基于交通信號擁塞控制的智能交通系統研究
2019-04-23 03:29:52
微型電腦應用 2019年2期
關鍵詞:系統
(陜西國際商貿學院 信息工程學院,西安 712046)
0 引言
在現代生活中,交通問題成為了公民日常生活不得不面對的困難,如交通擁堵、交通堵塞、交通事故、車輛的碰撞、違反交通信號燈等問題常影響著人們的日常生活。據研究,高容量的車輛、基礎設施不足和不合理分布的開發是增加交通堵塞的主要原因。造成交通擁堵的主要原因是由于人口和經濟的發展造成的車輛數量過多,交通堵塞是道路網絡在使用增加時發生的一種狀況,其特征是速度變慢、交通時間變長、車輛排隊增多。最常見的例子是車輛實際使用道路,當交通需求大到車輛之間的相互作用減慢了交通流的速度時,就會造成一定程度的交通堵塞;當車輛完全停車一段時間時,這通常被稱為交通堵塞,交通信號或交叉口發生碰撞是重要的道路問題[1-4]。本文旨在根據城市面臨的道路交通問題,設計一種交通信號燈智能化控制策略,解決城市交通擁塞等問題,實現智能化交通應用。
國際公路聯合會(IRF)資料記載,交通控制系統交通燈控制系統于1868年在倫敦安裝。自1868年以來,它已經進行了微小的主要/次要變化,但其仍然不是動態的,因為它的靜態行為無法處理動態業務的需求。交通管制在生活中起著重要的作用,為解決交通問題,相關學者及進行了大量的研究,需要相關有效的管理技術實現智能化控制。在交通環境中,交通標志識別(Traffic Sign Recognition,TSR)用于調節交通標志,警告駕駛員,以及命令或禁止某些動作。快速實時和強大的自動交通標志檢測和識別可以支持和減輕駕駛員的負擔,從而顯著提高駕駛安全性和舒適性。通常,交通標志為駕駛員提供安全和有效導航的各種信息,因此,交通標志的自動識別對于自動智能駕駛車輛或駕駛員輔助系統是重要的。然而,關于各種自然背景觀察條件的交通標志的識別仍然是具有挑戰性的任務,基于實時自動視覺的交通燈控制最近引起了許多研究人員的興趣,因為主要交叉點的交通堵塞頻繁,導致浪費時間。因此,給定視頻序列,基于視覺的交通燈控制列表的任務:1)分析圖像序列;2)估計交通擁堵;3)預測下一個交通燈間隔。研究人員可以關注這些任務中的一個或多個,他們也可以選擇不同的交通結構測量方法,或者增加措施,對基于視覺的交通燈控制進行更全面的審查。
1 系統設計
基于交通信號擁塞控制的智能交通系統以實現智能化交通控制為目標,以多種傳感設備(RFID、攝像機等)作為信息采集手段,采用無線接入的方式上傳服務端,并通過智能控制算法計算獲取各信號燈的信號輸出結果,完成智能化交通流量控制。本節主要對硬件組成、系統總體架構以及具體測量策略進行了介紹。
1.1 研究動機
以下是這種智能交通系統的一些動機[5-6]。
1.減少交通擁堵;
2.避免交通信號違規;
3.遵守相關交規紀律;
4.減少交警的工作量。
5.在RFID閱讀器和標簽之間建立安全連接。
6.減少道路交通事故。
1.2 硬件組成
在該系統中,使用的是ATmega328 8位AVR微控制器。它是一款基于AVR增強型RISC架構的低功耗CMOS 8位微控制器。通過在單個時鐘周期內執行強大的指令,ATmega328實現了接近1MIPS/MHz的吞吐量。該配置使系統能夠優化設備的功耗與處理速度。ATmega328/P具有以下特性:32K字節的系統內可編程閃存,具有讀寫能力,1K字節EEPROM,2K字節SRAM,23條通用I/O線,32個通用工作寄存器,實時計數器(RTC),3個靈活的定時器/計數器,1個串行可編程USART,1個字節的2線串行接口(I2C),6通道10位ADC(8通道TQFP和QFN / MLF封裝),可編程看門狗定時器,內置振蕩器,SPI串行端口和6種軟件可選擇的省電模式,以下是微控制器的示意如圖1所示。
ATmega328微控制器的引腳配置圖,如圖2所示。
1.3 系統架構
在系統架構設計中,攝像機位于信號的頂部,以便清晰地看到信號特定側的交通狀況,從而捕獲圖像并分析該特定側的交通并獲得車輛數量的計數,通過該計數,將確定該特定側的密度并提供相應的信號,系統組成架構圖[7-10],如圖3所示。
1.4 車輛密度測量介紹
智能交通信號燈控制策略的研究的主要算法實現是以車輛密度測量為主,測量算法如圖4所示。
(1) 系統圖片來源
在該系統中,源圖像是RGB圖像,其可以由用戶給出以獲得輪廓圖像和輸出屏幕中的車輛計數,如圖5所示。
(2) 灰度圖像
灰度圖像可用于以黑白格式顯示對象。在此系統中,輸出將僅在獲取源圖像后顯示灰度圖像,因為源圖像僅轉換為灰度圖像,如圖6所示。

圖1 微控制器板
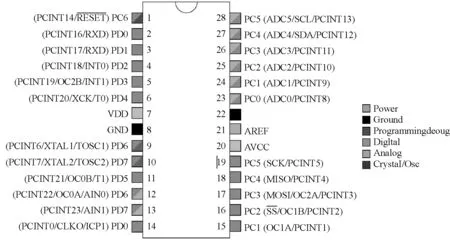
圖2 引腳配置
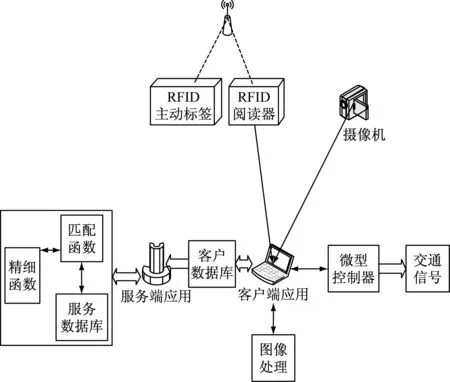
圖3 系統架構圖
(3) 閾值圖像
閾值圖像亮度或灰度圖像的對比度,在該系統中,可將灰度圖像轉換為閾值圖像,如圖7所示。
(4) 圖象檢測
Canny圖像是一種邊緣檢測圖像,能夠對物體邊緣進行輪廓處理,它可以幫助充分找到識別對象。閾值圖像轉換為Canny圖像結果構圖,如圖8所示。
(5) 圖像腐蝕
腐蝕圖像也像圖像檢測一樣,它可以用來找到暗線的邊緣。在該系統中,車輛的邊緣被黑線探測到,在將Canny圖像轉化為腐蝕圖像之前,Canny圖像將被破壞,如圖9所示。

圖4 測量算法

圖5 圖像來源圖

圖6 圖像灰度處理圖

圖7 閾值圖像處理圖
(6) 圖像輪廓
在顯示車輛計數和輸出畫面之前,將腐蝕圖像轉換為等高線圖像,該圖片是找到車輛計數和輸出屏幕的最后一步,如圖10所示。
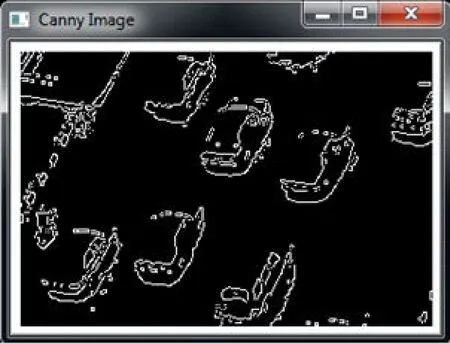
圖8 圖像檢測結果圖

圖9 圖像腐蝕結果圖

圖10 圖像輪廓處理結果圖
(7) 結果輸出
該系統通過兩種模式進行結果顯示,分別描述如下:
1) 輸出畫面顯示輸出圖像,在這個圖像將顯示原始的RGB圖像,在這個屏幕上,車輛通過“裝箱”模式劃分出來,以便于計數。
2) 另一個輸出屏幕是命令提示符。在此命令提示符將打開時,用戶運行本系統,在最后階段得到輸出圖像后,命令提示符將顯示車輛計數。如圖11所示。
2 總結
本文通過在交通信號處捕捉圖像并應用圖像處理的概念,在車輛上環繞一個圓圈并計算車輛的數量,通過圖像處理的方式實現對原始拍攝圖片信息的處理。介紹了所用的微控制器的組成及引腳設置,并通過7步進行了圖像信息的灰度、輪廓等處理,從而獲取最終的車輛數量信息。

圖11 結果輸出界面
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
