基于EEMD多尺度樣本熵的S700K轉(zhuǎn)轍機(jī)故障診斷
2019-04-17 08:13:38魏文軍劉新發(fā)
中南大學(xué)學(xué)報(bào)(自然科學(xué)版) 2019年11期
魏文軍,劉新發(fā)
(1.蘭州交通大學(xué)自動(dòng)化與電氣工程學(xué)院,甘肅蘭州,730070;2.蘭州交通大學(xué)光電技術(shù)與智能控制教育部重點(diǎn)實(shí)驗(yàn)室,甘肅蘭州,730070)
轉(zhuǎn)轍機(jī)、信號(hào)機(jī)、軌道電路作為鐵路信號(hào)設(shè)備室外三大件,是鐵路運(yùn)輸?shù)年P(guān)鍵控制設(shè)備,其中轉(zhuǎn)轍機(jī)用于轉(zhuǎn)換道岔、改變列車(chē)運(yùn)行線(xiàn)路。當(dāng)?shù)啦磙D(zhuǎn)換到位后,通過(guò)缺口檢查,需確認(rèn)道岔尖軌與基本軌之間是否達(dá)到規(guī)定的密切程度,從而保證列車(chē)通過(guò)道岔時(shí)的行車(chē)安全。隨著我國(guó)鐵路朝高速、重載的方向發(fā)展,S700K提速道岔轉(zhuǎn)轍機(jī)在鐵路線(xiàn)路中得到普遍應(yīng)用,由于其安裝在室外,受風(fēng)沙、雨雪、酷寒等自然條件和列車(chē)沖擊、尖軌爬行、橫移等外界因素影響大,一直是故障率較高的鐵路信號(hào)設(shè)備。某鐵路局統(tǒng)計(jì)了近四年來(lái)鐵路信號(hào)設(shè)備在運(yùn)行過(guò)程中發(fā)生故障的情況,發(fā)現(xiàn)轉(zhuǎn)轍設(shè)備故障占所有信號(hào)設(shè)備故障總數(shù)的40%以上[1]。目前,現(xiàn)場(chǎng)對(duì)S700K轉(zhuǎn)轍機(jī)的故障檢測(cè)主要依靠人工分析功率曲線(xiàn)的變化規(guī)律來(lái)判斷故障,或者設(shè)天窗點(diǎn)對(duì)現(xiàn)場(chǎng)設(shè)備進(jìn)行定期檢修[2],這種檢測(cè)方式不僅效率低,工人的工作量大且容易發(fā)生錯(cuò)判、漏判現(xiàn)象而危及行車(chē)安全。目前人們對(duì)S700K電動(dòng)轉(zhuǎn)轍機(jī)的智能故障診斷方法進(jìn)行了一定研究,但各種方法都有其局限性。薛艷青等[3?4]采用專(zhuān)家系統(tǒng)對(duì)轉(zhuǎn)轍機(jī)電氣參數(shù)變化規(guī)律進(jìn)行了分析,但建立大量的專(zhuān)家知識(shí)庫(kù)比較困難。EKER等[5?6]使用支持向量機(jī)構(gòu)造經(jīng)驗(yàn)?zāi)P瓦M(jìn)行S700K 轉(zhuǎn)轍機(jī)的故障診斷。王瑞峰等[7?8]將神經(jīng)網(wǎng)絡(luò)及其改進(jìn)的算法用于轉(zhuǎn)轍機(jī)故障類(lèi)型識(shí)別,當(dāng)網(wǎng)絡(luò)模型較大時(shí),計(jì)算量可能呈指數(shù)倍增長(zhǎng)。肖蒙等[9]用貝葉斯網(wǎng)絡(luò)進(jìn)行故障診斷,先驗(yàn)概率難以確定,并且如果樣本數(shù)量小,故障診斷效果不理想。安春蘭等[10]基于小波包分解的方法需要預(yù)先設(shè)定基函數(shù)和分解尺度等參數(shù),小波參數(shù)的選擇直接影響診斷結(jié)果。S700K轉(zhuǎn)轍機(jī)動(dòng)作功率曲線(xiàn)呈非線(xiàn)性、非平穩(wěn)的特點(diǎn),每一種故障類(lèi)型下的動(dòng)作功率曲線(xiàn)具有各自不同的特點(diǎn),且在某一段時(shí)間或特征尺度上也有明顯的區(qū)別。考慮到集合經(jīng)驗(yàn)?zāi)B(tài)分解(EEMD)算法已成功應(yīng)用在軸承的故障監(jiān)測(cè)中[11?12],能夠準(zhǔn)確地提取軸承的故障信息,樣本熵成功地應(yīng)用于高壓斷路器故障特征的提取[13],模糊聚類(lèi)分析算法能夠支持多種故障同時(shí)檢測(cè)[14],本文作者利用從微機(jī)監(jiān)測(cè)系統(tǒng)采集的轉(zhuǎn)轍機(jī)動(dòng)作功率曲線(xiàn),提出一種基于EEMD 多尺度樣本熵的轉(zhuǎn)轍機(jī)智能故障診斷新方法。首先,對(duì)S700K 轉(zhuǎn)轍機(jī)不同的動(dòng)作功率曲線(xiàn)進(jìn)行EEMD 分解,得到不同時(shí)間尺度的固有模態(tài)函數(shù)(IMF);然后,計(jì)算每個(gè)IMF 分量的樣本熵作為故障特征參數(shù),利用模糊聚類(lèi)分析算法進(jìn)行故障分類(lèi),從而確定轉(zhuǎn)轍機(jī)的運(yùn)行狀態(tài)。
1 轉(zhuǎn)轍機(jī)動(dòng)作功率曲線(xiàn)分析
道岔在轉(zhuǎn)換過(guò)程中,轉(zhuǎn)轍機(jī)的運(yùn)行狀態(tài)可以通過(guò)工作時(shí)的輸出拉力體現(xiàn),同時(shí)轉(zhuǎn)轍機(jī)的動(dòng)作功率也能直接反映輸出拉力[15]。目前我國(guó)微機(jī)監(jiān)測(cè)系統(tǒng)通過(guò)采集轉(zhuǎn)轍機(jī)工作時(shí)的電流與功率來(lái)反映其工作狀態(tài),由于S700K轉(zhuǎn)轍機(jī)采用380 V交流異步電機(jī),因此在電流與電壓之間存在相位差,僅通過(guò)電流情況不能反映轉(zhuǎn)轍機(jī)工作時(shí)輸出功率的變化,TJWX-2006 型信號(hào)微機(jī)監(jiān)測(cè)系統(tǒng)新增了對(duì)S700K轉(zhuǎn)轍機(jī)功率監(jiān)測(cè)的功能。通過(guò)分析轉(zhuǎn)轍機(jī)動(dòng)作功率曲線(xiàn),可對(duì)道岔的電氣特性、機(jī)械特性以及時(shí)間特性進(jìn)行判斷。圖1所示為S700K交流電動(dòng)轉(zhuǎn)轍機(jī)在運(yùn)行過(guò)程中的正常動(dòng)作功率曲線(xiàn),大致可以分為解鎖、轉(zhuǎn)換和鎖閉3個(gè)階段。
1)解鎖階段。在0.15 s左右時(shí),由于電動(dòng)機(jī)電源已接通,轉(zhuǎn)轍機(jī)啟動(dòng)需要較大的功率,功率曲線(xiàn)驟然上升并達(dá)到峰值,此時(shí),道岔表示電路斷開(kāi),完成轉(zhuǎn)轍機(jī)的解鎖后,電流迅速出現(xiàn)回落。
2)轉(zhuǎn)換階段。解鎖完成后,動(dòng)作桿帶動(dòng)道岔尖軌或可動(dòng)心軌正常運(yùn)行,轉(zhuǎn)轍機(jī)動(dòng)作功率曲線(xiàn)在這一階段趨于平穩(wěn)。
3)鎖閉階段。在5.1 s 左右時(shí)由于道岔轉(zhuǎn)換完畢,功率曲線(xiàn)出現(xiàn)一定幅度下降,但不會(huì)降為0 kW,之后隨著道岔位置的給出,相關(guān)電路被切斷,功率降為0 kW。
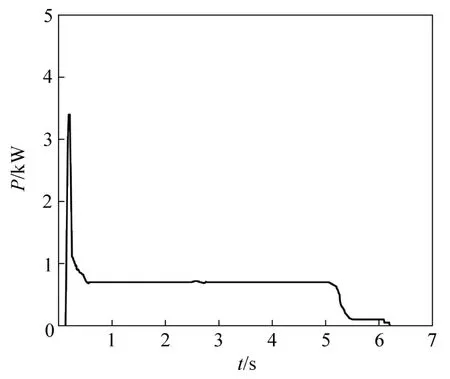
圖1 S700K正常動(dòng)作功率曲線(xiàn)Fig.1 Normal operation power curve of S700K
根據(jù)道岔轉(zhuǎn)換系統(tǒng)故障機(jī)理進(jìn)行分析,轉(zhuǎn)轍機(jī)在運(yùn)行過(guò)程中出現(xiàn)的故障可以分為電氣故障和機(jī)械故障。現(xiàn)場(chǎng)維護(hù)記錄顯示,S700K交流電動(dòng)轉(zhuǎn)轍機(jī)在上道使用的過(guò)程中,經(jīng)常出現(xiàn)的幾種故障類(lèi)型對(duì)應(yīng)的功率曲線(xiàn)如圖2所示(其中,f1~f8為故障代碼)。
2 基于EEMD多尺度樣本熵算法
2.1 EMD與EEMD算法
經(jīng)驗(yàn)?zāi)B(tài)分解(EMD)算法是一種針對(duì)非平穩(wěn)信號(hào)的分解方法,原始信號(hào)經(jīng)EMD分解后得到若干個(gè)固有模態(tài)函數(shù)(IMF),IMF 表征信號(hào)的內(nèi)在特征振動(dòng)形式。IMF分量需要滿(mǎn)足2個(gè)條件:在整個(gè)數(shù)據(jù)序列中,極值點(diǎn)的數(shù)量與過(guò)零點(diǎn)的數(shù)量最多相差1個(gè);由局部極大值確定的上包絡(luò)線(xiàn)與局部極小值確定的下包絡(luò)線(xiàn)的均值為0。設(shè)從微機(jī)監(jiān)測(cè)系統(tǒng)獲得的S700K 轉(zhuǎn)轍機(jī)的功率曲線(xiàn)為P(t),利用EMD 算法分解后得到1 組IMF 分量ci和余項(xiàng)rn的和,即

原始信號(hào)經(jīng)EMD 分解不能有效地將特定時(shí)間尺度的模態(tài)函數(shù)分離,使得不同的模態(tài)函數(shù)出現(xiàn)在同一個(gè)分解結(jié)果中,或者將同一個(gè)模態(tài)分量分解到多個(gè)分解結(jié)果中,即產(chǎn)生了模態(tài)混疊現(xiàn)象。HUANG等[16]認(rèn)為極點(diǎn)值的選擇是造成模態(tài)混疊的原因。EEMD算法通過(guò)在原始信號(hào)P(t)中添加時(shí)域均值為0,頻域功率譜均勻分布的高斯白噪聲,并對(duì)疊加后的信號(hào)進(jìn)行多次EMD分解,取IMF分量的均值作為最終結(jié)果。高斯白噪聲具有零均值的統(tǒng)計(jì)特性,可以消除原始信號(hào)中的間歇現(xiàn)象從而抑制模態(tài)混疊的發(fā)生。
EEMD算法的計(jì)算過(guò)程[17]如下:
1)對(duì)原始信號(hào)P(t),首先初始化變量i=1,并設(shè)置集合平均次數(shù)M。
2)在P(t)中多次加入均值為0,幅值為原始信號(hào)標(biāo)準(zhǔn)差0.1~0.4倍的高斯白噪聲hi(t),即

式中:Pi(t)為第i次加入高斯白噪聲的信號(hào)。
3)對(duì)Pi(t)分別進(jìn)行EEMD分解,得到1組IMF分量cij(t)與1個(gè)殘余分量ri(t),即

式中:cij(t)為第i次加入白噪聲后,分解得到的第j個(gè)IMF分量;J為IMF分量的個(gè)數(shù)。
4)重復(fù)步驟2)和步驟3)M次,將以上步驟所得對(duì)應(yīng)IMF 分量進(jìn)行總體平均,消除加入高斯白噪聲的影響,得到最終的IMF分量cj(t)為

5)信號(hào)P(t)的最終EEMD分解結(jié)果為

式中:r(t)為信號(hào)P(t)經(jīng)EEMD分解后的殘余分量。
2.2 多尺度樣本熵
S700K 功率信號(hào)經(jīng)過(guò)EEMD 分解得到不同時(shí)間尺度的固有模態(tài)函數(shù),實(shí)現(xiàn)功率信號(hào)的自適應(yīng)多尺度化,然后對(duì)每一個(gè)IMF 分量提取樣本熵Es作為該分量的特征參數(shù),即為原始信號(hào)的多尺度樣本熵。樣本熵能夠衡量非線(xiàn)性、非平穩(wěn)信號(hào)的復(fù)雜度,具有無(wú)需自我匹配度、計(jì)算快、精度高的優(yōu)點(diǎn),因此可以用樣本熵衡量S700K 轉(zhuǎn)轍機(jī)功率信號(hào)的復(fù)雜度。轉(zhuǎn)轍機(jī)功率信號(hào)成分單一,周期性越明顯,樣本熵越小;反之,信號(hào)復(fù)雜度越高,樣本熵越大。
樣本熵算法的具體計(jì)算步驟[18]如下:

圖2 常見(jiàn)故障所對(duì)應(yīng)的功率曲線(xiàn)Fig.2 Power curves corresponding to common faults
1)設(shè)一時(shí)間序列{x(n),n=1,2,…,N},對(duì)其進(jìn)行相空間重構(gòu),得到矩陣X

式中:N為數(shù)據(jù)長(zhǎng)度;m為模式維數(shù);1≤i,j,K≤N-m+1。
2)計(jì)算向量X(i)與向量X(j)中對(duì)應(yīng)元素的最大差值,將其絕對(duì)值定為兩者之間的距離d(i,j)

式中:0≤k≤m-1;1≤i,j≤N-m+1,j≠i。
3)將d(i,j)<γ的數(shù)量記為Ci,記Ci與向量總數(shù)N?m的比值為,即

式中:γ為相似容限參數(shù),其定義為原一維時(shí)間序列標(biāo)準(zhǔn)差的R倍,即γ=R×σ(σ為原始數(shù)據(jù)的標(biāo)準(zhǔn)差)。則M?m+1個(gè)的值為

4)模式維數(shù)增加1,獲得1 組m+1 維向量,重復(fù)步驟1)~3),得

5)定義時(shí)間序列樣本熵Es為

2.3 故障特征集的建立
對(duì)圖2 中常見(jiàn)故障曲線(xiàn)任取f5進(jìn)行EEMD 分解,設(shè)定總體平均次數(shù)M=100,輔助高斯白噪聲的標(biāo)準(zhǔn)差為原始信號(hào)標(biāo)準(zhǔn)差的0.25倍,則此S700K轉(zhuǎn)轍機(jī)功率信號(hào)EEMD分解結(jié)果見(jiàn)圖3,其中C1(t)~C9(t)為IMF分量。
對(duì)S700K轉(zhuǎn)轍機(jī)正常動(dòng)作功率曲線(xiàn)f0及各種故障功率曲線(xiàn)進(jìn)行EEMD分解,提取前9個(gè)IMF分量的樣本熵Es作為故障診斷特征參數(shù)。設(shè)定原始數(shù)據(jù)長(zhǎng)度N=700,模式維數(shù)m=2,相似容限參數(shù)γ=0.2σ。本文僅展示每種故障信號(hào)前5個(gè)IMF 分量,如表1所示。
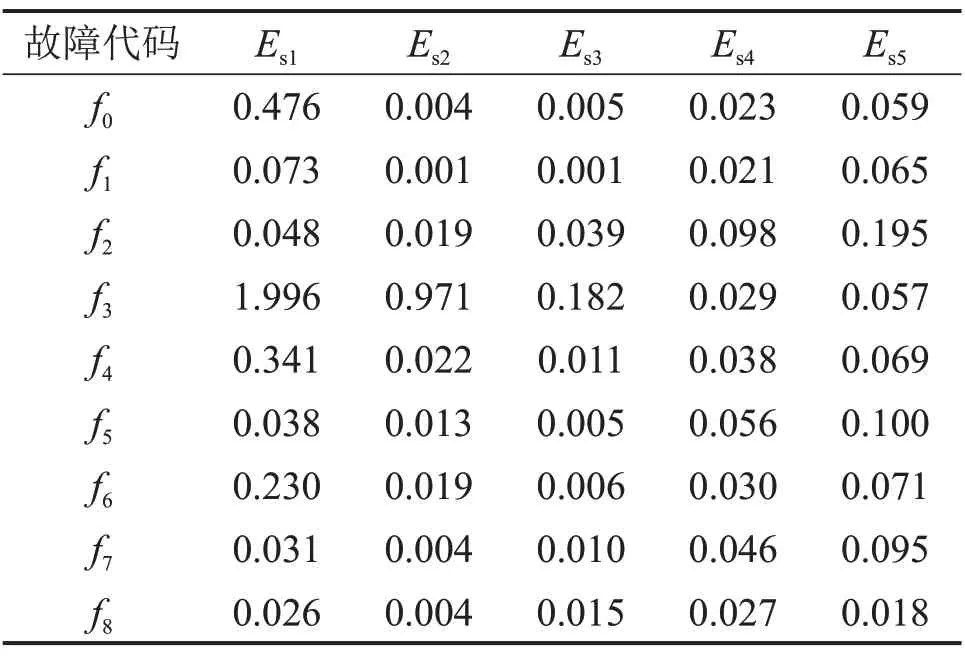
表1 故障診斷特征集Table 1 Fault diagnosis feature set
3 基于模糊聚類(lèi)方法的故障識(shí)別
3.1 模糊聚類(lèi)算法
模糊聚類(lèi)方法是一種多元分析,它把1個(gè)無(wú)類(lèi)別標(biāo)記的集合按照某種準(zhǔn)則劃分成若干個(gè)子集,使相似的樣本盡量歸到一類(lèi),不同類(lèi)型的樣本相差較大。本文采用模糊聚類(lèi)算法對(duì)S700K 轉(zhuǎn)轍機(jī)的不同故障樣本進(jìn)行分類(lèi),該方法理論嚴(yán)謹(jǐn),聚類(lèi)效果好,已經(jīng)在很多領(lǐng)域成功應(yīng)用[19?20],利用該方法能解決S700K轉(zhuǎn)轍機(jī)故障漸變的模糊性問(wèn)題。模糊聚類(lèi)算法的具體步驟如下。
1)選取S700K 電動(dòng)轉(zhuǎn)轍機(jī)不同運(yùn)行狀態(tài)下的動(dòng)作功率數(shù)據(jù),包括正常模式和表1中所示的故障模式以及待檢曲線(xiàn),共v種模式,則設(shè)論域U={x1,x2,…,xv},每種模式有q個(gè)指標(biāo)表示其性狀,即xi={xi1,xi2,…,xiq},(i=1,2,…,v),由此得到特征模式矩陣:
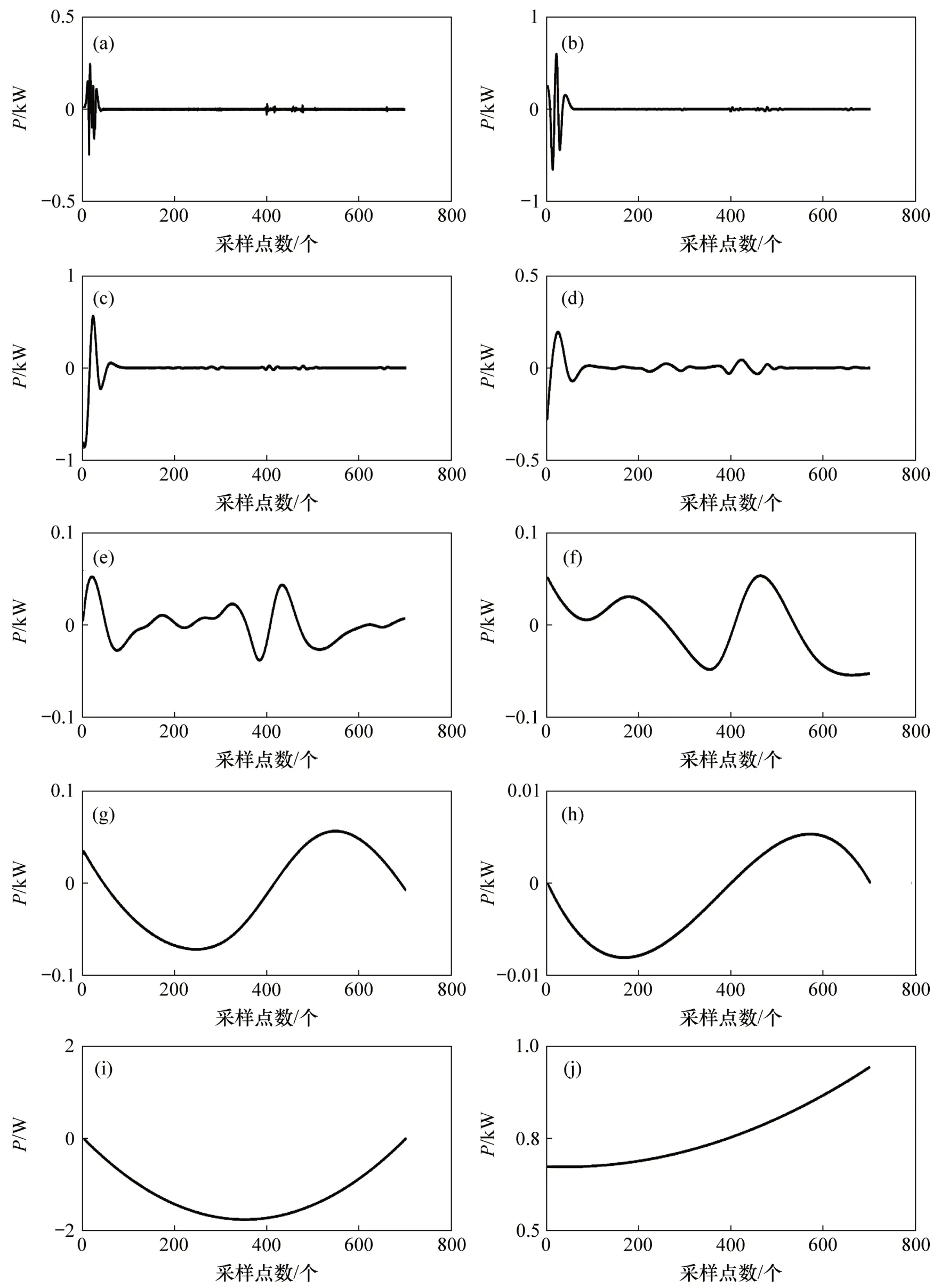
圖3 f5信號(hào)EEMD分解結(jié)果Fig.3 EEMD results of f5 signals

為了消除不同量綱的影響,使數(shù)據(jù)分布在[0,1]之間,需要分別對(duì)矩陣X進(jìn)行平移標(biāo)準(zhǔn)差變換與平移極差變換:

由于經(jīng)過(guò)平移標(biāo)準(zhǔn)差變換后,每個(gè)變量的均值為0,標(biāo)準(zhǔn)差為1,從而消除了不同量綱對(duì)特征模式矩陣的影響,但經(jīng)過(guò)變換后的變量不一定在區(qū)間[0,1]上,因此需要對(duì)變量進(jìn)行平移極差變換:
式中:k=1,2,…,m。
2)計(jì)算相似系數(shù)矩陣R,用描述樣本(xi,xj)之間相似程度的指標(biāo)rij建立矩陣X的模糊相似矩陣,rij=R(xi,xj),其確定方法有距離法與相似系數(shù)法2種,本文采用海明距離法確定rij。
式中:s為選取的合適參數(shù),使得0≤rij≤1;d(xi,xj)為xi與xj之間的距離。
3)模糊相似矩陣R不一定具有傳遞性,即矩陣R與矩陣X之間不一定存在等價(jià)關(guān)系,為了進(jìn)行分類(lèi)并形成動(dòng)態(tài)聚類(lèi)圖,可以通過(guò)模糊矩陣的褶積將其轉(zhuǎn)化為模糊等價(jià)矩陣,具體計(jì)算方法如下:R2=R°R,R4=R2°R2,…,直到滿(mǎn)足Rk°Rk=Rk時(shí)(表明Rk具有傳遞性),矩陣Rk是關(guān)于矩陣X的模糊等價(jià)矩陣,記此矩陣為R*。
4)R*是具有傳遞性的模糊等價(jià)矩陣,對(duì)于任意的λ∈[0,1],稱(chēng)Rλ=(rij(λ))為模糊等價(jià)矩陣R*=(rij)的λ?截矩陣[21],其中
則rij(λ)∈{0,1},即R*的λ?截矩陣為布爾矩陣,其中rij(λ)為1時(shí)表示將其對(duì)應(yīng)的2個(gè)樣本歸為一類(lèi),隨著λ在[0,1]范圍內(nèi)由大到小取值,其合并的樣本越來(lái)越多,最終當(dāng)時(shí),將全部樣本歸為一類(lèi)。
3.2 診斷方法流程
基于EEMD、樣本熵和模糊聚類(lèi)的S700K 轉(zhuǎn)轍機(jī)故障診斷流程如圖4所示。

圖4 故障診斷流程Fig.4 Flow chart of fault diagnosis
故障特征提取過(guò)程如下:首先利用EEMD 算法對(duì)S700K 轉(zhuǎn)轍機(jī)功率信號(hào)進(jìn)行分解,得到不同時(shí)間尺度的IMF 分量,提取每個(gè)IMF 分量的Es作為故障特征參數(shù),將各模式的特征參數(shù)組成一個(gè)特征模式矩陣。利用模糊聚類(lèi)分析算法對(duì)特征模式矩陣進(jìn)行計(jì)算,從而形成動(dòng)態(tài)聚類(lèi)圖并得到分類(lèi)結(jié)果。
4 實(shí)例驗(yàn)證及結(jié)果分析
為了驗(yàn)證本文算法的可行性,選取S700K 轉(zhuǎn)轍機(jī)在2個(gè)不同時(shí)刻下發(fā)生故障時(shí)所對(duì)應(yīng)的功率曲線(xiàn)作為待檢樣本。圖5所示為廣鐵集團(tuán)長(zhǎng)沙電務(wù)段現(xiàn)場(chǎng)某S700K轉(zhuǎn)轍機(jī)在2個(gè)不同時(shí)刻發(fā)生故障時(shí)所對(duì)應(yīng)的功率曲線(xiàn)。為了便于用模糊聚類(lèi)算法進(jìn)行運(yùn)算,令2 條曲線(xiàn)為待檢曲線(xiàn)1和待檢曲線(xiàn)2,分別記為d1和d2。利用EEMD與樣本熵算法對(duì)圖5中的曲線(xiàn)d1和d2求特征值,如表2所示。經(jīng)過(guò)現(xiàn)場(chǎng)工人的檢修,確定d1和d2所對(duì)應(yīng)的故障類(lèi)型與表1中的故障f3和f5一致。
根據(jù)表1和表2的數(shù)據(jù)構(gòu)建特征模式矩陣X,則X=[f0;f1;f2;f3;f4;f5;f6;f7;f8;d1;d2],利用模糊聚類(lèi)方法對(duì)特征模式矩陣X進(jìn)行計(jì)算,采用海明距離法計(jì)算矩陣X的模糊相似矩陣R,利用矩陣R的褶積求其等價(jià)矩陣R*,則

圖5 某S700K轉(zhuǎn)轍機(jī)發(fā)生故障時(shí)的動(dòng)作功率曲線(xiàn)Fig.5 Action power curve of S700K switch in a fault event

表2 待檢曲線(xiàn)故障特征值Table 2 Fault characteristic values of curves to be tested
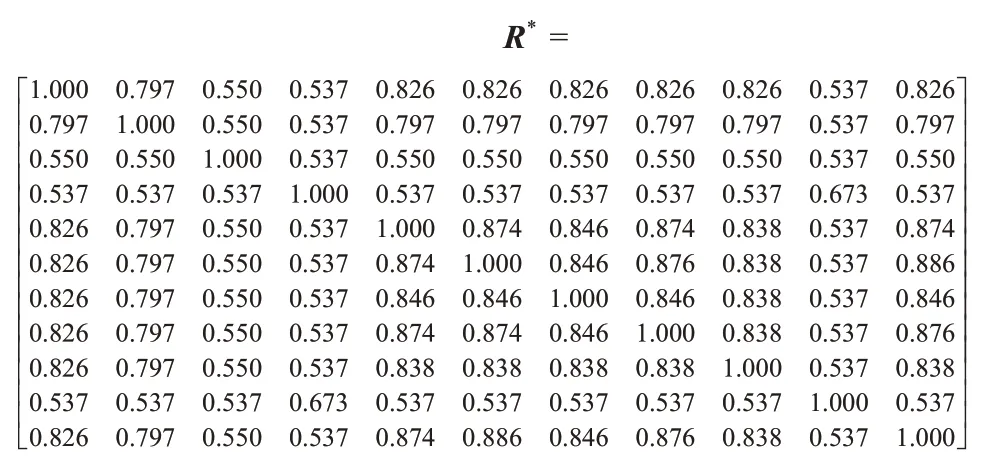
在矩陣R*中,當(dāng)λ在[0,1]范圍內(nèi)由大到小取值時(shí),可得S700K 轉(zhuǎn)轍機(jī)故障診斷系統(tǒng)的動(dòng)態(tài)聚類(lèi)圖,如圖6所示。由圖6 可知:當(dāng)λ=0.673 時(shí),當(dāng)前轉(zhuǎn)轍機(jī)運(yùn)行曲線(xiàn)d1與表1 故障曲線(xiàn)中的f3性狀最相似,因而被分為一類(lèi),當(dāng)λ=0.886時(shí),當(dāng)前轉(zhuǎn)轍機(jī)運(yùn)行曲線(xiàn)d2與表1 故障曲線(xiàn)中的f5性狀最相近,因而被分為一類(lèi),即2條故障曲線(xiàn)d1和d2對(duì)應(yīng)的故障類(lèi)型分別為故障特征集中的f3和f5,這與現(xiàn)場(chǎng)人工檢測(cè)的結(jié)果一致。
為了驗(yàn)證本文采取的算法對(duì)S700K 轉(zhuǎn)轍機(jī)故障類(lèi)型的識(shí)別性能,從微機(jī)監(jiān)測(cè)系統(tǒng)獲取了36 組S700K轉(zhuǎn)轍機(jī)動(dòng)作功率數(shù)據(jù)作為待檢樣本,對(duì)本算法性能進(jìn)行測(cè)試,測(cè)試結(jié)果為:正確率93.5%,錯(cuò)誤率6.5%。

圖6 故障診斷系統(tǒng)動(dòng)態(tài)聚類(lèi)圖Fig.6 Dynamic clustering diagram of fault diagnosis system
5 結(jié)論
1)本文利用集合經(jīng)驗(yàn)?zāi)B(tài)分解(EEMD)對(duì)功率信號(hào)進(jìn)行分解,得到1組包含故障特征的本征模態(tài)函數(shù)IMF,提取每個(gè)IMF分量的樣本熵作為故障特征參數(shù),能夠更充分地體現(xiàn)故障信號(hào)的特征。
2)基于模糊聚類(lèi)方法的故障診斷,依據(jù)不同的閾值λ可以得到不同的分類(lèi)情況,有利于對(duì)故障進(jìn)行分析和早期預(yù)測(cè)。另外,該方法支持多種故障同時(shí)檢測(cè)。經(jīng)驗(yàn)證,本文提出的方法有效提高了故障診斷的精度與效率。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
汽車(chē)維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34