一種仿人直立行走機器人的結構設計研究
2019-04-25 02:45:38倪笑宇馬晨園王占英耿明超胡一龍
微特電機 2019年4期
倪笑宇,馬晨園,王占英,耿明超,胡一龍
(河北建筑工程學院,張家口 075000)
0 引 言
仿人機器人的研制開始于20世紀60年代,雖然只有五十多年的歷史,但研究工作發展迅速,特別是近十年,隨著各種新技術的快速發展,世界各國在這一領域的研究取得了長足進步[1-2]。我國在仿人機器人的研究方面起步較晚,整體技術很大一部分依靠國外引進,但近些年也取得了很多研究成果,從四自由度到六自由度,從步態模擬到交叉足步,機器人的仿生已然成熟[3-6]。而本設計在滿足機器人基本行動要求的前提下,保持自由度數目不變,減少電機個數,進一步改進結構形式,采用直流電動機驅動,提高自由度利用率與整體強度,提升機器人的實用性。
1 雙足行走步態規劃
該設計仿人機器人采用單、雙腳交替支撐的方式步行,整個動作的順序是機器人左胯—左腳—偏心—右胯—右腳循環執行,如圖1所示。要實現穩定的步行,必須規劃出合理的步態,并能夠很好地調節重心。目前,比較成熟的步態規劃方法[7-9],主要有基于仿生運動學的步態規劃方法、基于模型的步態規劃方法等,本文不再贅述。
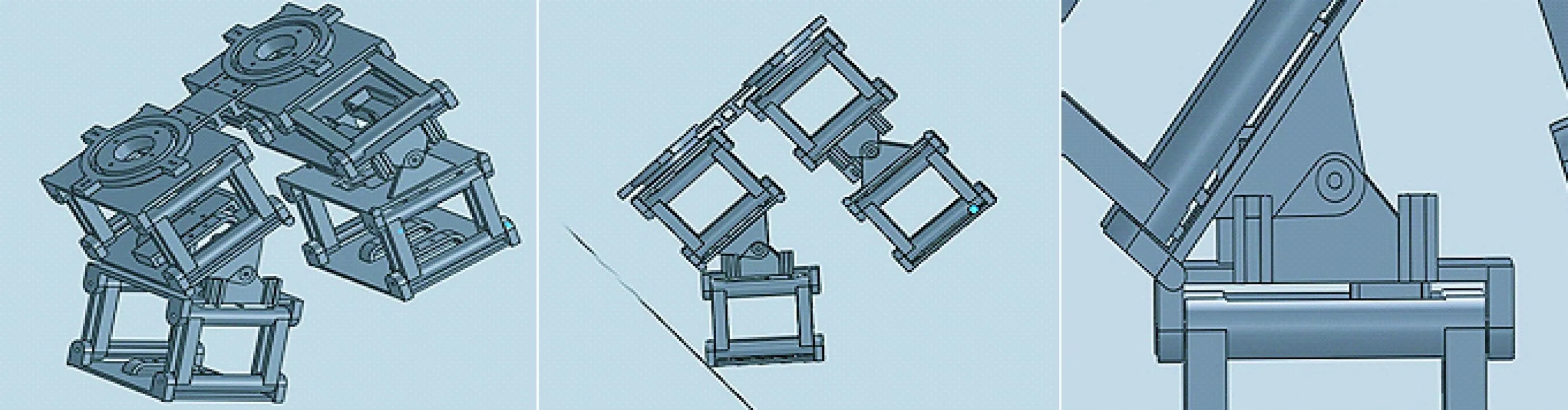
圖1 雙足偏心行走示意圖
2 機械結構設計
該設計在滿足機器人基本步行要求的前提下,改變結構、減少電機、提升負載。該種機器人結構主要包括并聯平行四桿型腿部肢干機構、行星輪型偏心機構和不完全齒式轉體機構。
2.1 腿部肢干機構設計
目前,常見的六自由度仿人機器人其主要驅動件為舵機,同時結合肢干構件組成懸臂梁型旋轉副,從腳踝到膝蓋共需要兩個電機來實現一個小腿(膝蓋到腰胯則對應一個大腿)的前后運動[10-11]。這種組合普遍應用于小規模表演機器人,靈活性強,可塑性強,但在實用開發方向上有局限性:舵機為高度集成化的驅動件,集電機、減速箱、硬件電路板于一體,精度較高,但體積較小,承受負載能力較差,在機構設計上無法同時滿足高負載能力與高精度雙重要求,一旦負載加重,極有可能造成舵機內部零件的損毀。而要開發具有一定實用價值的機器人,負載能力是首先要考慮的,故以舵機為主要驅動件的運動副不是理想運動副。
因此,設計一種以直流電動機為驅動件的旋轉副,配合限位開關作為復位坐標定位,發揮舵機部分反饋功能,配合平行四桿機構作為肢干構件且搭以行星輪一級減速作為中間傳動,在滿足基本步行的要求下,彌補了舵機驅動旋轉副的不足。
直流電動機中的渦輪蝸桿減速電機具有斷電自鎖特性,故可以做到無功耗的狀態保持,在項目長期作業中,需要這一特性來開展其他工作。同時,避免了電機直接與運動構件相連,故不存在舵機懸臂連接所帶來的同軸度偏差,而一級減速輸出軸兩端固定,可以均衡負載,使得承載能力大大提高。
該機器人肢干結構為兩個并聯的平行四桿機構,其中上下兩桿為平板狀。這樣設計的目的是為了均衡力矩,將局部力矩轉化為均布載荷,提高肢干負載能力,但運動特性與單個平行四桿機構是一致的。平行四桿符合人類行走時身體在邁收步中腳掌保持平行的關系,與舵機驅動相比,完成同樣的動作卻少用一個電機,一方面降低了制造成本和功耗,另一方面用機械結構代替腳踝電機與膝蓋電機的配合關系,大大提高了動作吻合度,消除了負載對電機的徑向力,減輕了電機的負擔,大大增強了機器人的負載能力。綜上所述,平行四桿在高強度、高精度、動作靈活性要求較低的環境下擁有其他機構不可比擬的優勢。
平行四桿具有承載能力強、上下桿始終保持平行的優良特性,但若想精確控制其上下桿錯位位移,的確不同于解決常規錯位問題那樣簡單。通常,齒輪齒條配合可以實現兩者之間的相對運動,但只限于一個方向,而對于平行四桿中上下桿的相對運動,其在X及Y方向均有位移,這不是簡單的齒輪齒條所能解決的了。有人提出用齒輪齒條結合滑塊實現高低副搭配來解決,高副負責X方向,低副負責Y方向,如此設計的確解決了問題,但并不是最佳。原因是平行四桿機構雖然在運動路線上處于雙向,但其路線特征體現的是一個自由度的運動曲線,高低副搭配實則擁有兩個自由度,自由度越多,靈活性越強,但其結構復雜,加強筋少,用兩個自由度的運動副代替一個自由度的運動副,只能保證正常工作,但在剛度等其他力學性能上卻不能滿足需要。
其實,一個自由度的運動路徑可能千變萬化,但其運動方式卻是單調的,把解決這個問題的出發點放在一個自由度的基礎上來思考:平行四桿上下桿運動是由兩側搖桿驅動的,而搖桿與下桿僅為一個旋轉副,故上下桿相對運動路徑為一段圓弧,由此,便設計了行星輪組合,如圖2所示。只要令太陽輪所在分度圓圓心與雙搖桿旋轉中心的中點重合即可,行星輪與上桿為一個構件,如此便實現了上下桿的行星運動,主動輪圍繞從動輪做行星運動,其運動軌跡與四桿中的曲柄運動軌跡形成一對同心圓,可以實現實時控制的平行運動,且可以隨時鎖定。在受力方面,僅存在一個高副,沒有懸臂力矩,故行星輪組合實現平行四桿上下運動最佳。
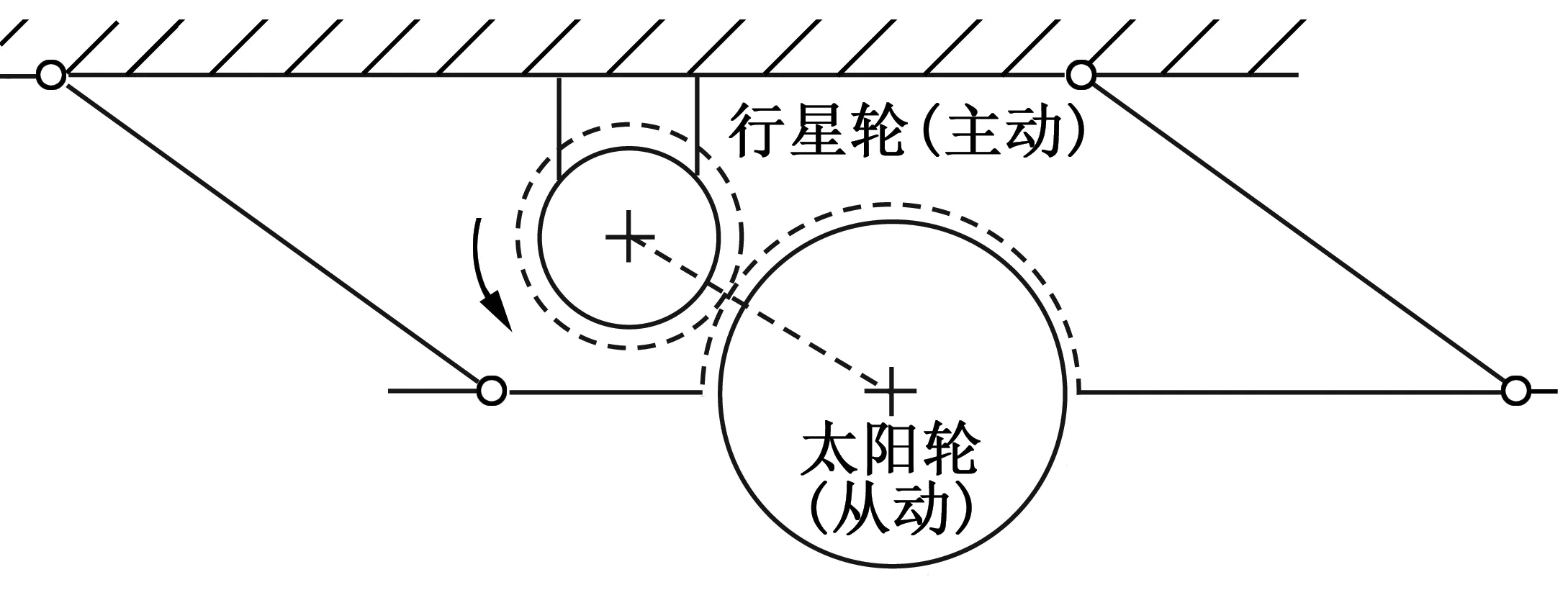
圖2 平行四桿型肢干結構
2.2 偏心機構設計
偏心機構是所有步行機器人最為重要的轉移重心機構,在設計上要充分考慮其負載能力、尺寸大小、安裝位置,且三個指標互相影響。首先要選用減速比大的渦輪蝸桿電機;其次要盡量縮小機構尺寸。普通舵機機器人一般繼續沿用其自身的肢干旋轉副,結構簡單,但只限于質量較小的表演型機器人,一旦負載加重,超出減速箱負載能力,極有可能造成崩齒;普通減速為正齒輪嚙合,構件通過其連接之后會增大偏心力矩,給電機帶來額外的負載,這顯然不符合壓縮偏心機構對負載的要求。
針對以上兩種情況,我們設計了一種以行星輪減速,中間加以防抱死齒輪的偏心機構,如圖3所示。不完全內齒輪作為太陽輪,電機驅動輪作為行星輪,大大減小了負載力矩。普通正齒輪嚙合所承受的負載力矩為主動輪分度圓半徑加從動輪分度圓直徑,徑向矢量大,負載力矩大;內齒輪與主動輪相結合則徑向矢量為內齒輪分度圓半徑減去主動輪分度半徑的絕對值,顯然差要小于和,故在一定程度上壓縮了空間,縮小了負載對偏心電機的力矩。
圖3 行星輪型偏心結構
加入防抱死齒輪,負載超過額定載荷時,機構產生打滑,保護內部零件。這里真正起到防抱死作用的是支撐防抱死齒輪的支撐桿,由于材料與機架不同,故其具有一定彈性。當負載加重時,電機輸出扭矩不足以帶動整個機構,其上齒輪開始調節與主動輪及內齒輪的嚙合關系,最終被主動輪“擠出”,產生打滑現象,避免了電機內部的抱死,防止燒壞電機。
2.3 轉體機構設計
機器人轉體結構分為交叉步轉體和直接轉體。對于小型機器人,可以不增設轉體機構自由度,直接編寫一套交叉步轉體程序即可實現。然而對于大型機器人或對轉體精度有較高要求的機器人,交叉步轉體精度差的問題便會放大,故必須增設一個新的轉體機構來實現精確轉體。常規方法為雙電機控制,且各自協調,分時運動,可行性高,唯一缺點就是多使用了一個電機。我們分析一下轉體過程,以向左轉為例:左偏心—右肢內旋—偏心歸位—右偏心—左體后旋(右肢外旋),走完這一流程,機器人整體以左腳為圓心,整體逆時針旋體,調整前進方向為左前,過程雖然稍微復雜,但對于右肢內旋和左體后旋來說,這兩個過程分時且二者在空間上沒有任何干涉,運動特征為單調,因此可以用一個電機來實現轉體運動,具體結構如圖4所示。虛線表示分度圓,實線表示齒根圓,其中主動輪為不完全齒,目的是在與其中一個齒輪嚙合的同時,與另外一個齒輪脫離;每個從動輪均加以扭簧復位,其上方分布有限位開關,二者相輔相成,當所在從動輪脫離主動輪后,可以使其保持一定程度的靜止狀態。如此設計最大的特點是節省一個電機,方便調試,節約成本,并且將其載荷置中,一定程度地減小了帶給偏心機構的壓力。
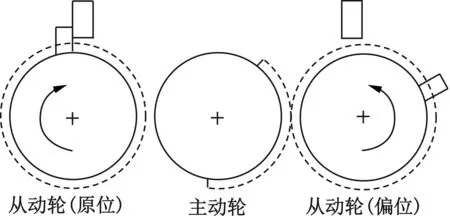
圖4 轉體機構圖解
3 結 語
試制仿人步行機器人原理樣機,如圖5、圖6所示。該原理樣機外形結構采用3D打印完成,質量輕,成本低。運行結果表明,該機器人步態平穩、結構設計合理、負載能力強、精度較高。
本文針對仿人步行機器人機械結構設計進行研究,開發出一種新型結構的步行機器人,主要包括行星輪式平行四桿肢干機構、行星輪式偏心結構和不完全齒式的轉體機構。機器人采用渦輪蝸桿直流電動機進行驅動,其驅動能力和承受負載能力遠遠高于常見的舵機,在大型機器人以及對負載能力要求較高的機器人中具有優勢。
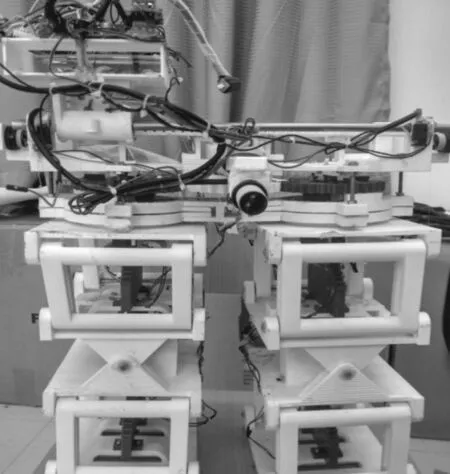
圖5 仿人步行機器人原理樣機
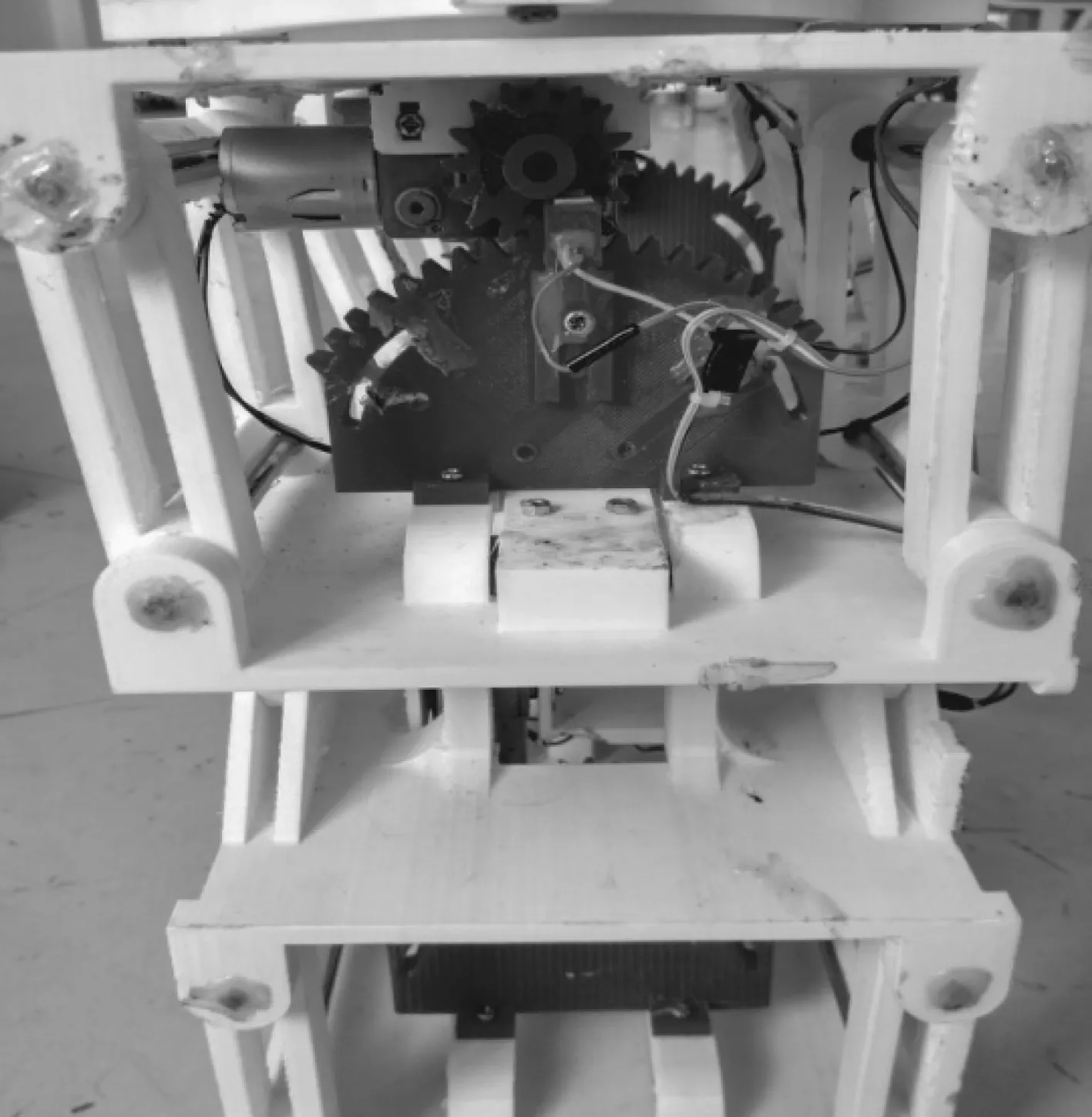
圖6 肢干結構實物圖