(qū)域的上下料工作動作軌跡。
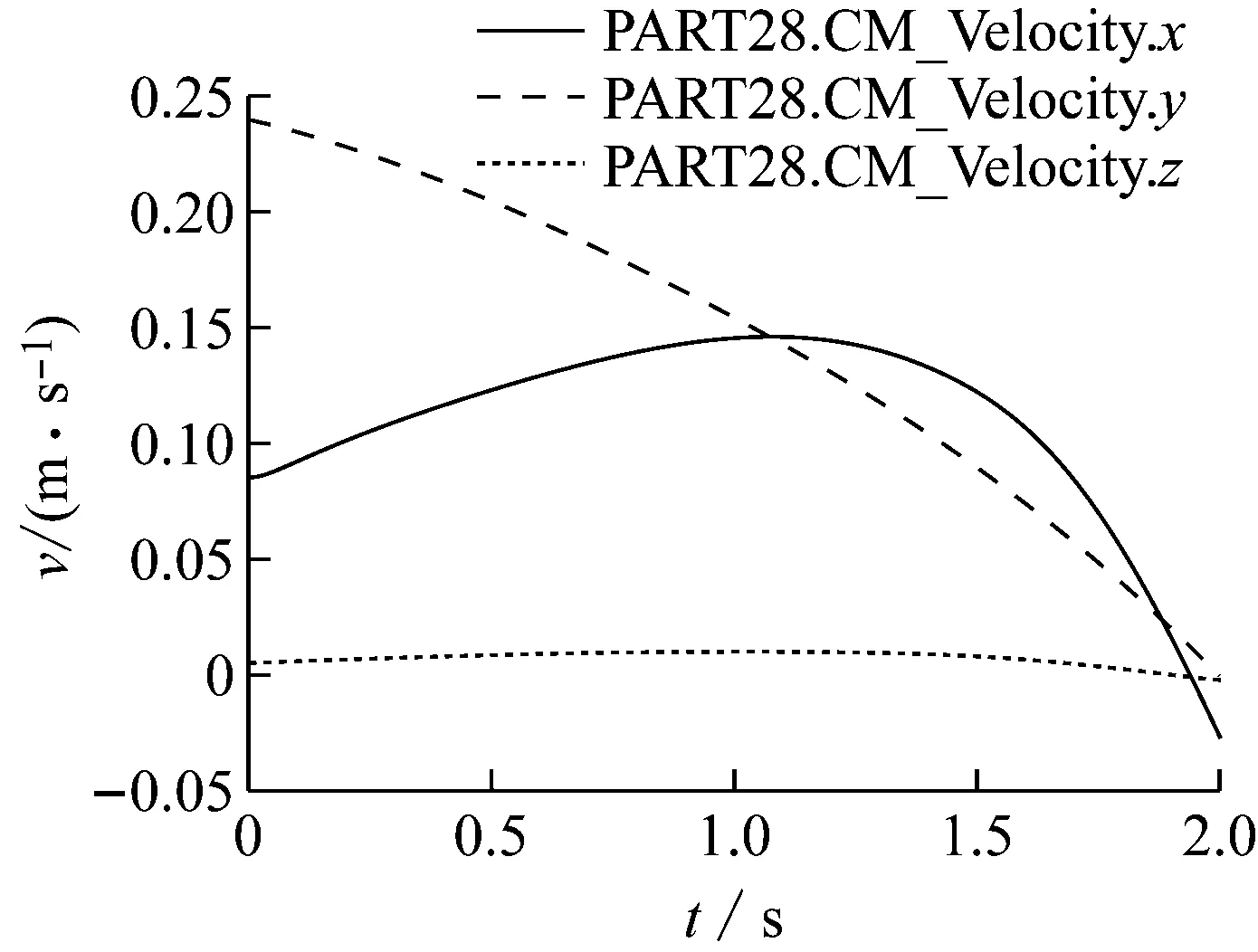
3.3 速度分析
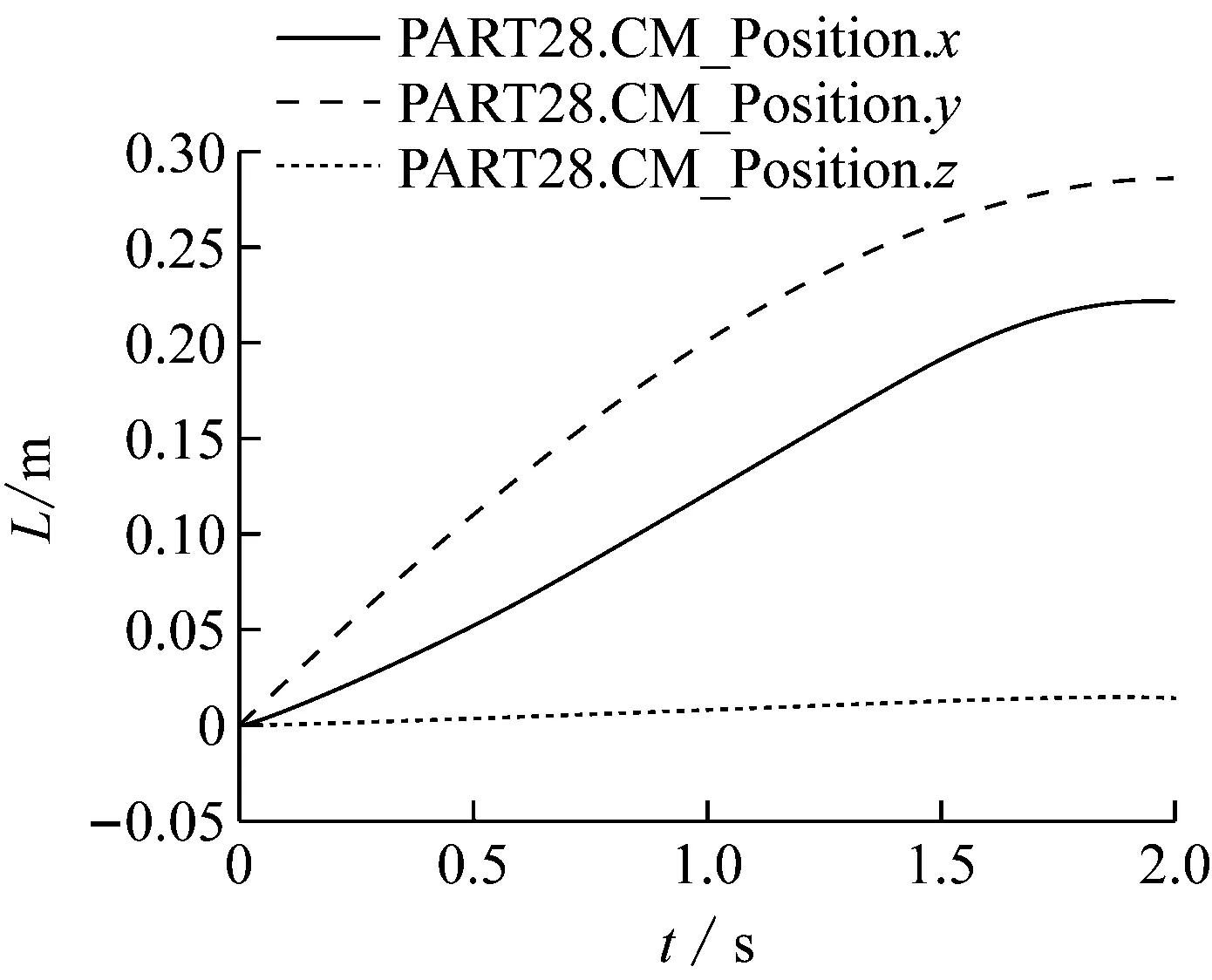
如圖6所示,末端執(zhí)行器連接點從小臂上仰階段(白色軌跡),圖6(a)可以看出藍(lán)色線y軸速度趨于0,得出機(jī)器人在做上仰這一動作到位時的速度恰好為零停止。此時末端所抓取的物料速度也為零,避免了物料上下大幅度的顫動,也避免了對位姿準(zhǔn)確精度等關(guān)鍵問題的出現(xiàn)。
(a)
(b)
圖6 末端3軸速度和位移曲線
且在圖6(b)中可以看出,上仰高度值近0.3 m,z軸坐標(biāo)線接近水平狀態(tài),數(shù)值幾乎未發(fā)生改變,說明末端在做此動作時末端執(zhí)行器基本保持在x-y面內(nèi)移動。在z軸上未發(fā)生大幅度的偏移,同樣保證了末端位置的準(zhǔn)確性。
圖7為末端旋轉(zhuǎn)與前伸時的位移,可以得出在z軸方向可以旋轉(zhuǎn)或前伸放置1 m外的物料,且y軸位移未變,表明在z-x面內(nèi)旋轉(zhuǎn)或前伸。y軸并未發(fā)生較大數(shù)值的偏移,滿足平穩(wěn)的前伸放置物料要求。

圖7 末端3軸位移曲線(前伸或旋轉(zhuǎn))
通過以上對仿真結(jié)果的分析,仿真結(jié)果與計算結(jié)果相符合,由此也充分可以確定計算運(yùn)動的動力學(xué)方程是正確的。可以進(jìn)行下一步的承載驗證。
3.4 關(guān)鍵部件動力學(xué)分析
根據(jù)對平常上下料的質(zhì)量分析,針對數(shù)控銑床、磨床等加工物料一般質(zhì)量在1~10 kg,針對這個質(zhì)量區(qū)間分別進(jìn)行分析。鑒于機(jī)器人總體的結(jié)構(gòu)分析,上下料機(jī)器人所有零部件中,小臂處受力面積小,受力大,工作時最易發(fā)生形變損壞,因此對小臂進(jìn)行動力學(xué)仿真成為機(jī)器人是否能完成工作及設(shè)計可行性的依據(jù)。
將小臂的三維立體圖另存為x-t格式文件,啟動ANSYS WORKBENCH后創(chuàng)建static structural 分析,將小臂的x-t文件導(dǎo)入,而后劃分網(wǎng)格、施加約束和力并求解[16-17]。首先,設(shè)定物料5、10 kg,不同質(zhì)量的物料總體變形和應(yīng)力云圖如圖8所示。
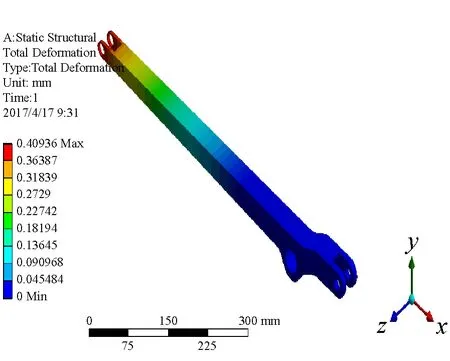
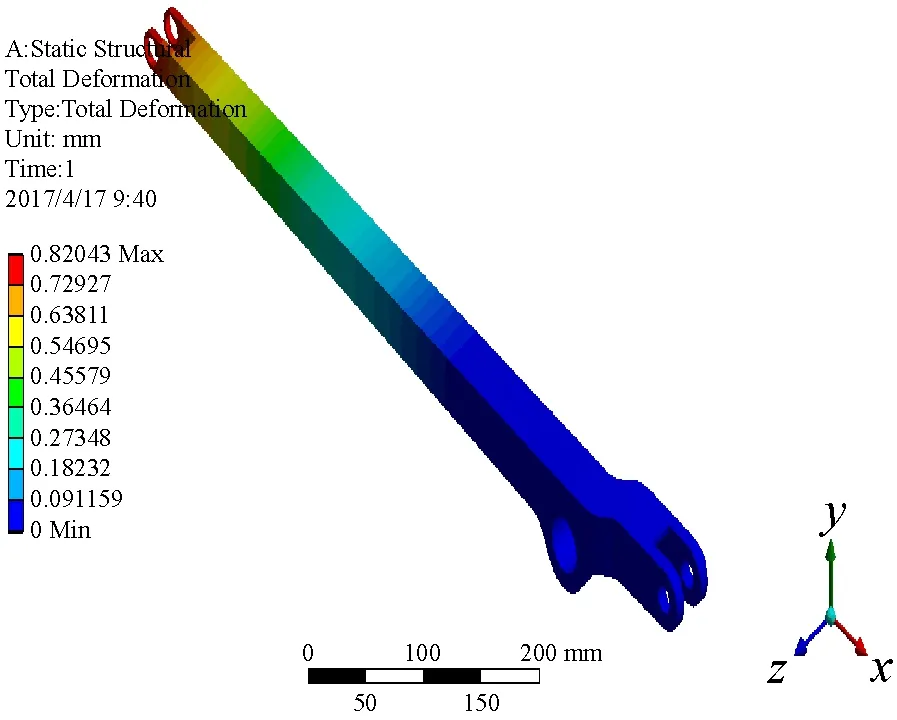
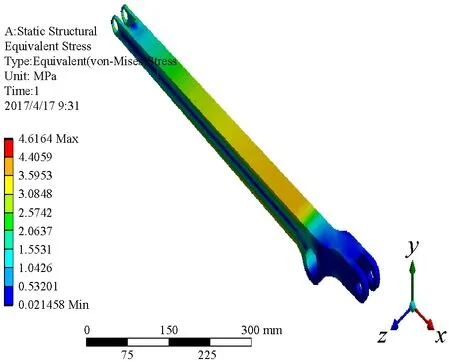
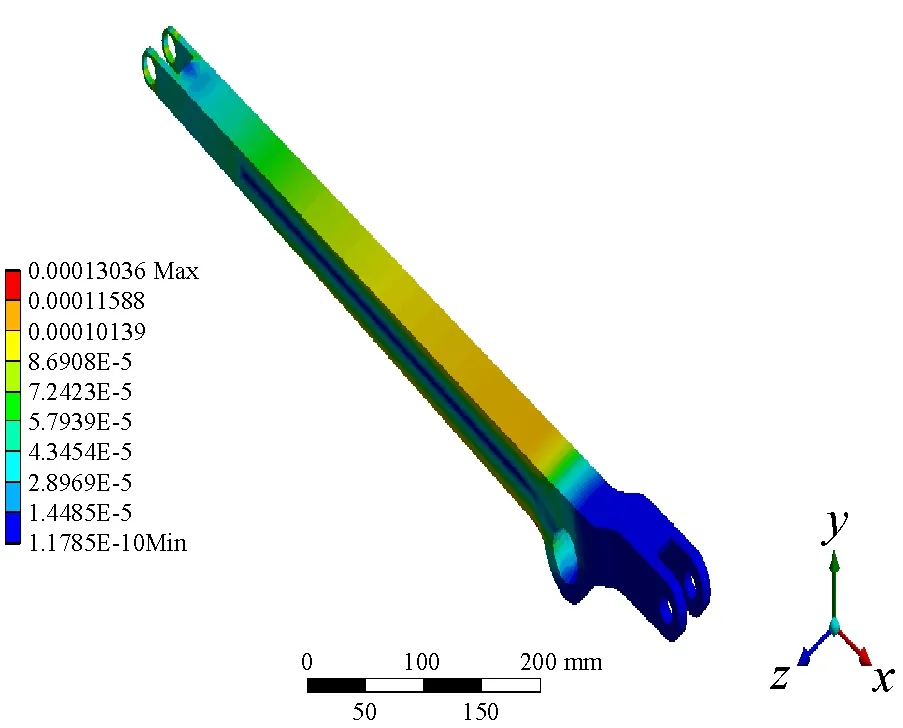
圖8 總體變形和應(yīng)力云圖(5 kg、10 kg)
由彩色云圖顯示的小臂受力時應(yīng)力應(yīng)變分布情況,可以形象清楚的看出,小臂在工作時承受的最大應(yīng)力在與大臂連接和末端連接之間部分,所以在這個區(qū)域容易發(fā)生疲勞失效,這與實際相符合,而且也能從中得出小臂的受力不影響工作的完成,表明設(shè)計的可行性。
3.5 試驗驗證
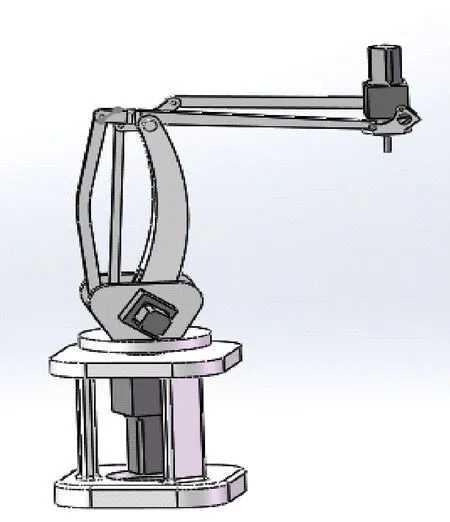
機(jī)床上下料機(jī)器人樣機(jī)如圖9所示。根據(jù)末端執(zhí)行器仿真軌跡線中均勻地選取4個點,現(xiàn)通過試驗來驗證4個點的實際坐標(biāo)值,來驗證工作的可行性。以起始點作為坐標(biāo)原點,依次選取坐標(biāo)點,分別進(jìn)行5次測量,見表2。

圖9 機(jī)床上下料機(jī)器人樣機(jī)
根據(jù)表2,可以看出試驗中末端執(zhí)行器選定的4個點上x、y、z3坐標(biāo)偏差都在2 mm內(nèi),說明機(jī)器可以完成。
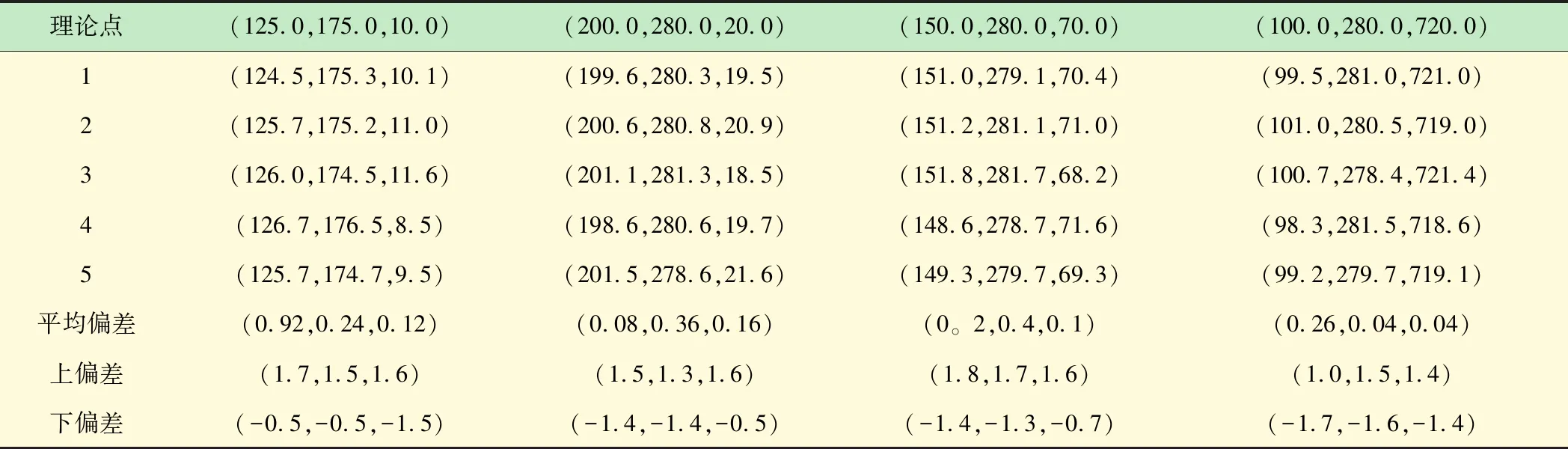
表2 重復(fù)定位 mm
4 結(jié) 語
(1) 本文對上下料機(jī)器人依次做了結(jié)構(gòu)分析,對簡化的結(jié)構(gòu)各個關(guān)節(jié)建立D-H坐標(biāo)系,然后對機(jī)器人末端進(jìn)行運(yùn)動學(xué)正解,通過Solidworks對其進(jìn)行三維建模,并進(jìn)行了樣機(jī)試制。
(2) 運(yùn)用運(yùn)動學(xué)仿真軟件ADAMS對各個關(guān)節(jié)添加運(yùn)動副進(jìn)行運(yùn)動仿真,分析其運(yùn)動軌跡,得到末端的運(yùn)動速度曲線,作為選擇電動機(jī)及減速器的依據(jù)。
(3) 運(yùn)用ANSYS仿真軟件對上下料機(jī)器人的小臂進(jìn)行動力仿真分析,通過小臂工作時受力最大時的應(yīng)力云圖和總體變形可形象看出,對于1~10 kg的物料,機(jī)器人的小臂能夠順利實現(xiàn)上下料。試驗結(jié)果表明,末端執(zhí)行器在x、y、z3坐標(biāo)偏差都在2 mm內(nèi)。