尖側緣機身布局的俯仰力矩特性及擾流板控制
2019-04-22 10:44:48李乾董超齊中陽王延奎
航空學報 2019年4期
李乾,董超,齊中陽,王延奎,*
1. 北京航空航天大學 航空科學與工程學院,北京 100083 2. 北京航天長征飛行器研究所,北京 100076
不同于圓形或橢圓形截面形狀的常規機身,截面形狀帶尖側緣的機身,具有提高升力[1-5],推遲機翼失速[6-8],提高大迎角下橫向穩定性和降低雷達散射面積[9-12]等優點。因此,新型戰斗機普遍采用尖側緣機身,如美國F-22、F-35和俄羅斯T-50等。尖側緣機身繞流在側緣處發生分離,形成的旋渦結構與大后掠三角翼前緣渦類似[5]。在大迎角時,尖側緣機身可形成比常規機身更強的旋渦流動[2,4-8],進而誘導產生更強的法向力[1-3,9-10]。顯然,這種流動特點會影響尖側緣機身布局的氣動特性。單獨尖側緣機身具有一定的橫向穩定性,該橫向穩定性與機身上表面截面形狀有關[11-12];對于加機翼的布局,由于機身旋渦與機翼流動之間的有利誘導,布局橫向穩定性得到了增強,但縱向穩定性上存在一定程度的減弱[13-17]。研究表明[18-19],采用尖側緣機身的戰斗機,即使采用極限低頭舵偏,在大迎角時仍存在較大和較難控制的抬頭力矩,表現出很強的縱向靜不穩定性。但是,目前關于縱向靜不穩定研究多集中在常規機身布局,較少關注尖側緣機身布局,對其抬頭力矩產生原因及流動現象,文獻中并沒有較明確的解釋。
縱向靜不穩定性是新型戰斗機放寬靜穩定裕度設計思想的體現[20-21]。放寬要求有一定的邊界[21],并且采取有效的控制技術使其在大迎角下仍然可控。俯仰力矩的控制技術主要包括2類:一類是推力矢量噴管,另一類是常規氣動舵面。推力矢量噴管通過發動機推力提供偏轉分量來控制飛機姿態[22],技術實現難度大,不能過分依賴。實際中常采用常規氣動舵面,因此縱向氣動特性往往取決于飛機的氣動布局。正常式布局戰斗機可采取增大平尾面積,平尾外移和下反,也可采取機翼翼刀和機翼前緣襟翼下偏等來增強縱向靜穩定性[23]。鴨式布局戰斗機可通過調整鴨翼面積及站位來改善縱向氣動特性。但是,戰斗機大迎角下繞流結構復雜,常規氣動舵面常處在分離尾流中,控制效率降低,需要結合大迎角的流動特性,針對性地提出流動控制技術。
針對以上問題,本文設計了典型尖側緣機身布局模型,通過測力試驗,得到了俯仰力矩的迎角分區特性;在不同分區中,借助測壓和空間流場測量手段,揭示全機流動的演化規律;由于風洞試驗較難獲取不同部件對全機俯仰力矩的貢獻數據,本文結合計算流體力學(CFD)研究了不同部件對全機俯仰力矩的貢獻,找到了產生正俯仰力矩的主要部件和關鍵位置,研究了大迎角正俯仰力矩產生的主控流動;基于流動機理,提出大迎角機身擾流板控制技術,取得了較好的控制效果。
1 試驗模型與試驗方法
試驗模型由尖側緣機身、進氣道、邊條和中等后掠機翼構成,如圖1所示。機身截面形狀滿足拋物線方程,沿體軸采用融合設計,機身長900 mm,尖側緣機身參考寬度D=94 mm。進氣道位于機身兩側,進氣道為未通氣狀態。機翼為上單翼布置,翼展為680 mm。全機采用融合設計,機翼翼根與進氣道部位安裝邊條。模型縱向參考中心距飛機頭尖部570 mm。模型共有11個測壓截面,170個測壓孔。位于機身前體S1~S7截面,在迎風面和背風面均布置測壓孔;位于機翼S8~S11截面,只有背風面布置測壓孔。圖2給出了部分截面測壓孔的分布情況。為便于展示壓力分布曲線,規定背風側對稱面處為0,背風側各測壓點y軸坐標與當地截面最大半寬bsec之比y/bsec作為該測壓點橫坐標。各截面左右尖側緣(后視)為迎風側和背風側分界點分別為-1與+1。在迎風側,為保證整個壓力分布曲線的連續性,左側迎風側橫坐標采用-2-y/bsec,而右側迎風側橫坐標采用2-y/bsec,迎風側對稱面測壓點左(右)為-2(+2)。
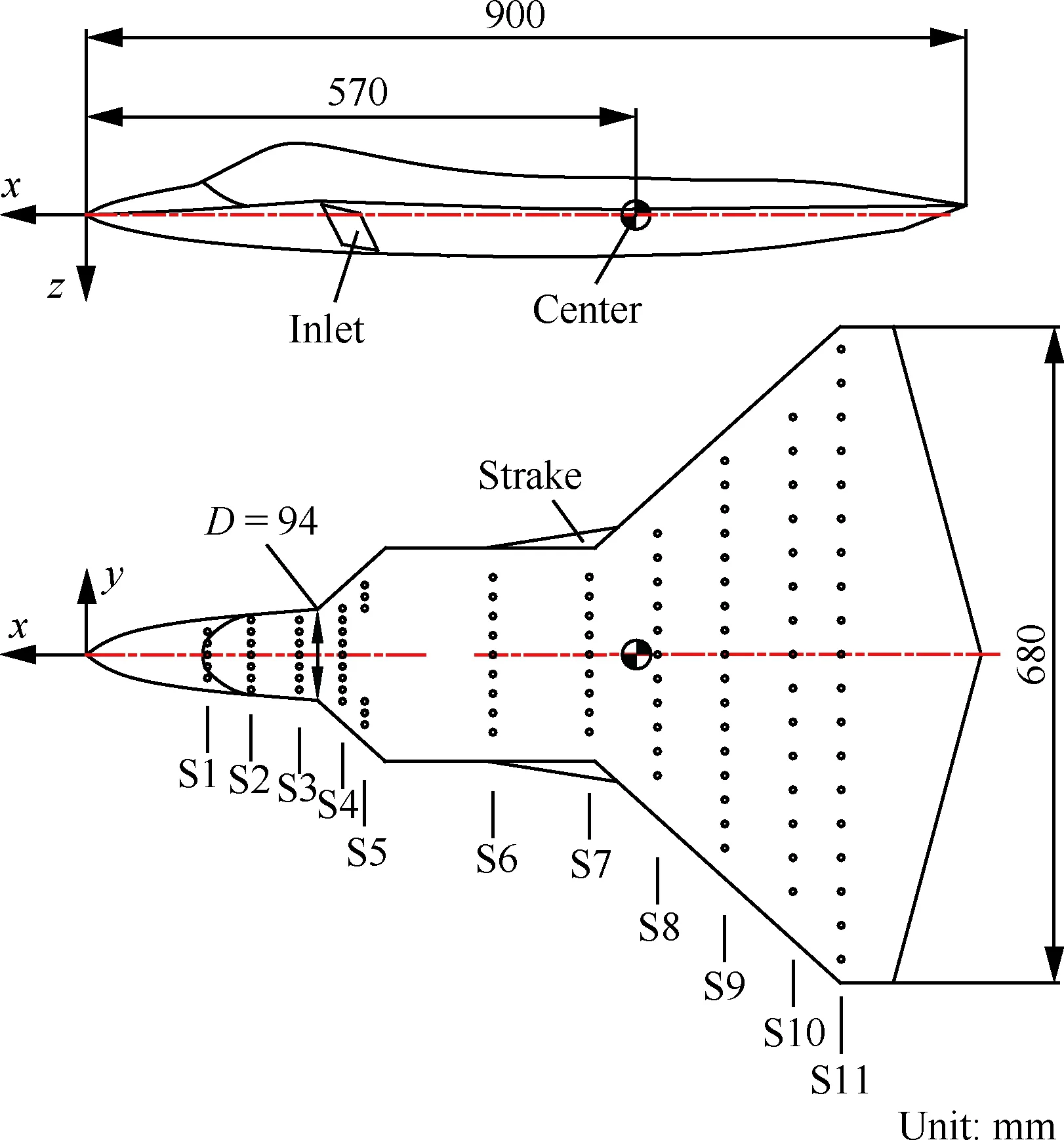
圖1 試驗模型Fig.1 Experimental model
試驗在北京航空航天大學D4低速風洞完成,來流湍流度為0.08%。采用開口試驗段,試驗段截面為1.5 m×1.5 m,長度為2.5 m。風速為40 m/s,迎角區間為0°~65°,基于尖側緣機身參考寬度的雷諾數ReD為2.59×105。
試驗方法包括測力、測壓和粒子圖像測速(Particle Image Velocimetry,PIV)試驗。靜態測力試驗的天平是內置式六分量天平,開風狀態下測力試驗基本流程為:模型到達指定迎角,待流場穩定后,測力系統以512 Hz采集各天平分量512個數據,然后分別取平均值作為該迎角各分量的開風測量數據。經過驗證,采集頻率512 Hz和采集512個數據點是合適的。7次重復試驗的俯仰力矩測量相對誤差為1.37%。測壓采用PSI9816壓力掃描閥系統,單通道量程為1 PSI=6 895 Pa,測量精度為±3 Pa。測壓試驗基本流程是:模型到達指定迎角,待流場穩定后,壓力掃描閥以50 Hz 采集各測壓孔100個靜壓值,再分別取平均值作為各測壓孔的靜壓值。按照多點等精度誤差估計,測壓相對誤差為0.25%。PIV試驗采用Dantec公司的Digital PIV系統。該系統由雙脈沖Nd:YAG激光器,跨幀相機,粒子發生器,同步盒和圖像處理卡組成。PIV試驗布置如圖3所示,示蹤粒子為食用油顆粒,拍攝截面垂直于模型體軸。PIV試驗基本流程為:在選定的拍攝截面,采集系統以最高頻率3.15 Hz拍攝100組圖像,每組包括用于互相關運算的2幅照片,2幅照片的拍攝時間差根據激光厚度和所拍攝截面法向速度設定。每組圖像先通過互相關運算得到速度矢量場和渦量場,再通過100組數據平均得到時均速度矢量場和時均渦量場作為該截面的PIV結果。相機像素為2 048 pixels×2 048 pixels,互相關運算的詢問區為32 pixels×32 pixels,重疊25%。模型前體視場大小為200 mm×200 mm,空間分辨率為2.35 mm;后體視場大小為560 mm×560 mm,空間分辨率為6.59 mm。
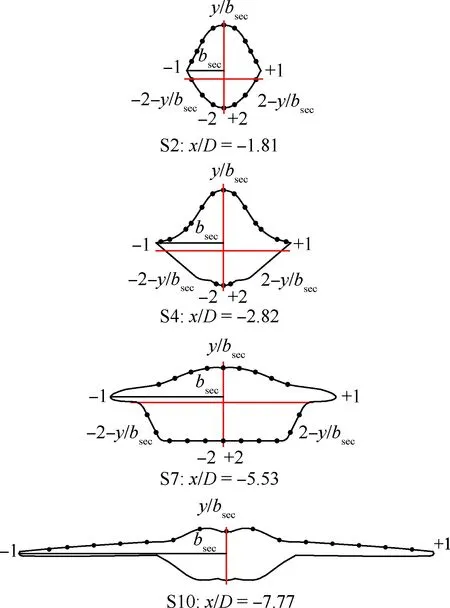
圖2 截面測壓孔分布Fig.2 Distribution of pressure taps
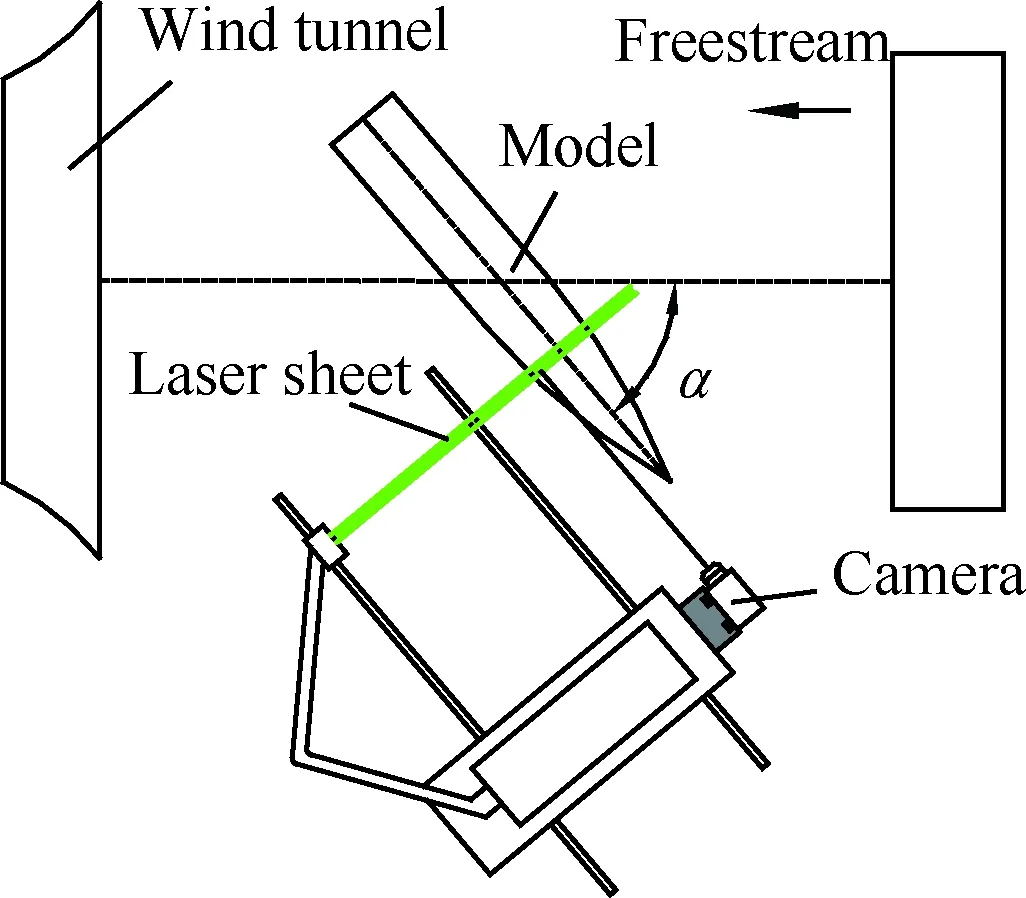
圖3 PIV試驗布置俯視圖Fig.3 Top view of PIV experiment setup
2 計算方法與驗證
計算采用Fluent商用軟件,利用有限體積法對控制方程進行離散化,耦合求解連續性方程、動量方程和能量方程,離散格式采用二階迎風格式,湍流模型采用Standardk-epsilon湍流模型,全機結構網格為400萬。計算結果驗證如圖4所示,升力系數CL和阻力系數CD基本吻合,當迎角大于50°時,計算得到的升力和阻力均比試驗值略大。總體上,計算結果基本滿足要求。
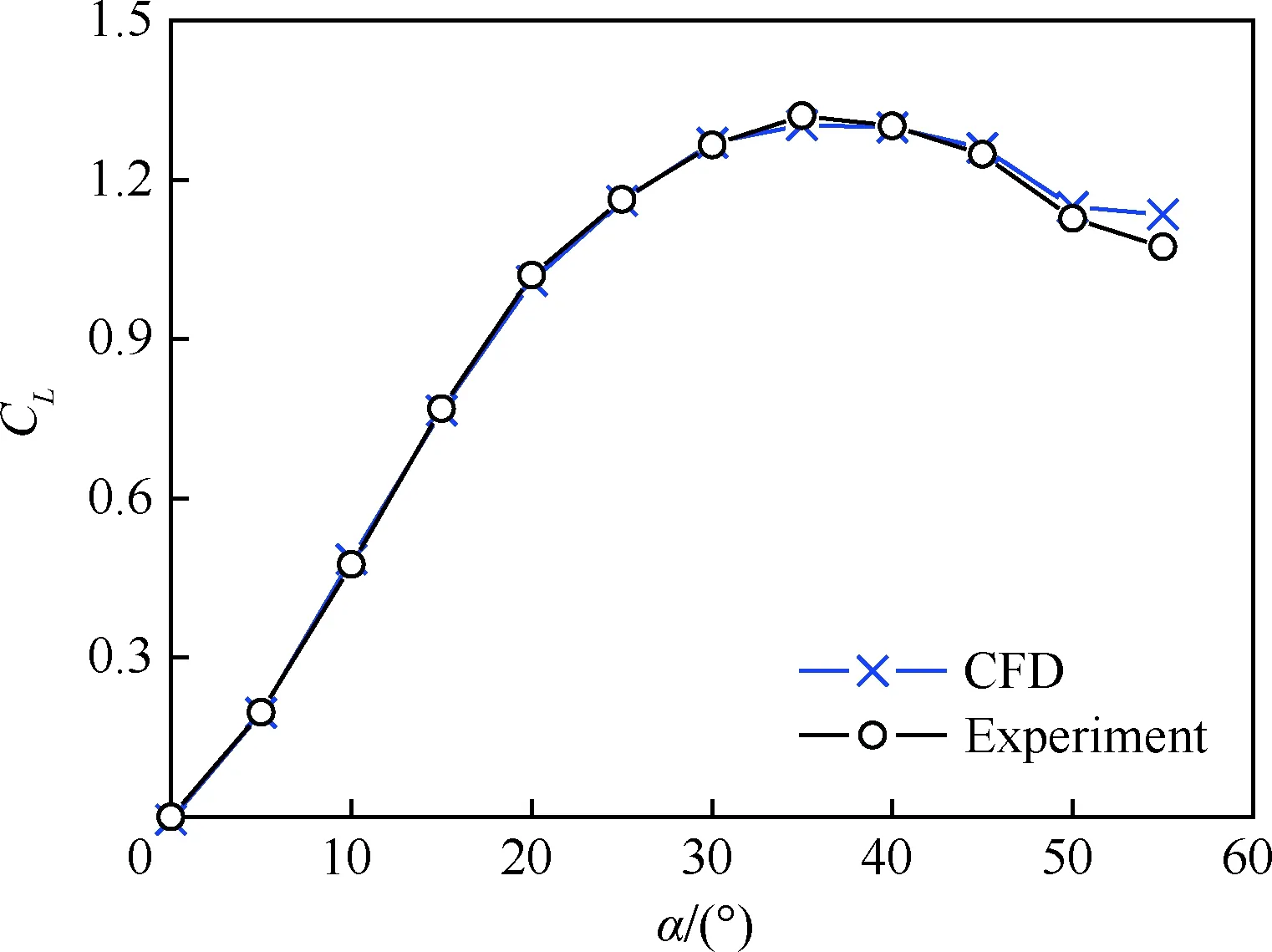
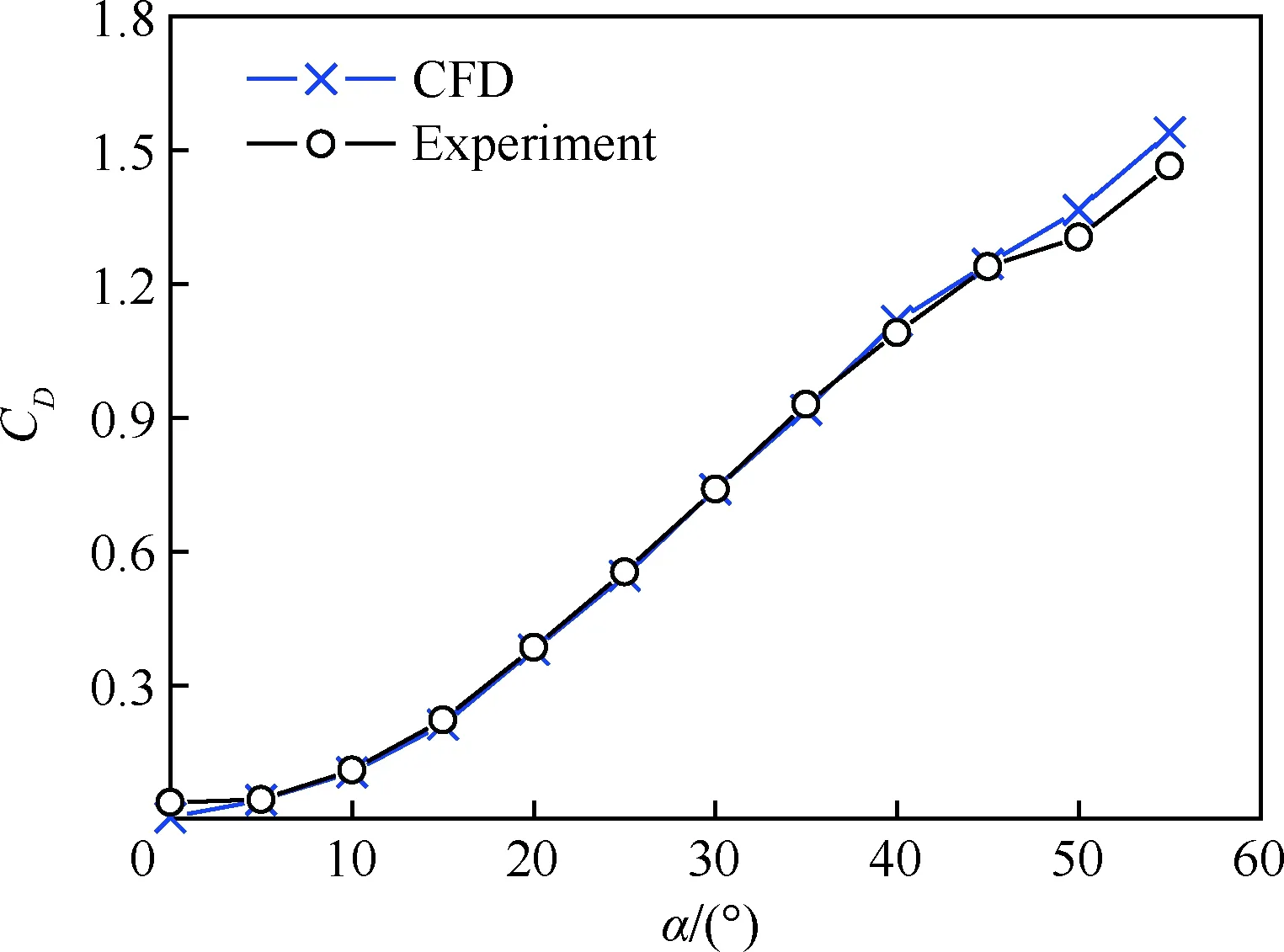
圖4 CFD結果驗證Fig.4 Validation of CFD results
3 結果與分析
3.1 俯仰力矩的迎角分區特性及流動演化規律

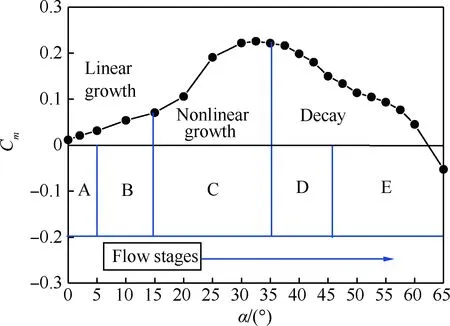
圖5 Cm隨迎角的變化及流動分區(試驗)Fig.5 Variation of Cm with angles of attack and flow stages (Experiment)
3.1.1 線性增長區

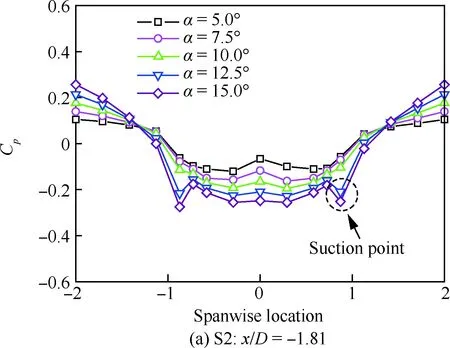
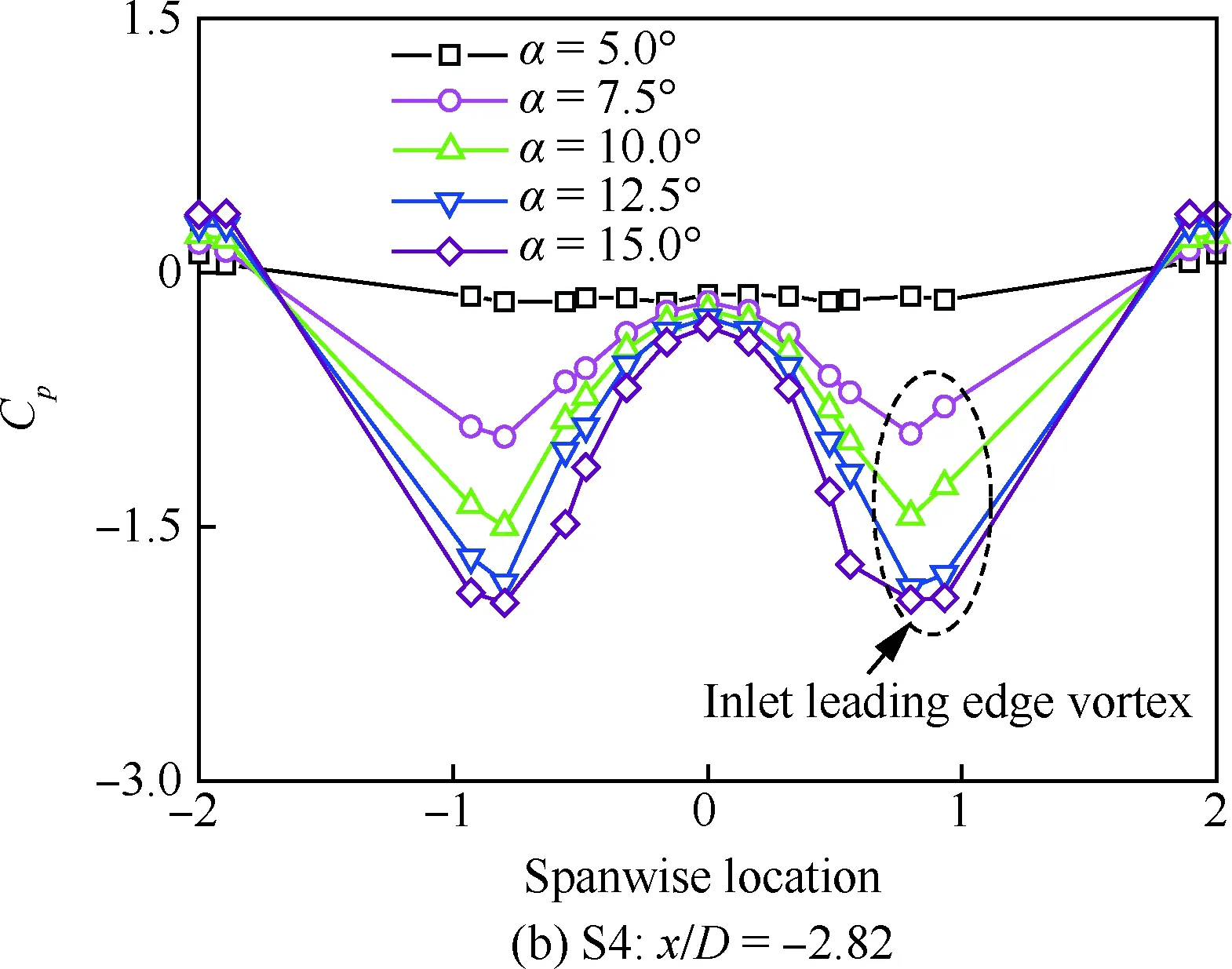
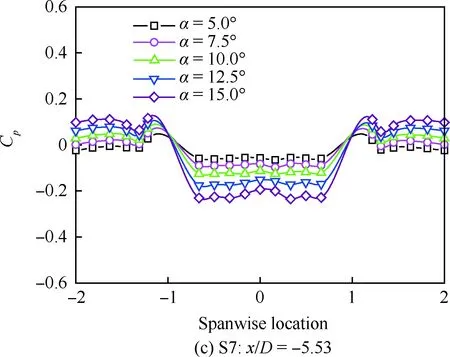
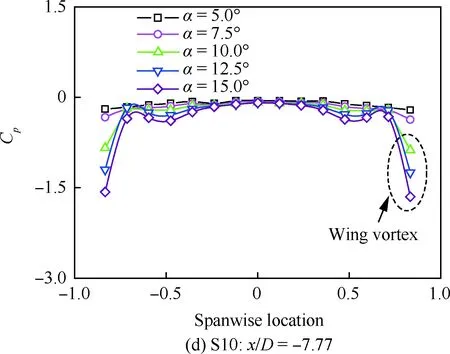
圖6 截面壓力系數分布(α=0°~15°,試驗)Fig.6 Distributions of sectional pressure coefficients (α=0°-15°, Experiment)
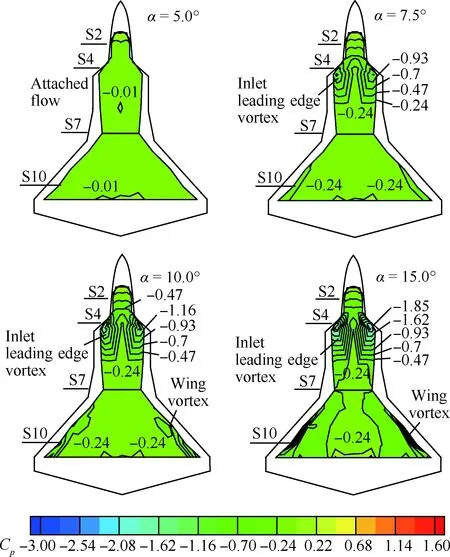
圖7 背風側壓力系數云圖(α=0°~15°,試驗)Fig.7 Contours of pressure coefficients (α=0°-15°, Experiment)
當α≤ 5.0°時(即圖5中A區),背風側流動為附著流。當α= 7.5°~15.0°時(即圖5中B區),進氣道前緣渦和機翼渦開始形成。進氣道前緣渦和機翼渦處在發展壯大階段,分別位于參考中心前后,兩者共同作用下使俯仰力矩基本保持線性增加。
3.1.2 非線性增長區
當α=17.5°~32.5°時,Cm呈現非線性增長。背風側流動可分為機身前體流動和機翼流動。圖8為α=17.5°~32.5°時機身前體S2、S4、邊條S7和機翼S10截面的壓力系數分布隨迎角的變化曲線。
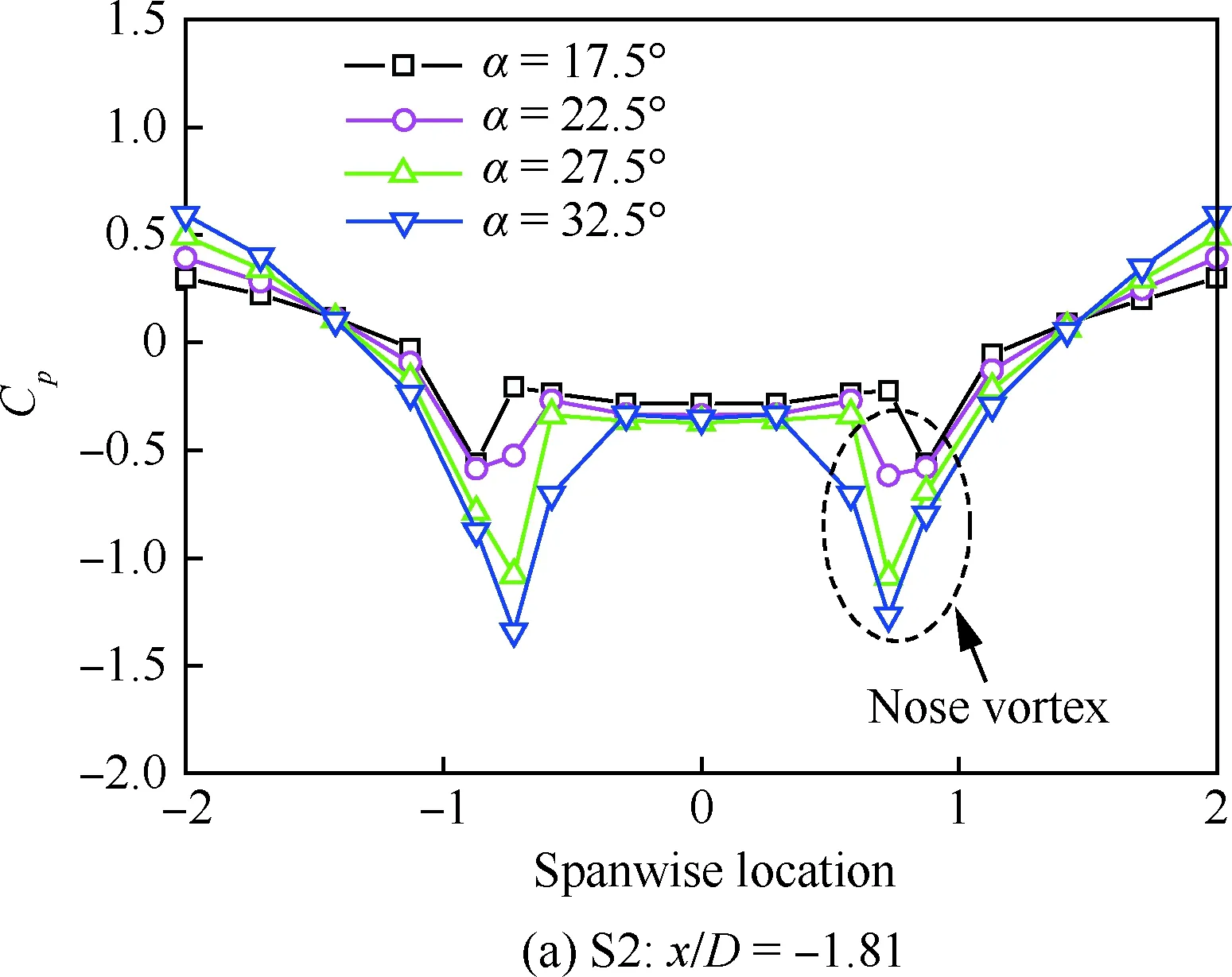
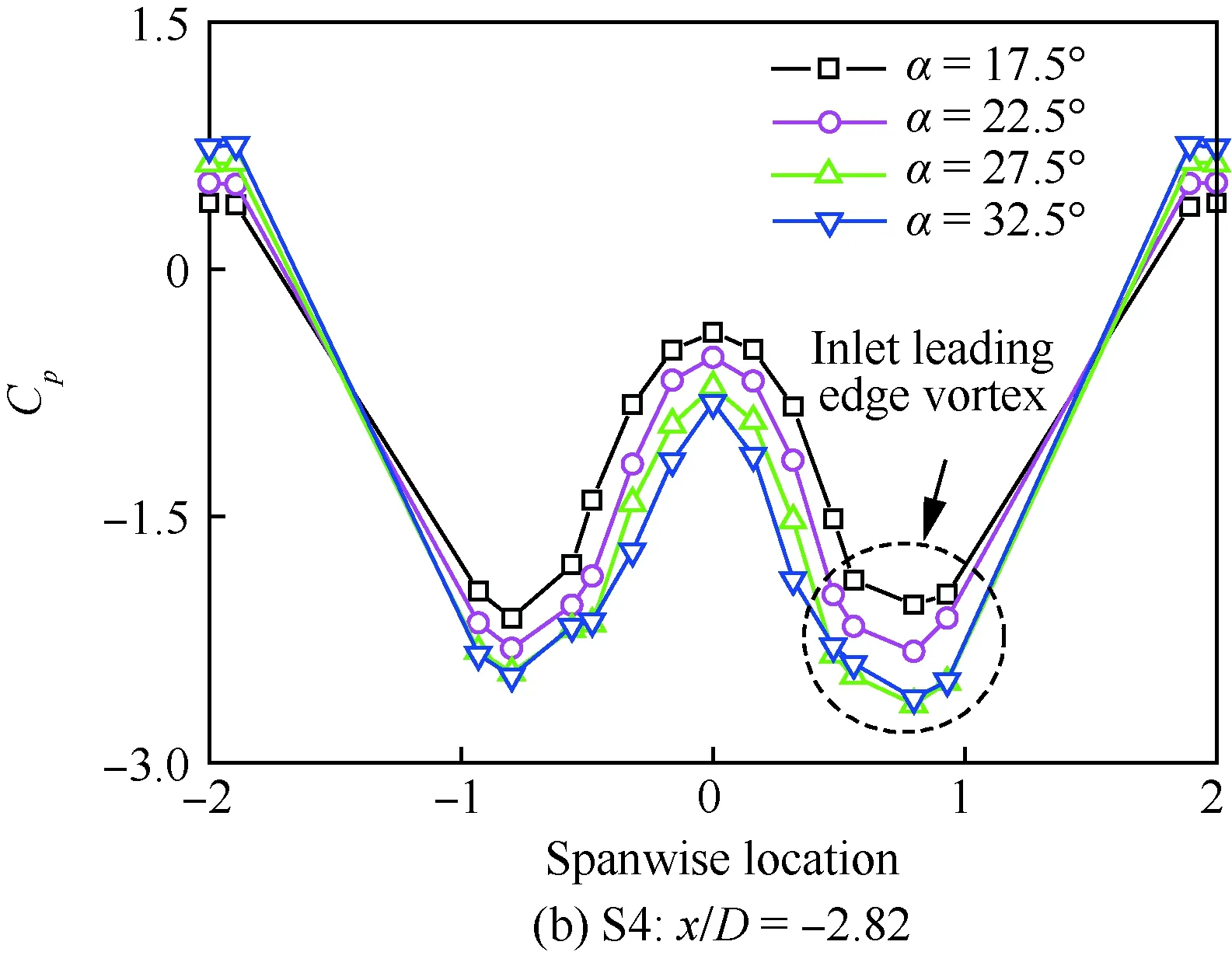
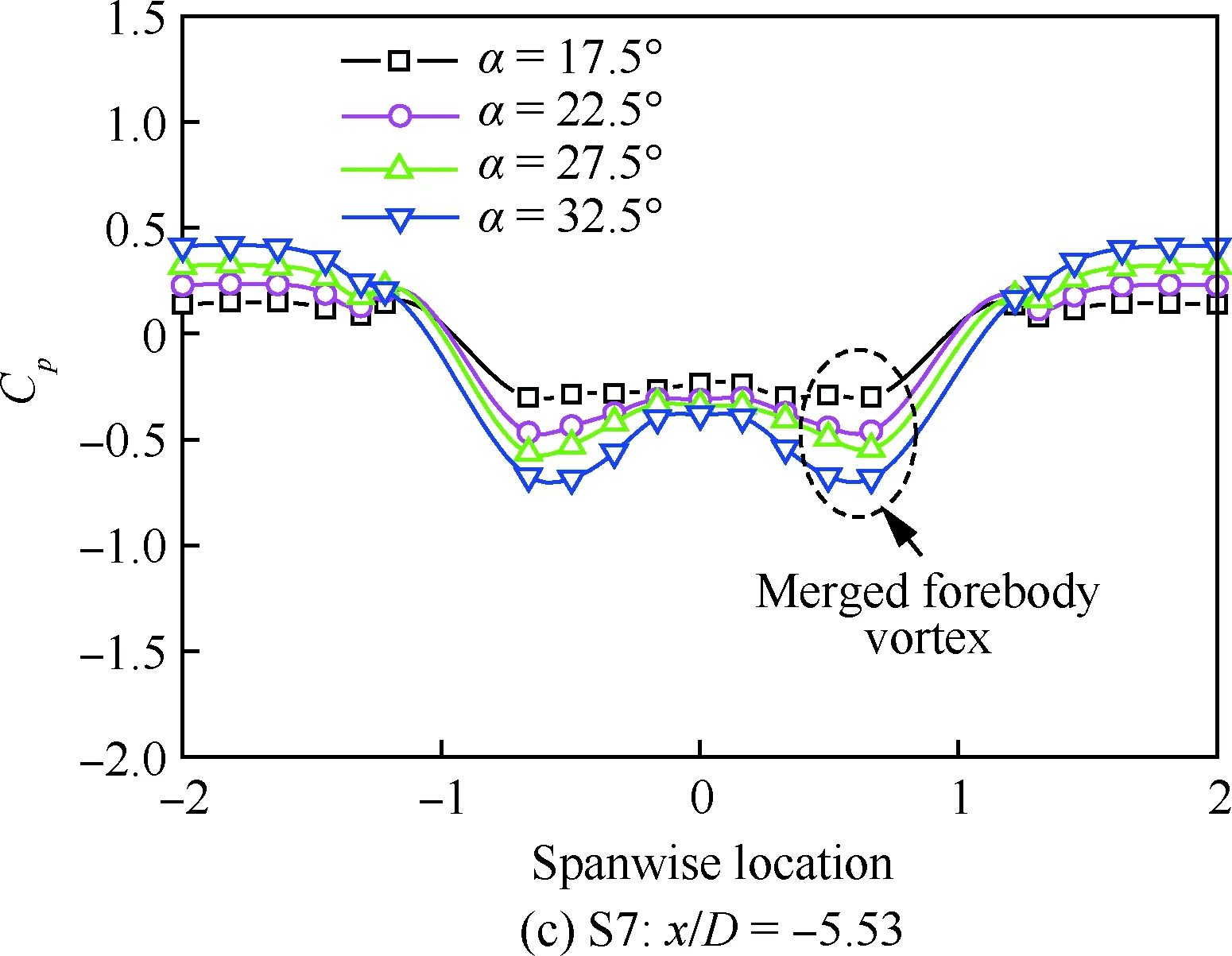
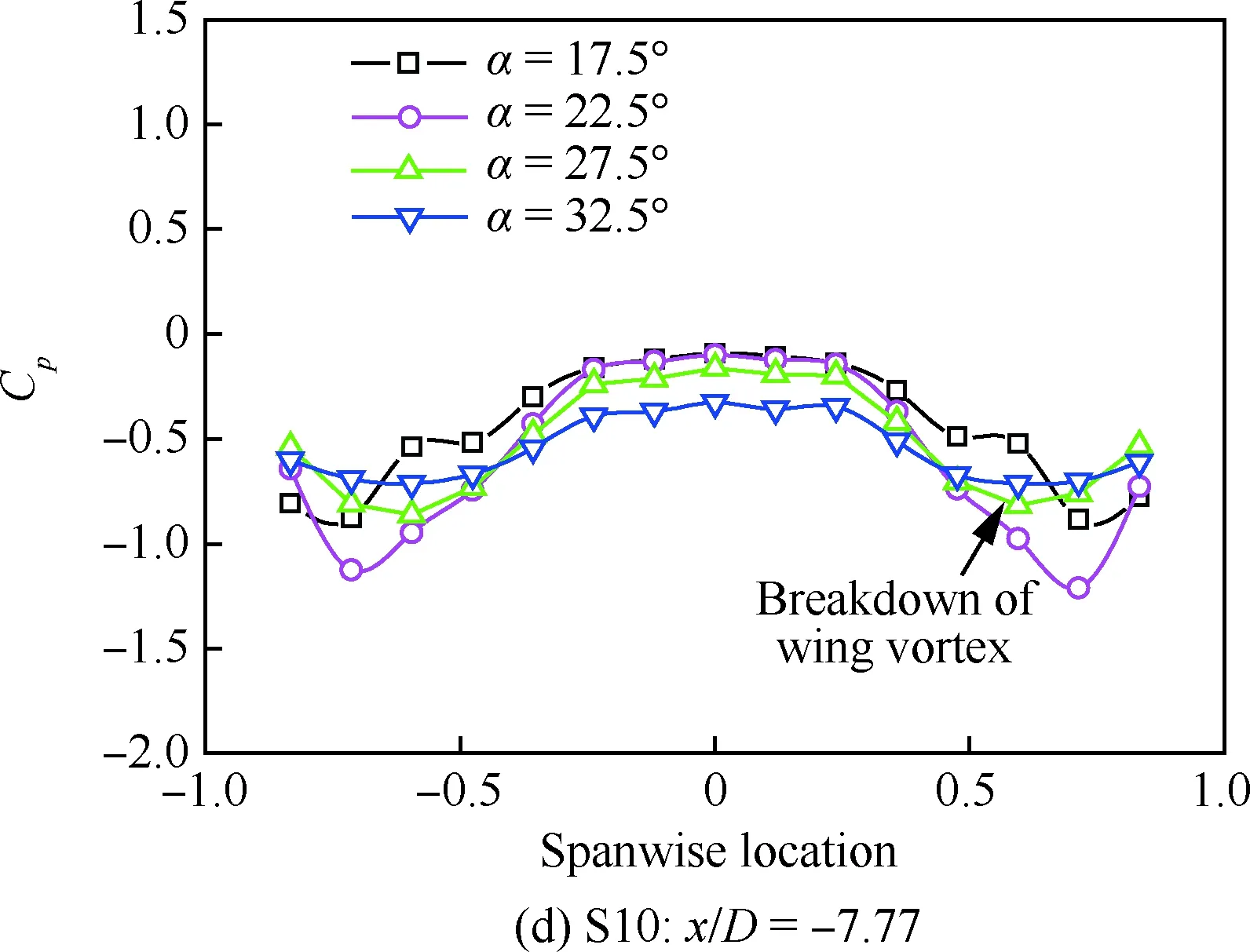
圖8 截面壓力系數分布(α=17.5°~32.5°,試驗)Fig.8 Distributions of sectional pressure coefficients (α=17.5°-32.5°,Experiment)
對于機身前體流動,當α= 17.5°時,S2截面壓力分布出現較強的吸力峰,形成較大尺度的機頭渦。隨迎角增加,該吸力峰值不斷變大并向內移動,說明機頭渦不斷增強,并向模型對稱面移動。與圖6相比,進氣道S4截面壓力分布吸力峰值持續增大,在α=27.5°達到最大,在α=32.5°時吸力峰值不變,此時進氣道前緣渦最強。邊條S7截面壓力分布在迎角大于17.5°時也開始出現吸力峰值。圖9給出了α=30.0°時機身前體背風側渦系結構。無量綱渦量ω*=ωxD/V∞,ωx為PIV試驗測得的渦量。可看出,S2截面出現了清晰的機頭渦,機頭渦沿軸向發展渦位逐漸向模型對稱面移動。S4截面除機頭渦外,還存在進氣道前緣渦。沿軸向發展,同側的機頭渦和進氣道前緣渦逐漸卷繞并融合,S7截面僅存在一對尺度較大的融合前體渦,產生了S7截面的吸力峰。
對于機翼流動,S10截面壓力分布的吸力峰值在α=22.5°時最大,之后開始減小,說明機翼渦強度在增強后減弱。圖10給出α=17.5°、22.5°、27.5° 和32.5°的機翼背風側壓力系數云圖。可知,機翼前緣低壓區在α= 22.5°時面積最大,之后縮小且低壓值減小。因此,當α=22.5°~32.5°時,機翼渦進入衰減發展階段。在α=32.5°時壓力分布基本變平坦,說明在S10截面機翼渦已經破裂,但在S10截面之前仍存在低壓區。
在α=17.5°~32.5°時(即圖5中C區),機頭渦出現,進氣道前緣渦充分發展,機翼渦充分發展后開始破裂。雖然進氣道前緣和機翼前緣后掠角相同,但兩處旋渦破裂起始迎角明顯不同,進氣道前緣渦為32.5°,而機翼前緣渦為22.5°,這是由于機頭渦靠近進氣道前緣,對進氣道前緣渦產生了有利誘導,推遲了進氣道前緣渦的破裂。在該區域,不斷增強的機頭渦和進氣道前緣渦與先增強后衰減的機翼渦使得該區域俯仰力矩呈現非線性增長趨勢。
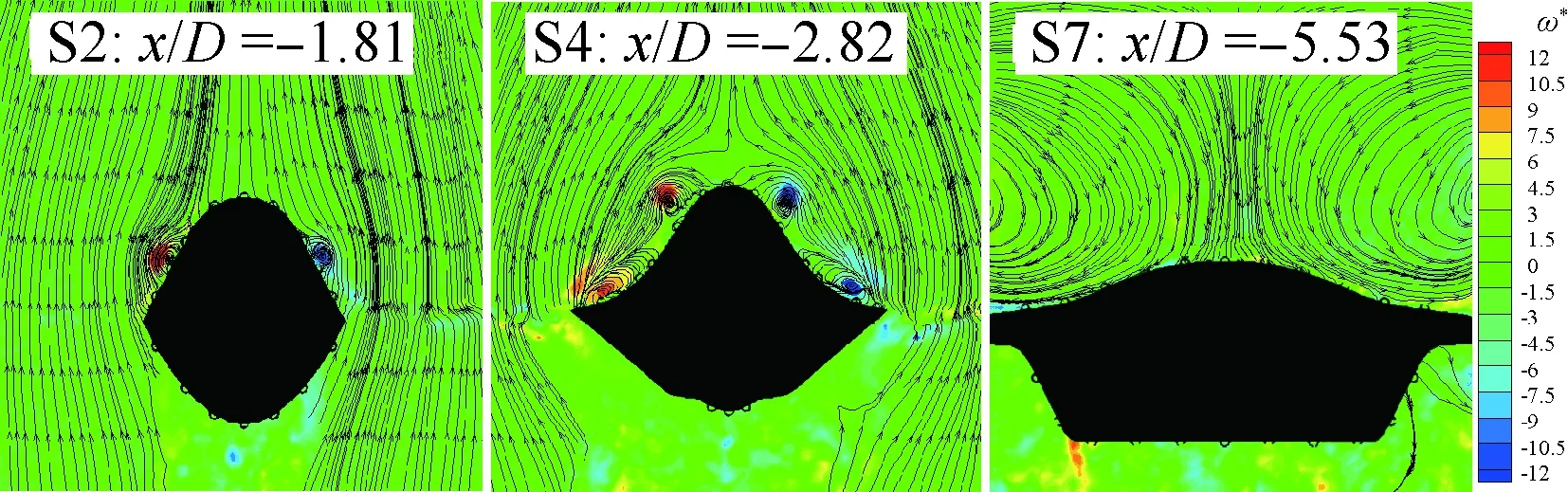
圖9 α=30.0°時機身渦量及流線圖(后視,試驗)Fig.9 Vorticity contours and streamlines over forebody at α=30.0° (rear view, Experiment)
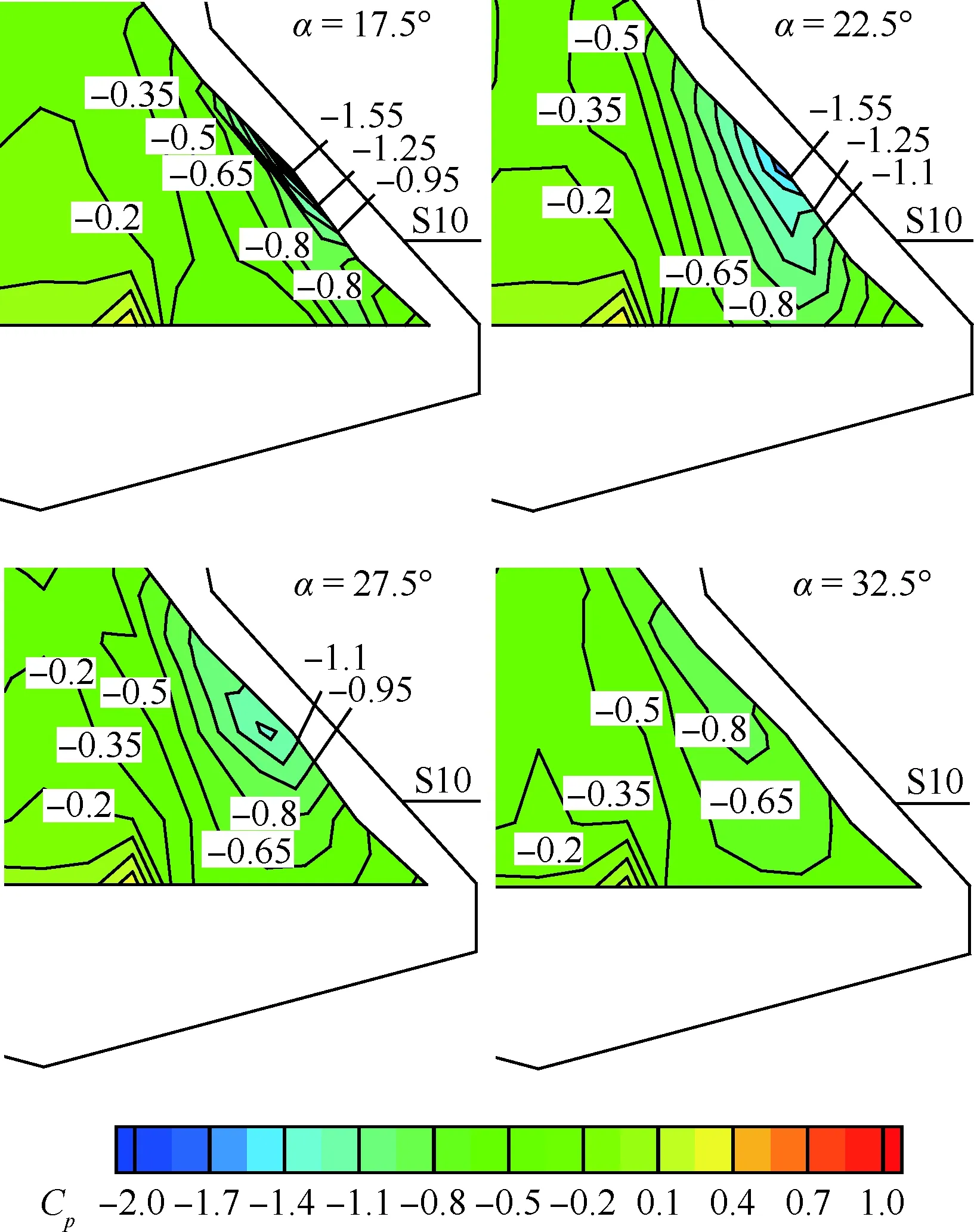
圖10 機翼壓力系數云圖(α=17.5°~32.5°,試驗)Fig.10 Contours of pressure coefficients over the wing (α=17.5°-32.5°, Experiment)
3.1.3 衰減區
當α= 35°~65°時,Cm呈現衰減趨勢。對機身前體流動,S3截面位于機頭最靠后的位置。圖11 為S3和S4截面空間流場隨迎角的變化規律。圖12為S3和S4截面壓力系數分布隨迎角的變化規律。
當α= 35°~ 42.5°時,S3截面機頭渦展向渦位移向模型對稱面,隨迎角變化位置保持不變,渦量增加。S3截面壓力分布吸力峰位置基本不變,幅值增加。當α= 42.5°,S3截面機頭渦吸力峰值最大,此時機頭渦最強。機頭渦發展到S4,其誘導的吸力峰隨迎角增加也在增強,機頭渦處在發展壯大中;但是,由于機頭渦位置遠離進氣道前緣,對進氣道前緣渦的有利誘導減弱,S4處的進氣道前緣渦隨迎角增加渦核擴散,渦量減小。S4截面由進氣道前緣渦誘導產生的吸力峰不斷減少,進氣道前緣渦處在破裂中。
圖13為α= 42.5°和47.5°時機身前體背風側壓力云圖。當α= 47.5°時,機頭渦渦位靠近縱向對稱面,渦量減小,S3截面壓力分布吸力峰也移向對稱面,吸力峰值減小,說明此時機頭渦進入衰減。
圖11 S3和S4截面渦量及流線圖(α= 32.5°~47.5°,后視,試驗)Fig.11 Vorticity contours and streamlines of S3 and S4 sections (α=32.5°-47.5°, rear view, Experiment)
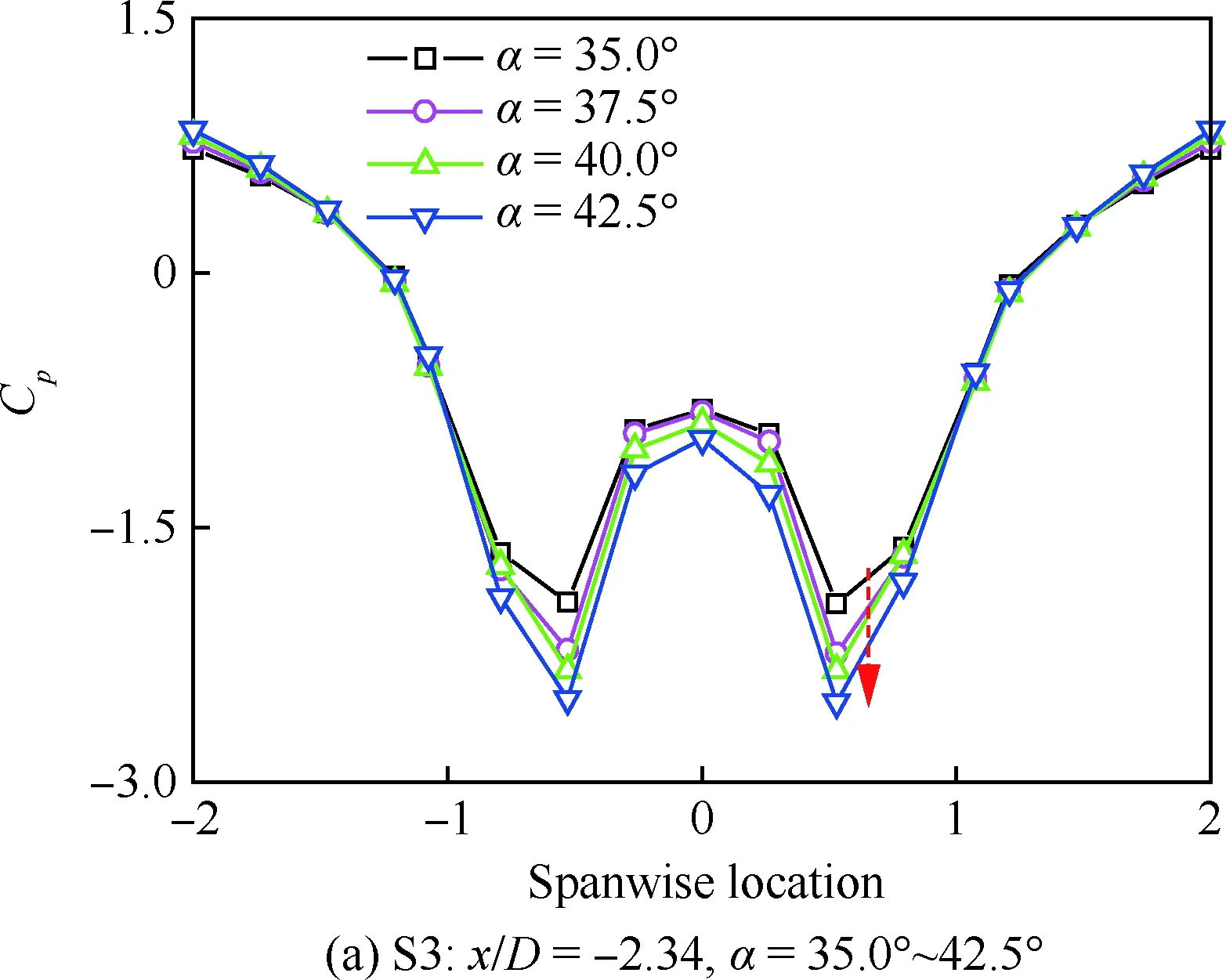
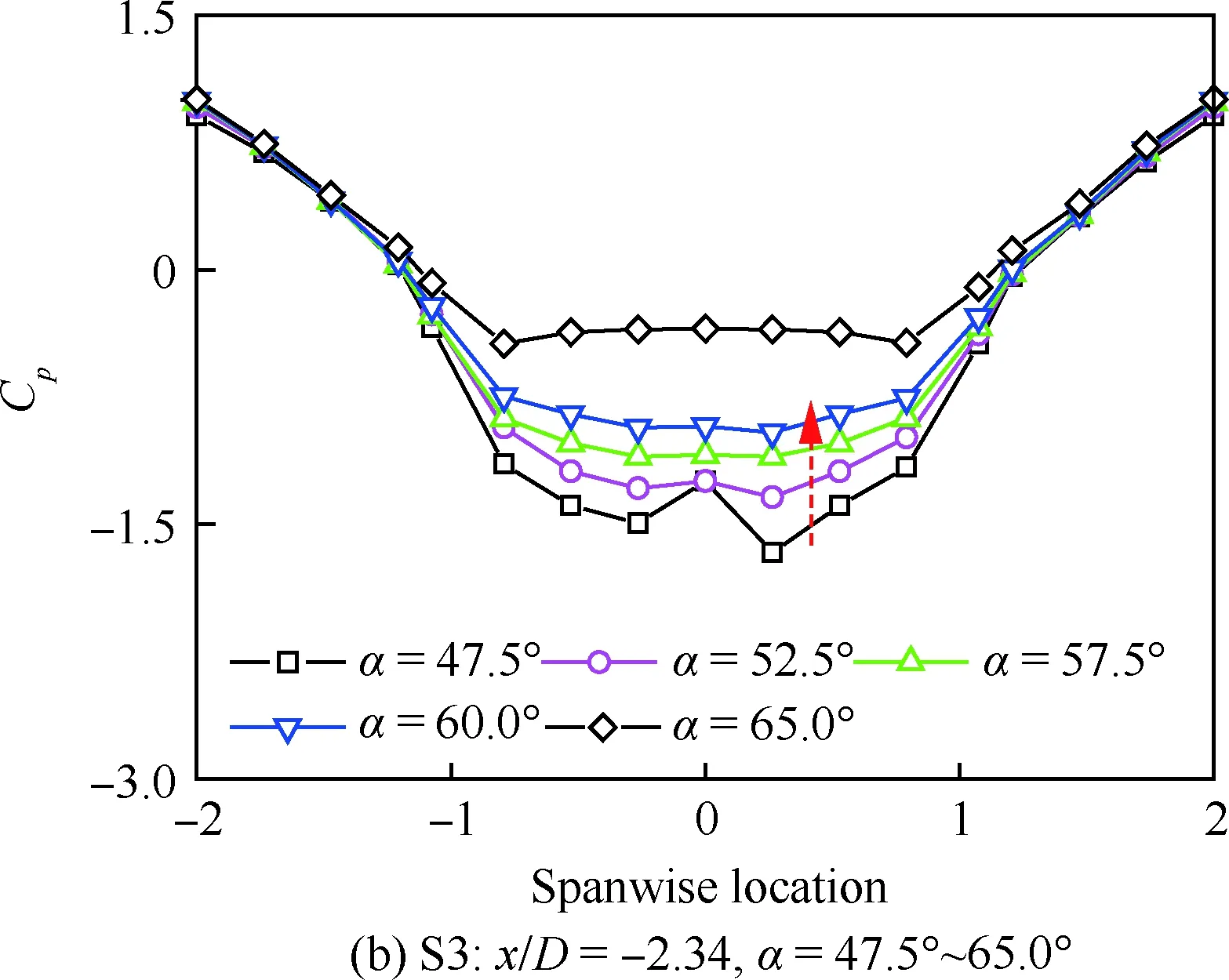
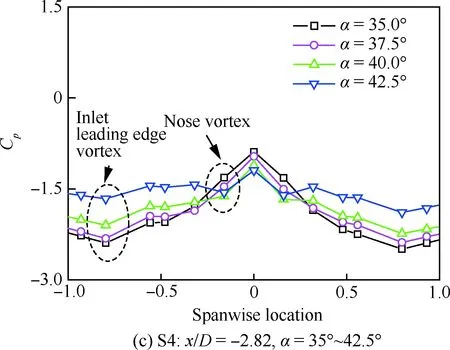
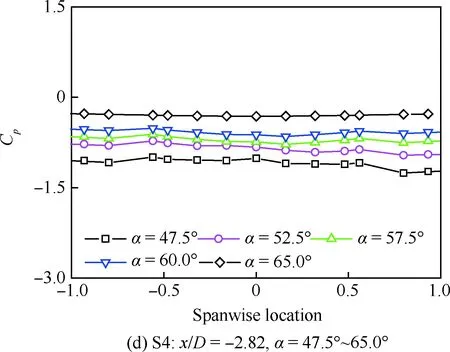
圖12 S3和S4截面壓力系數分布(α=35°~ 65°,試驗)Fig.12 Distributions of S3 and S4 pressure coefficients (α=35°-65°, Experiment)
進氣道前緣負壓區面積及壓力值出現顯著減小,進氣道前緣渦已經完全破裂。S4截面壓力分布上,進氣道前緣渦和機頭渦所誘導吸力峰值同時消失。
當α= 35.0°~47.5°時(即圖5中D迎角區),機頭渦充分發展,進氣道前緣渦從開始破裂到完全破裂。當α= 47.5°~65°時(即圖5中E迎角區),機頭渦進入破裂發展階段。
對于機翼流動,圖14為α= 42.5°和47.5°時機翼的壓力云圖。圖15為S8截面壓力系數分布隨迎角的變化曲線。S8截面位于機翼最靠前截面。當α= 35.0°~ 42.5°時,機翼前緣存在低壓區。融合機身渦在S8截面內側誘導產生了吸力峰,機翼渦在S8截面外側誘導產生了吸力峰。當α=40.0°時,內外側的吸力峰均到達最大值,隨迎角繼續增加,內外側的吸力峰均減弱。當α= 47.5°時,機翼前緣低壓區消失,S8截面的吸力峰消失,壓力分布變平坦,此時機翼渦完全破裂。
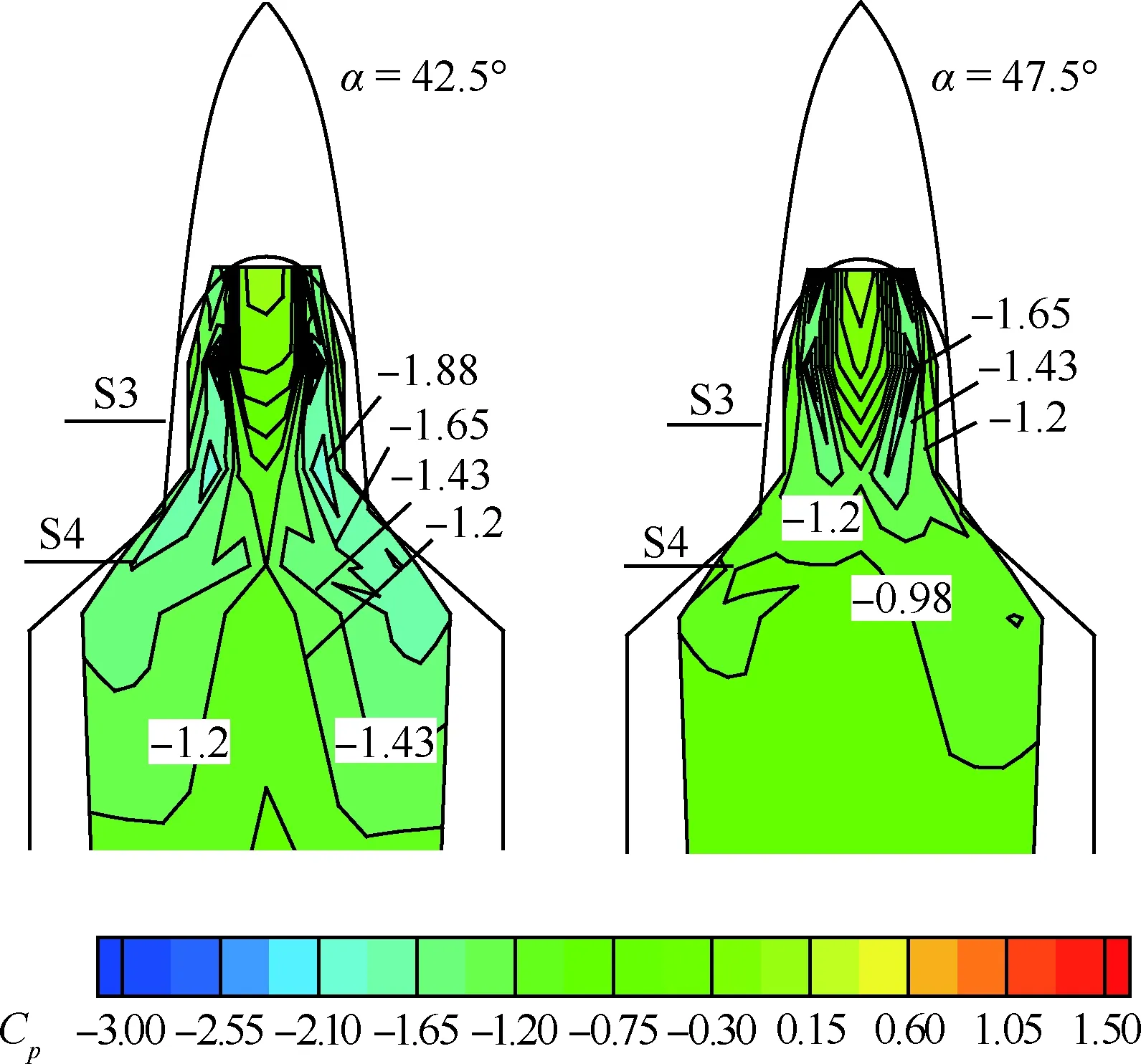
圖13 機身壓力系數云圖(α=42.5°,47.5°,試驗)Fig.13 Contours of pressure coefficients over the forebody (α=42.5°,47.5°, Experiment)
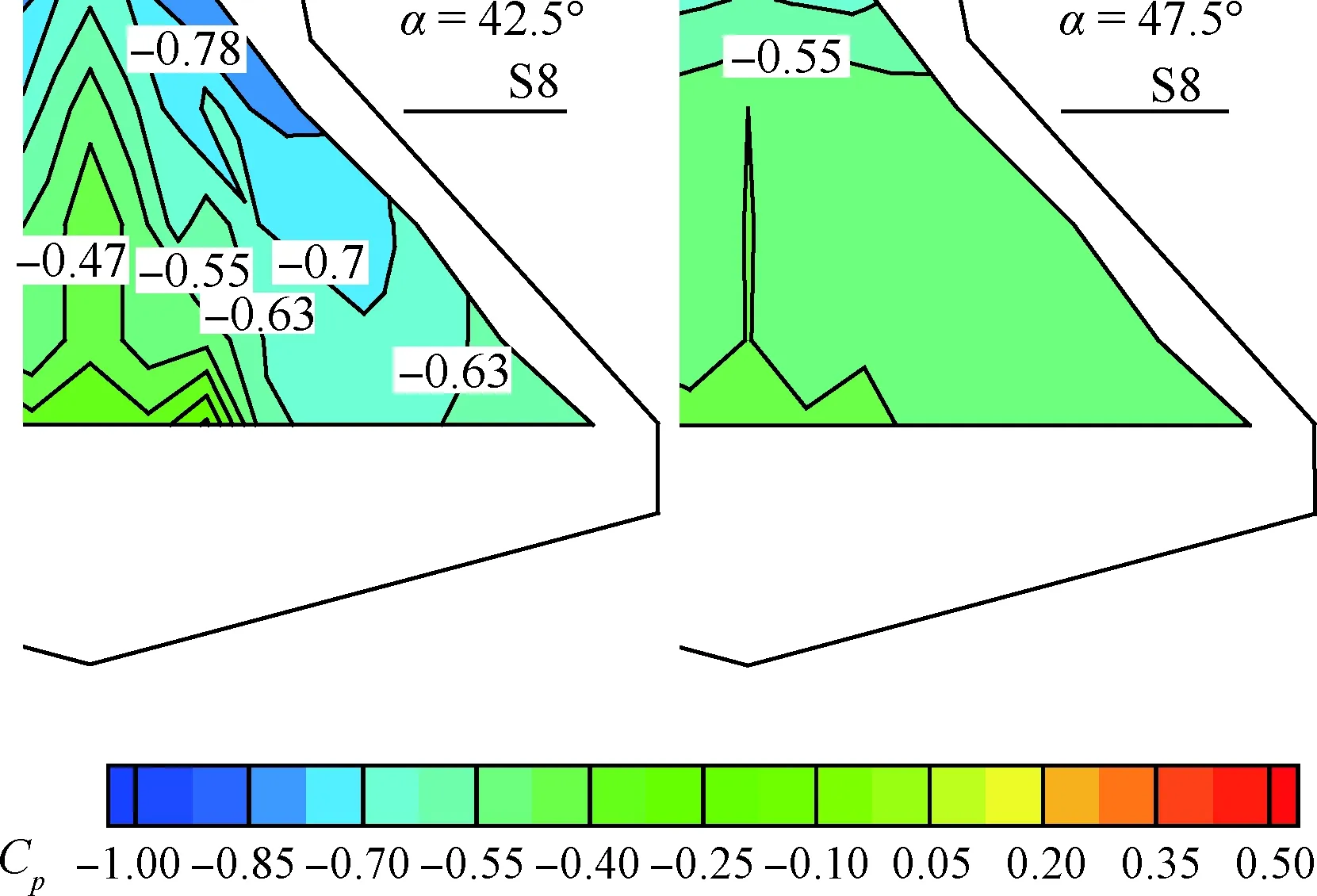
圖14 機翼壓力系數云圖(α=42.5°,47.5°,試驗)Fig.14 Contours of pressure coefficients over the wing (α=42.5°,47.5°, Experiment)
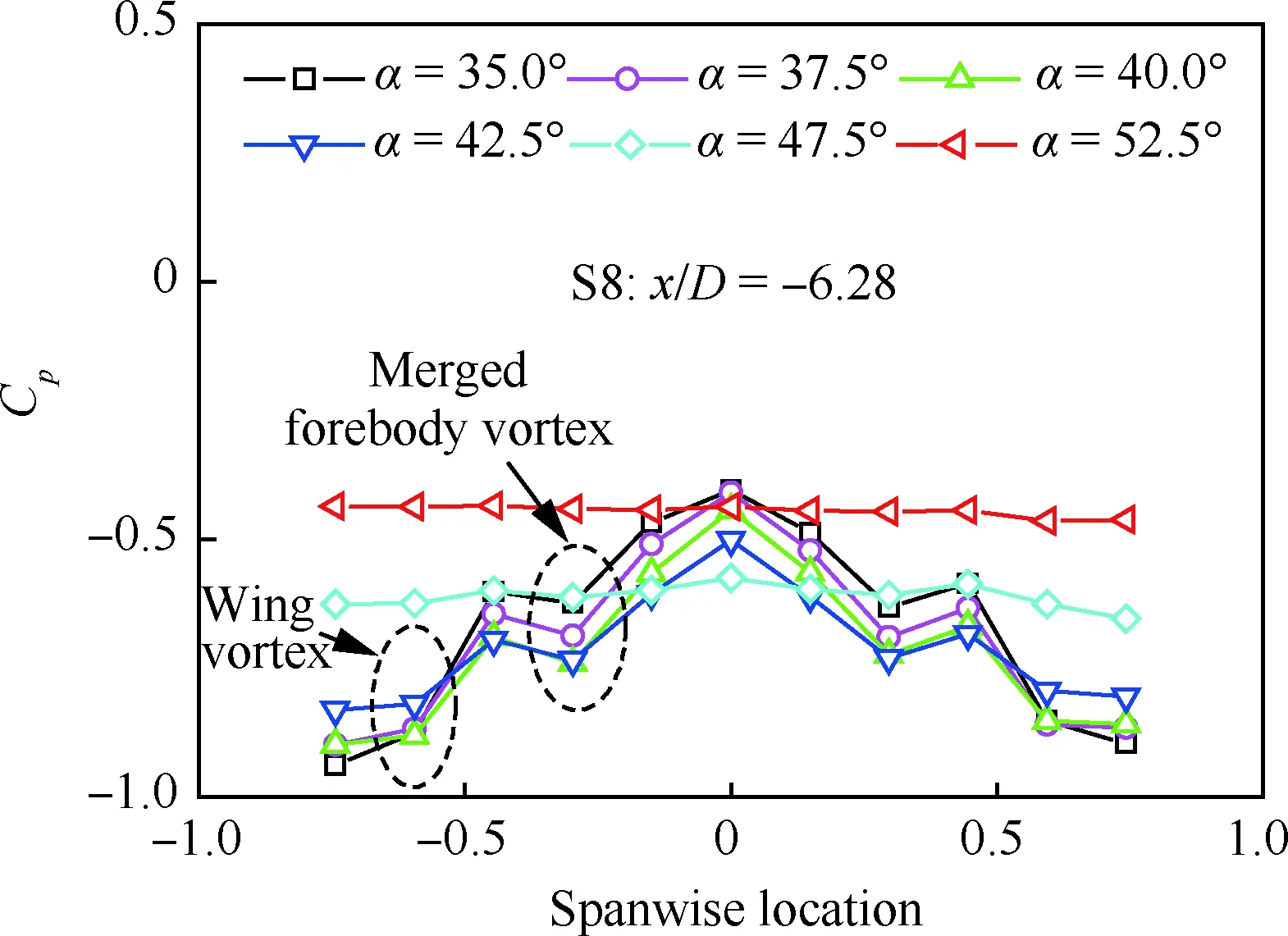
圖15 S8截面壓力系數分布(α=35.0°~52.5°,試驗)Fig.15 Distributions of S8 section pressure coefficients (α=35.0°-52.5°, Experiment)
3.2 俯仰力矩的部件貢獻特性
圖16為數值計算得到的全機俯仰力矩Cm_cfd(虛線)和不同部件俯仰力矩分量隨迎角的變化規律。為了驗證計算結果,圖16也給出了風洞試驗結果Cm_exp(實線)。計算結果Cm_cfd與試驗結果Cm_exp變化趨勢基本一致,幅值基本吻合。計算劃分的部件為機身前體、機身后體、邊條和機翼等,相應的部件俯仰力矩分別為Cm_fore、Cm_aft、Cm_strake和Cm_wing。可以看出,機身前體提供了大部分的正俯仰力矩即抬頭力矩。當α= 40.0°時,機身前體提供的抬頭力矩最大。邊條產生了微弱的抬頭
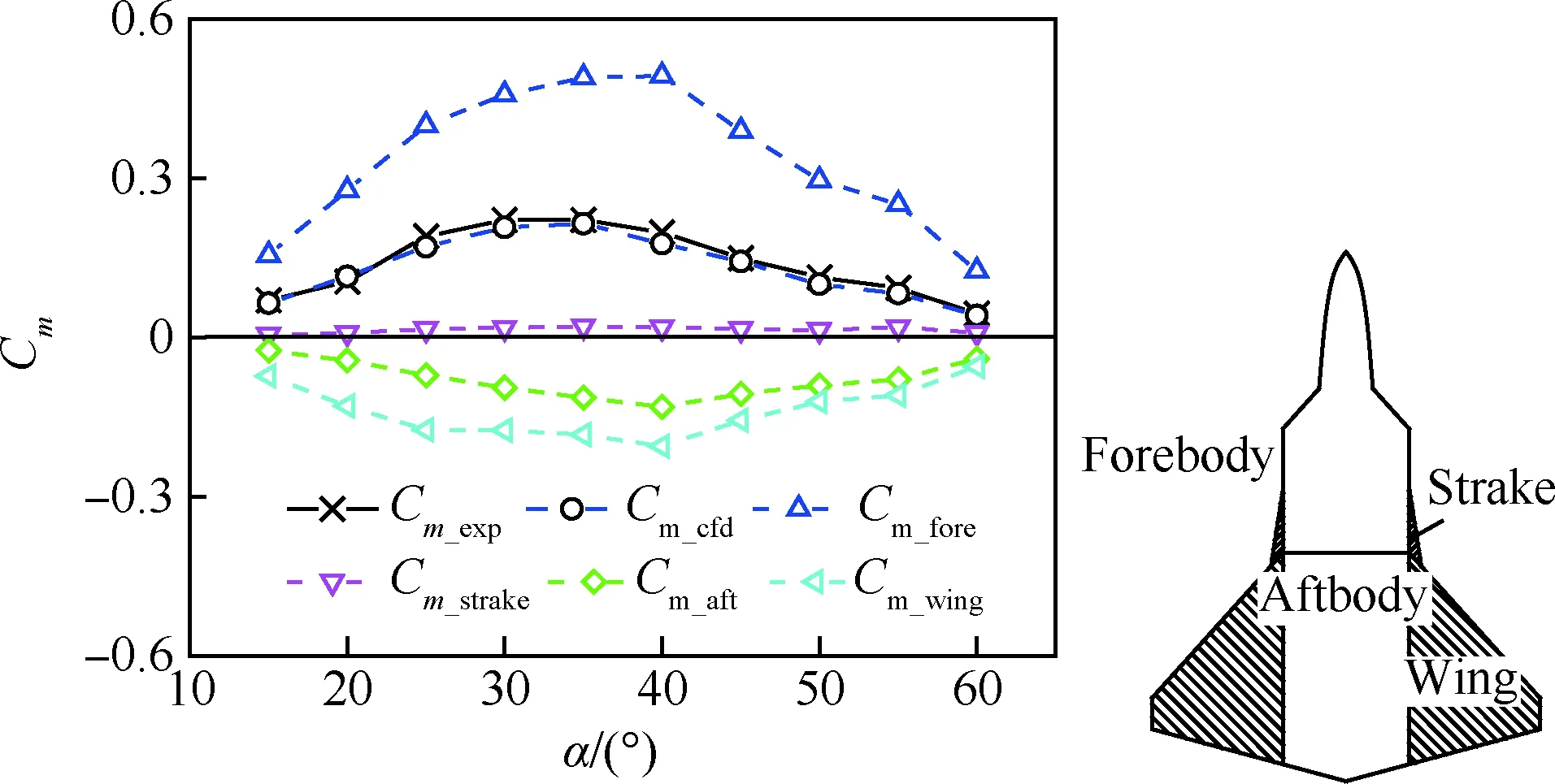
圖16 全機俯仰力矩及分部件俯仰力矩 隨迎角變化Fig.16 Variation of overall pitching moments and its components with angles of attack
力矩。機身后體和機翼提供了負俯仰力矩即低頭力矩。隨迎角變化,機身前體的抬頭力矩始終大于機身后體和機翼的低頭力矩,因此,機身前體是產生抬頭力矩的主要部件。結合流動特性,在中大迎角,機頭渦的演化規律與抬頭力矩的非線性增長和衰減密切相關,盡管進氣道前緣渦同樣與產生抬頭力矩有關,但其作用沒有機頭渦顯著,且在中大迎角機頭渦對進氣道前緣渦存在有利誘導。因此,機頭渦是抬頭力矩產生的主控流動。
圖17為α=40°時機身前體S1~S7單個截面法向力CN_sec和截面俯仰力矩Cm_sec沿模型體軸的變化規律。其中CN_sec和Cm_sec計算公式分別為
(1)
Cm_sec=CN_sec(L-xsec)b
(2)
式中:θi為測壓點法向量在縱向對稱面的投影角;φi為測壓點法向量在橫截面的投影角;Δsi為積分弧長;L為參考中心與機頭頂點的距離;xsec為測壓截面與機頭頂點的距離;S為機翼面積;b為平均氣動弦長。
可知,CN_sec和Cm_sec均在進氣道前緣S4截面到達最大。S4截面之前的CN_sec較小,距參考中心遠;S4截面之后的CN_sec較大,距參考中心近。因此,在進氣道前緣S4截面,Cm_sec最大。對α= 40.0°,進氣道前緣處是抬頭力矩產生的關鍵位置。
當α= 40.0°時,機頭渦充分發展,進氣道渦開始破裂,而機翼渦完全破裂。圖18為α= 40.0°時機身前體空間流場沿體軸的演化規律。S2截面可清晰看到機頭渦,它是由側緣分離的自由剪切層卷起而形成的,沿軸向逐漸遠離物面。S4截面除機頭渦外,還存在破裂中的進氣道前緣渦。S6截面為融合機身渦。圖19為機頭渦和進氣道前緣渦渦核渦量沿軸向的變化。機頭渦在S3截面渦量最大,進氣道前緣渦在S4截面渦量最大,但其最大渦量遠小于此處機頭渦。圖20為α= 40.0°機身前體的壓力系數云圖,進氣道前緣附近存在較大面積的負壓區,負壓區靠近機身對稱面,與機身負壓區相連,主要是由于機頭渦導致的。因此,進氣道前緣成為關鍵位置的原因是此處存在較強的機頭渦。
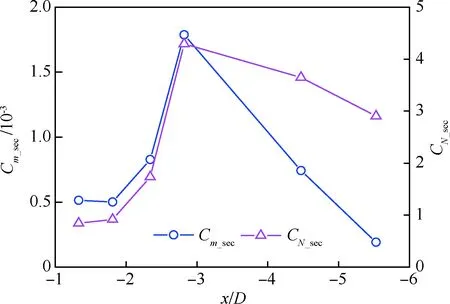
圖17 α=40.0°時截面法向力和俯仰力矩 沿軸向變化(試驗)Fig.17 Evolution of sectional normal force and sectional pitching moment along the body axis at α=40.0° (Experiment)
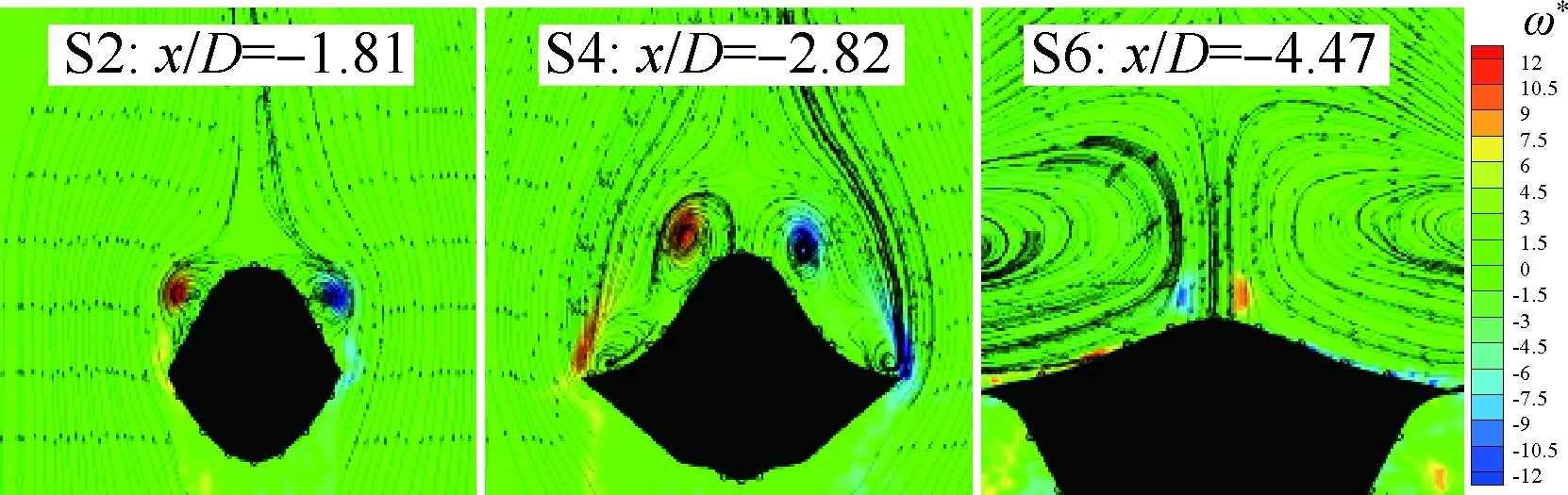
圖18 α=40.0°時機身前體渦量及流線圖(試驗)Fig.18 Vorticity of forebody vortex and streamlines at α=40.0° (Experiment)

圖19 α=40.0°時前體截面渦量沿軸向變化(試驗)Fig.19 Variation of vorticity of forebody vortex along the body axis at α=40.0° (Experiment)
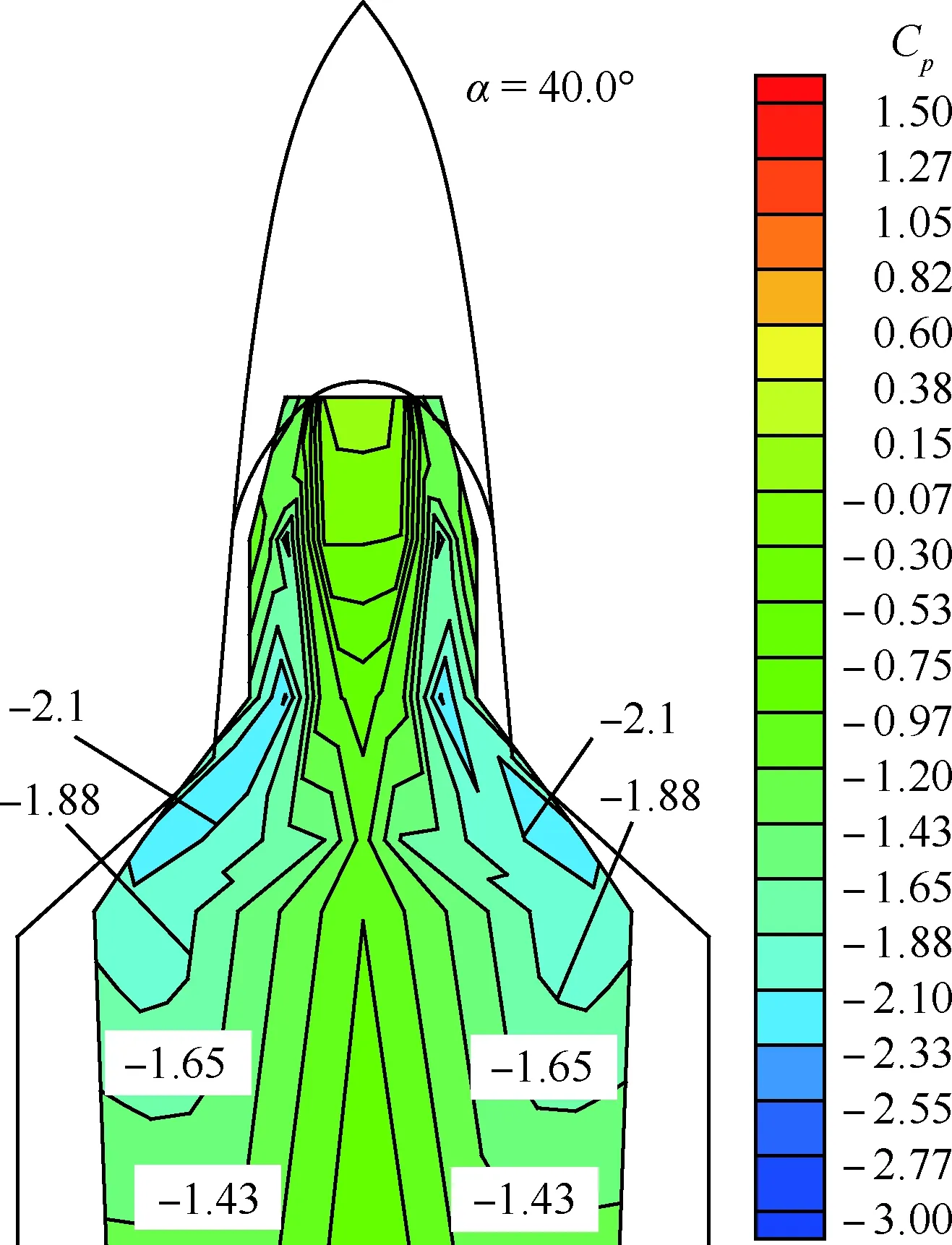
圖20 α=40.0°時機身前體壓力系數云圖(試驗)Fig.20 Contour of pressure coefficient over the forebody at α=40.0° (Experiment)
3.3 大迎角機身擾流板控制技術
全機正俯仰力矩主要來源于機身前體,機頭渦是大迎角下產生抬頭力矩的主控流動。小迎角下,抬頭力矩常通過氣動舵面進行控制。為了解決大迎角下舵面效率降低的問題,需要發展大迎角下俯仰力矩控制技術。機身擾流板采用主動控制的設計思路,將擾流板放置在抬頭力矩產生的關鍵位置進氣道前緣處,在大迎角時開啟擾流板用來實現對抬頭力矩的控制。
圖21為機身擾流板示意圖及對俯仰力矩的控制效果,其中擾流板的位置和形狀參數xs= 3.4D,hs= 0.55D,ws=0.55D,δs= 60°。在線性增長區,擾流板對俯仰力矩幾乎沒有影響。在非線性增長區末段,擾流板對俯仰力矩開始發揮控制效果。在衰減區即大迎角區域,擾流板的控制效果較好。當α=40°時,擾流板能使正俯仰力矩下降了62%。根據流動演化規律,在線性增長區,機頭渦并未出現,因此,擾流板對俯仰力矩幾乎沒有控制作用。在非線性增長區,機頭渦處在生成到發展過程中,機頭渦遠離模型對稱面,擾流板發揮作用有限。在大迎角區,機頭渦靠近對稱面,擾流板產生控制效果。
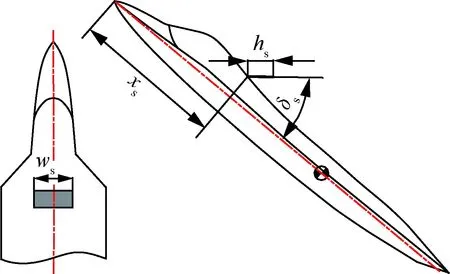

圖21 擾流板安裝示意圖及控制效果(試驗)Fig.21 Schematic of spoiler and control effect (Experiment)
圖22為測壓試驗得到的機身前體S1~S7測壓截面總和∑Cm_sec隨迎角的變化規律及擾流板效果,通過前體測壓積分得到前體∑Cm_sec與圖16 中計算得到的機身前體俯仰力矩Cm_fore在幅值上有所差異,但是變化趨勢基本一致。前體截面積分力矩也沒有反映出圖21測力結果中俯仰力矩的非線性增長特點。但是,擾流板的控制效果與圖21中測力結果相同,即在大迎角時能減少前體貢獻的正俯仰力矩。
圖23為α= 40.0°時截面俯仰力矩Cm_sec和截面法向力CN_sec沿體軸的變化。在擾流板作用下,各截面Cm_sec和CN_sec均表現減小趨勢,在擾流板附近減小最顯著。擾流板對機頭渦渦位基本沒有影響,圖24為α= 40.0°時擾流板對機頭渦渦量的影響。在擾流板位置之前,擾流板使機頭渦渦量出現較大的降低,減弱了機頭渦強度。在擾流板位置之后,根據渦破裂判定方法[24],未開啟擾流板,機頭渦在S6之后破裂。開啟擾流板能使機頭渦破裂點提前至S5。圖25為擾流板對S2和S4截面壓力分布的影響。從圖中可以看出,擾流板使S2和S4的吸力值降低,這是由于機頭渦的減弱導致的。S2距擾流板較遠,降低僅發生在吸力峰值處;S4靠近擾流板,整個背風側吸力值均減小,擾流板對進氣道前緣渦產生了一定的影響,但主要是對機頭渦的抑制。因此,大迎角下,擾流板通過減弱機頭渦渦量來減小前體截面的吸力值,從而減少了機身前體貢獻的法向力和俯仰力矩,實現了抬頭力矩的控制。
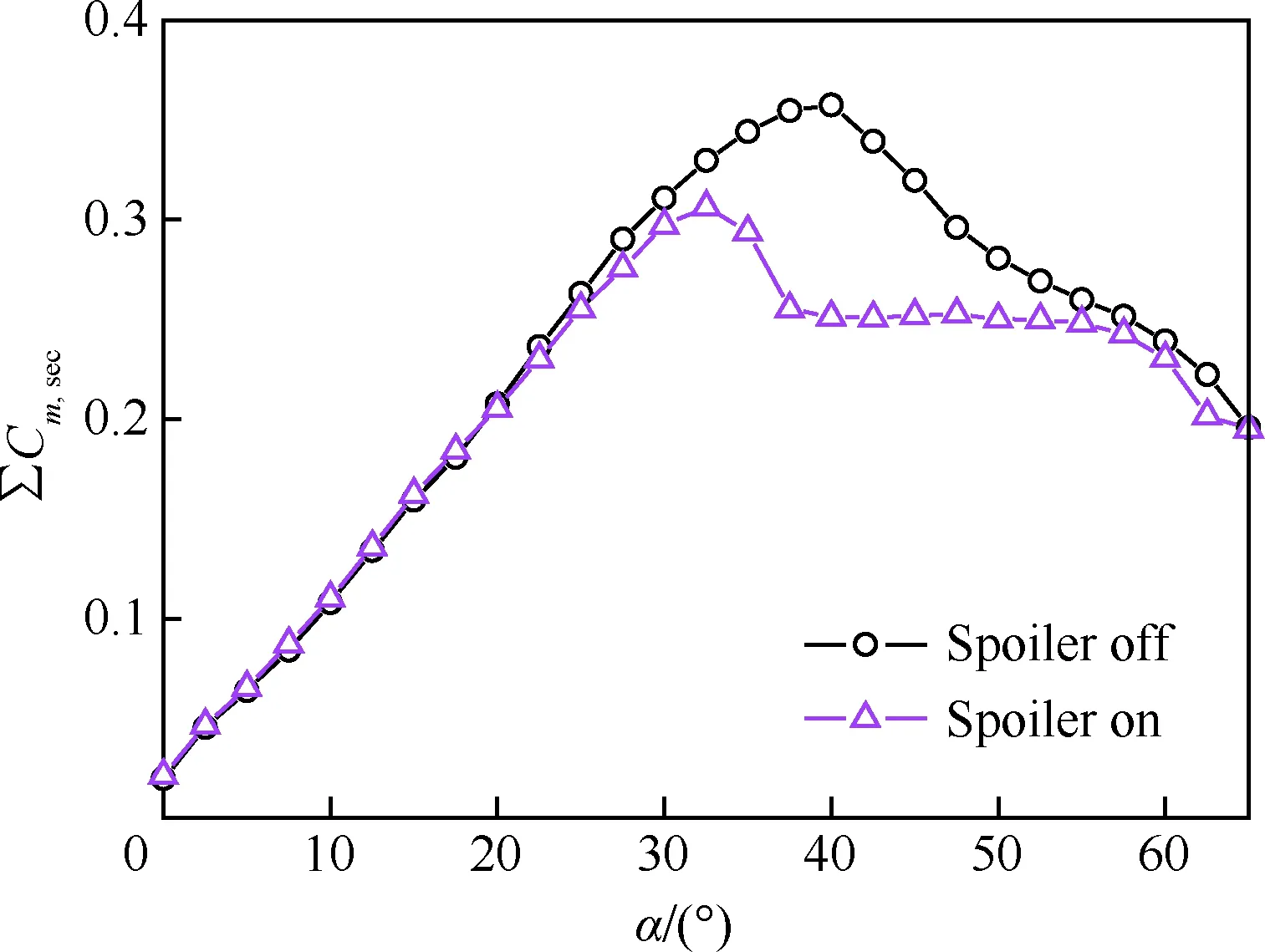
圖22 擾流板對機身俯仰力矩的影響(試驗)Fig.22 Effect of spoiler on forebody pitching moment (Experiment)
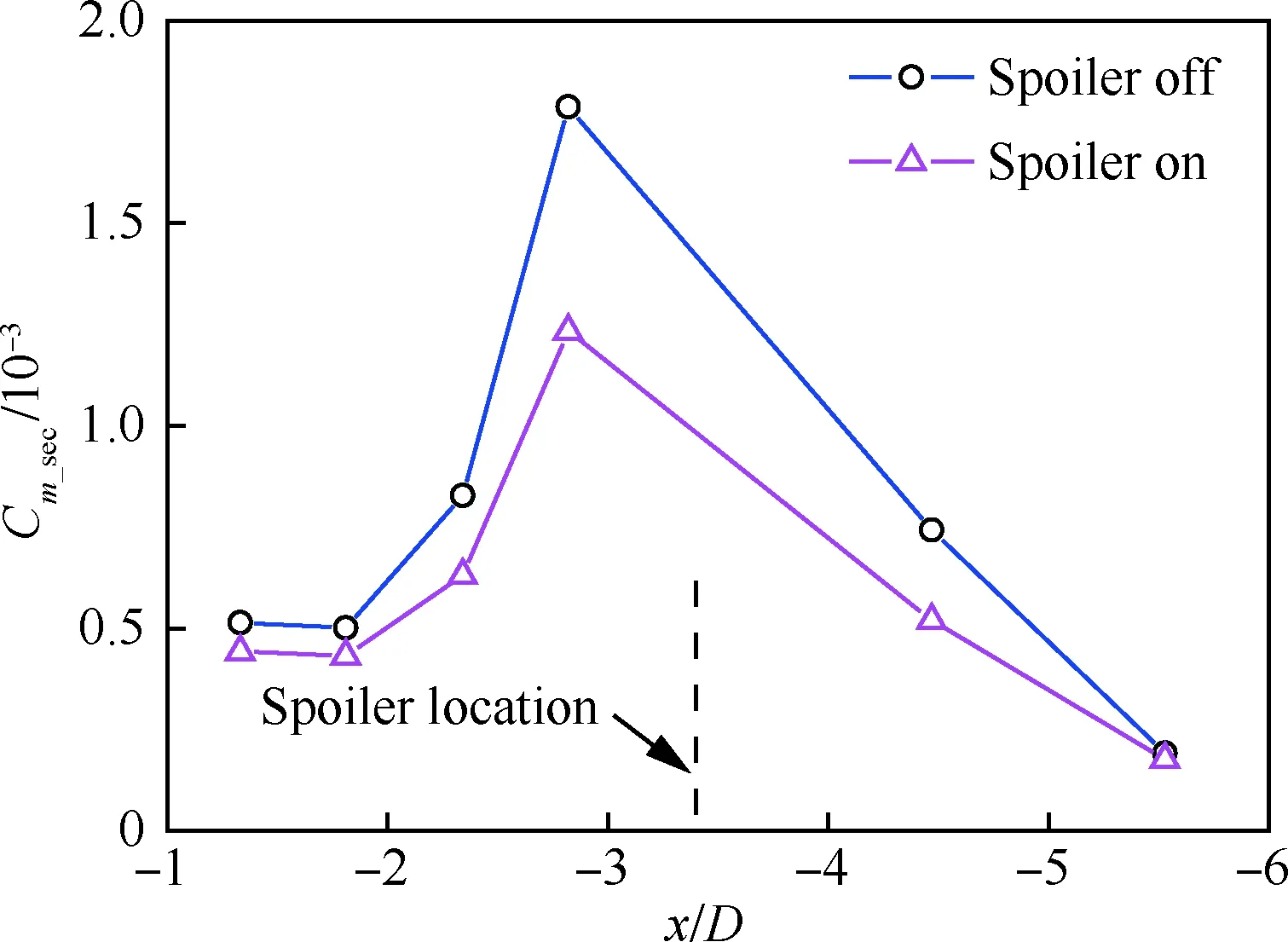
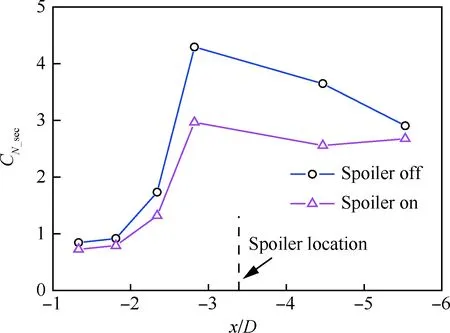
圖23 α=40.0°擾流板對前體各截面俯仰力矩和 法向力的影響(試驗)Fig.23 Effect of spoiler on sectional pitching moment and normal force over the forebody at α=40.0°(Experiment)
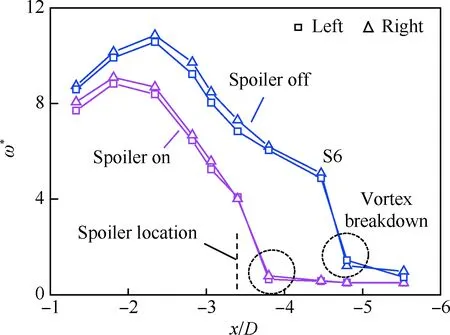
圖24 α=40.0°擾流板對機頭渦渦量的影響(試驗)Fig.24 Effect of spoiler on vorticity of nose vortex at α=40.0° (Experiment)
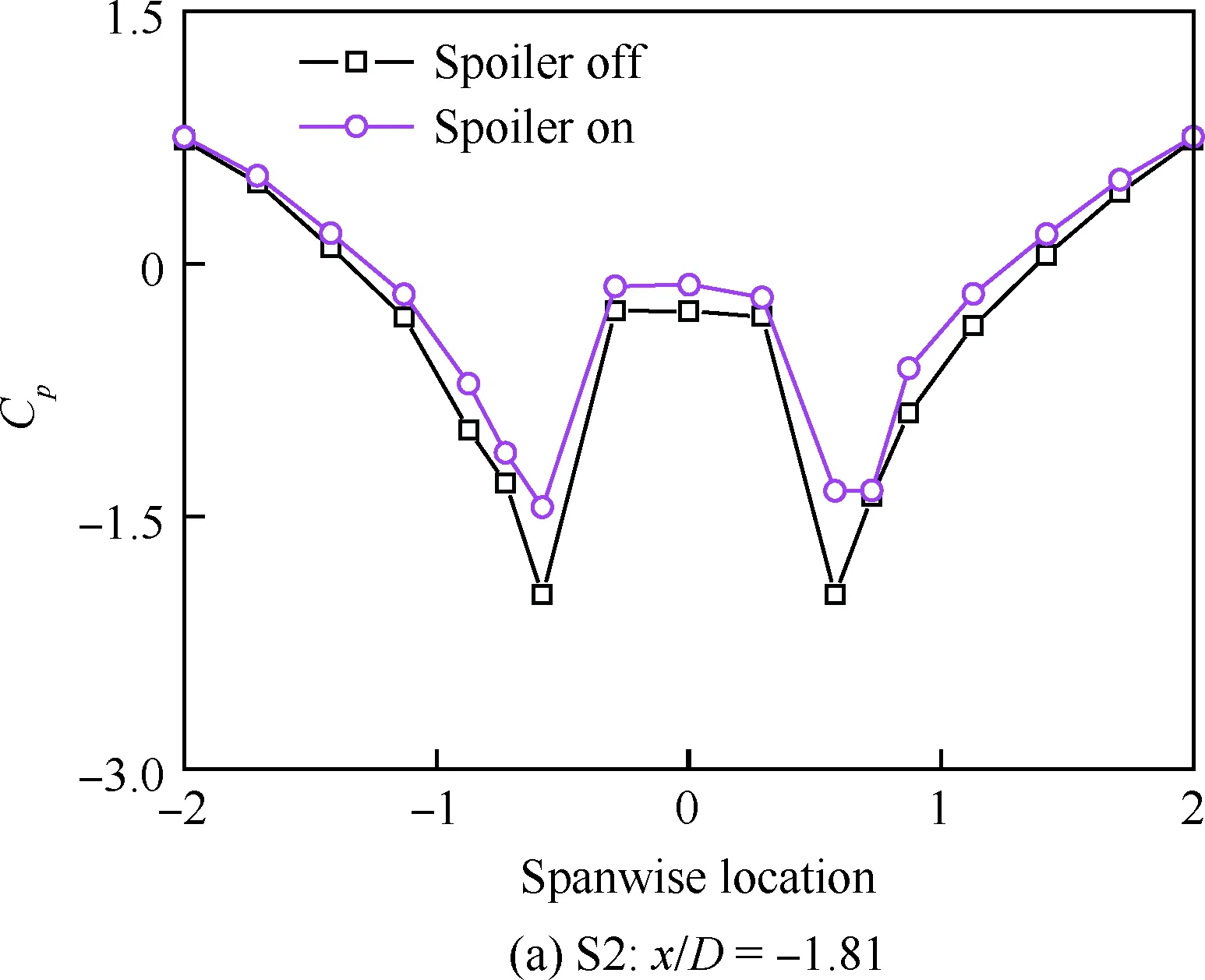
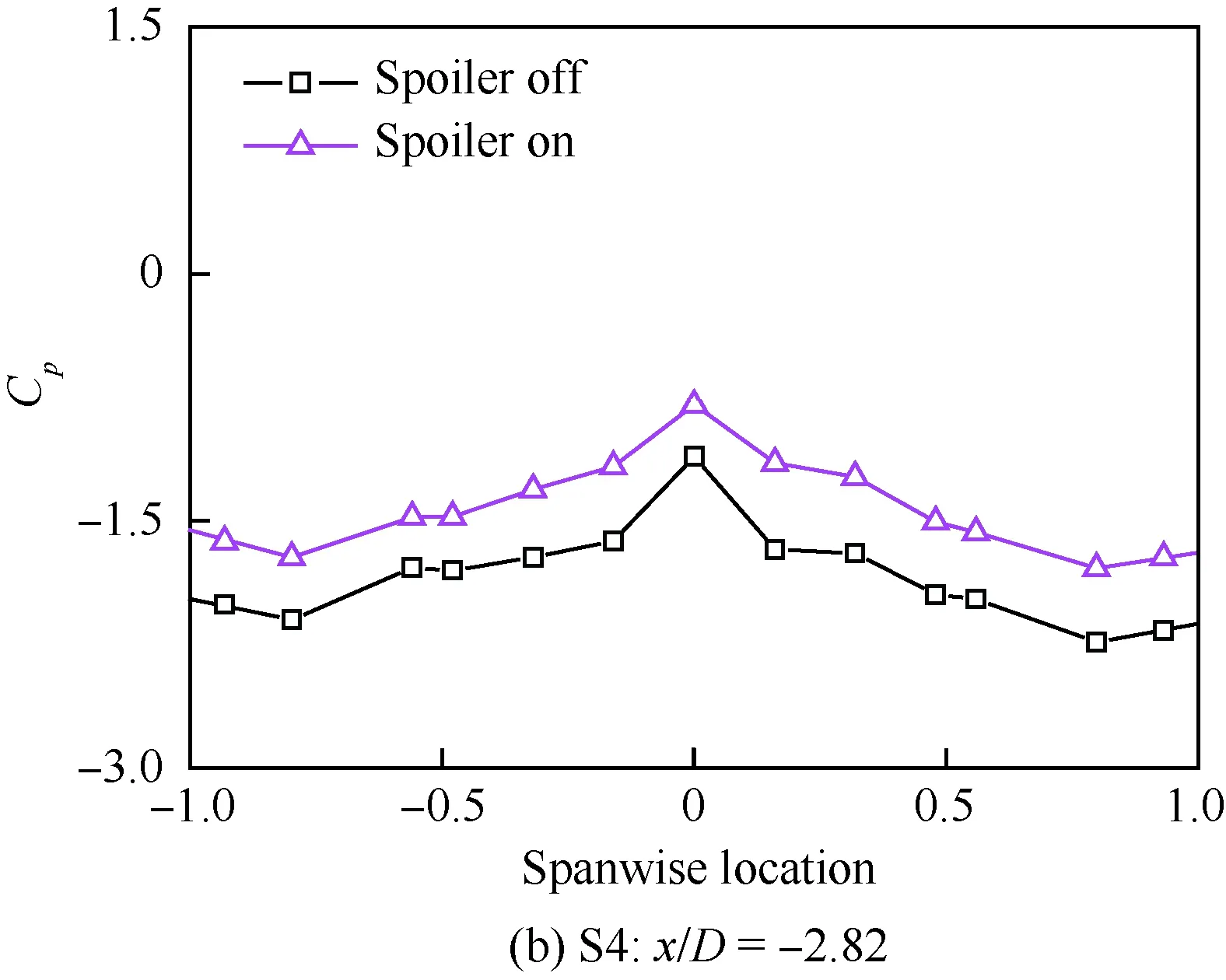
圖25 α=40.0°時擾流板對S2和S4壓力系數 分布的影響(試驗)Fig.25 Effect of forebody spoiler on the S2 and S4 pressure coefficient distributions at α=40.0° (Experiment)
另外,在小迎角時,擾流板的作用類似于阻力,在大迎角時,擾流板可使機頭渦強度降低,因此,擾流板不可避免地會帶來一些升力損失和附加阻力,該控制技術存在不足之處。但是,擾流板僅在大迎角區發揮控制效果的特點,使其具有一定的應用前景,下一步研究可考慮優化擾流板位形參數或擾流板開孔等,在減小負面作用的同時提高控制效果。
4 結 論
本文研究了尖側緣機身布局的正俯仰力矩(抬頭力矩)問題,得到了俯仰力矩的迎角分區特性及流動演化規律;找到了正俯仰力矩產生的主要部件和主控流動;基于主控流動,發展了大迎角機身擾流板的控制技術;得到了以下結論:
1) 根據全機俯仰力矩隨迎角的變化規律,可分為3個區域:線性增長區α= 0°~15°,非線性增長區α= 17.5°~32.5°,衰減區α= 35°~65°。
2) 全機流動狀態演化規律如下:在線性增長區,α= 0°~5° 附著流,α= 5°~15° 進氣道前緣渦和機翼渦形成;在非線性增長區α= 17.5°~32.5°,機頭渦形成,進氣道前緣渦逐漸增強,機翼渦增強后出現破裂;在衰減區,α=35.0°~42.5°機頭渦增強后出現破裂,進氣道前緣渦破裂發展,機翼渦完全破裂;α=47.5°~65.0°,機頭渦破裂發展,進氣道前緣渦和機翼渦完全破裂。
3) 機身前體是產生正俯仰力矩的主要來源,機頭渦是大迎角下正俯仰力矩的主控流動。當α=40.0° 時,機身前體截面正俯仰力矩在進氣道前緣處達到最大,因為該處機頭渦誘導產生了較強的法向力。
4) 提出了大迎角機身擾流板控制技術,產生了較好的控制效果。在線性增長區,模型未出現較大尺度的機頭渦;在非線性增長區,模型出現了機頭渦,但其展向渦位遠離模型對稱面,在這2個迎角區域,擾流板幾乎不產生控制效果。在衰減區即大迎角時,機頭渦展向渦位靠近模型對稱面,擾流板發揮控制作用。當α= 40.0°時,擾流板可使正俯仰力矩減少62%。擾流板通過減弱機頭渦渦量來減少了機身前體貢獻的法向力和正俯仰力矩,實現了抬頭力矩的控制。該控制技術的不足之處是擾流板會帶來一些升力損失和附加阻力,進一步研究可考慮優化擾流板位形參數。