并聯踝康復機器人的系統搭建與運動控制策略
2019-04-17 08:13:38李劍鋒張子康張雷雨董明杰左世平張凱
中南大學學報(自然科學版) 2019年11期
關鍵詞:康復
李劍鋒,張子康,張雷雨,董明杰,左世平,張凱
(北京工業大學機械工程與應用電子技術學院,北京,100124)
隨著我國老齡化的加劇,腦卒中發病率逐步升高,多數患者存在足下垂導致的下肢運動功能障礙[1?3]。同時,馬蹄足內/外翻亦屬于我國少年骨科多發病,需進行踝關節松解、矯形手術治療。為改善下肢運動功能和步態重建,上述患者均需對踝關節進行大量重復性的康復訓練。傳統的康復訓練療法是康復治療師對患者進行一對一的徒手康復治療,其不足之處是效率低下、勞動強度大、缺乏科學有效的數據監測與反饋,難以對患者的康復狀況進行數值化評價。為彌補上述不足,人們相繼開展了踝康復機器人的相關研究工作。GIRONE 等[4?5]研制了基于Stewart 型平臺的六自由度Rutgers Ankle,通過虛擬現實與力反饋技術實現康復訓練的力觸覺反饋功能,但該系統結構復雜,成本較高;SAGLIA 等[6]開發了高性能兩自由度踝康復機構,通過驅動冗余消除奇異性,提升其工作空間。CHANG等[7?8]利用串聯式彈性驅動,搭建了鉸鏈式踝足康復系統,采用旋轉電位計測量踝關節背屈角度,同時在足底增加了6個壓力傳感器,用于檢測行走過程中接觸力及人體重心分布。WANG 等[9?10]研制了3-UPS/RRR和3-RUS/RRR 冗余驅動踝康復機器人,通過冗余驅動避免裝置在工作過程中的奇異性,提高機器人的剛度和運動靈活性。禹潤田等[11]設計了繩驅動并聯踝康復機器人,采用繩驅方式,在運動過程中可避免剛性桿件慣性沖擊,安全性較高。邊輝等[12]研發了4-UP(Pe)S/PS 康復機構,將人體小腿置于機構中心,4條支鏈均勻分布在人體下肢周圍,人體與支鏈共同構成生物融合式并聯踝康復機構。基于上述研究可知,人們在踝康復機器人輔助訓練方面已取得了較大突破,但仍存在一些不足,如機構自由度不足或冗余、機構旋轉中心與踝轉心難以重合、自適應調整能力及人機交互性水平較低等問題[13]。因此,研究智能康復機器人結構與控制方法,準確識別患者的運動意圖,實現機器人自適應控制與人機交互功能,是康復機器人研究的關鍵問題[14]。本文作者設計并研制了一套具有3個轉動自由度,機構旋轉中心與人體踝關節轉心重合的2-UPS/RRR 并聯踝關節康復機器人(parallel ankle rehabilitation robot,PARR),機器人系統采用上位機與下位機共同控制的分布式控制方法,基于編碼器與力/矩傳感器的力位信息檢測,實現軌跡跟蹤控制、運動意圖識別及人機交互控制,完成踝關節康復機器人主/被動康復訓練。
1 并聯踝康復機器人系統搭建
1.1 機器人機構本體設計
人體踝關節屬于滑車關節,主要運動方式為沿3個方向的定點轉動,根據踝關節運動形式及特點,可把踝關節的運動描述為分別沿坐標軸Xa,Ya和Za的轉動,實現距骨滑車相對關節球窩完成背伸/趾屈、內翻/外翻與內收/外展運動[15],如圖1所示。由于存在人體差異,踝關節運動幅度不盡相同,正常人體踝關節運動范圍如表1所示[16]。
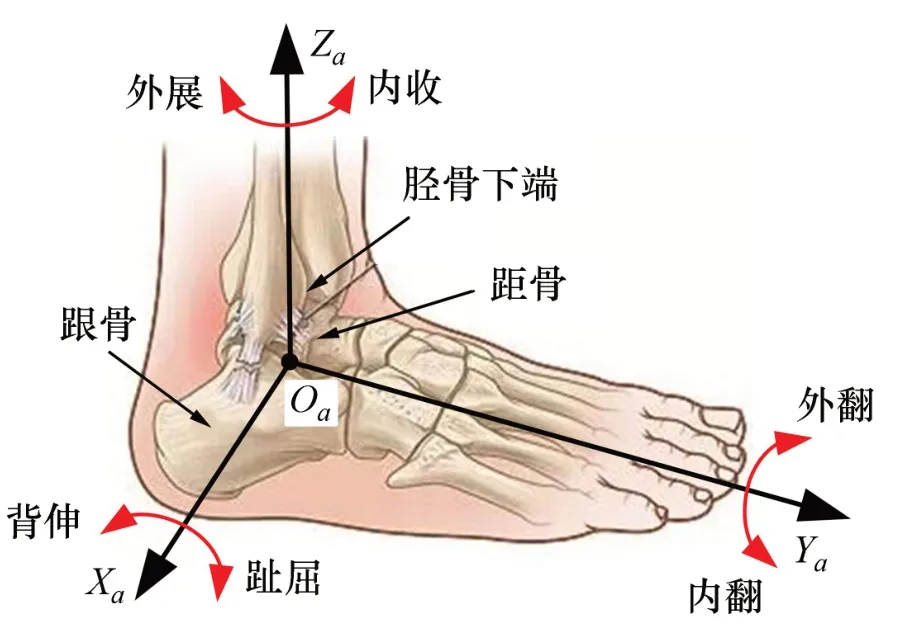
圖1 踝關節骨骼結構Fig.1 Skeleton structure of ankle joint
李劍鋒等[17]對現有的踝康復機器人構型進行綜合與優選,提出了基于并聯機構構型的3自由度2-UPS/RRR 踝康復機器人構型(其中,P和R分別表示主動移動副和轉動副),進而完成并聯踝康復機器人的結構設計與分析。并聯踝康復機器人機械結構主要由定平臺、動平臺、2條UPS支鏈(U1P1S1和U2P2S2)和1條串聯的RRR約束支鏈(R1,R2和R3)組成,如圖2所示。其中,約束支鏈為1個等效球關節支鏈,其3 條轉軸軸線正交于1 點O,該點即為機構旋轉中心與人體踝關節旋轉中心的重合點;UPS 支鏈由虎克副U、移動副P和球副S 組成,2條UPS 支鏈對稱分布在機構動平臺兩側,UPS 支鏈的虎克副U與球副S分別與定平臺和動平臺固定連接。踝康復機器人具有3個轉動自由度,分別繞定坐標系OXOYOZO的XO軸、YO軸、ZO軸轉動。該機器人通過驅動移動副P1、移動副P2和轉動副R1實現3個自由度的轉動運動,移動副P1和P2分別通過電動推桿代替,實現直線運動功能,在轉動副R1位置安裝了步進電機,實現轉動運動功能。在機器人轉動副R1,R2和R3位置均安裝了絕對式編碼器,分別用于檢測踝康復機器人做背伸/趾屈、內翻/外翻與內收/外展運動的角度與角速度信息,實現機器人的軌跡跟蹤控制。
2-UPS/RRR 并聯踝康復機器人動平臺主要包括上平臺、傳感器支座和下平臺3個部分,力/矩傳感器安裝在上平臺與下平臺之間,如圖3所示。踝關節康復運動時產生的力矩作用在上平臺表面,在上平臺與傳感器支座之間安裝有4個拉壓力傳感器,呈矩形均勻分布在機構轉心四周。當踝關節做背伸運動時,傳感器1和2承受向上的拉力,傳感器3和4承受向下的壓力,根據傳感器讀數和布置尺寸,通過計算可得到背伸運動轉矩;反之,當踝關節做趾屈運動時,同樣可得到趾屈運動轉矩。同理,踝關節做內翻/外翻運動時產生的拉/壓力分別通過傳感器1和3 與傳感器2和4 測量,經計算得到其對應力矩。在傳感器支座與下平臺之間安裝有單軸扭矩傳感器,可直接檢測踝關節做內收/外展運動時的轉矩。因此,力/矩傳感器與絕對值編碼器共同構成了踝康復機器人的力/位信息采集系統。

圖3 力矩信息采集系統架構Fig.3 Structure of torque information collection system
1.2 機器人的控制系統搭建
機器人除了具備機械本體外,與其配套的控制系統亦必不可少,對于多自由度機器人的運動控制,主要有集中式和分布式,踝康復機器人采用上位機+下位機的分布式控制方式[18]。上位機用于搭建人機交互界面,設定/修改機器人的運動參數,并實時顯示機器人的運動狀態信息;下位機用于接收上位機的運動指令,控制機器人動平臺做出相應運動,同時,下位機采集各傳感器的數據,并將采集和處理后的力/位傳感器信息發送給上位機。人機交互功能可通過人體肌電信號和力/位置信息2種途徑實現[19]。本文利用力/矩傳感器和絕對值編碼器組成的力位信息采集系統,獲取人機之間的作用力矩及機器人動平臺各自由度的位置信息,實現人機阻抗控制和交互功能[20]。采用2個電動推桿和步進電機作為驅動單元,絕對值編碼器用于檢測動平臺轉動角度與角速度,進而得到動平臺的姿態特征,并通過反饋閉環調節電機的運動,實現機器人的軌跡跟蹤閉環控制,控制系統硬件組成如圖4所示。

圖4 控制系統硬件組成Fig.4 Hardware of control system
在康復訓練前期,當踝關節肌力較弱,難以實現自主運動時,采用被動康復訓練模式,機器人按照醫師規劃的運動軌跡,帶動踝關節進行反復康復訓練。當踝關節恢復部分運動功能時,采用主動康復訓練模式[21],通過檢測踝關節施加在動平臺表面力/矩的大小和方向,判斷患者的運動意圖,輔助踝關節按照識別出的運動意圖方向進行康復訓練運動。隨著康復訓練效果的累積與患者踝關節運動功能的逐漸恢復,可逐漸增加康復訓練的運動幅度與運動阻抗,訓練踝關節自身的運動范圍和力量。
2 機器人運動學模型的建立
踝康復機器人具有3個轉動自由度,由電動推桿和步進電機驅動,通過控制驅動電機的轉速,實現對機器人運動的精確控制,因此,需要建立電機驅動速度vi(i=1,2和3)到動平臺角速度ω的映射關系。如圖5所示,在定坐標系OXOYOZO的原點O處建立動坐標系MXMYMZM,且與動平臺固連,兩者在初始位置重合。Ai和Bi(i=1,2)分別為虎克副中心點和球副中心點,在Ai位置建立坐標系AiXA,iYA,iZA,i,ZA,i坐標軸與矢量AiBi重合,在Bi位置建立坐標系BiXB,iYB,iZB,i,并與AiXA,iYA,iZA,i坐標系平行。
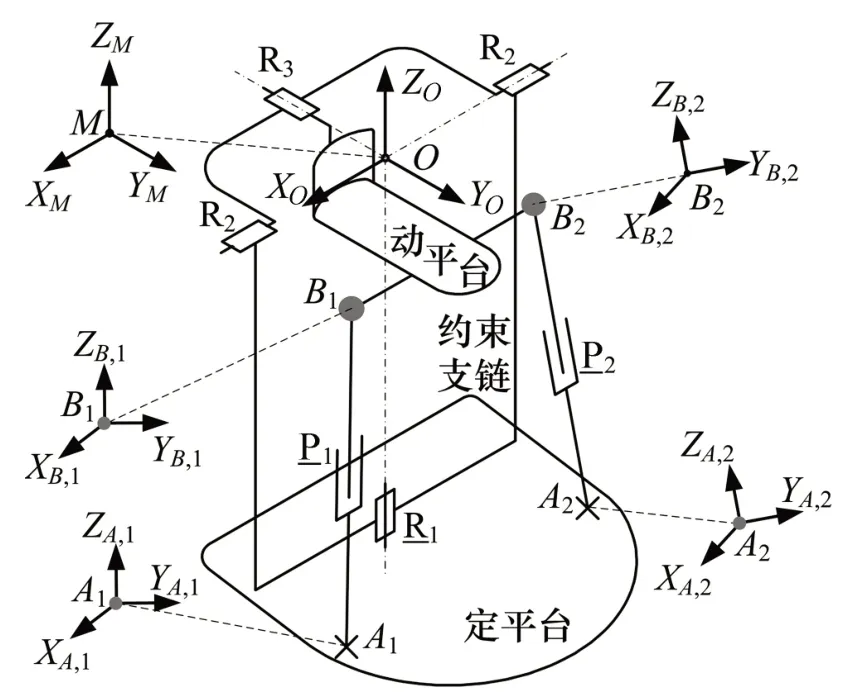
圖5 踝康復機構坐標示意圖Fig.5 Diagram of Coordinate of ankle rehabilitation mechanism
動平臺的運動姿態采用歐拉角表示,動平臺繞坐標軸XO,YO和ZO的轉角分別用α,β和γ表示,則動坐標系MXMYMZM相對于定坐標系OXOYOZO可以表示為

球副Si(i=1,2)固定于電動推桿前端,其沿移動副Pi方向的運動速度即為移動副的運動速度,球副中心點Bi(i=1,2)在定坐標系OXOYOZO中的位置矢量OBi與速度VB,i可分別表示為:
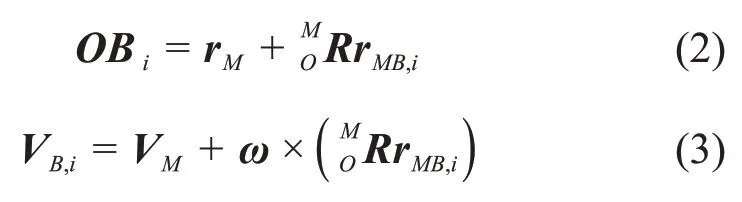
式中:rM為原點M在坐標系OXOYOZO下的位置矢量;VM為動坐標系原點M的速度;ω為角速度矩陣;rMB,i為點Bi在動坐標系MXMYMZM中的矢量坐標。
將VB,i沿ZB,i坐標軸分解得球副中心點Bi沿ZB,i坐標軸的速度VZB,i

式中:ZB,i為Bi沿ZB,i坐標軸的方向向量,且ZB,i=。
由UPS 支鏈的結構特點及式(3)和式(4)可得UPS支鏈的伸出速度vi:

由機器人機構特征可知動平臺繞坐標軸ZM轉動的角速度v3為:

式中:ωγ為轉動副R1處步進電機的角速度。
參照人體踝關節的運動參數范圍,在保證機器人工作空間的前提下對機器人結構參數進行優化,得到在機器人初始狀態下點Ai和Bi在定坐標系OXOYOZO下的坐標值,如表2所示。

表2 點Ai和Bi的坐標值Table 2 Coordinate values of points Ai and Bi
將踝康復機器人結構參數代入式(5)和式(6),借助Matlab軟件進行數學計算。
1)當機器人做背伸/趾屈運動時,電動推桿1的速度VX,P1、電動推桿2的速度VX,P2及步進電機的速度VX,R1分別為:

式中:f1(α)和f2(α)為關于角度α的函數;ωα為動平臺繞XM的角速度。
2)當機器人做內翻/外翻運動時,速度參數VY,P1,VY,P2及VY,R1分別為:

式中:f1(β)和f2(β)為關于角度β的函數;ωβ為動平臺繞YM的角速度。
3)當機器人在做內收/外展運動時,速度參數VY,P1,VY,P2及VY,R1分別為:

式中:f1(γ)和f2(γ)為關于角度γ的函數。
由式(7)~(15)可知:電動推桿的速度與動平臺運動角速度呈非線性關系,因此,要滿足康復訓練過程中動平臺的恒定角速度,需對電動推桿速度進行精準控制。
3 康復訓練控制策略
與工業、家用等機器人相比,康復機器人的作業對象是人,故對機器人系統的可靠性、準確性及智能程度要求更高[22]。在機器人應用中,人和機器通過信息交流共同完成同一目標即為人機交互,而人機交互功能實現的前提就是機器人能夠準確識別人的運動意圖,配合其完成期望運動。在康復機器人中,多將人機交互力/矩作為人的運動意圖,通過識別該運動意圖完成特定動作,而本文提出的踝康復機器人是基于角度、力矩信息檢測的運動意圖識別與人機交互控制,開發主、被動康復訓練功能,輔助完成人體踝康復訓練工作。
3.1 被動康復訓練
踝康復機器人被動康復訓練需要根據患者的肌力等級,設定康復訓練運動軌跡(角度、位置)及最大運動角速度,動平臺帶動踝關節沿預定軌跡運動,絕對值編碼器持續檢測動平臺各自由度的運動位置,與預定軌跡實時對比,并加入PD控制對系統進行實時比例?微分控制,保證康復訓練軌跡的準確性與穩定性[23]。系統控制方程為

式中:ωp為被動康復模式下角速度ω的任意分量,KP和KD分別為比例系數和微分系數;qd,和分別為動平臺運動的目標角度、期望角速度和期望角加速度;q,和分別為動平臺當前的角度、角速度和角加速度;qe和分別為動平臺運動的角度誤差和角速度誤差。
由式(16)可知:設定合適的比例系數KP和微分系數KD,再根據編碼器實時讀取的角度和計算出的角速度與角加速度,結合設定的運動軌跡,即可得到動平臺在各位置運動的角速度ω,再結合式(7)~(15)可計算出驅動電機運動速度,驅動PARR按照預設的運動軌跡運動,其系統控制流程如圖6所示。

圖6 被動康復訓練控制流程圖Fig.6 Control flow chart of passive rehabilitation training
3.2 主動康復訓練
踝康復機器人主動康復訓練功能是基于人機交互與導納控制實現的,導納理論來源于機械阻抗、速度和作用力之間的關系,導納控制可以建立人體踝關節與機構之間的交互力以及機構運動軌跡調整之間的動態關系[24?25],使康復機器人按照患者的主動運動意圖來調整康復訓練運動路徑,實現患者主動、機器輔助的主動康復訓練功能[26]。醫師基于患者的肌力等級和患者人體特征預先對各康復訓練方向運動幅度和導納參數進行設定,當踝足沿某方向在動平臺上施加的交互力矩達到阻抗力矩閾值且在設定的運動范圍內時,機器人提供輔助力矩,動平臺則按踝關節力矩方向運動,超出設定運動范圍則停止該方向的運行,保證康復訓練的準確性與安全性。若在運動過程中該方向所受交互力矩減小至阻抗力矩閾值以下,機器人則停止運行,若該方向或其他方向力矩高于其對應的阻抗力矩閾值,機器人則按其對應的軌跡運動。主動康復訓練控制流程如圖7所示。
當人體踝關節與機器人產生交互力矩時,為了分析方便,僅考慮單方向的阻抗控制模型,通過阻抗控制產生相應的位置修正量,將位置修正量加入軌跡控制以實現主動康復訓練控制。假設踝關節與康復機器人之間的交互力為ef,則其阻抗控制可表示為

圖7 主動康復訓練控制流程圖Fig.7 Control flow chart of active rehabilitation training

式中:md為目標慣量;bd為目標阻尼;kd為目標剛度;Δq為角度修正量;為角速度修正量;為角加速度修正量。
經過阻抗控制得到修正后的期望角度qc、期望角速度和期望角加速度分別為

3.3 控制界面及操作流程
由于踝康復機器人采用上位機+下位機的控制方式,根據系統結構與控制功能需要,上位機系統和下位機系統均采用獨立式結構,兩者通過無線傳輸的方式完成信息交換功能。上位機是機器人操控面板的載體,通過上位機可完成主、被動康復訓練等功能的操控。康復訓練控制界面如圖8所示,在該操作界面可完成機器人運行/停止、主/被動康復訓練及運動信息讀取等,而運動軌跡規劃、速度設定及阻抗力矩設定等其他功能則需要切換至其他界面。
下位機是以嵌入式微處理器為核心的運動控制系統,具有角度和力/矩信息的采集與處理、電機速度控制、數據信息發送與接收等功能,康復訓練的所有運動均由下位機控制。在進行康復訓練時,首先,通過上位機選擇康復訓練模式,根據訓練需要設定各個運動參數,規劃運動軌跡或選擇運動類型;開始康復訓練后,按照系統指示操作即可進行相應的訓練動作,同時,可實時通過上位機操作對訓練內容進行更改、停止訓練,上位機可對運動軌跡進行記錄與還原。康復運動控制流程圖如圖9所示。

圖8 康復訓練控制界面Fig.8 Control interface of rehabilitation training

圖9 康復運動控制流程圖Fig.9 Control flow chart of rehabilitation exercise
4 實驗驗證
4.1 實驗平臺的搭建
基于上述構型與控制系統設計,研制1臺并聯踝康復機器人樣機,實現基于運動意圖識別及人機交互的主、被動康復訓練功能。遴選8名受試者(6 名男生,2 名女生,平均年齡26 歲)進行踝康復訓練實驗,受試者坐在專用座椅上,足底與動平臺接觸,調節座椅高度,使其與受試者大腿保持水平狀態,確保人體腿部重力作用在座椅上,其腳踝通過綁帶固定在機器人動平臺上,調節動平臺高度及腳固定位置,使機器人轉心與踝轉心重合。在康復實驗中,分別進行被動/主動康復訓練的背伸/趾屈、內翻/外翻、內收/外展運動實驗,對比分析采集數據與預期數據的吻合度,計算運動誤差,驗證機器人控制系統的可行性與穩定性。
4.2 測量與理論數據的對比分析
在被動康復訓練實驗中,設定康復訓練背伸/趾屈、內翻/外翻和內收/外展運動的角速度分別為3.2°/s、2.7°/s和3.2°/s,從動平臺初始位置開始,分別進行背伸—趾屈—背伸、內翻—外翻—內翻及內收—外展—內收動作,每個動作連續運動1個周期,采集實驗過程中的角度數據,與預期的角度信息進行對比,以其中一名受試者為例,其背伸/趾屈角α、內翻/外翻角β及內收/外展角γ隨時間t的變化曲線如圖10所示。
由圖10 可知:踝康復機器人實際運動軌跡與期望軌跡具有較高的吻合度,在整個運動過程中,角度曲線斜率恒定,機器人動平臺以恒定的角速度運行,運動平穩,平均角度誤差小于3°。因此,被動康復訓練運動控制策略是有效的,對電機的速度控制也較為精確,滿足被動康復訓練需要。
在主動康復訓練實驗中,受試者依次進行背伸/趾屈、內翻/外翻及內收/外展動作,其阻抗力矩閾值分別設為8,6和8 N·m,每個動作循環進行8個周期,采集運動過程中的力位信息,對比分析角度α,β與γ的變化與力矩TX,TY與TZ之間的對應關系。主動康復訓練角度與力矩曲線如圖11所示。
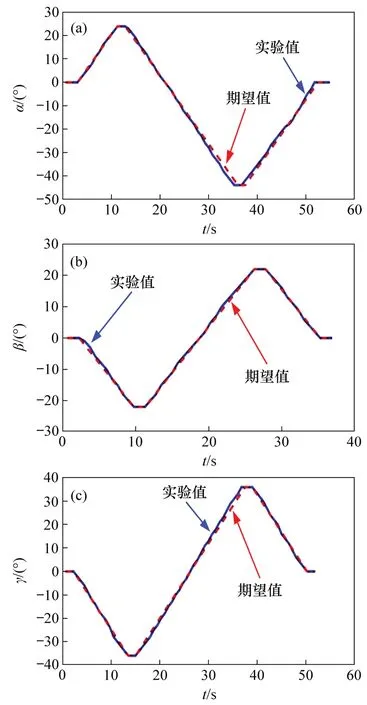
圖10 被動康復訓練角度的變化Fig.10 Changes of angle of passive rehabilitation training
由圖11可知:1)踝康復機器人在起動/停止時刻響應迅速且運動平穩,在運動的準確性、穩定性、響應速度方面均滿足康復訓練使用要求;2)康復訓練過程中力矩曲線變化平穩,反應靈敏,不存在較大的波動,能夠滿足準確識別患者運動意圖的需要;3)當動平臺所受力矩達到設定的阻抗力矩閾值后,動平臺按照所受力矩方向勻速運動,當動平臺所受力矩小于設定的阻抗力矩時,動平臺停止運動,判斷準確,可較好地完成輔助康復訓練的任務。

(a)α與力矩TX;(b)β與力矩TY;(c)γ與力矩TZ
5 結論
1)設計了2-UPS/RRR 并聯踝康復機器人,并完成了機器人結構設計與控制系統的搭建,采用上位機+下位機的控制方式,通過編碼器與力/矩傳感器共同檢測力位信息,用于輔助踝關節進行康復訓練。
2)建立了踝康復機器人的運動學模型并完成了運動學分析,推導出驅動電機速度與動平臺角速度之間的映射關系,基于角度、力矩信息檢測的運動意圖識別與人機交互控制,制定了完整的機器人康復訓練運動控制策略,能夠實現踝關節主動與被動康復訓練功能。
3)遴選受試者進行踝康復訓練實驗,檢驗機器人的主、被動康復訓練功能。對比分析了被動康復訓練過程中實驗值與期望值的吻合度及主動康復訓練過程中關節角度隨力矩變化的關系,驗證了所設計的踝康復機器人運動的穩定性及系統控制方案的有效性。
猜你喜歡
康復(2023年11期)2023-11-20 07:45:54
康復(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(2021年2期)2021-03-05 08:10:44
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復醫學(2017年7期)2017-01-16 01:11:02
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45