基于布谷鳥算法的無人機不規則作業區域的航跡規劃研究
2019-04-23 03:29:54,,
微型電腦應用 2019年2期
關鍵詞:規劃
, ,
(深圳供電局有限公司,深圳 518000)
0 引言
隨著計算控制技術、信息技術以及圖像處理技術的快速發展,無人機(Unmanned Air Vehicle,UAV)被廣泛地用于地質測繪、巡線、智能安防以及植物保護等領域[1-2],無人機實物圖如圖1所示。

圖1 無人機實物圖
無人機航跡規劃是指在綜合考慮多影響因素的環境下,為滿足實際需要而規劃出的最優飛行軌跡路線[3]。無人機在執行任務之前,首先離線規劃出參考航跡,之后隨著飛行,結合實際探測信息和周圍環境,根據需要,快速規劃出新的飛行航跡。傳統的UAV航跡規劃方法存在實時性差、路線容易偏離等缺點,本文以UAV的不規則航跡規劃為研究對象,建立基于布谷鳥算法的無人機不規則作業區域航跡規劃研究,實現UAV航跡的實時規劃和威脅目標的規避,效果較好。
1 布谷鳥算法
布谷鳥算法[4](Cuckoo Search Algorithm,CSA)是受布谷鳥種群寄宿繁殖行為啟發而提出的一種新的群智能搜索算法。該算法假設如下:
(1)布谷鳥一次只下一個蛋,并且隨機放在一個鳥巢中孵化;
(2)一部分布谷鳥的鳥巢存放優質蛋,存放優質蛋的布谷鳥鳥巢將被保存到下一代;
(3)布谷鳥蛋被寄主鳥發現,其將丟棄鳥巢或鳥蛋,尋找新的布谷鳥鳥巢,避免影響優化解的尋找。

⊕L(λ)(i=1,2,…,n)
(1)
其中,?表示步長控制量;xb表示布谷鳥的當前最優位置;⊕表示點對點乘法;L(λ)表示布谷鳥的隨機搜索路徑,其服從Levy概率分布[5-6]如式(2)。
Levy~u=t-λ1<λ≤3
(2)
2 無人機航跡規劃數學模型
2.1 目標函數
在多約束條件下,為保證無人機航跡規劃路徑最短,本文選擇適應度函數式(3)作為目標函數[7]。
Fitness(xi)=q1·f_apag(xi)+q2·f_plag(xi)+
q3·f_Rsw(xi)+q4·f_L(xi)+
q5·f_height(xi)+q6·f_close(xi)
(3)
其中,q1、q2、q3、q4、q5和q6分別表示垂直方向轉彎角、水平方向轉彎角、轉彎半徑、飛行距離、飛行高度和航向的權值系數。
2.2 約束條件
(1)UAV在垂直方向上的最大轉彎角約束條件[7]如式(4)。
(4)
其中,θmax表示UAV在垂直方向上的最大轉彎角度,轉彎角度示意圖如圖2所示。

圖2 UAV轉彎角度示意圖
(2)UAV在水平方向上的最大轉彎角約束條件[7]如式(5)。
(5)
其中,φmax表示UAV在水平方向上的最大轉彎角度。
(3)UAV的最小轉彎半徑約束條件[8],如式(6)。
(6)
其中,Rsw、Rmin分別表示UAV的轉彎半徑和其固有的最小轉彎半徑。
(4)UAV飛行距離約束條件[8-9]:為保證UAV完成任務和返航,UAV飛行距離應限制在一個最遠距離Lmax內,如式(7)。
(7)

(5)UAV最低飛行高度約束條件[8-10]:無人機安全飛行的所保證的最低飛行高度Hmin。由UAV高度示意圖(圖3)可知式(8)。
(8)
其中,hk表示UAV的當前飛行高度;Hmax和Hmin分別表示UAV的最大和最小飛行高度,如圖3所示。

圖3 UAV航跡高度示意圖
(6)UAV航向約束條件[8-10]:UAV航跡規劃時,其每迭代計算一步應不斷逼近目標點,因此航向應滿足式(9)。
(9)
其中,li表示目標點G和待選航跡節點C的距離,l表示目標點G和當前航跡節點B之間的距離。其示意圖如4所示。

圖4 UAV航向關系示意圖
3 基于CSA的無人機航跡規劃
UAV在執行飛行任務之前,先通過離線規劃出無人機一條最優飛行路線。當無人機執行任務的時候,無人機將根據自身偵測設備和控制中心所接收到的環境探測信息,無人機進行信息評估,根據信息評估結果作出決策是否避開危險目標,從而規劃出一條新的航跡路線[11]。基于CSA的無人機航跡規劃流程圖如圖5所示,其算法流程如下:
Step1:建立無人機航跡規劃數學空間模型和威脅目標位置信息[12];
Step2:初始化CSA算法參數:CSA算法的種群大小為size,迭代次數為N,最大最小步長分別為?max,?min;

Step 4:根據公式(1)和公式(2)計算Levy飛行步長,并更新其他布谷鳥鳥巢的位置,獲取新的布谷鳥鳥巢位置,并計算新的布谷鳥鳥巢位置的適應度Fitness;

Step 6:若gen>N,保存最優解;反之gen=gen+1,轉到Step3;
基于上述算法流程,CSA算法能夠找到UAV航跡規劃路徑的一條最優航跡,如圖5所示。
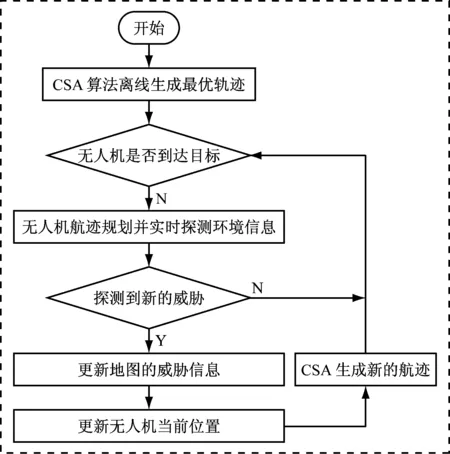
圖5 基于CSA算法的UAV航跡規劃流程圖
4 仿真試驗
為了驗證本文算法的有效性和可靠性,假設UAV在飛行50 km之后在其飛行空間內發現一中心坐標(60,60,0),防空導彈陣地的作戰半徑為10 km,無人機的最大規劃時間tmax=15 s,UAV當前飛行速度為V飛,開始重新規劃航跡,最大規劃時間tmax之后,UAV開始重新規劃航跡,目標函數的約束權值系數分別為q1=0.1,q2=0.1,q3=q4=q5=q6=0.2。UAV初始規劃和發現威脅的空間三維圖分別如圖6和圖7所示。

圖6 初始規劃空間

圖7 發現威脅的規劃空間
UAV發現威脅之后,受攻擊之前,其正好經過參考航跡空間,因此需進行航跡重新規劃。假設無人機的出發位置坐標為(0,0,0),目標位置坐標為(100,100,0),其離線規劃的參考航跡和重新規劃航跡分別如圖8和圖9所示。

圖8 參考航跡

圖9 重新規劃航跡
圖8和圖9中紅色曲線表示UAV離線規劃的參考航跡,藍色曲線表示CSA重新規劃出的飛行航跡。當UAV探測到威脅目標位于參考航跡空間內時,UAV開始重新規劃航跡,避開威脅目標,在飛行最大規劃時間tmax,無人機將繼續沿著離線規劃的航跡路線飛行。CSA規避威脅目標重新規劃航跡的時間為2.35 s,實時性較好,能夠滿足UAV的不規則作業區域的航跡規劃需要。
為了進一步說明,CSA進行UAV航跡規劃的實時性和可靠性,假設無人機的出發位置坐標為(5,5,0),目標位置坐標為(95,95,0),其離線規劃的參考航跡和重新規劃航跡分別如圖10和圖11所示。

圖10 參考航跡
通過圖10和圖11可知,通過更換目標位置和出發位置,CSA算法進行航跡規劃,可以有效避開威脅目標,規劃出新的航跡,規劃時間僅1.91 s,實時性好,滿足航跡規劃的實時性要求,可以推廣應用。

圖11 重新規劃航跡
5 總結
針對傳統的UAV航跡規劃方法存在實時性差、路線容易偏離等缺點,以UAV的不規則航跡規劃為研究對象,在保證無人機航跡規劃路徑最短的情況下,綜合考慮垂直方向轉彎角、水平方向轉彎角、轉彎半徑、飛行距離、飛行高度和航向等約束條件,提出一種基于布谷鳥算法的無人機不規則作業區域航跡規劃方法。仿真試驗結果表明,提出的算法可以有效規避威脅目標,并重新規劃出航跡路線,具有很好的實時性,能夠滿足實際路線規劃要。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
