基于人工傾斜攝影測量的微地形三維建模方法研究
2019-04-19 06:05:00劉金龍周陽陽吳海晶張青峰
中國水土保持 2019年4期
劉金龍,周陽陽,吳海晶,張青峰
(西北農林科技大學 資源環境學院,陜西 楊凌712100)
微地形的空間復雜性和不確定性決定了其測量方法的多樣性。目前,微地形測量的主要方法有接觸式(如測針法、鏈條法)和非接觸式(如激光掃描法、近景攝影測量法)兩大類[10-11]。接觸式測量方法可能會對地表造成破壞,從而影響測量結果。非接觸式測量方法雖能改善這個問題,但激光掃描法和近景攝影測量法受測量角度的限制,存在一定的盲區,不能真實完整地反映微地形特征。傾斜攝影測量(TPM, Tilt Photo-graphy Measurement)是采用光學攝影的方式,采集影像并完成對被攝物體信息(包括大小、形狀、特性、位置等方面的信息)的獲取,實現對真實場景的重建[12],然而該技術目前主要用于對較大范圍地物的觀測[13-15],鮮有應用于微地形觀測的報道,且在面積較小的情況下,如何采用人工方式進行觀測以節約成本,仍需要深入進行研究。為此,本研究在黃土坡面微地形條件下采用人工方式應用ATPM技術進行了探索性研究。
1 試驗設計
本試驗在陜西省楊凌區一塊平坦的農耕地上進行。楊凌區位于黃土高原南緣(E108.72°、N34.36°),屬溫帶半濕潤大陸性季風氣候區,年均降水量約637.6 mm。坡耕地土壤為灰棕色塿土,土體較疏松,土壤顆粒以粉砂為主(砂粒占2.82%、粉粒占55.74%、黏粒占41.44%),容重為1.30 g/cm3,含水率為10%。
試驗選用3種規格的鐵皮框,分別為30 cm×30 cm×10 cm(長×寬×高)、60 cm×60 cm×10 cm、100 cm×100 cm×10 cm。將鐵皮框輕嵌入地表并使其保持水平,同時地表凸起部分不得高于鐵皮框頂部。4個角點作為控制點,其中左下角點定義為坐標原點,原點與相鄰的控制點所在的邊框分別定義為x、y軸,并在鐵皮框內的試驗區S形選擇7個樣點作為標注點,如圖1所示。

圖1 試驗區示意

2 研究方法
2.1 相機檢校
普通數碼相機是非量測相機,由于內方位元素未知,不夠穩定或不能重復撥定,或時有變化,因而不能進行像位的解析計算,需要對相機內參數進行檢校,即求解相機內方位元素(主距與像主點位置) 與多種畸變參數。因此,將數碼相機應用于攝影測量時需進行相機檢校[16]。檢校參數見表1。
像點最大畸變在限值范圍內,故本相機完全滿足影像獲取的精度和可靠性要求。

表1 尼康D90數碼相機檢校參數
2.2 微地形三維模型構建
利用Smart3DCapture4.0軟件分別對試驗獲取的地表影像進行處理,最終完成微地形三維模型的構建。具體技術流程為:①通過空中三角測量計算,對原始影像進行特征提取,即對影像中同名點的圖像信息進行不同角度的匹配,以確定不同影像之間的關系,并獲得一個粗糙的三維地表模型;②通過設置比例因子,將①中解算出的控制點間距修改為實際距離(單位設置為cm),得到與實際地表比例一致但缺少統一坐標系的立體模型;③導入控制點坐標,添加三維坐標軸,在模型上刺點(人工修正導入控制點位置),確保模型上控制點與導入的控制點位置一致;④再次進行空三加密解算(即根據若干均勻分布于區域內的控制點,運用立體測圖技術,計算得到匹配加密點的高程和平面位置[17]),得到統一坐標系下1∶1高精度微地形三維模型,同時包含紋理、點云數據、正射影像和數字地形模型。
又聽到了吸鼻子和咳嗽的聲音,離他不到二十尺遠的兩塊巖石之間,他隱約看到一只灰狼的頭。那雙尖耳朵并不像別的狼那樣豎得筆挺;它的眼睛昏暗無光,布滿血絲;腦袋好像無力地、苦惱地耷拉著。這個畜生不斷地在太陽光里霎眼。正當他瞧著它的時候,它又發出了吸鼻子和咳嗽的聲音。
2.3 精度評價
通過對標注點實測坐標值與其解算坐標值進行比較,評價標注點坐標(x,y,z)的精度,進而完成對模型的精度評價;由數字地面模型和正射影像計算得到試驗區表面體積,與實測表面體積數據進行對比分析,以對整個微地形模型進行高程精度評價。
用中誤差來衡量觀測精度的高低,它是觀測值與真值偏差的平方和觀測次數n比值的平方根。中誤差越小,表示測量精度越高。
3 結果分析
3.1 控制點可靠性分析與微地形三維模型
空三加密中通過加入控制點坐標進行二次運算,可達到更正模型所有點坐標的目的。由于過程中包含平差運算,因此空三加密完成后控制點坐標也會發生改變,而控制點坐標的可靠性是定量描述微地形模型的前提,所以有必要分析控制點的可靠性。每種規格微地形單次試驗4個控制點,3種規格各重復3次,共計36個控制點的坐標數據。經統計分析,x、y、z坐標的誤差分別為-0.14、0.05、-0.12 mm,這說明控制點的相對位置基本上保持不變。控制點坐標的穩定保證了坐標軸的可靠性,為空間各點的三維坐標的準確性提供了先決條件。以100 cm×100 cm試驗區為例,所生成的1∶1微地形三維模型紋理、點云數據、正射影像和數字地形模型見圖2。可以看出,試驗區微地形模型中空間各點的位置完全符合自然狀態下的地表特征,且具有明顯的地表細微特征。
3.2 微地形三維模型精度評價
微地形模型精度評價包括平面精度評價和高程精度評價兩個方面。
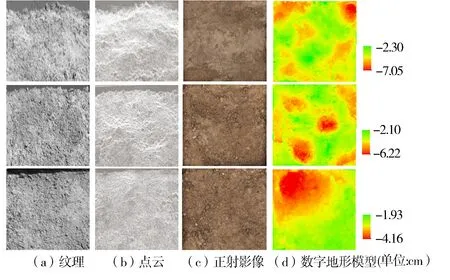
圖2 試驗成果(100 cm×100 cm試驗區1∶1微地形三維模型)
3.2.1 平面精度評價
標注點的實測平面坐標與解算平面坐標及其統計數據見表2。
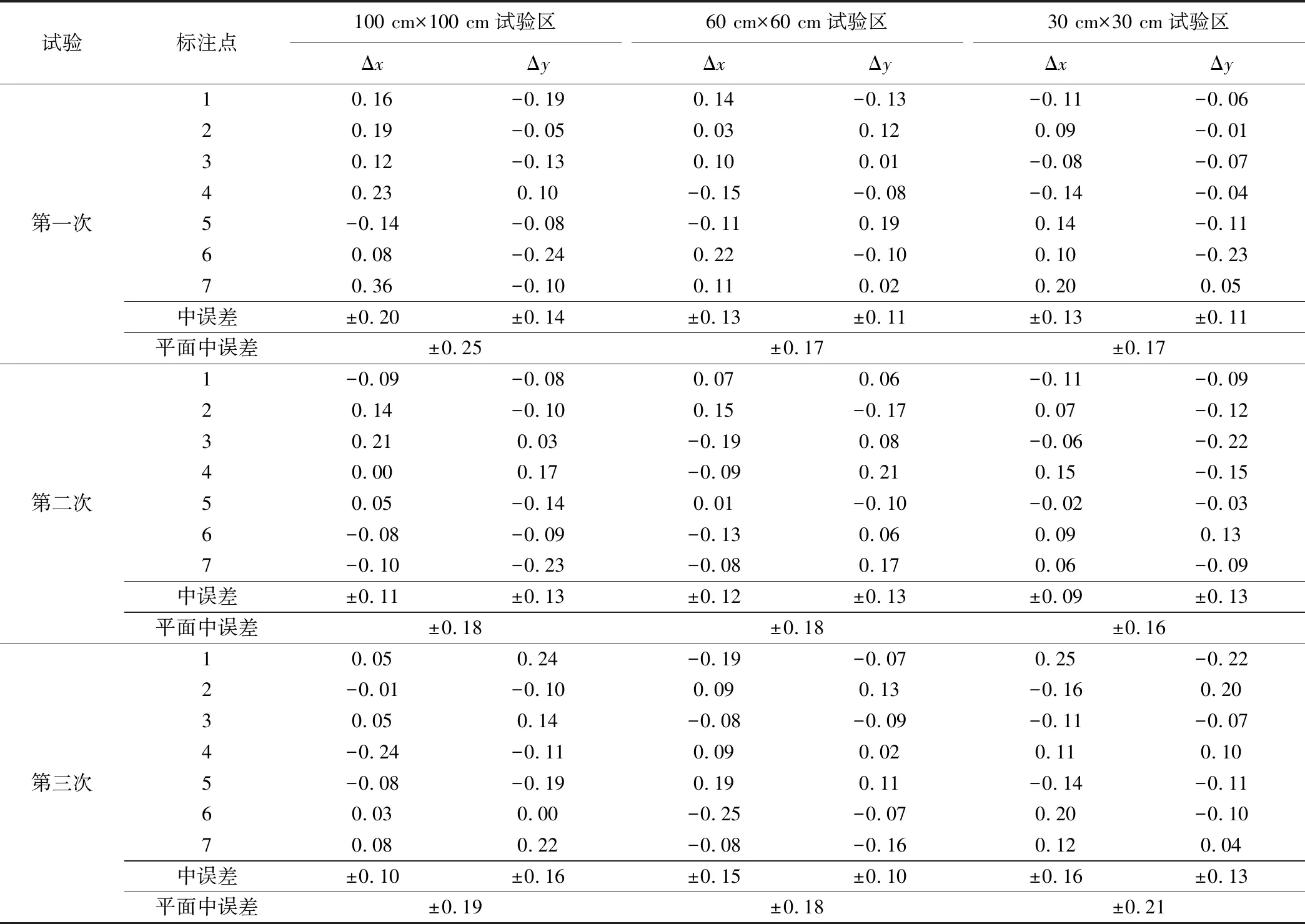
表2 標注點平面坐標對比 cm
注:Δx、Δy表示實測坐標與解算坐標的差值。
由表2可知,3個不同規格試驗區微地形三維模型的x、y方向上中誤差分別為±0.9~±2.0 mm和±1.0~±1.6 mm,平面中誤差在±1.6~±2.5 mm之間。將3次試驗數據統一進行分析,則x、y方向上中誤差分別為±1.4 mm和±1.3 mm,平面中誤差為±1.9 mm,達到了毫米級的精度。
3.2.2 高程精度評價
在土壤侵蝕的判定中, 對高程的測量精度要求高于平面精度。基于這一事實,本研究中對模型高程精度的評價,除了標注點高程精度評價,還根據微地形表面體積與面積的轉化公式求得相應的z值,以說明所有點高程的總體精度情況。實測表面體積可通過水體質量密度公式計算而得,模型表面體積可利用ArcGIS軟件中的ArcTools工具計算。
微地形表面以上z=0平面以下實測與解算體積及標注點高程統計數據見表3。
由表3可知,三種不同規格的微地形中,標注點的高程中誤差分別為±1.4~±3.2、±2.1~±3.3、±1.6~±3.2 mm,總體中誤差為±2.6 mm。根據實測表面體積與測算表面體積計算求得不同規格微地形高程,整體對比來看,二者高程誤差介于0.4~3.0 mm;且微地形表面以上z=0平面以下實測體積均略高于解算體積,這可能與水體壓實地表有一定的關系。
綜合來看,微地形三維模型的坐標可達到毫米級精度。基于人工傾斜攝影測量技術獲取黃土坡面微地形三維數值模型是可行的。本研究得到的1∶1微地形三維數值模型見圖3。
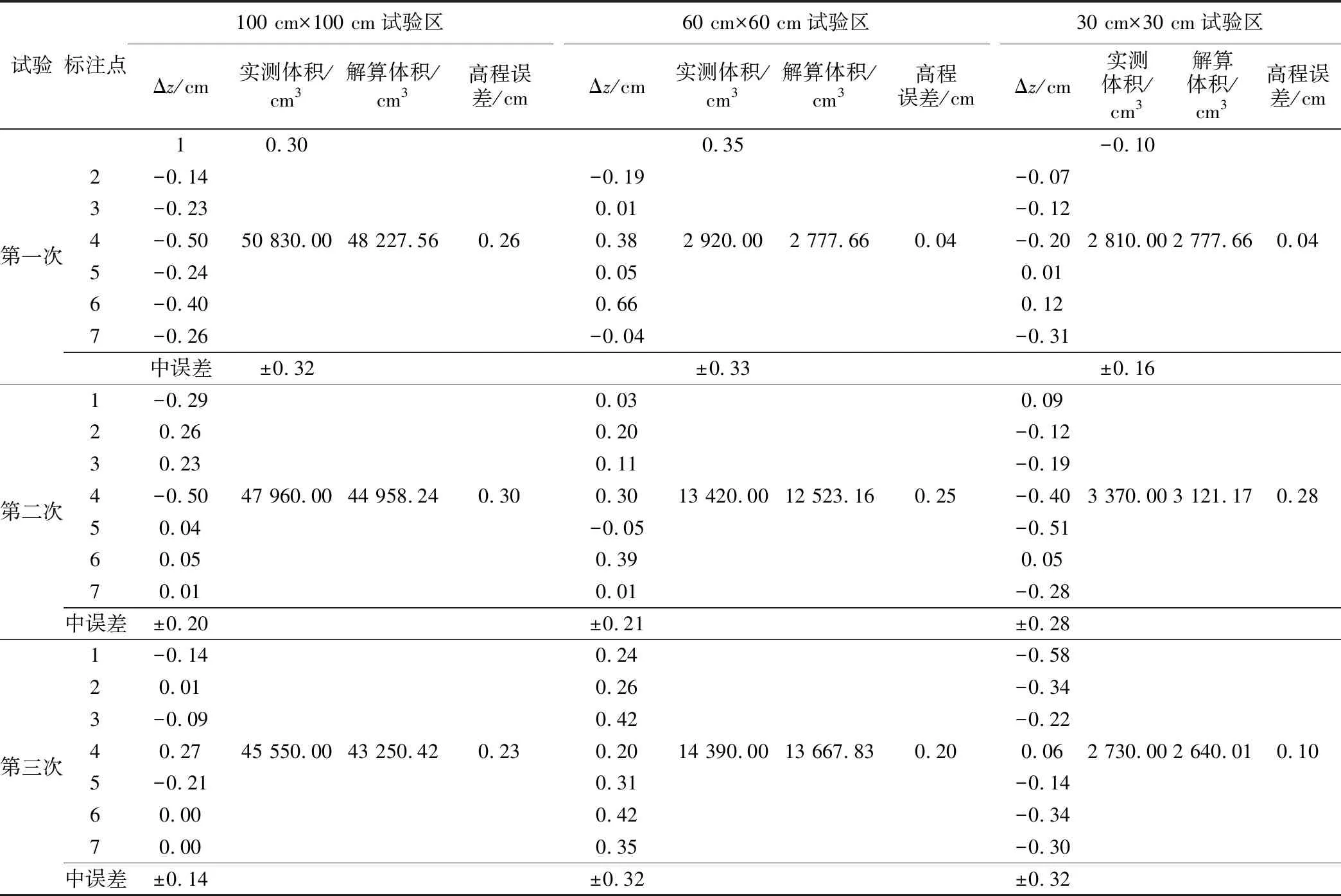
表3 高程精度評價
注:電子秤測量水體質量精度為10 g,故體積精度為10 cm3。以30 cm×30 cm試驗區為例,地表點高程精度為10/(30×30)=0.01 cm=0.1 mm。Δz表示實測坐標與解算坐標的差值。
4 結論與討論
本研究采用人工傾斜攝影測量方法獲取黃土坡面微地形高精度三維數值模型,通過標注點實測坐標數據與解算坐標數據之間的精度評價,以及實測表面體積與解算表面體積計算高程值之間的差異分析,綜合評價了三維模型的平面精度與高程精度。研究表明,采用人工傾斜攝影測量獲取微地形三維數值模型的方法是科學可行的,所獲得的1∶1微地形三維數值模型能很好地反映坡面的實際情況,達到了毫米級精度,可用于微地形的測量與大比例尺數字地圖的生產。
盡管我國目前已制定了國家測繪標準《1∶500、1∶1 000、1∶2 000 地形圖航空攝影測量內業規范》(GB/T 7930—2008),但隨著生產實踐對測量精準化要求的不斷提高,大于1∶500比例尺的地圖生產也勢在必行。根據本研究的成果,1∶1比例尺微地形平面中誤差應不超過±2.5 mm,高程中誤差應不超過±3.3 mm,可作為1∶1大比例尺精度的要求。然而本研究只是用了固定分辨率、固定拍攝距離和拍攝方式來獲取地表影像,關于選用不同分辨率的數碼相機或采取不同的拍攝距離或改變拍攝方式會對生成的三維數值模型精度有何影響,仍有待于深入探討與研究。

(a)100 cm×100 cm
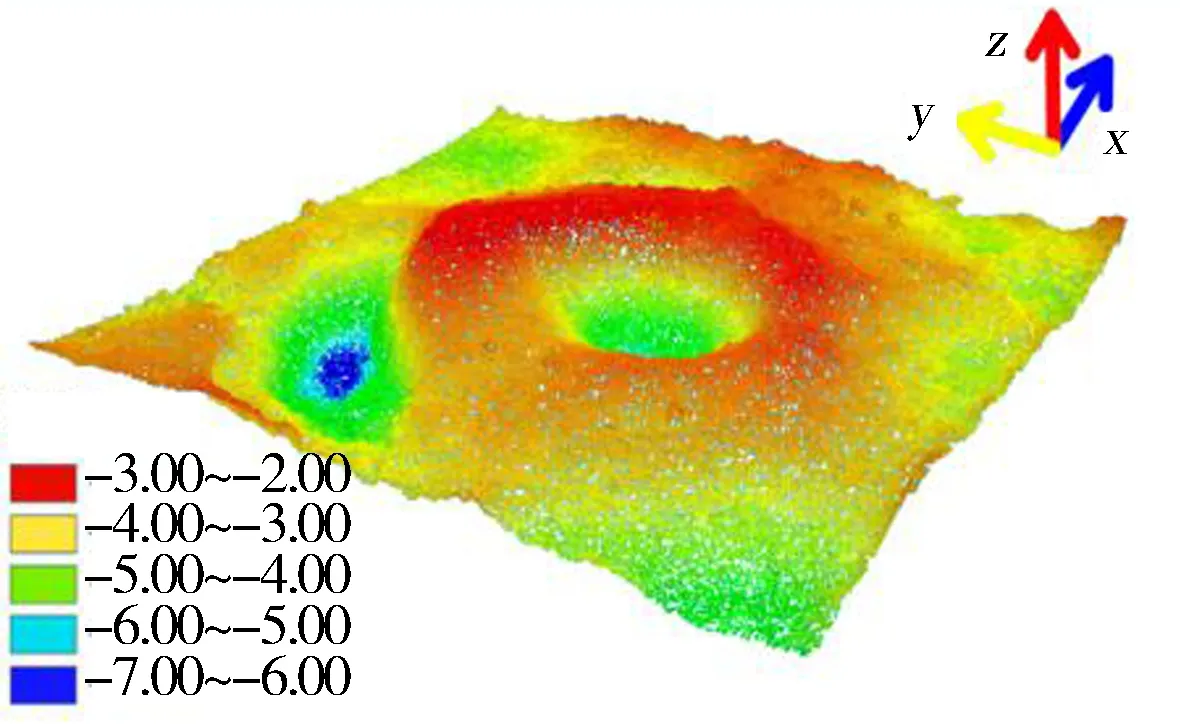
(b)60 cm×60 cm
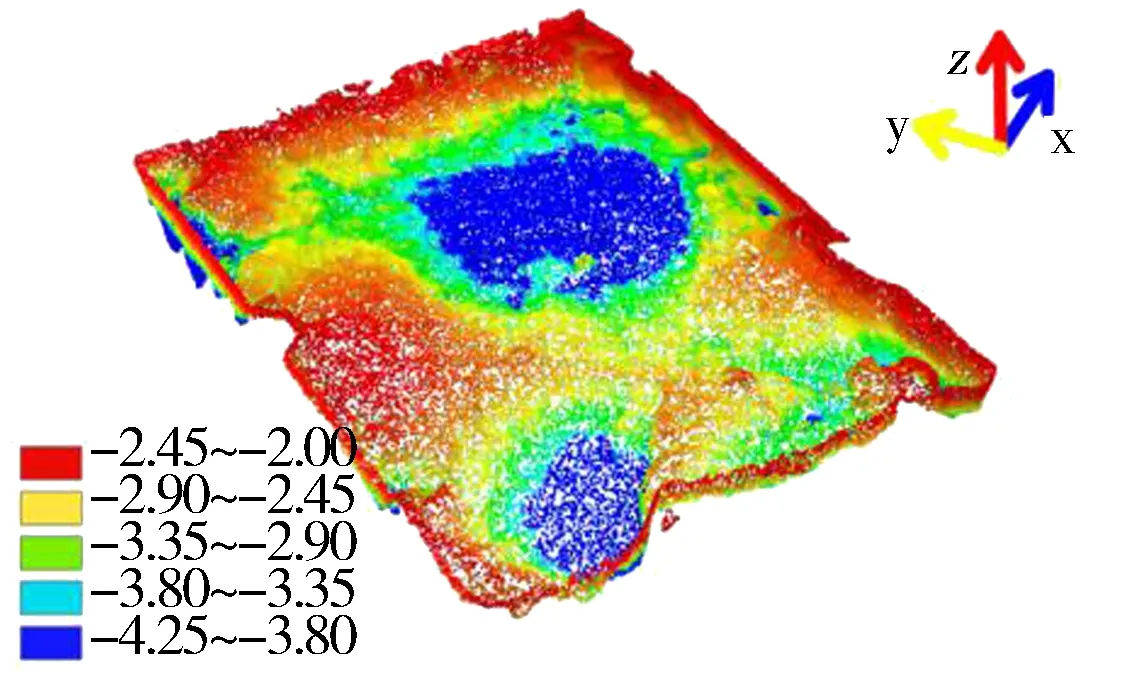
(c)30 cm×30 cm
由于本研究采用了人工替代無人機的方式,可以快速采集地表的影像數據,實現接近真實的1∶1大比例尺三維模型,節省了購買無人機的費用且無需考慮其續航時間問題,極大地減少了三維建模的成本,因此在微地形條件下的三維建模及地物變化(變形)監測方面具有廣泛的應用前景。
(致謝:感謝學習室各位同門在本文撰寫過程中予以的大量幫助,也感謝各位舍友在試驗中的鼎力相助。)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油瀝青(2021年4期)2021-10-14 08:50:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
