基于LED車燈的車聯網高速通信系統
2019-04-10 06:05:42蔣子豪劉淵帆梁尚雨王福民李廣士
照明工程學報 2019年1期
蔣子豪,劉淵帆,梁尚雨,王福民,李廣士,喬 梁,遲 楠
(復旦大學通信科學與工程系電磁波信息科學教育部重點實驗室,上海 200433)
引言
可見光通信(visible light communication, VLC)以發光二極管(lighting emitting diode,LED)作為發射光源,且能夠以較低的價格實現照明和通信,適用于各種接入場景,其優點是綠色、節能且不受電磁干擾[1]。基于LED的可見光通信能同步地提供照明和通信,因而其發展相當有前途。VLC作為一種新的照明和通信模式,促進了下一代照明和接入網絡的發展和技術進步,同時也成為國際研究新的熱點[2,3]。VLC的出現和發展不僅拓寬了無線接入網絡的頻譜資源,而且為社會提供了一種新的移動接入方式[4-6]。
車聯網是交通領域中物聯網的具體應用,是智能交通的基礎和前提。盡管車聯網仍處于起步階段而且汽車網絡還不夠成熟,但中國正不斷加強對汽車網絡的研究,這也導致人們從無到有地認知并了解車聯網。
本文提出一種基于可見光通信而應用于車聯網的通信方式,利用車燈LED作為發射端和高性能的PIN管作為接收端。該可見光通信系統基于離散多音頻(Discrete Multi-Tone,DMT)調制方式。通過改變傳輸距離、驅動電流、信號幅值等參數,我們研究了該系統的最高傳輸速率與誤碼率性能。
1 車聯網背景
車聯網的概念是從物聯網中擴展出來的,也可以說是物聯網在交通領域的一種應用。從廣義上講,車聯網并非傳統意義上信息網絡平臺對所有車輛的動態靜態信息與屬性等的監控與提取,而是更為廣泛地以車為中心的,搭建起車對車、車對地面、車對人和車對云端一體化的進行無線通訊與信息交換的大型網絡系統[7,8]。

圖1 車聯網系統框圖Fig.1 Car networking system block diagram
車聯網技術最終的發展應該依托通信平臺,而且這種通信方式應該是多模式的通信方式,傳統的車與車之間的通信技術主要包括微波、紅外技術、專用短程通信等[9],而本文依托時下快速發展的可見光通信,提出了一種新的前車與后車之間的車燈通信交互方式。
2 DMT調制原理
DMT是正交頻分復用(Orthogonal Frequency Division Multiplexing,OFDM)技術中的一種。DMT是通過對不同的子信道發送不同長度的比特來得到最大信息流量的多載波調制的一種特殊形式, DMT調制提供了高頻譜效率,并且對跨符號干擾(inter-symbol-interference, ISI)和頻率選擇性衰落的信道具有很強的魯棒性[10]。
DMT系統模型如圖2所示,在系統進行工作時,對輸入的二進制數據先進行QAM映射然后再進行串轉并。為了進行信道估計,在符號中加入導頻符號,做快速傅里葉逆變換(IFFT)使各個信號調制到相互正交的子載波上,最后對信號做并串轉換后將得到的串行數據經車燈LED光源發送出去。經過自由光場信道后, VLC系統接收端的光電二極管(PIN)將光信號轉化為電信號。在對DMT進行解調時,信號需要進行同步,在去CP做FFT變換之前,先做串并轉換。為了對各個子載波分配合適的調制方式,系統需要利用導頻做信道估計。估計的結果進行并轉串,最后通過QAM解映射將數據進行輸出[11]。
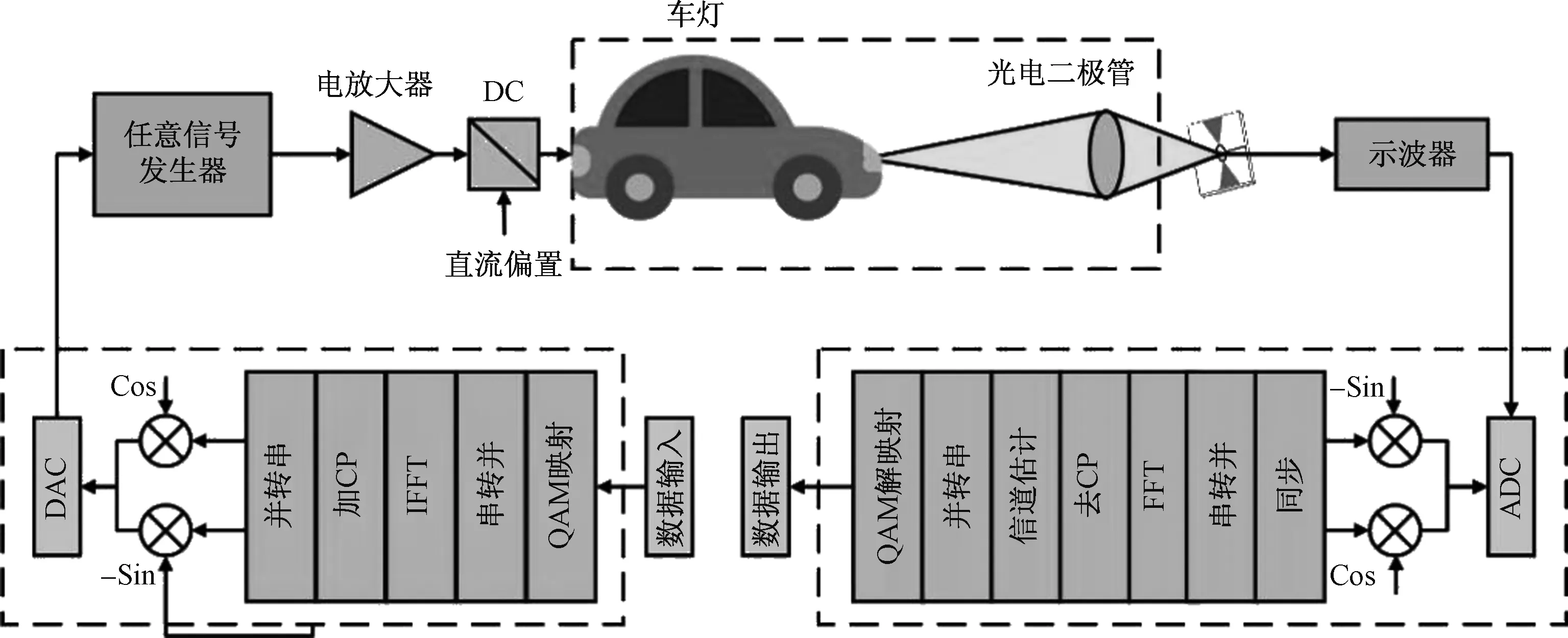
圖2 可見光通信DMT調制系統模型Fig.2 DMT modulation of VLC system diagram
3 實驗設置
VLC系統實驗裝置圖如圖3所示。在這個VLC系統中,我們所使用的任意波形發生器(AWG)型號是Tektronix AWG520。輸出的DMT信號經過電放大器(EA)與直流偏置器(Bias Tee)交直流耦合后,加載到車燈LED。發送的信號經自由空間,通過透鏡與光柵,由PIN管(濱松S6968)接收光信號并轉化為電信號導入到示波器中,數據通過計算機進行離線處理,最后比較輸入輸出的誤碼率(bit error rate,BER)。發射信號為32 QAM DMT 8倍上采樣,接收端接收帶寬為50 MHz,示波器的采樣速率為500 MHz。
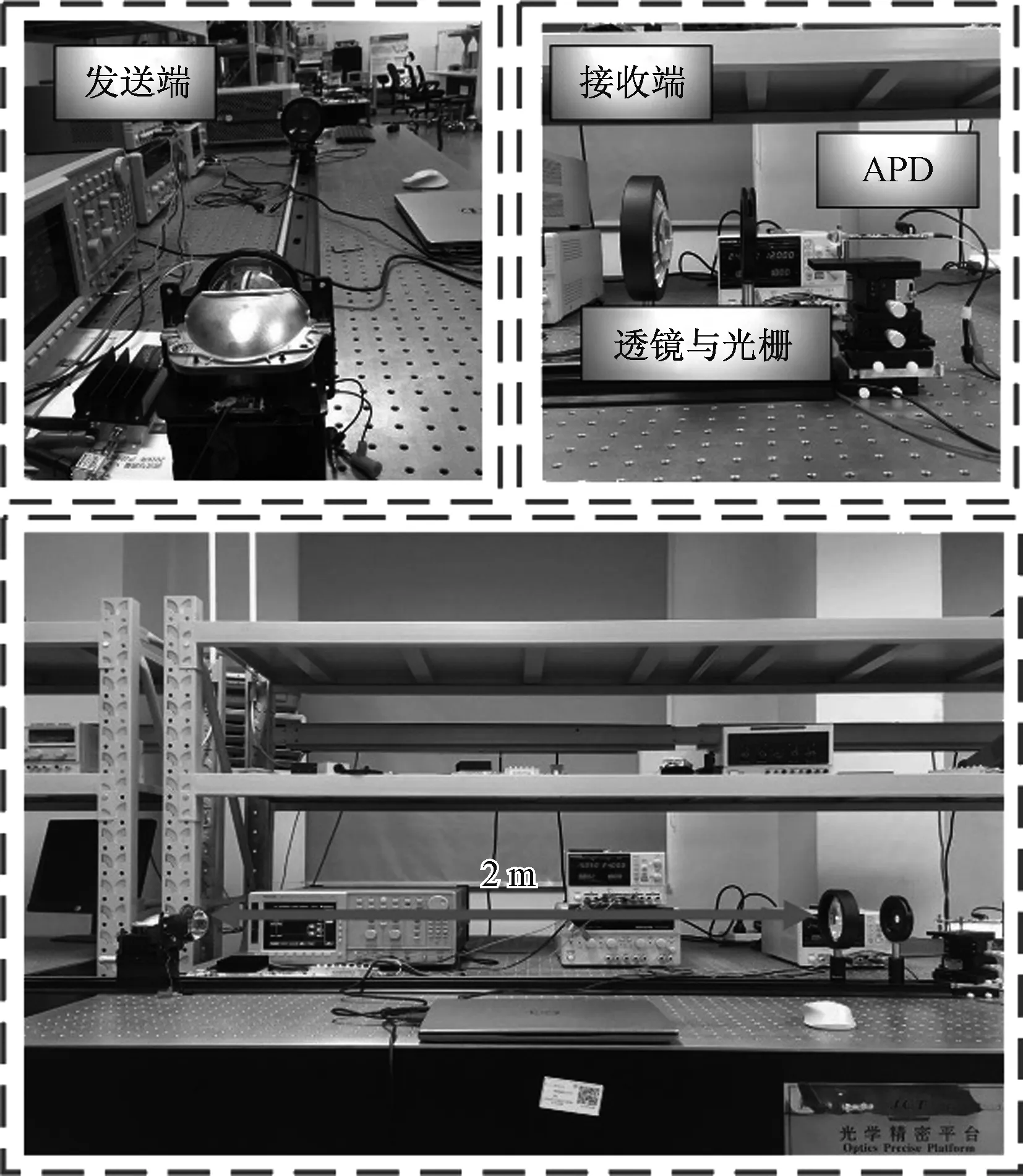
圖3 VLC系統實驗裝置圖Fig.3 The experimental setup of VLC system
4 實驗結果
圖4(a)表示該可見光通信系統發送信號的頻譜,因為可見光系統中LED的響應曲線是呈指數衰減,所以接收信號頻譜如圖4(b)所示。

圖4 發送信號、接收信號頻譜圖Fig.4 Spectrogram of the signal sent and received

圖5 速率對信號性能的影響圖Fig.5 Effect of data rate on the signal performance
圖5所示為速率對信號性能的影響圖,在做速率對信號性能影響分析的時候,設定驅動電流為380 mA,Vpp為0.5 V。我們可以從圖5中看出誤碼率隨著傳輸速率的增大而增大。系統傳輸最大的比特率為181.25 Mbps,即AWG的最高采樣率為290 MHz時,誤碼率在3.8×10-3以下。
圖6所示為距離對信號性能的影響圖,在做距離對信號性能影響分析的時候,設定驅動電流為420 mA,AWG的采樣率為290 MHz,即信道傳輸比特率為181.25 Mbps。我們將車燈LED與PIN之間的距離設定在1.2~2 m之間,測試間隔為0.2 m。我們同時采集了信號幅值Vpp為0.6 V, 0.7 V與0.8 V的三組數據進行比較。我們可以從圖中發現,當VLC系統距離在1.2~2 m之間時,誤碼率全部都在誤碼門限3.8×10-3以下,由于距離增加后接收機接收到的光功率降低,系統的信噪比(SNR)降低,BER增加,這也符合預期。
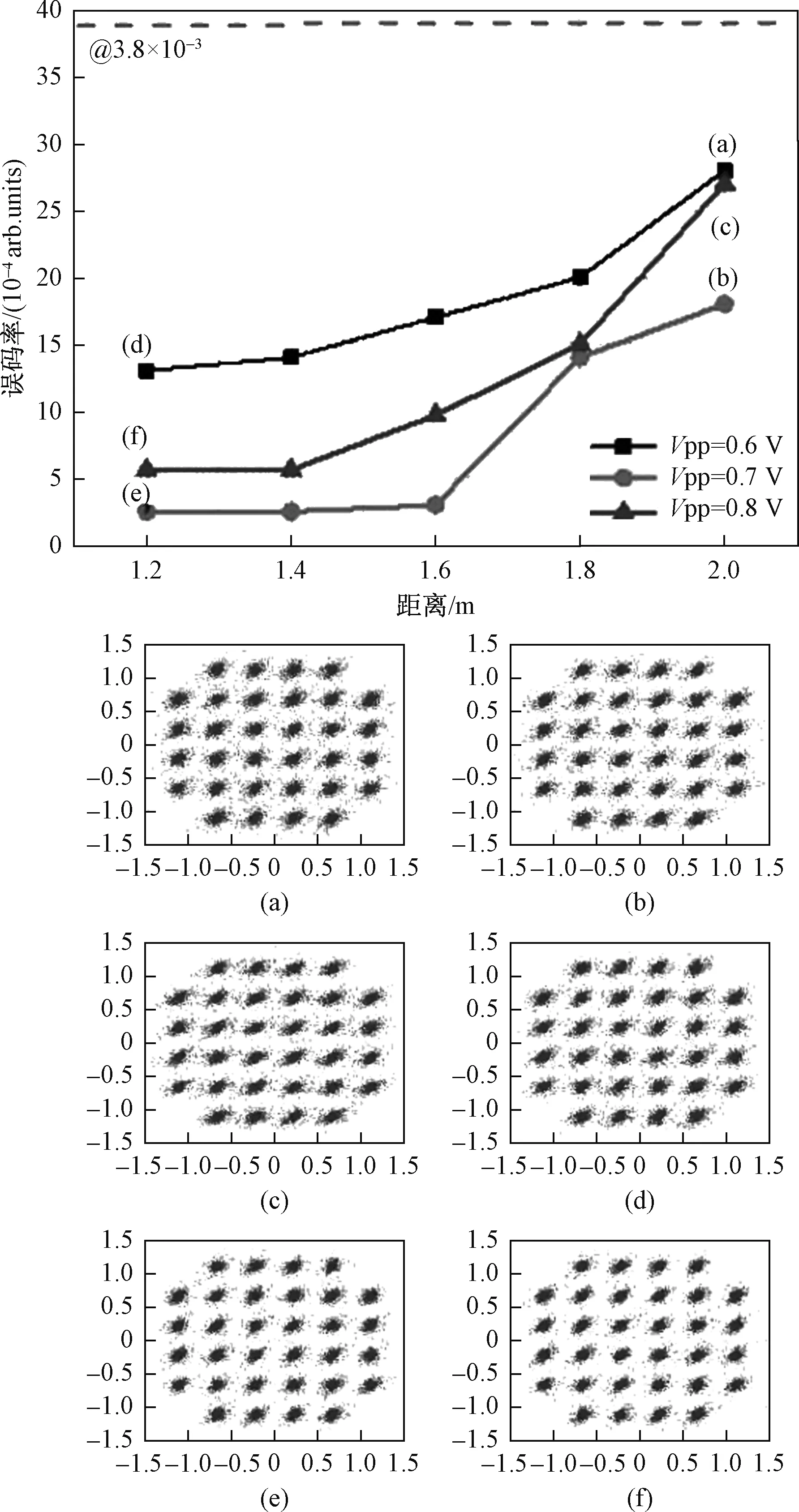
圖6 距離對信號性能的影響圖Fig.6 BER v.s distance
最后實驗測試了車燈LED驅動電流與信號幅值的影響,為的是能夠找到該車燈通信的最佳工作點,驅動電流的變化范圍為300~460 mA,間隔為40 mA,信號幅值變化范圍在0.5~0.9 V之間,間隔為0.1 V。圖7是信號幅值與驅動電流對信號性能的影響圖,縱向比較系統誤碼率,可以看出在信號幅值一定的時候最佳工作電流為340 mA,橫向比較,在工作電流一定時,最佳工作的信號幅值為0.7 V。所以當工作電流為340 mA,信號幅值為0.7 V,誤碼率只有5.25×10-4,因此我們也可以根據圖8找到最佳工作點。

圖7 信號幅值與驅動電流對信號性能的影響圖Fig.7 BER v.s signal amplitude and current
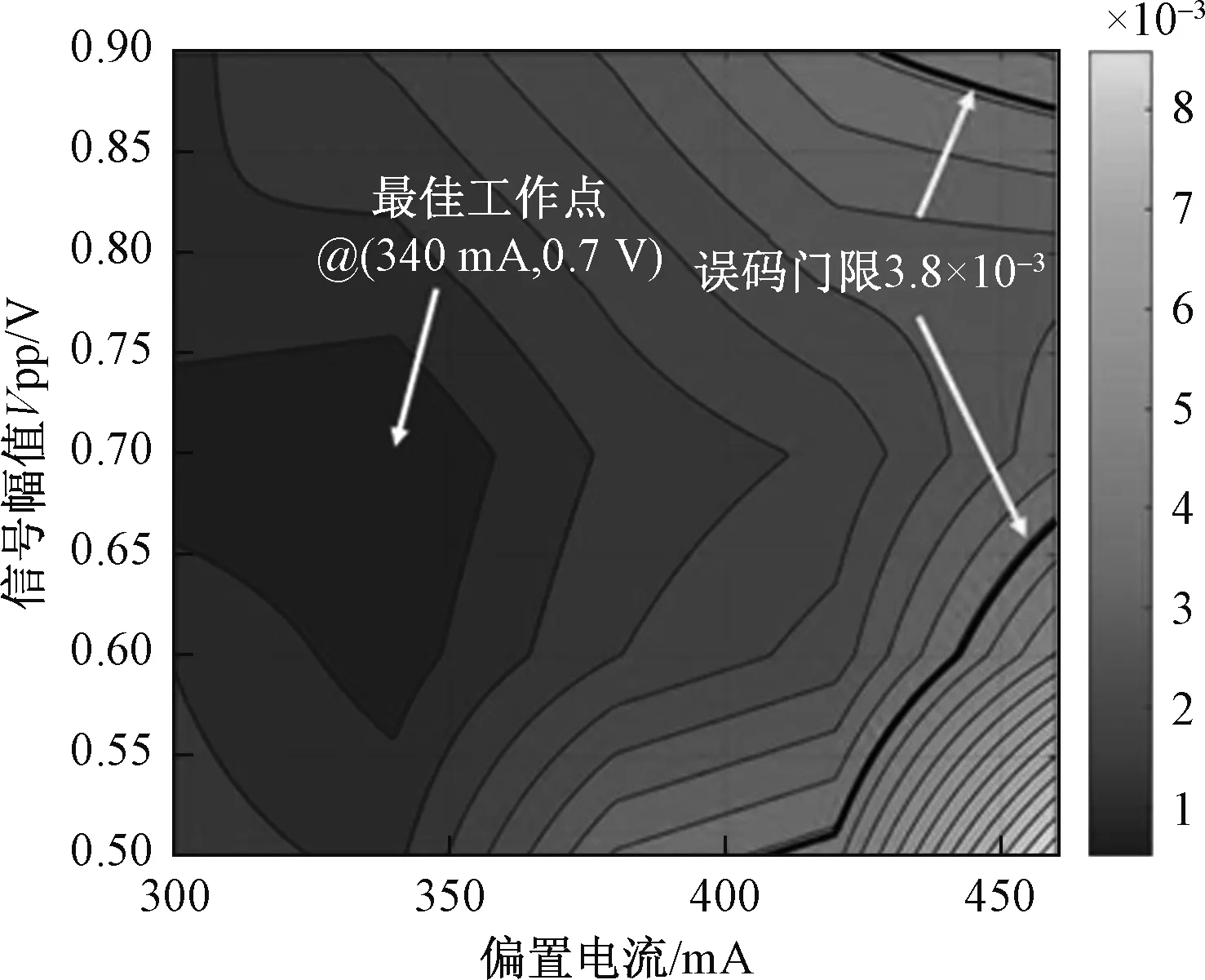
圖8 工作點等高線圖Fig.8 Contour map of operating point
5 結束語
我們提出了一種用在車聯網中以解決車與車之間交互的LED車燈可見光通信系統。實驗中使用車燈LED模組,高靈敏度的PIN接收器,采用DMT調制方式,實現將系統的傳輸速率達到181.25 Mbps。系統的誤碼性能在經過2 m的自由空間傳輸后仍然低于誤碼門限3.8×10-3。同時,通過實驗找到了該車燈模組在進行可見光通信時的最佳工作點,即驅動電流為340 mA,信號幅值為0.7 V。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25