艦載機人工進場著艦精確軌跡控制技術
2019-04-22 10:43:10段卓毅王偉耿建中何大全馬坤
航空學報 2019年4期
段卓毅,王偉,耿建中,何大全,馬坤
航空工業第一飛機設計研究院,西安 710089
航母艦隊可有效地執行以遠距離奪取局部海域制空權、制海權為目標的對地/海打擊、反潛作戰、遠程預警、作戰指揮等任務[1-4],是衡量國家綜合實力的象征。艦載機可以在以航母為中心的1 000 海里(1海里=1.852 km)范圍內執行作戰任務,具有更好的使用靈活性和更強的對海/對空協同作戰能力,是航母艦隊執行空中打擊、指揮、預警等任務的主體之一。中型航空母艦上的甲板總長僅300 m左右,起落段為100~200 m,只有路基跑道的1/10[5],盡可能地降低觸艦速度及觸艦載荷是艦載機發展的關鍵技術之一。在低速狀態下,艦載機的操縱性、穩定性和飛行品質等將受到顯著地削弱,迫切需要引入進場著艦精確軌跡控制技術,以減輕飛行員操縱負擔,提高著艦成功率。
1911年1月18日,美國飛行員Eugene Ely駕駛一架螺旋槳飛機在“賓夕法尼亞”號巡洋艦上完成了人類歷史上的首次著艦[6]。最初裝備在航母上的艦載機是螺旋槳飛機,由于它的質量輕、體積小、飛行速度很低,在航母上降落時飛行員有足夠的反應時間,故最早期的艦載機采用陸基飛機相同的著陸方式,輔以早期的阻攔裝置制動就可以滿足著艦要求[7]。從20世紀初到第二次世界大戰期間,艦載機著艦引導工作是由站在飛行甲板末端左側的著艦信號官(Landing Signal Officer,LSO)通過手持旗板打信號來指揮艦載機進艦與著艦[8-10]。第二次世界大戰后,隨著航空科學技術的發展,艦載機翼載荷逐漸增大,其著艦時的飛行速度也越來越高,“示牌進場”方式引導著艦的有效性已經大大下降。1952年英國首先提出在航母上使用斜角甲板的設計思想[1],實現了起飛和著艦的同時作業,增加了著艦區的縱向距離,擴大了著艦范圍,同時也使艦載機具備了逃逸復飛能力,大大提高了艦載機的出動率及生存率。此時,在艦載機進艦過程中,開始采用了等角下滑著艦技術[11]。為了更好地實現等角下滑,進場動力補償技術被引入到艦載機著艦控制中,以減輕飛行員操縱負擔[12]。同時期,光學助降系統也逐漸被使用到航母上,確保艦載機沿著基準引導光束下滑著艦,進而指引等角下滑[13]。在20世紀70年代,美國海軍開發了以自動著艦為主的全天候著艦引導系統(All Whether Carrier Landing System, AWCLS),為艦載機的精確進場著艦軌跡控制提供了有力保障[14-17]。AWCLS有3種工作模態:全自動模態、聯合半自動模態和艦面控制進場模態。
本文總結分析了艦載機人工著艦控制技術的發展歷程,首先,對進場著艦精確軌跡控制的應用需求進行討論,指出其必要性和直觀的有益效果;隨后,討論了艦載機進場著艦精確軌跡控制的演變過程、發展趨勢及涉及的關鍵技術;最后,討論了艦載機進場著艦精確軌跡控制對飛機設計和減輕駕駛員負擔的有益效果。
1 艦載機進場著艦概況及精確軌跡控制應用需求
1.1 艦載機進場著艦軌跡
天氣狀況良好,航空母艦周圍沒有云,且能見度超過5 km以上時,飛行員運用目視方式進場及人工著艦。采用目視方式進行著艦的著艦機在航空母艦上空按長方形航線進行左回旋飛行,如圖1[11]所示,此時的航空母艦位于長方形右邊線的中心PL1。
類似地,將上邊線中心命名為PL2,左邊線中心命名為PL3,下邊線中心命名為PL4。如果需要保持著艦待命狀態,在不降低高度的情況下按這一長方形航線進行回旋飛行,每通過一次航空母艦上空PL1時與進場操作員取得聯系,確認是否下達了著艦許可指示。
一旦下達了著艦許可,艦載機通過PL4點后,向航空母艦前進方向飛行,進入著艦航線,此時的飛行高度約為240 m,飛行速度在154~180 m/s 之間,如圖2[11]所示,圖中V為飛行速度,H為飛行高度,IC為著艦區中心線,IM為中心線延長線,AR為著艦區邊界到著艦區中心線的距離,FLOCS為下滑道。過航空母艦上空或右舷時放下尾鉤,發動機油門采用85%~89%軍用推力繼續沿直線飛行一段距離后,打開減速板,表示要著艦。高度下降到180 m時作180°左轉彎后,逆著航空母艦前進方向沿左舷作水平飛行。在這段飛行中,飛行員檢查飛機重量,要確認飛機重量小于最大著艦重量,飛機在航空母艦側旁上空飛行約 1 852 m后再次作180°轉彎,飛抵著艦區中心線延長線的后方,進入下滑道,飛機的飛行高度為116 m,飛行速度為64~66.7 m/s,離艦約1 389 m,著艦指揮官操作菲涅耳透鏡光學著艦系統的信號切換燈亮,使飛行員確認飛機進入下滑道,于是飛機便可遵循該系統的引導沿下滑道著艦,此時飛機將保持一定速度以及一定迎角飛行。

圖1 艦載機目視進場示意圖[11]Fig.1 Sketch of visual approach for carrier-based aircraft landing[11]
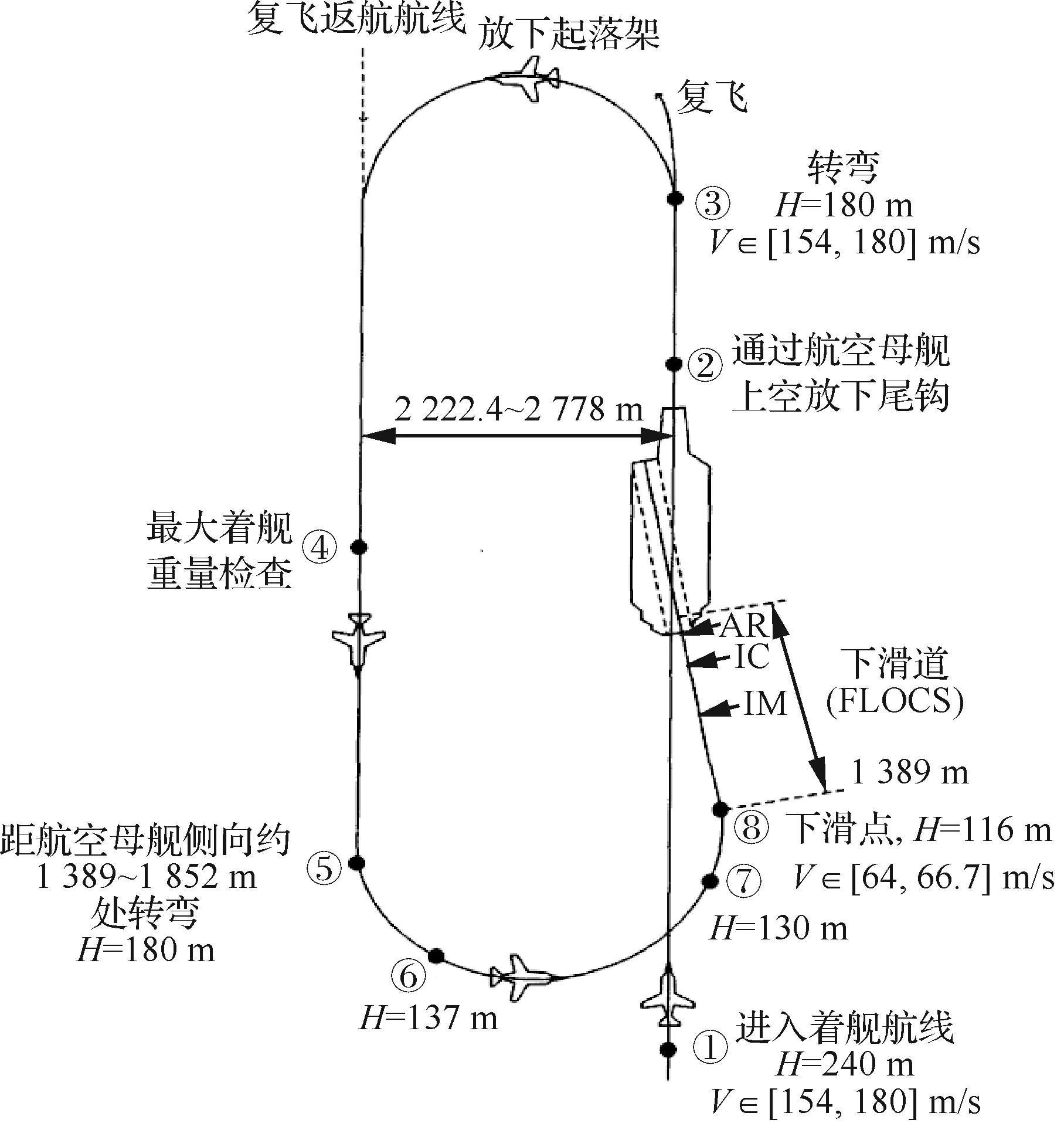
圖2 艦載機目視著艦航線[11]Fig.2 Flight path of carrier-based aircraft visual landing[11]
1.2 艦載機進場著艦精確軌跡控制應用需求
艦載機在航空母艦上的著艦經常被形容成在針尖上跳舞或者是受控制的高速墜落,其降落程序和一般降落陸基機場著陸完全不同;降落在陸基機場是以拉飄的形式慢速降落,可是降落在航母甲板上卻是在海上晃動的環境下,以高速度降落在橫向只有幾十公尺寬,縱向僅有4道攔阻鉤的著艦區,著艦困難度非常高、著艦過程中飛行員操縱工作量特別大。例如,操縱F/A-18“超級大黃蜂”的飛行員,在實施“著艦”的最后18 s內,需要對航線、迎角和速度進行數十次微小的調整,以確保戰機尾鉤能準確鉤住攔阻索,工作量大、難度高、風險高。使得許多海軍戰機在完成令人疲勞的作戰任務后,還要打起精神完成如此困難的著艦,經常就會發生事故。
美國海軍研究表明,在著艦訓練費用方面,現階段美國海軍每年的艦載機著艦訓練費用超過10億美元[16],并且浪費了許多飛行時間及艦載機寶貴且有限的壽命。因此如何使艦載機著艦更為容易,一直都是擁有航母的國家海軍在思考的主要問題之一。
通過對艦載機進場著艦軌跡進行精確控制,可以降低著艦難度,并使飛行員的著艦安全更有保障,把寶貴的訓練時間更多地用在學習戰斗技能上;減小機體結構所受到的沖擊載荷,增加艦載飛機的使用壽命,增加可用戰機數量并降低了維修費用;大大減少著艦脫鉤數量,使戰機空中加油次數降低,降低對艦上空中加油機的數量需求;無需為戰機降落創造條件而過多犧牲航母的機動性,并且可以縮減運營成本等等。
可見,無論是從降低著艦風險、減少著艦訓練花費,還是保證航母機動性等方面;對艦載機進場著艦軌跡進行精確控制,都將取得非常直觀的收益。
2 艦載機進場著艦引導與控制系統
2.1 著艦引導技術
艦載機著艦系統從最初的人工著艦方式,先后發展了鏡面光學助降系統(Mirror Optical Landing System, MOLS)、菲涅爾透鏡光學助降系統(Fresnel Lens Optical Landing System, FLOLS)、全天候電子助降系統(雷達引導系統)和導航衛星助降系統;從早期的著艦信號官(圖3)發展到現代的著艦信號官(圖4),引入了菲涅爾光學助降裝置(圖5[13])和精密跟蹤測量雷達(圖6[6]),有效地改進了著艦引導精度。美國海軍一直在開展航母機艦適配性試驗,并開發未來著艦系統,包括改進菲涅爾透鏡著陸系統(Improved Fresnel Lens Optical Landing System, IFLOLS)、遠距離布陣系統(Long-Range Lineup System,LRLS)和“艾科爾斯”改進型光學助降系統(Improved Carrier Optical Landing System, ICOLS)等[6]。

圖3 早期著艦信號官Fig.3 Early landing signal officer

圖4 現代著艦信號官Fig.4 Modern landing signal officer

圖5 菲涅爾光學助降裝置[13]Fig.5 Fresnel lens optical landing system[13]

圖6 艦載精密跟蹤測量雷達[6]Fig.6 Shipboard precise tracking and measuring radar[6]
早期人工著艦主要依賴于經過嚴格著艦訓練的飛行員在著艦信號官的協助下實現著艦,事故率比陸基飛機約高3~6倍,而著艦失敗率又占總失誤率的85%,其中黑夜又比白天大2倍;而現代作戰多在夜間行動,時段限制和不利氣象往往是作戰的最佳時機。
2.2 等角下滑著艦軌跡控制及動力補償技術
1) 等角下滑著艦軌跡控制技術
隨著艦載機著艦速度的增加,為了提高其出動率和生存率,等角下滑著艦技術被引入到艦載機著艦過程中[7]。所謂等角下滑技術,是指在艦載機截獲合適的下滑道后,一直保持下滑航跡角不變,同時保持俯仰角、速度和下沉率不變,直至艦載機與甲板嚙合為止,實現撞擊式著艦,如圖7[16]所示。

圖7 等角下滑著艦[16]Fig.7 Equiangular glide carrier landing[16]
為了更好地實現等角下滑,在天氣條件較好時,艦載機飛行員可以根據菲涅爾鏡提供的引導信息及時修正航跡高度實現安全著艦;在天氣條件較差時,根據著艦信號官的通信指揮,保證艦載機始終在合理的下滑道上。
另外,艦載機在著艦時必須以較大的迎角飛行,以確保飛機保持合適的下沉率及下滑角。但是如果飛機迎角超過了最大升阻比點所對應的臨界迎角,則飛機將進入速度不穩定區,使得保持飛行軌跡變得十分困難。為了保證飛機的著艦姿態,此時飛行員將同時操縱飛機駕駛桿及油門桿,輔助以方向舵的配合對準跑道,使得飛行員在進場著艦時工作負擔較大,對著艦準確及著艦安全存在較大隱患。
2) 通過進場動力補償實現等角下滑控制
從20世紀60年代初開始,為了減輕飛行員操縱負擔,更好地實現等角下滑,美國海軍在自動著艦系統中開始引入進場動力補償系統(Approach Power Compensator System, APCS),如圖8[18]所示,對發動機推力進行控制,以保持飛機低速穩定性,提高航跡控制精度,更好地保證艦載機等角下滑著艦控制過程[18-20]。使用等角下滑技術的好處在于艦載機在和航母甲板嚙合前最關鍵的20 s內,通過安裝在艦載機上的APCS來自動調節,以調整艦載機的俯仰角、空速、迎角和軌跡角,改善甚至消除艦載機的速度不穩定現象,較好地提高下滑航跡精度。
進場動力補償系統主要用來自動調節艦載機進場時的速度和高度,它的功能是通過自動調節油門,來控制飛機進場速度以保持其恒定值,它已經成為航母/艦載機系統成敗的一項關鍵技術。目前的進場動力補償系統已發展到通過控制油門來保持艦載機著艦過程中迎角恒定。在動力補償系統的幫助下,飛行員只需專注于保持現有的飛行狀態,同時修正由于風和航母運動等擾動造成的航跡偏差,最終在預定的著艦嚙合點,實現安全著艦。等角下滑著艦方式有利于減輕飛行員的負擔,減小進艦與著艦過程中的人為誤差,被認為是著艦技術的一次革命性進步,自出現之后一直使用至今天[21-24]。
圖8 進場動力補償系統[18]Fig.8 Approach power compensator system[18]
進場動力補償的目的是一方面實現速度的穩定,另一方面實現軌跡的跟蹤控制。從控制原理上可分為基于速度恒定的自動油門控制和基于迎角恒定的自動油門控制兩種設計方案。基于速度恒定的自動油門控制以飛機速度為主反饋,自動動力補償算法采用“比例+積分”的形式,實現系統的無靜差控制,同時引入縱向過載nx、迎角α、法向過載ny及俯仰角θ等信息,保證速度調節過程平滑、穩定,如圖9[25]所示(圖中K1、K2、K3表示控制增益,ΔV為速度誤差)。
基于速度恒定的進場動力補償,由于速度反饋軌跡跟蹤響應時間比較長,對于縱桿指令迎角的飛機,速度恒定的進場動力補償控制不能精確跟蹤俯仰姿態角軌跡(存在跟蹤靜差);對于縱桿指令俯仰角速率的飛機,該種自動油門控制方式會取得很好的軌跡跟蹤性能[11]。
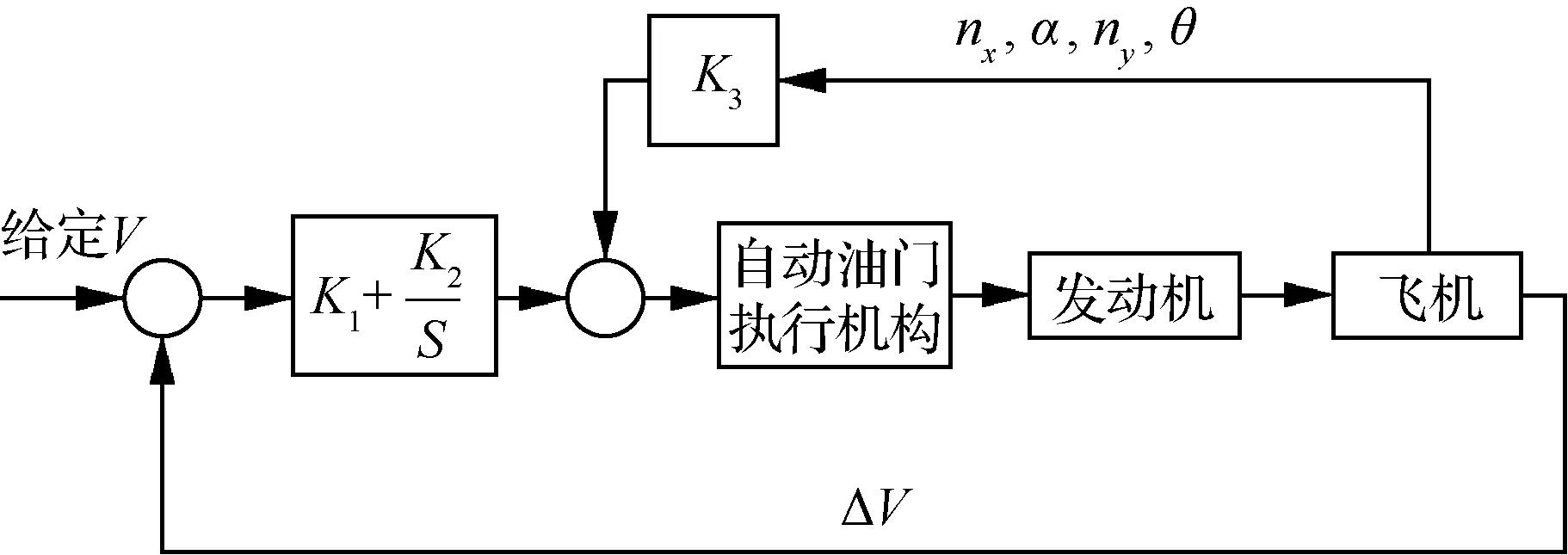
圖9 基于速度恒定的進場動力補償[25]Fig.9 Approach power compensator system based on velocity constant control method[25]
基于迎角恒定的進場動力補償以飛機迎角為主反饋,補償算法同樣采用“比例+積分”的形式,實現系統的無靜差控制,同時引入縱向過載、法向過載、平尾作動量δz及俯仰角等信息,使系統具有較好的動態響應過程,如圖10[25]所示(圖中Δα為迎角誤差)。由于艦載機的鉤眼距是一個定值,如果能夠實現精確控制迎角,只要飛行員操縱飛機進入理想下滑線后啟動自動油門控制,可顯著提高著艦的成功率。
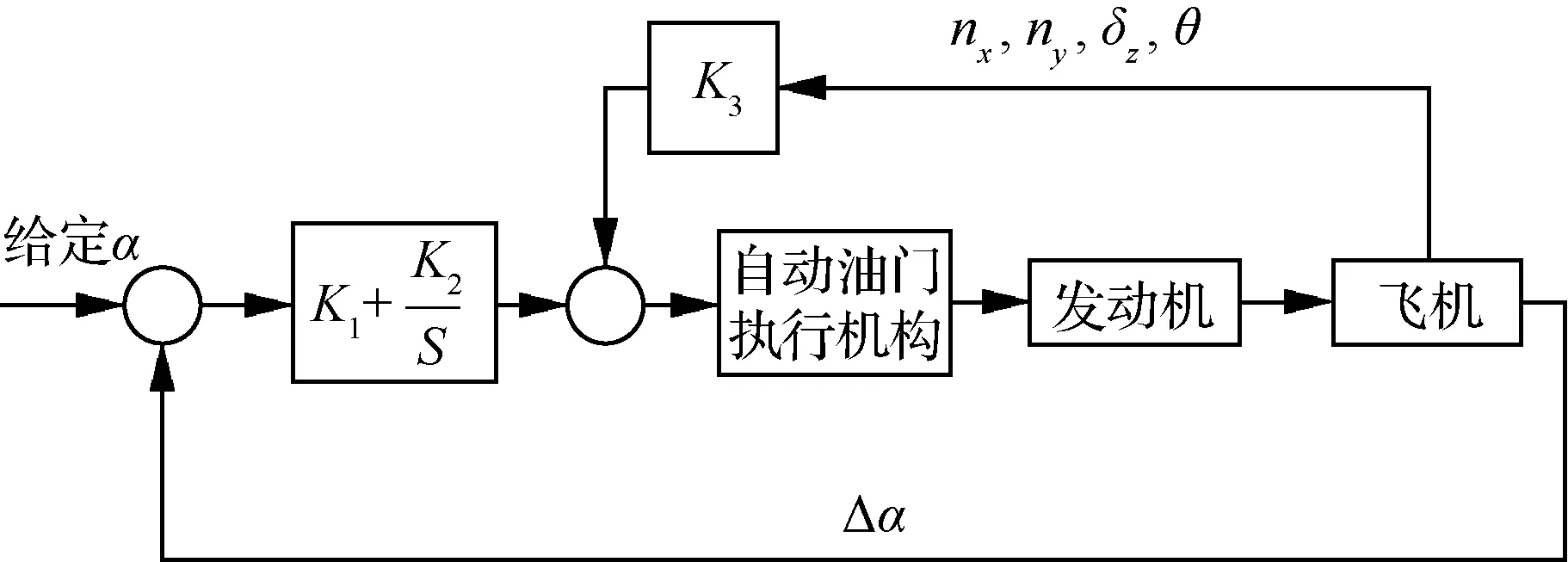
圖10 基于迎角恒定的進場動力補償[25]Fig.10 Approach power compensator system based on angle of attack constant control method[25]
采用動力補償技術后,航跡角Δγ對俯仰姿態角Δθ的響應跟蹤特性顯著改善,如圖11[23]所示(圖中t為時間)。其中曲線1為無動力補償,可以看出Δγ不能有效跟蹤Δθ;曲線2為保持速度恒定的動力補償,響應時間較長且有跟蹤靜差;曲線3為保持迎角恒定的動力補償,響應加快但阻尼不足;曲線4為保持迎角恒定并加入法向加速度反饋控制,航跡跟蹤響應得到了顯著加快,振幅降低很多。
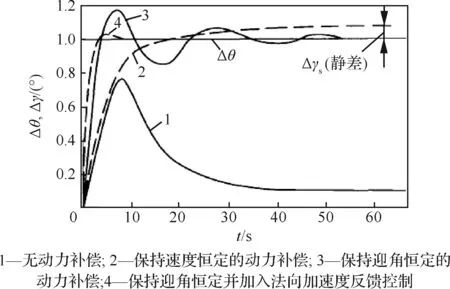
圖11 航跡跟蹤響應[23]Fig.11 Response of flight path tracking[23]
采用進場動力補償技術可以實現對發動機推力的全程自動控制,即減輕了駕駛員的操縱負擔,又有利于實現最佳推力著艦下滑,節省燃油,延長發動機壽命。但是,如圖11中的曲線4所示,為了更好地降低航跡角Δγ對俯仰姿態角Δθ的有效跟蹤性,還需要進一步引入航跡速度或加速度反饋控制。
2.3 甲板運動補償控制
1) 航跡率控制技術
航空母艦艦體前行時,海浪所造成的艦體三自由度偏擺運動及垂直起伏運動,使飛機的預期著艦點變成三維空間上的運動點;除常規大氣紊流擾動外,甲板俯仰所引起的尾流擾動以及艦體前行在尾部出現的雄雞尾式氣流誘發氣流分離,若不對其進行補償控制,僅雄雞尾氣流就可導致39 m的縱向著艦誤差。在大氣干擾、艦尾流和甲板運動等外界干擾條件下,為了更好地實現精確軌跡著艦,提高著艦成功率,需要在進場動力補償的基礎上引入航跡率控制[24,26-30]。文獻[24]在進場動力補償的基礎上采用了升降速率H-dot控制,有效地克服了雄雞尾氣流的影響,用升降舵控制飛機的俯仰角,同時由推力補償系統控制飛機的迎角和速度,這就能在下滑期間保證飛機的速度和航跡角,大大提高了飛機的縱向著艦精度。章衛國等[26]在借鑒文獻[24]的基礎上,基于動力進場補償技術,但不考慮直接升力控制技術,研究了某艦載機的縱向自主著艦控制系統設計與仿真,考慮了海浪引起艦體俯仰與垂直起伏運動,忽略了艦體的偏航與側滾運動的影響,得到飛機實際下降軌跡跟蹤理想下降軌跡的曲線如圖12[26]所示,實際下降軌跡對理想下降軌跡的垂直高度跟蹤誤差(ΔH)曲線如圖13[26]所示,其中橫坐標L表示距離觸艦點的縱向距離。其研究表明采用升降速率控制系統能有效地抑制風干擾;在沒采用直接力控制(Integrated Direct Lift Control,IDLC)的條件下,所設計的飛行/推力綜合控制系統也能有效地抑制風干擾,并能很好地跟蹤艦體運動,縱向著艦精度得到了很好的控制。

圖12 飛機實際下降軌跡與理想下降軌跡曲線[26]Fig.12 Curves of true and ideal landing tracks of aircraft[26]

圖13 實際與理想下降軌跡垂直高度跟蹤誤差曲線[26]Fig.13 Error curve of ideal and true landing track for vertical height [26]
文獻[21]針對F/A-18A自動著艦系統的研究中,采用艦載機垂直速度和垂直加速度作為基準反饋信號(分別通過反饋航跡角和法向過載來實現下滑道的精確跟蹤控制),并稱之為H-dot指令。航跡角反饋是指通過調節艦載機俯仰姿態來改變其航跡,把航跡中垂直速度的變化量引入到反饋控制系統中以體現航跡角的變化量,實現對指令下滑道的精確跟蹤;法向過載反饋是指把垂直加速度引入到反饋控制系統中,以控制航跡。文獻[30]在引入保持迎角恒定的進場動力補償系統控制的基礎上,研究了航跡率控制技術的引入對艦載機縱向階躍擾動控制的影響特性;其研究表明H-dot指令反饋對航跡保持的影響最為顯著,而法向過載反饋的影響最弱。因此,在艦載機進場著艦軌跡精確控制所需的航跡率控制技術中,應優先保證垂直速度反饋。
全天候著艦模態包含4種工作模態:模態Ⅰ(自動著艦引導系統(ACLS))、模態ⅠA、模態Ⅱ(儀表著艦引導系統(ILS))和模態Ⅲ(艦上控制進場系統(CCAS))[6,11]。除了著艦模態Ⅰ外,其他著艦模態若通過改變升降舵偏角改變俯仰姿態角Δθ進而調整航跡角Δγ,將存在跟蹤靜差,從而無法達到降低飛行員操縱負擔的目的;這主要是因為沒有從本質上對航跡與姿態之間所存在的顯著耦合進行解耦,體現在駕駛員操縱負擔上就是“看燈”和“保角”操縱存在耦合。“看燈”需要調整時,其航跡操縱將會引起“保角”中迎角的變化,反之亦然;使得艦載機著艦控制系統設計人員一直在考慮如何對“看燈”和“保角”操縱進行解耦。
2) 直接力控制技術
對于常規飛機的機動,是通過駕駛員操縱平尾產生偏轉,從而改變飛機的迎角,以實現改變飛機的飛行軌跡。直接升力操縱是指駕駛員通過組合的舵面操縱,在不改變全機迎角的情況下,使飛機的總升力產生變化,進而在該升力變化的作用下使飛機的飛行軌跡發生改變[31-32]。因此,直接力控制具有3個技術特點:① 直接力操縱是通過直接控制作用在飛機上的力,而不是控制作用在飛機上的力矩,來改變飛機的軌跡;② 在直接升力控制過程中,飛機的迎角變化較小;③ 直接力操縱要求飛機多個操縱面的組合聯動。
最初采用直接力控制獲得收益的是F-8艦載機,通過偏轉后緣襟翼改變機翼彎度從而達到改變全機升力的目的,以實現精確控制航跡的升降。F-8艦載機駕駛員通過實際操縱,發現采用直接升力控制可顯著地改善航跡保持精度,使得美國海軍在F-14艦載機的設計之初就考慮了直接升力控制技術。F-14戰斗機是機械操縱飛機,其飛行員在著艦飛行訓練時,感受到了直接力控制改善航跡品質的收益,但是以增加飛行員操縱負擔為代價。因為航跡與迎角耦合較嚴,飛行員要操縱縱向操縱桿、油門和新增的IDLC指輪驅動器。當然,在F-18電傳飛機上,IDLC交給飛控計算控制,減少了飛行員操縱負擔[33]。在X-35C驗證機上,取消了IDLC手輪控制器,把襟翼和副翼控制直接升力的操縱交給飛控計算機,作為手動著艦狀態下油門操縱的響應或者是自動著艦狀態下縱向駕駛桿操縱的響應[34]。文獻[16]研究了F/A-18E/F艦載機的直接力控制特性,發現通過后緣襟翼和副翼的偏轉可提供的直接力增減量相當于改變3°的全機迎角所引起的升力變化,并且通過偏轉后緣襟翼控制直接力的增減僅需要0.3 s,遠遠快于通過改變全機迎角來控制全機升力的增減,如圖14[16]所示,圖中CL為升力系數,TEF表示后緣襟翼偏轉角度,Aileron表示副翼作為襟翼使用以產生增升效果時的偏轉角度。
在飛機上可用于操縱直接力的氣動舵面有前緣襟翼、后緣襟翼等,由于這些氣動舵面都距離全機的重心有一段距離,所以直接力操縱面的偏轉都會對飛機產生力矩作用,從而需要對直接力操縱進行力矩補償,一般需要通過微調(襟翼距離重心相對升降舵距離重心非常小)升降舵來配平該力矩。需要注意的是微調升降舵一般交給飛控計算機來執行,不需要飛行員額外的操縱負擔。如此一來,航跡的升降與迎角的保持可以分別來控制,避免了之間的耦合關聯。
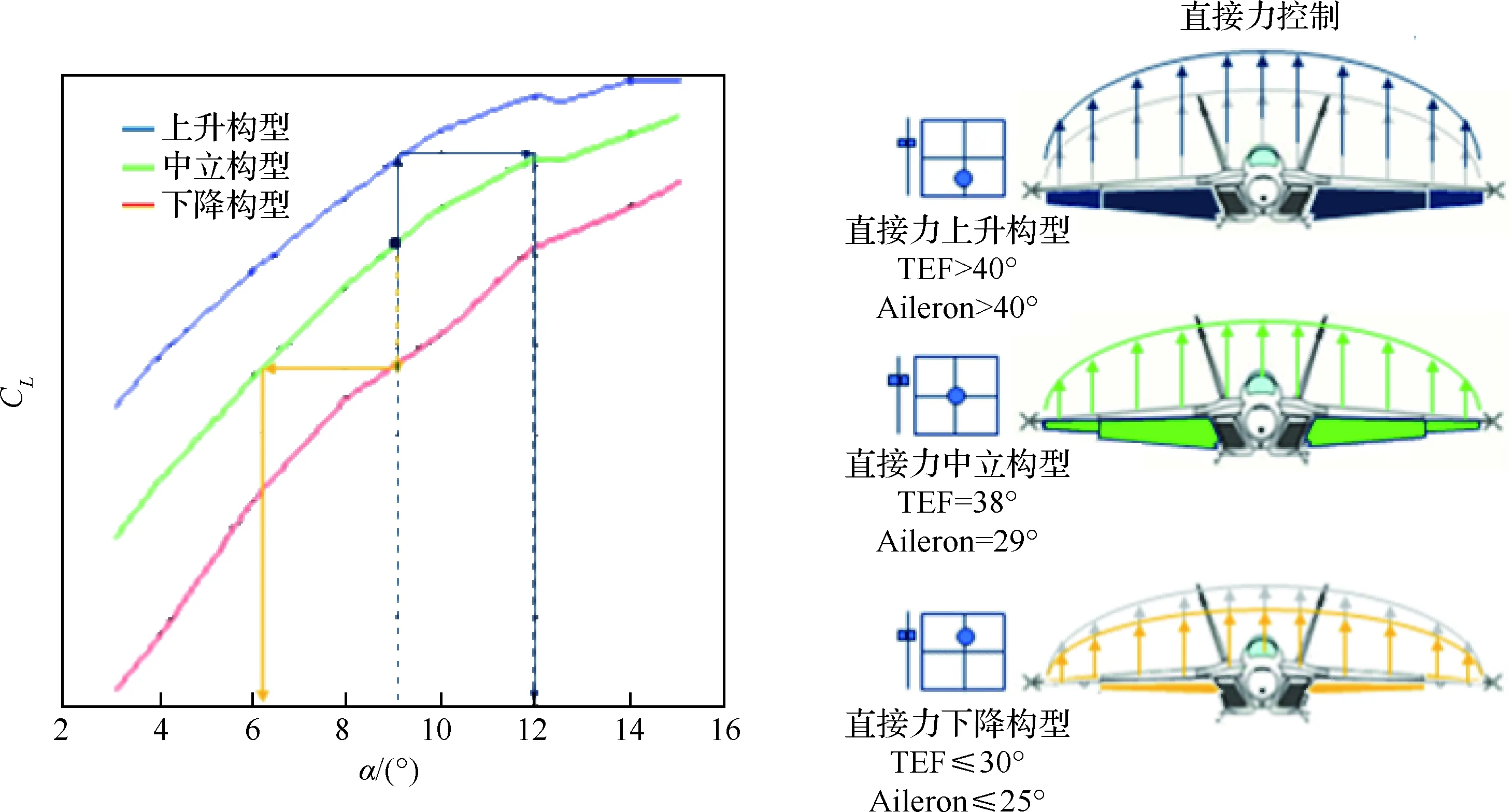
圖14 F/A-18E/F直接力控制[16]Fig.14 Integrated direct lift control for F/A-18E/F[16]
從直接力的控制邏輯可以看出,為了控制航跡的升降以保證等角下滑,不需要通過調整俯仰姿態角Δθ改變全機升力來改變航跡角Δγ,從而在控制邏輯上避免了Δγ對Δθ的跟蹤,實現了“看燈”與“保角”之間的解耦。因此,直接力控制可以改善有人駕駛飛機的性能和操縱品質,減輕駕駛員的工作負擔,并有利于實現著艦過程中的精確控制軌跡。
3) DP(Delta flight Path)控制技術
在艦載機著艦的最后階段,當飛機實際高度與理想下滑軌跡的偏差上偏1.5 m時,攔阻鉤很容易掛空,飛機需要逃逸復飛[35-39]。當飛機實際高度與理想下滑軌跡的偏差下偏1.5 m時,飛機有撞艦危險[40-43]。
航空母艦的運動,平動稱為“蕩”,轉動稱為“搖”,其六自由度運動包括:縱向的垂蕩、縱蕩、縱搖運動;橫向的橫蕩、首搖、橫搖運動。甲板運動將導致艦載機的理想著艦點成為三維空間的運動點,從而增加了著艦難度,甚至導致著艦失敗。為了更加精確地控制著艦軌跡,提高艦載機的著艦成功率,需要在著艦控制系統中考慮甲板運動的影響。
文獻[16]針對F/A-18E/F艦載機研究了DP控制模式,如圖15所示,并通過飛行員模擬著艦,驗證了該技術對提高著艦成功率的影響。
文獻[39]對甲板的側向運動補償進行了研究,進一步完善了DP控制著艦技術。一般將甲板運動或預估信息提前10~13 s加入著艦控制系統,以減少飛行員著艦操縱負擔[6]。因此,在DP控制技術中盡可能多地考慮甲板運動預估及補償,能夠使著艦誤差限制在軍用安全標準規定的范圍內,提高航空母艦艦載飛機武器系統的作戰能力。
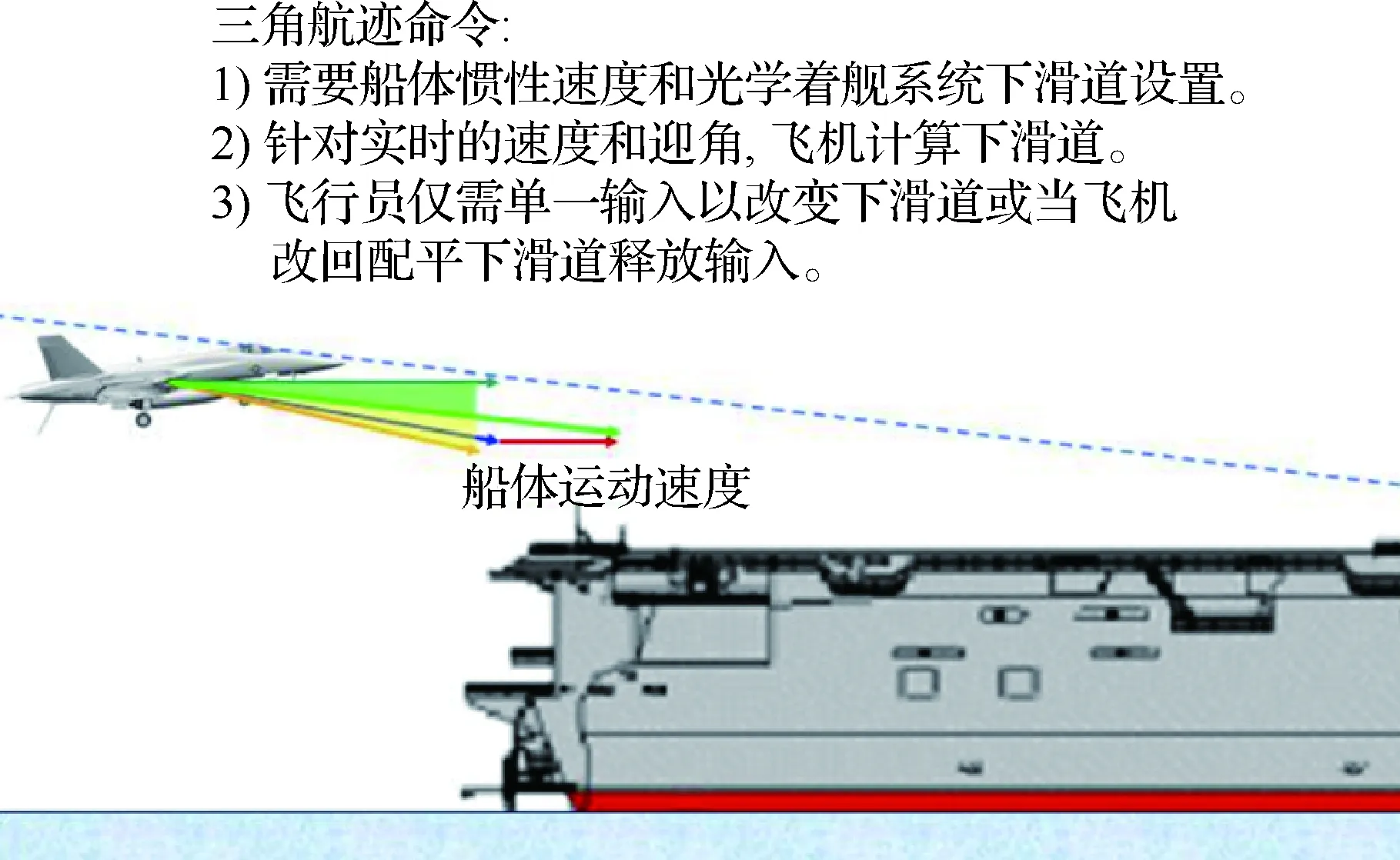
圖15 DP控制模式[16]Fig.15 DP control mode[16]
2.4 平顯增強顯示協助飛行員決策
現代航空母艦一般采用斜角甲板,使得航母航行速度方向與飛機進場速度方向存在一個夾角,當艦載機進入到著艦下滑進近區域后,需要實時操縱方向舵(一般是微調方向舵),從而實現實時“對中”。與縱向解耦需要引入直接升力控制面不同,艦載機進場過程中航向和縱向是天然解耦的。在“對中”策略的整個控制過程中,需要把航空母艦的航行速度通過數據通信鏈反饋到飛機的航向飛行控制系統中,作為外界的擾動,實現“對中”控制的自動化全過程,從而減少飛行員航向操縱的負擔。這一點與自動油門控制著艦技術不需要把航空母艦的航行速度引入到飛控系統中不同,這也解釋了為什么需要把航空母艦的航行速度顯示在平顯上,供駕駛員著艦參考。
另外,為了提高著艦精確性,降低飛行員的操縱負擔,以提高著艦成功率,需要將更多的著艦參考信息,如飛機下沉速度、航空母艦的航行速度等信息顯示在駕駛艙的平顯上,供飛行員著艦操縱參考,最引人注目的是在平顯中引入了下滑道參考線信息,如圖16[16]所示。
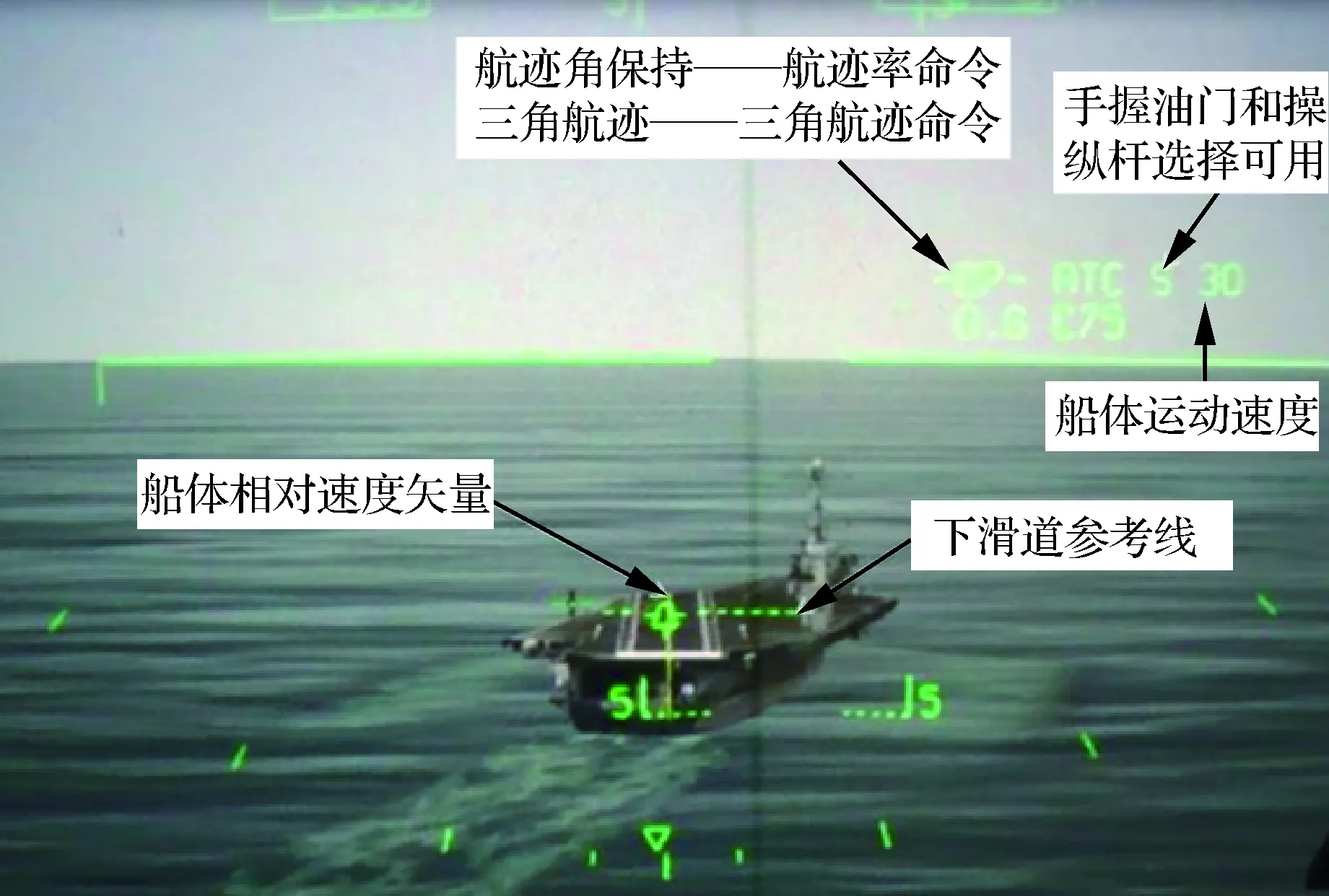
圖16 著艦平顯增強顯示[16]Fig.16 Head-up display symbology for landing[16]
3 艦載機進場著艦引導與控制規范
為了更好地提高艦載機進場著艦軌跡的控制精度,需要對引導與控制技術進行規范化和標準化。美國海軍航空作戰中心飛機處(Naval Air Warfare Center Aircraft Division)的Rudowsky等[31]綜述了艦載機進場著艦標準與規范,主要指標包括著艦速度、飛行品質、油門響應、復飛和逃逸、下滑道轉移機動等性能要求。
3.1 著艦精度影響因素
進場速度將直接影響艦載飛機著艦成功率,進場速度太大,飛行員和系統的響應時間太短,速度太小,飛機容易失速。影響進場速度確定的因素主要有以下幾點:
1) 失速裕度。失速裕度是最古老的艦載機進場要求。一般要求著艦進場速度不能低于1.1Vs(Vs為失速速度)。
2) 縱向加速要求。以最小進場速度Vpamin平飛時,從油門動作到軍用推力位置要有足夠的縱向加速效應,溫度為18 ℃時要在2.5 s內至少達到1.5 m/s2。
3) 變軌機動需求。變軌機動要求體現了飛機高度偏差糾正能力,要求飛機以不超過一半過載能力的升降舵偏度,5 s內可糾正15 m的高度偏差。
4) 品質規范要求。在以進場速度Vpa動力進場過程中,飛機品質必須滿足GJB185—1986有人駕駛飛機(固定翼)飛行品質中關于軍用飛機飛行品質相關要求,對于艦載飛機,必須保證良好的橫滾性能和軌跡穩定性。
5) 視場要求。為了滿足艦載飛機全天候進場著艦能力,在進場著艦過程中,飛行員能夠看到甲板中心線和艦尾,以確保飛行員維持下滑線和良好的對中能力。
3.2 著艦誤差規范
著艦誤差規范是評估著艦軌跡控制精度的依據,文獻[15]對艦載機著艦誤差規范進行了較為詳細的介紹。相對于理想下滑道垂直高度偏差的限制為:① 若誤差上偏轉1.5 m,飛機需逃逸復飛;② 若誤差下偏轉1.5 m,則飛機有撞艦危險。對理想著艦點的平均誤差規范及影響也進行了說明,認為理想著艦點的平均誤差小于3 m,3~7.58 m內認為是可接受的,當著艦誤差大于7.58 m則會產生大量逃逸和短著艦。文獻[42]給出了典型艦載機平均縱向著艦誤差,可供相關設計人員參考,如表1所示。
在著艦試飛驗證中還定義了登艦率為
(1)
式中:η為登艦率;NS為著艦成功次數;Nw為欲著艦次數;Nf為因某些故障不能著艦的次數,某些故障是指:由于甲板堵塞而復飛、產生艦轉動、出現59.264 km/h以上甲板風、出現明顯的飛機故障(如飛控系統、動力補償系統、信標系統故障等)。著艦控制中心故障、著艦工作模態的降級、飛行員接管以及LSO復飛等均包含在欲著艦范圍內。
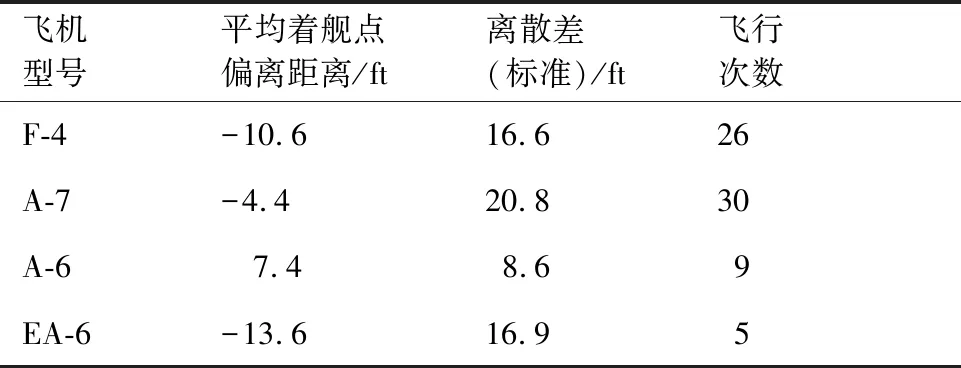
表1 典型艦載機平均縱向著艦誤差
注: 1 ft=0.304 8 m
3.3 著艦引導與飛控系統設計準則
為了提高著艦控制精度及登艦率,文獻[15]以F/A-18飛機的自動著艦引導與控制系統設計背景為例,給出了著艦引導與飛行控制綜合系統的設計準則:
1) 含自動油門動力補償的縱向飛控系統的頻帶應大于1.2 rad/s,以保證制導系統(外回路)的高度軌跡響應及甲板運動補償的動態響應性能。
2) 在氣流擾動下,應盡可能使軌跡誤差減到最小。這是由于隨機陣風與艦尾流是著艦誤差的最大來來源。因此,宜采用有快速抑制氣流擾動的H-dot飛控系統或含直接力控制的飛控系統。
3) 應采取有效的措施,如α-β濾波器使雷達噪聲的影響減到最小,以減少噪聲進入系統,出現舵面激烈振動現象。
4) 抑制結構模態振蕩。主要是因為ACLS自身的高增益易引起舵面作動器的共振。
5) 降低數據處理與數據傳輸的時延,盡可能地避免制導系統中制導律計算及控制信號傳輸時延造成ACLS穩定性下降。
6) 克服構成ACLS綜合系統的各子系統之間可能出現的不利耦合。
7) 采取飛行安全措施,如故障檢測器或指令限制器,使得故障瞬變時能夠隔離故障系統。
由于F/A-18飛機的艦載制導律計算機、數據鏈及機載慣導系統無余度,為了防止部件故障而使ACLS發生激烈的瞬變,其飛控系統還采取幾點措施:① 采用四余度俯仰和滾轉指令限制器,當故障發生時,縱向通道可限制的最大俯仰角速度為3 (°)/s,橫滾通道可限制的最大橫滾角速度為11 (°)/s,如此一來,當飛行員有時間發現不正常狀態,可及時接管飛機;② 迎角大于14°或小于-6°,橫滾角大于70°則由監控器切斷飛控系統;③ 慣導、數據鏈、艦載計算機系統發生故障時,切斷飛控系統;④ 若ACLS軌跡誤差Ze超出允許值,則由ACLS的自動模態轉到手動模態;⑤ 只要飛行員在駕駛桿上施加22.23 N的俯仰桿力或15.56 N的橫向桿力,飛行員在任何時候均可以重獲手動控制權。
4 艦載機進場著艦精確軌跡控制的收益
美國海軍把直接力控制技術、基于進場動力補償的航跡率控制技術、基于甲板運動補償的DP控制技術、平顯增強顯示技術等綜合考慮,開發出適用于艦載機的“魔毯”著艦控制技術[15]。
美國海軍針對F/A-18E/F艦載機邀請了5位 資深駕駛員,分別采用常規的手動控制(M)著艦技術、自動油門(AT)控制著艦技術和基于航跡(FP)控制技術的“魔毯”控制技術進行模擬著艦,并對著艦過程中飛機駕駛員感受到的操縱品質進行打分,結果如圖17[16]所示。圖中綠色區域表示可順利完成預定的著艦任務,黃色區域表示可完成著艦任務但是駕駛員操縱負擔較大或者是完成著艦任務的效果較差,紅色區域表示駕駛員操縱負擔過重或完成著艦任務的效果較差。通過評估結果可以看出, “魔毯”控制技術具有顯著的優勢,可大大減輕駕駛員的著艦操縱負擔。
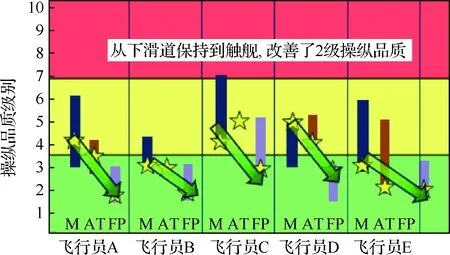
圖17 F/A-18E/F著艦模擬品質評價[16]Fig.17 Evaluation of simulation qualities of F/A-18E/F landing [16]
圖18給出了依次逐步增強控制的F/A-18E/F戰斗機觸艦前20 s進近著艦的4個時域仿真輸入,可以體現出駕駛員的操縱工作量,其中WOW表示觸艦。圖18(a)表示駕駛員人工操縱油門桿和姿態操縱桿進近著艦(圖中1 in=2.54 cm),為了得到期望的著艦精度,需要駕駛員輸入連續的高頻、高幅值的姿態操縱。圖18(b) 是采用自動油門控制著艦輸入響應,油門桿控制交給飛控計算機,駕駛員僅操作姿態操縱桿,從而減少了駕駛員操縱油門的工作量,由輸入響應曲線可以看出,采用自動油門控制技術仍然需要駕駛員輸入與手動著艦類似的連續的高頻、高幅值的姿態操縱。圖18(c)是在自動油門控制技術的基礎上進一步引入FPAH(Flight Path Angle Hold)技術和IDLC控制技術,可以看出姿態操縱的輸入頻率和幅值得到了一定的降低,說明引入該控制技術減輕了駕駛員操縱負擔。圖18(d)是在圖18(c)的基礎上進一步引入DP技術,可以看出駕駛員操縱駕駛桿的操縱量進一步減少,說明大大減輕了駕駛員的操縱負擔,而且航跡角保持響應的速度也更快。
針對F/A-18E/F艦載機和F-35C艦載機,分別采用有資質駕駛員手動著艦(Carrier Qualification landing,CQ)、自動油門控制技術+FPAH、DP控制技術等進行著艦仿真模擬。觸艦點分散度對比如圖19[16]所示。由觸艦對比圖可以看出,采用DP控制技術可以顯著地改善艦載機的觸艦精度。
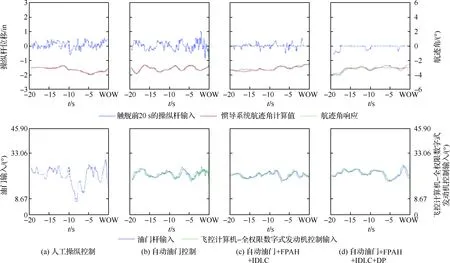
圖18 控制增強對F/A-18E/F著艦模擬輸入的影響[16]Fig.18 Effect of control augmentation on inputs of F/A-18E/F landing simulation[16]
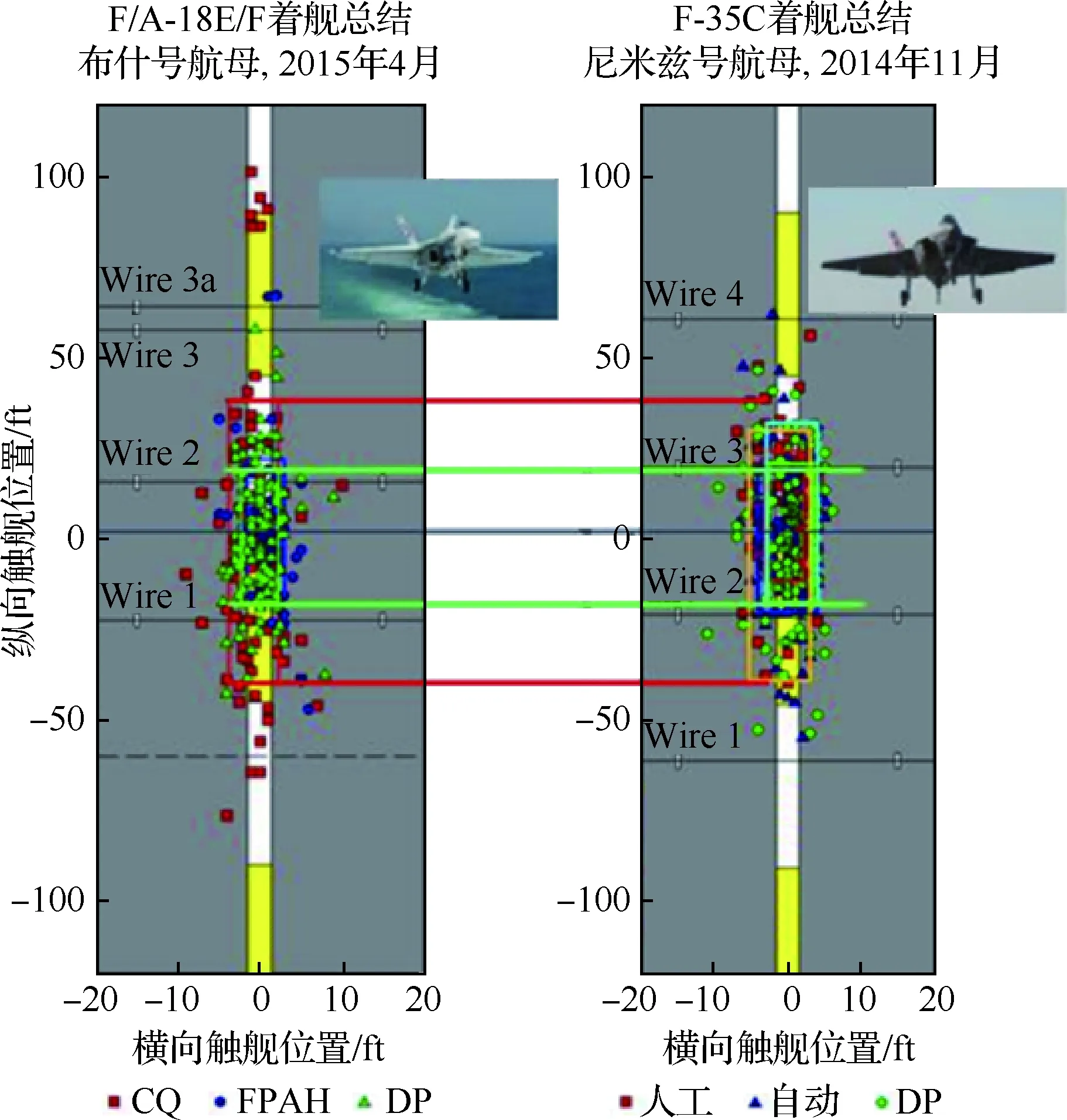
圖19 F/A-18E/F和F-35C觸艦分散度對比[16]Fig.19 Comparison of touchdown dispersions between F/A-18E/F and F-35C[16]
艦載機的壽命和疲勞特性等主要受限于觸艦載荷,而觸艦載荷主要由觸艦法向速度的大小決定。由于艦載飛機在航空母艦上著艦需要采用無平飄著艦方式,所以飛機的下沉速率比岸基飛機大得多。當海上有風浪時,航空母艦有沉浮運動,使艦載飛機的下沉速率進一步增大,有時會達到6 m/s,幾乎是岸基飛機最大允許下沉速率的2倍,所以艦載飛機起落架必須加強,輪胎胎壓也要提高,如F/A-18E/F的艦載型前后輪胎壓分別是岸基型的2.3倍和1.8倍。因此,采用先進的飛行控制技術通過減小觸艦法向速度可以達到減小觸艦載荷的目的,從而進一步降低對起落系統的要求,減輕結構重量。
針對F/A-18E/F艦載機,美國海軍通過艦駕駛員人工操縱著艦,形成了觸艦載荷樣本S-67、S-68、S-71并與FPAH和DP增強控制模式的觸艦法向速度進行了對比,如圖20所示[16]。

圖20 觸艦法向速度對比[16]Fig.20 Comparison of vertical velocity at touchdown[16]
由對比結果可以看出,隨著控制技術的增強,艦載機的觸艦法向速度得到了顯著的削弱,說明了先進飛行控制技術對現代艦載機的著艦可起到顯著的改善作用。據美國海軍報道,采用“魔毯”控制技術(直接升力+航跡率保持+DP+增強平顯)可有效降低觸艦載荷的50%之多,從而顯著地有利于艦載機的機體疲勞壽命。
5 結 論
高精度的進場著艦是艦載機形成戰斗力的重要保障,具有涉及關鍵技術多、系統復雜性高、著艦影響因素多等特點。本文對艦載機人工進場著艦精確軌跡控制技術開展了一定的討論,主要得到以下幾點結論:
1) 現階段,艦載機進場著艦的操縱任務仍然比較繁重,在未來的很長一段時間內,艦載機的精確軌跡控制系統仍需要進一步發展,以承擔更多原本飛行員需要承擔的工作,從而提高著艦精度,減輕飛行員操縱負擔,降低艦載機飛行員培訓費用。
2) 提高艦載機進場著艦軌跡控制的精度,可通過飛控系統全自動操縱替代飛行員的“看燈”、“對中”和“保角”等部分操作工作,有效地降低飛行員操縱負擔,提高著艦成功率。艦載機進場著艦軌跡控制的終極目的是全自動化著艦代替飛行員人工操縱的“看燈”、“對中”和“保角”操縱。
3) 從艦載機人工精確軌跡著艦控制技術的發展趨勢看,直接升力控制技術可以從本質上解決航跡率對姿態的跟蹤靜差較大的難題,并且具有響應速度快、產生的額外俯仰力矩小等特點,是艦載機精確軌跡控制技術進一步發展的主要路線之一,值得相關設計人員進一步加深研究。
4) 通過引入航跡率控制技術對艦載機著艦軌跡進行精確控制,可以有效地減小觸艦點分散度、降低觸艦法向速度進而降低艦載機的觸艦載荷,有利于減輕該類飛機的結構設計重量,值得在艦載機的設計中進一步推廣應用。
5) 從機械式操縱的F-14戰斗機駕駛員使用擾流板、襟翼等以提高著艦精度,到電傳操縱的F-18戰斗機使用進場動力補償技術進一步減輕飛行員操縱負擔,再到F-18戰斗機提出的“魔毯”控制技術提高著艦成功率等,可以看出艦載機精確軌跡著艦與控制對較好的著艦操縱品質有著迫切的需求,是未來艦載機設計需要著重關注的設計點之一。
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
建材發展導向(2019年13期)2019-08-24 06:37:40
當代陜西(2019年11期)2019-06-24 03:40:28
電子制作(2019年7期)2019-04-25 13:16:50
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
上海大中型電機(2017年4期)2017-02-06 05:27:06
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
照明工程學報(2016年3期)2016-06-01 12:17:56